多项式法在GPS高程异常拟合中的应用
GPS高程拟合方法及其应用
GPS高程拟合方法及其应用论文介绍了GPS高程拟合的原理。
介绍了多种拟合模型的拟合原理、模型参数的优化选择,给出了利用地表拟合求解较高精度高程异常的方法,将各种模型进行应用对比。
标签:大地高GPS水准高程异常拟合模型1 GPS高程异常当前GPS技术在平面控制测量工作中已经得到了广泛的应用,但在高程控制测量中却未能得到广泛应用。
原因是GPS高程测量得到的是建立在WGS-84坐标系上的大地高H,而我国测量工作中采用的是正常高H。
GPS高程测量可以获得厘米级精度的大地高,但在GPS大地高转换为正常高过程中,由于未能获得同等精度的高程异常ζ,导致转换所得的GPS正常高达不到精度要求。
2高程拟合常用方法拟合法是对GPS观测点进行几何水准联测,同一点的大地高减去正常高得到该点的高程异常,再把测区的似大地水准面假定为多项式曲面或者其他数学曲面去拟合已知高程异常的点,根据拟合的曲面内插其他GPS点的高程异常值。
拟合法进行GPS高程转换的数学模型很多,如多项式曲线拟合、最小二乘平面拟合、二次多项式曲面拟合等,归纳起来可以分为线状拟合模型、平面拟合模型和曲面线状拟合模型三类。
3高程拟合实例分析一测区,选取其中32个GPS水准高程点进行拟合,将32个水准点的X与Y值通过AutoCAD一个简短的VB加载程序展绘成图:方案一:16个起算点均匀分布选取点2,4,8,10,11,13,16,17,19,20,24,25,26,30,31,32十六个点均匀分布于分布已知水准点,经由GPS拟合程序拟合后,计算成果中得拟合高程与水准成果的互差中误差为11.820480毫米。
方案二:16个起算点分布在一侧(非均匀分布)选取点位集中于右下侧,分别为1,2,3,5,9,10,11,14,18,21,22,23,25,27,28,29十六个点。
经由GPS拟合程序拟合后,计算成果中得拟合高程与水准成果的互差中误差为14.631518毫米。
方案三:16个起算点分布在边缘(非均匀分布)选取十六点3,5,6,8,11,12,14,16,17,18,19,20,23,25,28,29分布于网形边缘,经由GPS拟合程序拟合后,计算成果中得拟合高程与水准成果的互差中误差为14.810417毫米。
基于多项式拟合模型的GPS高程转换方法研究

基于多项式拟合模型的GPS高程转换方法研究GPS高程转换是一个在土地测量、建筑工程、环境监测、地质勘探等领域中广泛使用的技术。
GPS测量的高程坐标与标准高程系统(如国家大地水准面)之间存在着误差,因此需要进行高程转换。
本文将介绍一种基于多项式拟合模型的GPS高程转换方法。
多项式拟合模型是一种数学模型,可以用于拟合一组离散数据点,以便获取他们之间的函数关系。
在GPS高程转换中,我们可以采集一组样本点,包括GPS高程坐标和标准高程坐标,然后使用多项式拟合模型来拟合这些数据。
通过拟合后得到的函数关系,我们可以将GPS高程坐标转换为标准高程坐标。
具体来说,我们可以采集一组N个GPS高程坐标和对应的标准高程坐标:(x1,y1),(x2,y2),...,(xN,yN)其中,xi为GPS高程坐标,yi为标准高程坐标。
然后我们可以通过多项式拟合模型来拟合这组数据,得到一个k次多项式:f(x)=a0+a1x+a2x^2+...+akx^k其中,a0,a1,...,ak为多项式系数。
通过求解这些系数,我们可以得到一个拟合函数f(x)。
然后,我们可以将GPS高程坐标x带入这个拟合函数中,得到标准高程坐标y:y=f(x)这样,我们就可以通过多项式拟合模型实现GPS高程转换。
需要注意的是,为了确保拟合的准确性,我们应该选择适当的多项式次数k。
