汽车电子控制技术(Bilingual 12.14)
《汽车电子控制技术》电子教案
第一章:汽车电子控制技术概述1.1 汽车电子控制技术的定义与发展历程1.2 汽车电子控制技术的分类与作用1.3 汽车电子控制技术在我国的应用与发展第二章:发动机电子控制技术2.1 发动机电子控制技术的原理与组成2.2 电控燃油喷射系统2.3 电控点火系统2.4 电控变速器第三章:汽车底盘电子控制技术3.1 汽车底盘电子控制技术的原理与组成3.2 电子制动力控制系统3.3 电子悬挂控制系统3.4 电子辅助转向系统第四章:汽车车身电子控制技术4.1 汽车车身电子控制技术的原理与组成4.2 防盗系统4.3 舒适性控制系统4.4 车载娱乐系统第五章:汽车电子控制技术的未来发展5.1 汽车电子控制技术发展趋势5.3 车联网与自动驾驶技术第六章:电控燃油喷射系统的工作原理与故障诊断6.1 电控燃油喷射系统的组成与工作原理6.2 电控燃油喷射系统的故障诊断与排除方法6.3 常见故障案例分析第七章:电控点火系统的原理与维修7.1 电控点火系统的结构与工作原理7.2 点火系统的检修方法与注意事项7.3 点火系统故障案例分析第八章:电控自动变速器的设计与维护8.1 电控自动变速器的原理与类型8.2 自动变速器的检查与维护方法8.3 自动变速器常见故障分析第九章:汽车电子制动系统技术9.1 电子制动系统的结构与原理9.2 电子制动系统的检修与维护9.3 电子制动系统故障案例分析第十章:汽车电子控制系统的编程与升级10.1 汽车电子控制系统的编程技术10.2 汽车电子控制系统的升级方法10.3 编程与升级过程中的注意事项第十一章:车身电子控制系统的设计与维护11.1 车身电子控制系统的组成与功能11.2 车身电子控制系统的维护与检修方法11.3 车身电子控制系统故障案例分析第十二章:新能源汽车电子控制技术12.1 新能源汽车电子控制技术概述12.2 电动汽车控制系统12.3 混合动力汽车控制系统12.4 新能源汽车电子控制技术的挑战与机遇第十三章:车联网技术及其在汽车电子控制中的应用13.1 车联网技术概述13.2 车联网在汽车电子控制中的应用13.3 车联网技术的发展趋势第十四章:自动驾驶技术及其挑战14.1 自动驾驶技术概述14.2 自动驾驶技术的实现原理14.3 自动驾驶技术的挑战与未来发展第十五章:汽车电子控制技术的创新与前沿15.1 汽车电子控制技术的创新趋势15.2 车用传感器技术的发展15.3 在汽车电子控制中的应用重点和难点解析本文主要介绍了汽车电子控制技术,包括概述、发动机电子控制技术、底盘电子控制技术、车身电子控制技术、未来发展趋势等内容。
《汽车电子控制技术》电子教案

《汽车电子控制技术》电子教案第一章:汽车电子控制技术概述1.1 课程介绍1.2 汽车电子控制技术的发展历程1.3 汽车电子控制技术的应用领域1.4 学习目标与要求第二章:发动机电子控制技术2.1 发动机电子控制技术简介2.2 电控燃油喷射系统2.3 电控点火系统2.4 学习目标与要求第三章:自动变速器电子控制技术3.1 自动变速器电子控制技术简介3.2 电控自动变速器的基本原理3.3 电控自动变速器的控制策略3.4 学习目标与要求第四章:制动系统电子控制技术4.1 制动系统电子控制技术简介4.2 电子控制防抱死制动系统(ABS)4.3 电子控制牵引力控制系统4.4 学习目标与要求第五章:车身电子控制技术5.1 车身电子控制技术简介5.2 电子控制悬架系统5.3 电子控制转向系统5.4 学习目标与要求第六章:电子控制燃油喷射系统6.1 燃油喷射系统的作用与类型6.2 电子控制燃油喷射系统的组成6.3 电子控制单元(ECU)的工作原理6.4 学习目标与要求第七章:电子控制点火系统7.1 点火系统的作用与类型7.2 电子控制点火系统的组成7.3 点火提前角的控制策略7.4 学习目标与要求第八章:电子控制防抱死制动系统(ABS)8.1 ABS系统的工作原理8.2 