关于各个CPU调速器的说明
EPG及GAC电子调速器调整说明
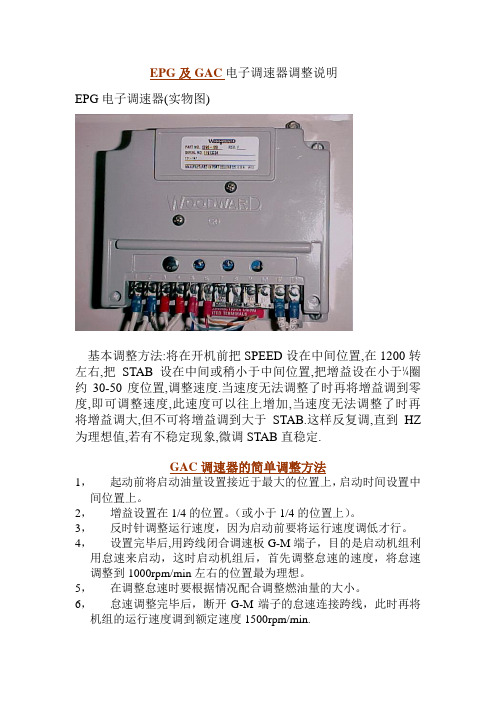
EPG及GAC电子调速器调整说明EPG电子调速器(实物图)基本调整方法:将在开机前把SPEED设在中间位置,在1200转左右,把STAB设在中间或稍小于中间位置,把增益设在小于¼圈约30-50度位置,调整速度.当速度无法调整了时再将增益调到零度,即可调整速度,此速度可以往上增加,当速度无法调整了时再将增益调大,但不可将增益调到大于STAB.这样反复调,直到HZ 为理想值,若有不稳定现象,微调STAB直稳定.GAC调速器的简单调整方法1,起动前将启动油量设置接近于最大的位置上,启动时间设置中间位置上。
2,增益设置在1/4的位置。
(或小于1/4的位置上)。
3,反时针调整运行速度,因为启动前要将运行速度调低才行。
4,设置完毕后,用跨线闭合调速板G-M端子,目的是启动机组利用怠速来启动,这时启动机组后,首先调整怠速的速度,将怠速调整到1000rpm/min左右的位置最为理想。
5,在调整怠速时要根据情况配合调整燃油量的大小。
6,怠速调整完毕后,断开G-M端子的怠速连接跨线,此时再将机组的运行速度调到额定速度1500rpm/min.7,如机组运行不稳定在调整增益及稳定。
8,再次重新启动机组,有问题再做必要的调整。
9,机组带载测试,如果机组带载速度有所下降,需要再对调速板速度下坡率的调整。
10, 对于冷机也要进行一些次测试才行,有时热机正常冷机不好要反复调整,11, 建议把调速器的怠速G---M端子利用上,闭合G-M可实现怠速功能。
调速板样品如下图:启动前先将运行速度调低,短接GM端子实现怠速,启动后先调好怠速再断开GM端子,再调整运行速度调整到额定。
mcu调速器说明书

mcu调速器说明书一、产品概述MCU调速器是一种基于微控制器单元(MCU)技术的调速器,用于控制电机的转速,广泛应用于工业自动化领域。
本调速器具有高性能、可靠性强、操作简便等特点,可以满足各种复杂环境下的需求。
二、产品特点1.高性能:MCU调速器采用高性能的微控制器单元,具有强大的处理能力和高速运算能力,可以实现精确的转速控制和运动控制。
2.可靠性强:调速器内置多种故障保护机制,如过压保护、过流保护、短路保护等,有效保护电机和调速器的安全运行。
3.操作简便:调速器采用用户友好界面,可以通过触摸屏或按钮进行参数设置,操作简单方便。
4.多种控制方式:调速器支持多种控制方式,包括外部模拟信号控制、PID闭环控制、速度预设控制等,可以满足不同场景下的控制需求。
三、产品参数1.输入电源:AC220V或AC380V,根据实际情况选择。
2.输出电压:根据电机的额定电压设定输出电压。
3.输出电流:根据电机的额定电流设定输出电流。
4.控制方式:支持外部模拟信号控制,输入信号范围为0-10V;支持PID闭环控制,可以设置比例、积分和微分参数;支持速度预设控制,可以设置预设速度。
5.工作温度:-10℃至60℃,在此温度范围内可正常工作。
6.存储温度:-20℃至80℃,在此温度范围内可安全存放。
四、使用方法1.接线:将输入电源和输出电机正确接入调速器的对应接口,确认接线无误后进行下一步操作。
2.参数设置:按下调速器上的设置按钮,进入参数设置界面。
根据电机的额定电压和额定电流,设置输出电压和输出电流的数值;根据控制方式的选择,设置相应的参数,如比例、积分和微分参数。
设置完成后,保存参数并返回主界面。
3.控制方式选择:根据实际需求选择控制方式,如外部模拟信号控制、PID闭环控制或速度预设控制。
通过触摸屏或按钮选择控制方式。
4.运行控制:选择好控制方式后,按下启动按钮,调速器开始运行。
根据控制方式需要,输入相应的控制信号,调速器将根据信号控制电机的转速。
BW(S)T系列微机调速器说明书(定稿版)
BW(S)T系列步进式可编程微机调速器说明书武汉聚能电气有限公司2004年6月目录第一章综合概述.................................................... - 1 -1水轮机调速器简介............................................... - 1 -2微机调速器的发展............................................... - 1 -3调速器分类..................................................... - 1 -4BW(S)T系列步进式微机调速器型号定义.......................... - 1 -5BW(S)T系列步进式微机调速器供货范围.......................... - 1 -第二章BW(S)T系列步进式微机调速器系统构成....................... - 3 -1微机调节器..................................................... - 4 -1.1调节器系统组成及工作原理............................... - 4 -1.2调节器主要功能模块..................................... - 