如果k过小,我们可能无法完全拟合样本数据,导致误差较大;如果k过大,我们可能会过度拟合数据,导致模型过于复杂,容易产生过拟合误差。
因此,需要根据数据量和样本特点选择合适的多项式次数。
总之,基于多项式拟合模型的GPS高程转换方法具有简单易操作、精度高等优点。
在实际应用中,可以通过采集一定数量的GPS高程点和标准高程点,建立多项式拟合模型,实现高效精准的GPS高程转换。
多项式拟合法探测GPS周跳的探讨

多项式拟合法探测 GPS周跳的探讨摘要:本文首先讨论了周跳产生原因以及探测与修复的常用方法,然后详细探讨了多项式拟合法探测GPS周跳的方法,以及此方法在不同周跳比率下的探测效果。
通过对探测结果的分析,得出了有益的结论。
关键字:周跳探测多项式拟合一概述用GPS测量时,由于障碍物的遮挡等原因,会造成卫星信号的失锁,当接收机从新接收到失锁卫星的信号后,信号的小数部分不受影响,但丢失了一些整数部分,之后接收到的数据都会与之前接收到的数据相差一个常数,这一常数称为周跳。
周跳探测与修复的方法有高阶差分法、多项式拟合法、三差选权迭代法、电离层参差法等[1][3][4]。
本文主要探讨多项式拟合法探测周跳的方法。
二多项式拟合法原理多项式拟合法是用时间多项式拟合观测值序列,求出拟合残差,通过分析拟合残差来确定周跳位置和周跳大小[2]。
本文的多项式拟合法选用双差观测值。
为了使周跳以粗差的形式出现,需要对双差观测值做历元间差分,每个差分数据的拟合方程可表示为:拟合计算的过程采用迭代计算,每次迭代计算之后,将残差与拟合标准差进行比较,大于三倍标准差的就认为存在周跳,标记为粗差。
当两次迭代的标准差小于限差时停止迭代,然后分析拟合残差,找出周跳的位置并确定大小。
三数据分析采用了两个测站的观测数据,观测时间10分钟,历元间隔为10秒,共61个历元。
原始观测数据中不存在周跳,选择两个测站的28号卫星和08号卫星的数据组成双差观测值,然后历元间差分,得到三差观测值。
不存在周跳的双差观测值和三差观测值如图1所示:图1 双差值以及三差值图形在第一个测站的28号卫星的原始观测值中模拟周跳,共模拟了21组周跳,周跳数约占总三差观测值的33%,模拟的周跳值如表1所示:表1 模拟周跳(单位:周)历元周跳历元周跳历元周跳31225745321012611446-121112330-1115010 12-25353355220-5936256-3212375660122-140-62061-5存在模拟周跳的三差观测值、拟合的三差观测值以及它们之间的差值如图2所示:图2 三差值、拟合值及拟合残差图形从图2中可以看出:三差观测值序列中存在多处周跳,而拟合的三差观测值图形非常的平滑,拟合残差图形中存在多处异常残差,它们反映出了周跳的位置和大小。
多项式拟合GPS水准高程软件设计与实现
多项式拟合GPS水准高程软件设计与实现
贺永成;王文飞
【期刊名称】《矿山测量》
【年(卷),期】2016(044)004
【摘要】文中主要阐述了多项式高程拟合模型中的二次多项式拟合和三次多项式拟合.通过对这两种常用多项式拟合模型原理分析、算法过程的推导,精度评定方法的研究,基于MicrosoftVisual C++ 6.0语言平台,进行多项式拟合模型程序开发.【总页数】4页(P35-38)
【作者】贺永成;王文飞
【作者单位】陕西省一八五煤田地质有限公司,陕西榆林719000;陕西省一八五煤田地质有限公司,陕西榆林719000
【正文语种】中文
【中图分类】P228.4
【相关文献】
1.GPS水准高程拟合方式的选择及精度分析 [J], 陈起谟
2.利用原有似大地水准面成果多项式拟合GPS/水准高程的精度估计 [J], 沈飞;宋玉兵;隋铭明