ABS控制策略与算法8.3 ABS系统的组件与功能8.4 学习目标与要求第九章:电子控制悬架系统9.1 悬架系统的作用与类型9.2 电子控制悬架系统的组成9.3 悬架控制策略与算法9.4 学习目标与要求第十章:电子控制转向系统10.1 转向系统的作用与类型10.2 电子控制转向系统的组成10.3 转向控制策略与算法10.4 学习目标与要求第十一章:电子控制自动变速器11.1 自动变速器的作用与类型11.2 电子控制自动变速器的组成11.3 换挡控制策略与算法11.4 学习目标与要求第十二章:电子控制牵引力控制系统12.1 牵引力控制系统的作用与类型12.2 电子控制牵引力控制系统的组成12.3 牵引力控制策略与算法12.4 学习目标与要求第十三章:车载网络通信技术13.1 车载网络通信技术概述13.2 常见车载网络通信协议13.3 车载网络通信系统的应用13.4 学习目标与要求第十四章:安全气囊系统14.1 安全气囊系统的作用与类型14.2 电子控制安全气囊系统的组成14.3 安全气囊的控制策略与算法14.4 学习目标与要求第十五章:汽车电子控制技术的发展趋势15.1 新能源汽车电子控制技术15.2 车联网与智能驾驶技术15.3 汽车电子控制技术的创新应用15.4 学习目标与要求重点和难点解析重点:1. 汽车电子控制技术的发展历程和应用领域。
汽车电子控制技术3篇
汽车电子控制技术第一篇:汽车电子控制技术的概述汽车电子控制技术是指利用电子技术控制汽车各个部件的运行和状态,从而提高汽车的安全性、可靠性和性能等方面。
汽车的电子控制系统包含多个子系统,如发动机控制系统、变速器控制系统、制动系统、转向系统、底盘控制系统、车身控制系统等。
这些子系统之间相互配合,共同保证汽车的正常运行和安全性能。
汽车电子控制技术的发展是日新月异的,随着科技的进步和新材料、新技术的不断涌现,汽车电子控制系统不断地升级和改进。
现代汽车电子控制系统主要采用数字化控制和网络通信技术,具有高精度、高速度、高可靠性和高可扩展性等特点。
近年来,汽车电子控制技术已经向无人驾驶和智能交通领域延伸,成为推动整个汽车产业发展的重要力量。
总的来说,汽车电子控制技术的发展给我们带来了更加安全、舒适和便捷的驾驶体验,同时也为汽车工业的可持续发展提供了重要的支持和保障。
第二篇:汽车发动机控制系统汽车发动机控制系统是汽车电子控制系统中最重要、最核心的一部分,它的主要任务是控制发动机的点火、供油、喷油和排放等方面的参数,使发动机能够在最优的状态下运转,提高汽车的燃油经济性和动力性能。
现代汽车发动机控制系统主要采用电子控制单元(ECU)对发动机进行监测和控制。
通过各种传感器,如氧气传感器、水温传感器、气缸压力传感器等,ECU可以实时地监测发动机的状态,然后调整点火时机、油门开度、喷油码等参数,使发动机在不同工况下达到最优的燃烧效果。
汽车发动机控制系统还可以通过故障码诊断功能,精确地检测和诊断发动机故障。
一旦发现故障,ECU可以及时调整控制参数,保证发动机不失效,维护汽车的可靠性和安全性能。
总体来说,现代汽车发动机控制系统已经很成熟,但是在使用过程中还是需要定期保养和检验,以确保发动机的正常运转和使用寿命。
第三篇:智能化和无人驾驶技术在汽车电子控制系统中的应用随着人工智能技术的不断发展,无人驾驶技术已经成为汽车电子控制技术的热点和发展方向。
汽车电子控制技术》电子教案
汽车电子控制技术》电子教案第一章:汽车电子控制技术概述1.1 课程介绍本课程旨在帮助学生了解汽车电子控制技术的基本概念、发展历程和应用领域。
通过学习,学生将能够掌握汽车电子控制技术的基本原理,了解各种电子控制系统的构成和功能,以及掌握汽车电子控制技术的发展趋势。
1.2 教学目标了解汽车电子控制技术的基本概念和发展历程。
掌握汽车电子控制技术的基本原理和应用领域。
熟悉汽车电子控制技术的发展趋势。
1.3 教学内容汽车电子控制技术的定义和发展历程。