4 -2机械液压系统................................................... - 7 -2.1概述................................................... - 8 -2.1工作原理............................................... - 8 -2.2机械液压系统的主要特点................................. - 8 -2.3主要零部件............................................. - 8 -2.4机械基本参数........................................... - 10 -第三章控制说明.................................................... - 10 -1工况说明...................................................... - 10 -2可编程PLC程序................................................ - 12 -3调速器协联.................................................... - 14 -3.1双调节水轮机的协联概述................................. - 16 -3.2双调节水轮机的协联分类及构成........................... - 16 -3.3数字协联控制........................................... - 16 -4调节控制简介.................................................. - 14 -4.1PID控制................................................. - 14 -第四章主要技术参数及功能特点...................................... - 16 -1主要技术参数.................................................. - 16 -1.1动、静态特性........................................... - 16 -1.2可靠性................................................. - 16 -1.3调节性能及相关性能保证................................. - 16 -1.4主要技术数据........................................... - 16 -2功能特点...................................................... - 16 -2.1综合特点............................................... - 16 -2.2机械特点............................................... - 16 -2.3电气特点............................................... - 16 -第五章步进式微机调速器操作运行................................ - 16 -1机械手动...................................................... - 16 -2电手动运行.................................................... - 16 -3自动运行...................................................... - 16 -第六章安装、调试及维护............................................ - 20 -1调速器的安装.................................................. - 20 -2 调速器的拆装和清洗............................................ - 20 -3 调速器的调试.................................................. - 20 -3.1电-位移转换器反馈的零位调整............................ - 20 -3.2导叶反馈的零位和满度调整............................... - 20 -3.3开、关机时间调整....................................... - 20 -3.4调速器出厂试验:详见出厂试验报告。
调速器的模式