3.工程测量中GPS水准高程模型的应用探讨 [J], 陈福金
4.基于Matlab的GPS水准高程拟合精度评定分析 [J], 苏凡伟;杜伟超;姜海港
5.GPS水准高程转换模型在工程测量中的应用研究 [J], 李志懂
因版权原因,仅展示原文概要,查看原文内容请购买。
GPS高程拟合的方法及实现
GPS高程拟合的方法及实现GPS高程拟合的方法及实现【摘要】为了利用GPS高程拟合方法把GPS高程信息转捩成工程工程需要的正常高,利用GPS代替常规的水准潮量,是一个值得研究的问题。
文章分析了GPS 高程拟合的方法的现状,具体的GPS高程拟合的方法。
【关键词】GPS 正常高精度高程拟合中图分类号:P228.4 文献标识码:A 文章编号:近些年来,GPS由于布网灵活、简捷、经济已经广泛应用千工程建设中,GPS测量精度高、速度快、方便实用,具有很高的平面精度,长期以来直接用于测角、测距、测水准等平面测量作业中。
但是,GPS高程应用问题,目前仍在进一步探讨之中。
因为利用GPS测量所得到的高程是地面点的大地高,所以,在一般工程测量中不能直接利用。
随着GPS技术的推广,由GPS测平面坐标已被广泛认同,但是由于GPS高程是相对于WGS一84椭球系的大地高H,即地面点沿法线方向到参考椭球面的距离,在实际应用中,仅具有几何意义而缺乏物理意义。
一、高程拟合原理高程拟合法,是指利用高程异常在较小区域内具有一定的几何相关性这一原理,利用教学,求解正高、正常高或高程异常的方法。
高程拟合法对地理条件的要求比拟高,因此一般仅适用于平原地区,地势异常变化较为平缓,其拟合的准确度可到达几厘米以内。
计算比拟精准,而对山区高程异常变化剧烈的地区,高程拟合法的作用就不是那么明显了,由于高程异常的点很难将高程异常的特征表示出来,这种方法的准确度有限。
通过水准测量测得正常高和通过GPS测量测定大地高是测量高程异常的点的高程异常值的一般方法。
在实际工作中,常用的方法一般有:在水准点上布设GPS点、对GPS点进行水准联测,有时为了获得好的拟合结果要求采用数量尽量多的点,最好是均匀分布,它们能够将整个GPS网包围起来。
以便获得更加清晰全面的数据。
二、GPS高程拟合的方法现状在传统的大地测量中,正常高是通过重力测量和天文测量的方法确定的。
对大多数测量单位来说,并不具备这两种作业条件。
GPS水准多项式拟合实验研究
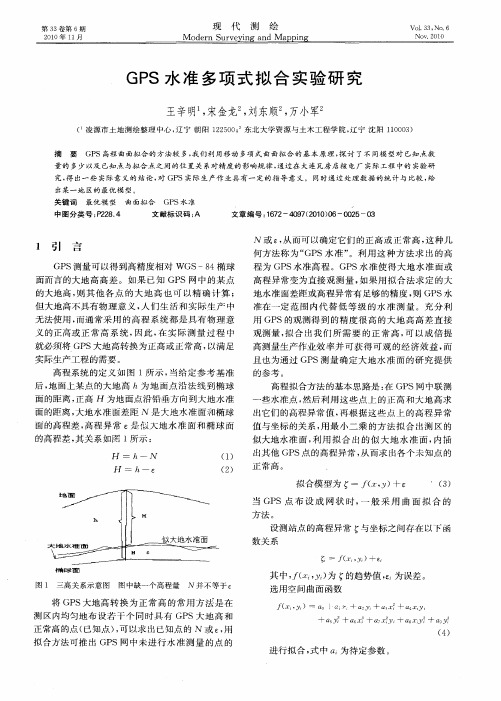
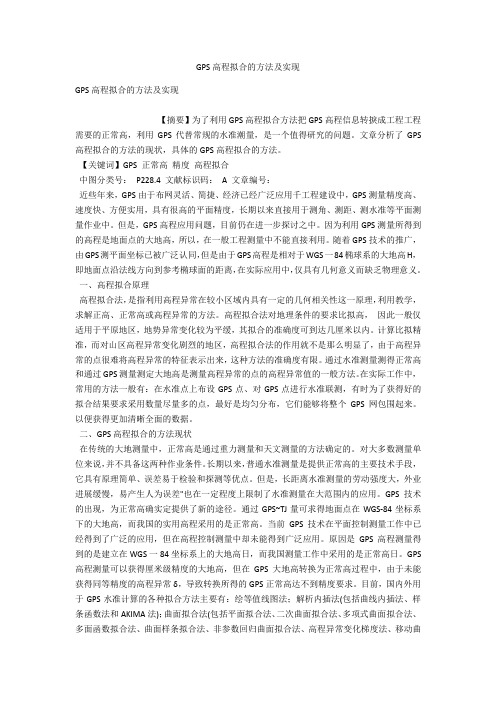
图 1 三高关系示意 图 图中缺一个高程量
选 用空 间 曲面 函数
f x , 二 n J j + 以 4 ( Y )- 。 _ 盘 2 - + n 4
将G S P 大地高转换为正常高 的常用方法是在
测 区 内均匀 地 布设 若 干个 同时 具 有 GP S大 地 高 和
+毗羹 +&£ +R y +a zy 6 7 8 +a g
GP S测 量可 以得 到 高精度 相对 WGS一8 球 4椭 面而言 的大 地 高 高差 。如 果 已知 GP S网 中 的某 点
的大地 高 , 其 他 各 点 的 大 地 高 也 可 以精 确 计 算 ; 则
高 程异 常变 为直 接 观 测 量 , 果 用 拟 合 法求 定 的大 如
地 水准 面差 距或 高程 异 常有 足够 的精 度 , GP 则 S水
些水 准 点 , 后利 用 这 些 点 上 的正 高 和 大地 高求 然
面 的距 离 , 大地 水准 面差 距 N 是大 地 水 准 面和 椭球 面 的高程差 , 程 异 常 e 似 大地 水 准 面 和 椭球 面 高 是