汽车电子控制技术的基本原理。
汽车电子控制技术的应用领域。
汽车电子控制技术的发展趋势。
1.4 教学方法采用讲授、案例分析、小组讨论等方式进行教学。
1.5 教学评估通过课堂讨论、作业和考试等方式进行评估。
第二章:发动机电子控制技术2.1 课程介绍本章将介绍发动机电子控制技术的基本原理、构成和功能,包括燃油喷射控制、点火控制、排放控制等方面。
通过学习,学生将能够了解发动机电子控制技术的关键技术,并掌握其工作原理和应用。
2.2 教学目标了解发动机电子控制技术的基本原理和构成。
掌握发动机电子控制技术的关键技术和应用。
2.3 教学内容发动机电子控制技术的基本原理。
燃油喷射控制技术。
点火控制技术。
排放控制技术。
2.4 教学方法采用讲授、案例分析、实验等方式进行教学。
2.5 教学评估通过课堂讨论、作业和实验报告等方式进行评估。
第三章:汽车电子控制单元(ECU)3.1 课程介绍本章将介绍汽车电子控制单元(ECU)的基本原理、构成和功能。
学生将学习ECU的工作原理,了解其硬件和软件构成,以及掌握ECU 在汽车电子控制系统中的应用。
3.2 教学目标了解汽车电子控制单元(ECU)的基本原理和构成。
掌握ECU的工作原理和应用。
3.3 教学内容汽车电子控制单元(ECU)的定义和作用。
ECU的基本原理和工作过程。
ECU的硬件和软件构成。
ECU在汽车电子控制系统中的应用。
3.4 教学方法采用讲授、案例分析、实验等方式进行教学。
电子行业汽车电子控制技术

电子行业汽车电子控制技术引言随着社会的不断发展和科技的进步,汽车行业也在快速发展。
车辆的性能、功能和安全性需求也随之增加。
而汽车电子控制技术作为汽车行业的核心技术之一,起到了至关重要的作用。
本文将介绍电子行业汽车电子控制技术的定义、特点、应用和未来发展。
定义汽车电子控制技术是指通过电子设备和电脑系统来控制汽车的各项功能。
这些电子设备和电脑系统能够对汽车的引擎、传动系统、悬挂系统、刹车系统以及安全系统进行监测和控制。
通过电子控制技术,可以提高汽车的性能、安全性和舒适性。
特点1.高度智能化:电子控制技术能够通过传感器和计算机系统监听页面和分析车辆的各项指标,根据情况进行相应的调整和控制。
这使得汽车能够根据路况、驾驶习惯和环境变化做出智能决策,提供更好的驾驶体验。
2.多功能性:电子控制系统可以集成多种功能,如动力控制、车辆稳定性控制、自适应巡航控制、自动紧急制动等。
这些功能的集成使得汽车能够适应不同的驾驶环境和需求,并提供更加安全和便利的驾驶体验。
3.网络化:现代汽车电子控制系统通常具有网络功能,可以与其他电子设备和车辆进行通信和数据交换。
这种网络化使得车辆能够接入互联网,实现远程控制、车载娱乐、导航和无线通信等功能。
应用电子行业汽车电子控制技术的应用范围非常广泛,常见的应用领域包括但不限于以下几个方面:1. 引擎控制系统汽车的引擎控制系统是电子控制技术的一个重要应用领域。
通过传感器获取引擎的工作状态,利用电脑系统对燃油喷射、点火时机等进行精确控制,以提高燃烧效率和动力输出。
2. 刹车系统电子控制技术在汽车刹车系统中的应用可以提供更好的制动效果和安全性能。
通过传感器监测车辆的车速、刹车力度等参数,并利用电脑系统对制动液压系统进行精确控制,实现更快速、更准确的刹车响应,避免制动失效和侧滑。
3. 安全系统现代汽车的安全系统主要包括车辆稳定性控制、碰撞控制、自适应巡航控制、胎压监测等。
这些安全系统通过传感器和电脑系统对车辆行驶状态进行实时监测,并根据情况作出相应的控制和提示,提高驾驶安全性。
汽车电子控制技术

汽车电子控制技术第一篇:汽车电子控制技术的发展汽车电子控制技术是指利用电子设备控制汽车的运行,包括发动机控制、变速箱控制、底盘控制、车身掌控等方面。
汽车电子控制技术的发展可以追溯到上世纪70年代,当时美国的汽车工业处于迅速发展的阶段,各大汽车厂商互相竞争,推出了各种各样的新型汽车。
而在这个过程中,电子控制技术逐渐成为了汽车制造的重要领域之一。
最初的汽车电控技术主要是利用传感器收集车辆数据,然后通过一些简单的逻辑电路来控制发动机和车身的运行,但是这种技术的局限性很大。
到了上世纪80年代,随着计算机技术的发展,微处理器和现场可编程控制器(PLC)开始被广泛应用于汽车电子控制技术领域。
由此,汽车的控制系统逐渐从简单的逻辑电路转向了可编程电子设备和微处理器控制。
上世纪90年代,汽车电子控制技术得到了飞速发展。
工程师们开始利用器件集成技术将所有的控制单元集成到一个控制模块中,从而大大降低了汽车控制系统的体积和成本。
到了21世纪,汽车电子控制技术得到了更加迅速和深刻的发展。
现在,汽车制造商已经可以利用高级计算机、大型数据库以及云计算技术来收集和处理车辆数据,同时也可以利用人工智能和机器学习技术来优化汽车的控制系统。
总的来说,汽车电子控制技术的发展一直在不断地加速。
未来,我们可以期待看到更加智能化、自主化和绿色化的汽车出现在我们的生活中。
第二篇:汽车电子控制技术的挑战与未来虽然汽车电子控制技术已经取得了巨大的进步,但是它所面临的挑战也越来越多。
首先,汽车电子控制技术的复杂性越来越高。
现代汽车已经被装备上了各种各样的传感器、控制器和回馈系统,这些设备间的互动也变得非常复杂。
对此,汽车制造商需要尽可能地简化和优化汽车控制系统,确保它们可以同时高效地工作。
其次,保护汽车的数据安全也变得越来越重要。
现代汽车的数据量越来越大,包括驾驶习惯、车辆位置、车辆状况等等,这些数据的泄露可能会影响到汽车及其驾驶员的安全。
汽车制造商需要采取有效的措施来确保汽车数据的隐私和安全。
汽车电子控制技术的研究与应用
汽车电子控制技术的研究与应用汽车电子控制技术,作为现代汽车发展的重要组成部分,其研究和应用已成为当前汽车技术发展的热点之一。
汽车电子控制技术以电子元器件和计算机技术为基础,通过对汽车各个系统进行精密计算和控制,实现汽车运行的智能化和自动化,提高汽车的性能和安全性。
本文将介绍汽车电子控制技术的研究与应用现状,并探讨其发展趋势和未来的发展方向。
一、汽车电子控制技术的研究与应用现状随着计算机技术和电子元器件的不断发展和普及,汽车电子控制技术在汽车行业中得到了广泛应用。
目前,汽车电子控制技术的研究和应用主要涉及以下几个方面:1. 发动机电控技术发动机电控技术是汽车电子控制技术的重要组成部分,其主要作用是对发动机进行精确控制,以达到高效、经济、环保的目的。
发动机电控技术包括点火控制、燃油喷射控制、排放控制等方面,通过对这些细节的现场控制,使得发动机的效率和经济性得到显著提升。
2. 车身电控技术车身电控技术是现代汽车的重要组成部分,在汽车安全性和驾驶舒适性方面起着至关重要的作用。
车身电控技术包括制动系统、转向系统、悬挂系统、控制连接系统等方面,其主要作用是通过对各个系统的控制,使得车辆在行驶过程中更加安全、舒适。
3. 娱乐电控技术娱乐电控技术是现代汽车的重要组成部分,在提升车辆驾乘乐趣方面发挥着不可替代的作用。
娱乐电控技术包括音响、视频系统、导航等方面,通过对这些细节的精准控制,使得驾乘者在车内得到更好的休闲和享受。
二、汽车电子控制技术的发展趋势随着汽车电子控制技术的不断发展,其未来发展趋势主要集中在以下几个方面:1. 智能化控制技术随着人工智能和大数据技术的快速发展,车辆将越来越智能化。
未来的汽车将具备更强的自主决策能力和智能化控制功能,能够进行空间感知和环境感知,实现更加智能和精准的控制。
2. 网联化技术未来的汽车将更加智能化和网联化,具有高度自主的交通运输能力。
通过车辆间的互联和数据的共享,汽车将成为实现城市交通智慧化的重要载体,为城市交通管理和交通流量控制提供更多的信息支持。
汽车电子控制技术的研究及其在改善汽车性能中的应用
汽车电子控制技术的研究及其在改善汽车性能中的应用近年来,随着汽车技术的不断发展,汽车电子控制技术越来越成为汽车工业领域中的一项重要技术。