的高程 差 , 关 系如 图 l 其 所示 :
H — h— N H = = =h— e () 1 ( 2)
一 以 + a z + a + 吼 + . 。 1 2 7 + 以 + 以 2 5 6 + 嘶 +“2 8. 2 + a + £ ( 9 i一 1 2, 4 … … ) , 3, …
下 面给 出每种 模块 的拟 合数据 :
模块 一 : 平面拟 合
① 以 G 0 , S 2G 0 ( S 1G 0 , S 3 内推 ) 已知 点建 立平 为 面模 型 , 对其他点进行高程 拟合 , 果如下 表 : 成 这里 只 列最 大误 差与最小误差 平均误差与 中误 差即可 。
浅谈水利工程测量中GPS高程拟合法应用

浅谈水利工程测量中GPS高程拟合法应用1 GPS高程测量拟合原理GPS大地高是GPS观测基线向量计算得到的测站点P到WGS-84椭球体面上的距离,用符号(H)表示。
H是一个相对量,采用不同的橢球定位会有不同的量值。
高程是P点到似大地水准面的距离,称之为正常高,用(h)表示。
GPS大地高和高程的关系可用下式表示:h = H 一(1)式中,是似大地水准面到椭球体面的差距,称之为高程异常值,它和地球的质量分布有关。
如果高精度的值可以求得,由式(1)可得高程h。
用这种方法求得的高程为GPS高程。
求值的方法很多,工程应用中一般采用拟合法,它要求在待测点的周围布测一定密度、分布合理的水准点,在其上进行GPS观测,求得这些点的大地高,称这些点为高程公共点。
用高程公共点的值内插待测点的值,它的准确程度很大程度上取决于高程公共点的密度和合理的分布。
2 确定高程异常的GPS水准法目前采用较为广泛的确定高程异常值的方法为解析法即拟合法,即根据一定的规律建立数学模型,对似大地水准面进行拟合,建立模型后根据网店的位置参数计算测量任一点的高程异常值。
设任一点的平面坐标为(X,Y),其高程异常值为=f(X,Y),其中f(X,Y)为测区似大地水准面相拟合的数学面。
(1)水准多项式曲线拟合法选用一个次数多项式作为插值函数,则与其坐标x(或y)的关系为:(3)(2)平面拟合法根据测区实际情况进行平面拟合:f(X,Y)=a0+a1X+a2y (4)(3)二次曲面拟合法根据测区实际情况进行二次曲面拟合:F(X,Y)= a0+a1X+a2y+a3X2+a4Xy+a5y2 (5)二次曲面拟合法是认为高程异常在一定范围内变化平缓的前提下,将高程异常近似地看作是一定范围内各点坐标的曲面函数,用这一拟合函数来计算其它GPS点的高程异常和正常高。
(4)多面函数拟合法多面函数法是一种从几何观点出发来解决根据数据点形成一个平差的数学曲面问题的方法。
其理论根据是认为"任何一个圆滑的数学表面总可以用一系列规则的数学表面总和以任意的精度逼近"多面函数的核函数为:(6)其中(7)其中表示被选作中心点的已知数据点间的最大距离;表示坐标中心点;坐标核函数。
GPS-RTK高程拟合方法-多项式函数法

中有不少资料将似大地水准面看成曲面或平面,有的还把平
面拟合理解为用平面代替似大地水准面。在这里,我们先讨
论用平面代 替 似 大 地 水 准 面 是 什 么 拟 合,再 进 行 可 行 性 分
析。
为了研究方便,我们把似大地水准面看成是球面,如图 1
- 1 所示,设 C’AB’为水准面,则 A 点与 B’点同高,AB’所对
根据测区的实际情况和公式( 2) 可知,f( x,y) 对应有三
种常用数学模型:
平面拟合: f( x,y) = a0 + a1 x + a2 y
( 3)
二次曲面拟合: f( x,y) = a0 + a1 x + a2 y + a3 x2 + a4 xy
+ a5 y2
( 4)
三次曲面拟合: f( x,y) = a0 + a1 x + a2 y + a3 x2 + a4 xy
依此类推,公式( 4) 和( 5) 是曲面拟合。
一般来说,根据 测 区 实 际 情 况,确 定 适 宜 的 高 程 异 常 拟
合数学模型,并根 据 已 知 联 测 控 制 点 的 高 程 异 常,用 最 小 二
乘拟合法确定拟合数学模型的系数。
四、用平面代替似大地水准面的可行性分析
网络上有很多关于 GPS 高程拟合的论文和培训资料,其
正常高系统是以似大地水准面为基准的高程系统。某
点的正常高是该点到通过该点的铅垂线与似大地水准面的
交点之间的距离,正常高用符号 HY 。大地高与正常高之间 存在一个高程异常 ξ,它们的关系为
HY = H – ξ
( 1)
只要求出高程异常,就能将 GPS 测得的大地高转换为正
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘 要: 使用多项式法对某区域高程异常插值计算, 通过对不同参数的实验分析, 得到了该区域的最 优插值结果
的参数; 提出了多项式法与反距离加权平 均法的 综合计算 模型, 插 值计算结 果精度 比传统多 项式法 提高 了一个
数量级。
关键词: 多项式法; 高程异常; 综合模型
中图分类号: P228. 4
Abstrac t: Th is paper carried ou t the interpo lating ca lcu la tion fo r he ight anom aly o f an area using mu ltinom ia lm ethod. T hrough the ex perim enta l analysis o f different param eters, it acqu ired the param eters o f optima l interpo la tion resu lts for the area. Then it put forw ard the integ ra tive ca lculation model o fm ultinom ial me thod and inverse d istance w eighting m ethod. Com pared w ith the trad itionalm ultino m ia lm ethod, the accuracy o f interpo la ting ca lcu la tion resu lts is improved by a lm ost one orde r o fm agnitude. K ey word s: mu ltinom ia lm ethod; he ight anom aly; integ ra tive model
文献标识码: B
文章编号: 1672- 5867 ( 2010 ) 03- 0174 - 02
Application ofM ultinom ialM ethod in GPS H eight Anom aly Fitting
FANG Y i- feng ( Guan gdong H u izhou G eologica l Survey and E ngin eer ing Invest iga tion Corporation, H uidong 516300, Ch ina)
点。本文首先选取出了多项式法拟 合高程异常的 最优 参数, 提出了多项式法的综合模型, 最后给出算例 验证 结果。
1 高程异常拟合的基本方法
1. 1 加权平均法