汽车电子控制技术是指将计算机、电子、通信及控制技术等高科技应用于汽车的控制领域,用于提高汽车的安全性、经济性和舒适性等关键性能指标。
一、汽车电子控制技术的起源汽车电子控制技术的起源可以追溯到二十世纪初期的汽车车灯控制系统和点火系统。
由于当时电子技术尚不成熟,因此汽车电子控制技术的广泛应用要到上世纪六十年代才开始,随着计算机技术等高科技的不断发展,汽车电子控制技术也取得了长足的发展,到了今天已经成为汽车制造行业的重要技术之一。
二、汽车电子控制技术的应用1、发动机管理系统车辆的发动机是关键的动力源,发动机管理系统(EMS)的主要功能是监测和控制发动机的燃料供应、点火时间、进气压力、燃烧温度、油门位置等参数,从而保证发动机的工作效率和可靠性。
EMS的应用能够有效地提高汽车的性能和燃油经济性,减少污染物排放,从而为环保事业作出贡献。
2、车身控制系统车身控制系统是为了提高汽车行驶的稳定性、舒适性和安全性而设计的。
常用的包括制动系统、悬挂系统、转向系统、稳定控制系统、自适应巡航控制系统等。
通过这些控制系统的应用,车辆的行驶稳定性得到提高,乘坐舒适性得到改善,驾驶安全性得到保证。
3、安全系统安全系统是汽车电子控制技术中的一项重要内容,主要包括车辆制动系统、安全气囊、防盗系统、防火系统等。
安全系统的应用可以保证车辆在紧急情况下能够迅速反应,提供有效的保护措施,最大限度地保证车辆及其乘员的安全。
三、汽车电子控制技术的未来目前,汽车电子控制技术已经成为汽车制造业不可或缺的一部分,并且将在未来继续得到新的发展。
未来汽车电子控制技术的重点将是向更智能、更高效、更安全、更环保的方向发展。
例如,更智能的汽车将涵盖自动驾驶、智能交通管理、智能环境感知等方面的内容,更高效的汽车将针对无人驾驶、新能源驱动等方面展开研究,更安全的汽车则会在人机交互、智能驾驶、智能防撞等方面进行创新,更环保的汽车则会进一步注重使用新能源、减少尾气排放等方面的问题。
汽车电子控制技术课程标准 (2)
《汽车电子控制技术》课程标准课程编码:适用专业:汽车检测与维修技术学时:48学时开课学期: 2012~2013 学年度第一学期一、课程性质本课程是汽车检测与维修专业的一门重要的专业课程。
二、课程培养目标本课程的培养目标是(一)知识目标1、掌握汽车电控系统的结构特点、基本原理以及使用、维护和检修的方法。
2、系统地了解和掌握轿车的电控燃油喷射系统、电控点火系统、辅助控制系统、自动变速器、ABS防抱死制动系统,电子控制悬架系统、电控安全系统、车载网络系统、自诊断系统等一些先进的轿车新技术。
3、掌握汽车电子控制系统的基本知识和各种传感器和执行器的工作原理。
(二)素质目标1、具有自学能力,以适应现代汽车电子控制系统的新结构和新技术发展变化;2、具有运用所学知识与技能解决生产实际问题的能力。
(三)能力目标1、具有元件测试、数据流分析、在线检测和总体故障分析的能力,以及现代汽车维修检测诊断设备的使用。
2、具备汽车检测与维修所必需的汽车电子控制技术基础知识及有关汽车电子控制技术应用基本技能。
三、与前后课程的联系(一)与前续课程的联系本门课程是在先修《汽车发动机构造与维修》、《汽车底盘构造与维修》、《汽车电器构造与维修》、《电工电子技术》等专业课程的基础上在学习的。
(二)与后续课程的联系为学生今后继续学习和应用汽车新技术打下一定的基础。
四、课程内容标准和要求根据专业课程目标和涵盖的工作任务要求,确定课程内容和要求,说明学生应获得的知五、教学资源及实施建议(一)推荐教材《汽车电子控制技术》尹力主编天津科学技术出版社2010年1月(二)教学参考资料《汽车电子控制技术》张蕾主编清华大学出版社2009年6月《现在汽车维修》黄虎夏令伟主编上海交通大学出版社2005年3月《汽车发动机电控技术》王秀红主编大连理工大学出版社2007年11月(三)教师团队及教师素质(四)教学场地、设施、网络资源课堂教学:讲授内容以捷达轿车和别克轿车为主要参考车型;采用实物演示、多媒体教学手段。