加权平均法 [2] 的基本思想是将权函数看作是距离倒
数的幂次方, 若取指数为 m, 则:
n
(di )- m Zi
Z (x, y) =
i= 1
!+
apxpi ) ] 2, 使 ∀m in这就是在最小二乘法意义下的趋势曲面
拟合。求 对 a0, a1, !, ap 的偏导数, 并令其等于 0, 令:
1 x11 x 21 ! xp1
z1
a1
X = 1 x12 x 22 ! xp2 Z = z2
A = a2
1 x1n x 2n ! xpn
zn
an
在实际应用中, 对于特定的遥感数据, 不同的分类方 法的分类精度不同, 而且同一个分类方法对不同类别的 分类精度也不同。通过专家对各种分类方法在遥感数据 分类中的应用研究, 基本认为没有哪一个分类方法是万 能的。这是因为, 遥感数据分类的精度决定于分类过程 的各个环节, 包括分类特征选择和提取、适当的数据先验 知识以及合适的分类方法等。真实地表的遥感数据是复 杂的, 同一遥感数据中不同类别数据的统计分布特征也 是不同的, 因此在同样的分类方法下, 不同类别的分类精 度差别很大, 而且 这种差别随 不同的分类 方法而不同。 常常出现一些分类方法对一部分类别的分类精度高, 而 另一些分类方法则对另一部分类别分类精度高。从这个 意义上说, 不同的分类方法之间可能有一定的互补性。
得到 X TXA = X T Z, 计算可得:
A = (X TX ) - 1XT Z
( 5)
将式 ( 5) 代入式 ( 4) 即可加密每一点的高程值。本文使用
的权函数为:
w (d ) = 1 / ( 1 + d2 /a2 )
( 6)
式中: a 为常数, 可由试验给定, 一般应取数据点平均间距
的两倍为宜。考虑权因素后, 式 ( 5)变为:
4 结束语
对遥感影像的精度影响因子从 3个方面进行了分析: 遥感数据本身的分辨率, 数据处理过程中的数据融合与 图像分类方法对精度的影响以及精度评价方法对遥感精 度的影响。通过分析可以发现, 数据的空间分辨率和光 谱分辨率对精度的影响相当明显; 数据融合和图像分类 方法要根据遥感数据的使用目的选择合适的方法才能达 到较好的分类精度; 精度评价方法对精度的影响是存在 的, 结果存在一定的随机性 [ 5] 。
定精度, 则可以代替低等级的水准测量。 传统的多项式法均拟合成趋势面, 这种趋势面采用
不同的幂级多项式来拟合复杂的曲 面, 起到了削 平、填 平真实曲面的作用。为了得到待定 点位更加逼 近真实
值的拟合值, 便不宜直接使用该方法, 因此将多 项式法 与其他方法结合起 来拟 合待定 点值, 是本文 研究 的重
A = (XT PX ) - 1XT P Z
( 7)
将式 ( 7)代入式 ( 4) 即可得到待求点的高程。
2 综合模型
文中提出了多项式法与反距离加权平均法的综合模
型, 从综合模型的本质分析可知, 混合拟合模型同时考虑
了高程异常的中长波项和短波项的影响, 其理论上更为
合理, 因此该模型更为可靠。文中方法对各已知数据点
的残差:
zi = f (xi, yi ) - z(xi, yi ), ( i = 1, !, n)
( 9)
利用反距离加权平均法将残差插值处理后分配到趋
势面拟合值上即得到最终待求点值:
f* ( xi, yi ) = f ( xi, yi ) + z*i
( 10)
3 最优参数选取及综合模型的精度验证
当多项式的最高阶数 n0 不同时, 式 ( 4) 的系数阵 X 也不相同, 计算得到的插值结果也有差异。本文针对某 一地区采用多项式法选取不同阶次 和搜索半径 进行实 验, 通过对内插结果的精度进行对比分析, 得到该区最优
3 遥感精度评价抽样方法对遥感数据精度 的影响