汽车电子控制技术(大纲)
汽车电子控制技术一、课程性质和任务本课程是中等职业学校汽车运用与维修专业的一门主干专业课程。
其任务是使学生具备汽车电子设备与控制装置的基本知识和汽车电子控制检测与维修的基本技能。
通过理论教学和实践技能训练,使学生系统掌握汽车电子控制装置的结构、基本工作原理、使用和维修、检测,故障诊断与排除等基本知识和基本技能。
二、课程教学目标(一) 知识教学目标1. 掌握汽车电子控制装置的结构和基本工作原理。
2. 掌握汽车电子控制装置的使用、维护及故障分析的知识。
3. 了解汽车电子控制装置的新产品和新技术。
(二) 能力培养目标1. 能根据汽车电路图,分析汽车电电子控制装置的基本工作情况。
2. 掌握汽车电子控制装置和的检测和维修方法。
3. 掌握汽车电子控制装置故障的诊断和排除方法。
4. 能正确使用汽车检测与诊断设备,维修中常用的工具、设备、仪器和仪表。
四、说明(一) 适用范围和使用方法1. 本课程教学基本要求适用于中等职业学校汽车运用与维修专业,学制3年。
2. 本课程教学内容采用模块结构,包括基础模块、选学模块、实践教学模块。
基础模块和实践教学模块中的基本实验是必须完成的内容,有实际需要的可从选学模块和选做实验中选择内容。
(二) 教学建议1. 在教学中要积极改进教学方法、按照学生学习的规律和特点,从学生的实践出发,以学生为主体,充分调动学生学习的主动性、积极性。
2. 课程教学中应采用教具、图片以及多媒体教学软件,以增加学生的感性知识,启迪学生的科学思维,提高学生的学习兴趣和教学效果。
3. 积极改革考核手段与方法,可通过课外作业、上课提问、平时测验、实践操作、学生情感领域表现(思想道德行为、学习动机、学习态度、课堂纪律等)、考试情况综合评定学生成绩。
对在学习和应用上有创新的学生应特别给予奖励。
五、考核办法1、教师上课严格按照大纲规定的章节和时间安排进行,不得随意更改,如有变更须及时报教导处。
2、教师备课应针对学生特点,抓住重点,突破难点,授课要确保学生听得懂,学得会。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2012/12/22
2
8.5 The ABS functions expand 8.5.1 The ASR system 8.5.2 The ESP system
2012/12/22
3
8.5.2 The ESP system 1. The basic function of the ESP; 2. Vehicle handling characteristic introduction. 3. ESP control systems
2012/12/22 15
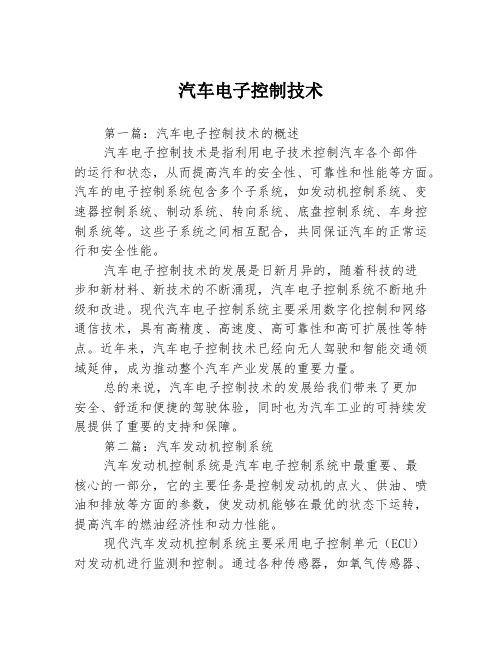
The higher-level controllers input the nominal values to the lower-level controllers in the form of a nominal slip. The "observer" determines the controlled state variable (vehicle slip angle β).
2012/12/22
7
⑸ Depending upon the situation, even better utilization of the adhesion potential between the tires and the road when ABS and TCS intervene, and therefore improved traction and stopping distances in addition to improved steerability and stability.
2012/12/22
6
⑶ Enhances directional stability even during extreme steering maneuvers (panic reactions), resulting in a drastic reduction in the danger of skidding;
⑷ Improved handling behavior also in limit situations. For the driver, this behavior becomes predictable as a function of his (or her) experience. The vehicle remain fully under control even in critical traffic situations;
2012/12/22
5
Further to the advantages inherent in ABS and ASR, ESP improves the active driving safety in the following points:
⑴ Provides the driver with active support, even in laterally critical dynamic; ⑵ Enhances vehicle stability and tracking performance even in limit situations in all operating modes such as full braking, partial braking, coasting, accelerating, engine drag, and load shift;
2012/12/22
14
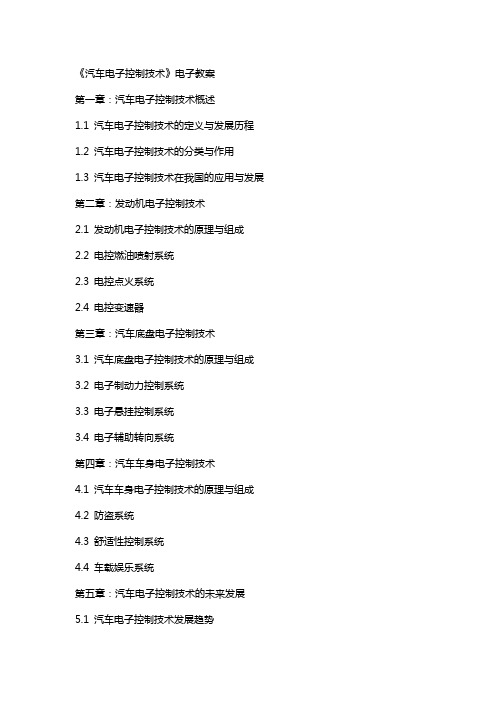
The overall system (see Fig.), shows the vehicle as the controlled system, with Sensors (1...5) for defining the controller input variables, and actuators (6 and 7) for influencing the tractive force and the braking force. Also shown are the hierarchically structured controller comprising the higherlevel vehicle dynamics controller, and the lower-level slip controllers.
2012/12/22
10
Lateral dynamics of a vehicle 1. Step input at steering wheel, steering- wheel angle fixed; 2. Track on highμroad; 3. Track on lowμroad with "open-loop" steering correction and yaw-rate control; 4. Track on low- μ road when the slip angle is also controlled (ESP);
2012/12/22
11
3. ESP control systems ⑴ control The control of the vehicle's behavior at the physical driving limit must influence the vehicle's three degrees of freedom in the plane of the road (longitudinal and lateral velocities, and yaw moment about the vertical axis) so that vehicle handling is in line with the driver's input and with the prevailing road conditions.
18
2012/12/22
In order to determine the desired performance, the signals are evaluated which define the driver's input.
These comprise the signals from the steering-wheel sensor (3, driver's steering input), the brake-pressure sensor (2, desired deceleration input), and the engine management (7, desired drive torque).
brief
2012/12/22
4
1. The basic function of the ESP While ABS prevents wheel lockup when braking and ASR (TCS) prevents spin of the driven wheels, ESP prevents the vehicle from "pushing out" of the turn or spinning out of the turn when it is steered.
2012/12/ed value of vehicle-motion variables ESPcontroller Sideslip- angle control and yaw- rate control
Slip controller with intorface to ESP
2012/12/22
19
Apart from the vehicle speed, the calculation of the desired performance also takes the coefficients of adhesion between the tires and the road into account. These are calculated from the signals outputted by the wheel-speed sensors (1), the lateral-acceleration sensor (5), the yaw-rate sensor (4), and the brake-pressure sensor (2).
2012/12/22
9
Lateral dynamics of a vehicle 1. Step input at steering wheel, steering- wheel angle fixed; 2. Track on highμroad; 3. Track on lowμroad with "openloop" steering correction and yawrate control; 4. Track on low- μ road when the slip angle is also controlled (ESP);
The automoive electronics control technique
Southeast University Mechanical Department
Feng Chong-Yi
2012/12/22
1
Previous lessen content review lessen (12/03/2012): The 8th chapter: The brake system 8.1 brief introduction of the Brake system 8.2 Anti-lock Brake System (ABS) 8.3 Criteria of control quality 8.4 ABS Versions 8.5 The ABS functions expand The contents for today (12/06/2012)