同一遥感分类结果, 精度评价的方式不同, 评价结果 就有可能不同, 因此很有必要对遥感精度评价过程中影
响精度评价结果的各种因素进行分析。一般地, 目前影 响遥感精度评价结果的因素主要包括抽样方法、参考数 据和评估参数 3个方面, 其中, 抽样方法和抽样样本的设 计和选择尤为关键 [ 4]。
值和趋势面之间的残差作进一步处 理后分配到 各待求
点, 于是待求点值即为趋势面值与残差拟合值之和。
首先, 根据 1. 2节中的方法对测区中已知高程异常值
拟合一个多项式趋势面:
nk
n
k
f (x, y) =
aki
x (k- i)
yi
( 8)
k= 1 i= 1
k= 1
i= 1
其次, 求出多项式趋势面在样点处的值与样点数据
( 3)
式中: i 为残差。当式中 ( xi, yi )变化时可以计算出每一
个点的趋势值和残差。则:
Z^ = a0 + a1x + a2 y + a3xy + a4x2 + a5y2 + ! = XA ( 4)
其残差平方和为
n
= i= 1 [ zi -
z^i ]
2
=
n
[
i= 1
zi -
(a0 + a1x+
第 33卷 第 3期 2010年 6月
测绘与空间地理信息
GEOMAT ICS & SPAT IAL IN FORMAT ION TECHN OLOGY
V o .l 33, N o. 3 Jun. , 2010
多项式法在 GPS高程异常拟合中的应用
方亿锋
(广东省惠州七五六地质测绘工 程公司, 广东 惠东 516300)
n0 k
多项式模型公式为
Z (X,
Y)
= a k = 0i= 0 k,
X Y , ( k - i) i[ 3- 5]
i
n0
为多项式的次数。设地面实际观测数据为 Zi ( xi, yi ) ( i=
1, 2, !, n ), 多项式拟合值为 Z^i (xi, yi ), 则有:
Zi ( xi, yi ) = Z^i ( xi, yi ) + i
n
(di )-m
( di
0)
( 2)
i= 1
Zi
( di = 0)
式中: Z (x, y )表示坐标点 ( x, y )上的插值结果; Zi 为第 i
点的已知值; di 为第 i点与插值点之间的距离。
影响加权平均法精 度的主要 参数是 指数 m。对式
(2 )分别取不同的 m 值, 插值计算并计算检核点的插值精 度, 得到适合实验区域的经验权函数 ( di ) - m。反距离加 权平均法选取 m 的值为 2, 文中在综合模型计算时采用此
图 2 不同参数的多项式插值结ቤተ መጻሕፍቲ ባይዱ F ig. 2 Th e resu lts of m u ltin om ial in terpo lation
u sing differen t param e ters 如图 2所示, 针对该区域 2阶的结果优于 1 阶计算。 1阶、2阶和 3阶插值计算时, 式 ( 4)分别有 3个、6个和 10 个系数, 也就是说为了使式 ( 4) 有解, 待求点的搜索范围 内至少有 3个、6个与 10个起算点才能满足系数阵可逆, 因此分别采用 1阶、2 阶和 3阶计算时, 图 2中最小搜索 半径分别为 0. 12, 0. 15和 0. 18。 根据图 2得出结论 1: 针对该地区高程异常插值, 多 项式法的参数设置为 R = 0. 16~ 0. 18、计算阶次为 2时得 到的插值结果效果最好。 为了验证多项式法与加权平均法的综合模型的插值 精度, 利用单一拟合方法与文中提出的混合方法得到的 插值结果统计见表 1。 采用改进模型时, 首先利用多项式法将高程异常的 中长波部分滤掉, 再采用反距离加权平均法对残差插值 处理并分配到待求点上。