调速器的模式(1)调速器的运行模式冬4-54是DG08800e数字调速单元的挖制面板,左面为调速器控制部分右面为执行机构(ACTUATOR)控制部分,右面的钥匙开关是两部分公用的。
两部分的指示灯和按钮的作用大同小异,下面仅以调速器部分为例加以说明。
控制面板的左上方有六个运行模式(MODE)指示灯,它们分别指示六种不同的运行模式,同--时刻,系统只能在一种模式下工作。
这六种模式的进入,切换方法以及在该模式下系统的主要功能是:①正常(NORMAL)模式“NORMAL”指示灯亮,表示系统在正常模式下工作。
该模式的进入是由备车和各种有效的遥控操纵而自动实现的,假如,主机在备车完成后的停车状态,现在操纵车钟手柄操正车或倒车,系统便自动进入正常模式,调速器控制面板左上方的“NORMAL”指示灯亮。
在这种模式下,主机处在遥控系统的正常控制之中,,并且所有的系统参数和数据都可以利用相应的参数代码进行查询、监视或修改,所有调整后的系统参数都将被存储下来,关掉电源后这些被调整和存储的参数仍保留在存储器中。
②空闲(IDLE)模式空闲(IDLE)模式也可说是运行就绪模式或停车模式,在系统加电后,或系统处在停车状态,或进行启/停逻辑操作的机动操作过程中,或车钟手柄放在停车位置时,系统都会自动进入空闲模式,此时“IDLE”指示灯亮。
在空闲模式下,可以进行参数查询和修改。
③设定值(SETPOINT)模式设定值模式又称直接燃油量控制模式,是一种由车钟手柄发出的车令转速设定信号,既不通过加/减速速率限制等转速设定值限制环节的限制,也不通过调速器的运算和调节,而直接发送到电动执行机构前的选小器,从而实现直接控制主机油门开度的应急操作模式。
这种操作模式比以往的机旁应急操作更加方便、快捷和舒适。
通常在主机遥控系统发生故障时才运行该模式。
【发烧友文献】安卓系统下CPU调速器和IO调度详解(中文说明)
现在很多rom 都有超频内核,很多人不知道内核中的CPU 调速器有什么用下面给大家详细介绍一下CPU 调速器Governor说明说明::什么是Governor?→Android 的CPU 的频率并不是一成不变的的频率并不是一成不变的,,会因应程式所需而调整频率会因应程式所需而调整频率,,通常会视乎CPU Loading%而升而升//降频降频,,在特定时间再检查是否升在特定时间再检查是否升//降。
Governor 就是默认的情景模式。
【ondemand ondemand】按需模式】按需模式】按需模式::→按需调节cpu 频率频率,,不操作手机的时候控制在最低频率不操作手机的时候控制在最低频率,,滑屏或进入应用后会迅速提升至最高频率最高频率,,当空闲时迅速降低频率当空闲时迅速降低频率,,性能较稳定性能较稳定,,但因频率变化幅度过大但因频率变化幅度过大,,省电方面只有一般的水平。
是一种在电池和性能之间趋向平衡的默认模式水平。
是一种在电池和性能之间趋向平衡的默认模式,,但是对于智能手机来说但是对于智能手机来说,ondeman ,ondeman ,ondemandd 在性能表现方面略有欠缺。
【interactive interactive】交互模式】交互模式】交互模式::→和ondemand 相似相似,,规则是规则是““快升慢降快升慢降””,注重响应速度注重响应速度、、性能性能,,当有高需求时迅速跳到高频率频率,,当低需求时逐渐降低频率当低需求时逐渐降低频率,,相比ondemand 费电【conservative conservative】保守模式】保守模式】保守模式::→和ondemand 相似相似,,规则是规则是““慢升快降慢升快降””,注重省电注重省电,,当有高需求时逐渐提高频率当有高需求时逐渐提高频率,,当低需求迅速跳至低频率。
【OndemandX OndemandX】按需】按需X 模式模式::→在Ondemand 基础上改进而来。
微机调速器介绍
三、主要特点(二)
9、PCC的大内存,为智能型调速器提供了资源保证,PCC 的为常规PLC内存的一百余倍。 10、采用数字阀做为电液转换元件。 11、可以适应电站的各种特殊运行方式 13、无杠杆结构。该系列调速器采用了数字阀液压随动 系统,手动无需反馈,因此取消了杠杆,消除了因为 杠杆造成的死区,提高了调速系统的精度,而且无管 路,结构简单,美观。 14、友好的人机界面。采用触摸屏做为人机界面,画面 美观逼真,全中文显示,操作方便,可以同时显示很 多信息。 15、维护简单调试方便。由于PCC的调度集成化和高可靠 性,对于运行维护人员没有太高的特殊要求,调试只 需设定有关数字,没有太多的电位器等可调元件。
微机调速器介绍
YZFT—300/600/1000数字阀 数字阀PCC可 数字阀 可 编程智能调速器
使用地点: 使用地点:福集水电站
一、概述
YZFT—300/600/1000数字阀PCC可编程 智能调速器是将诸多功能集成于可编程 计算机控制器(PCC)内,配以数字阀 随动系统构成的高可靠性的中小型水轮 机调速器。 该调速系统的先导电磁阀具有手动阀及 事故阀的功能,减化了调速器内部结构, 因此该型调速器实现了真正意义上的无 杠杆,无管路,可靠性极高,性能优良, 是水电站提高自动化程度的最理想产品。
电气控制装置图
调 速 器 的 外 形 图
五、结束语
微机调速器是水电站发展应用的方 向,它的最大特点是:运行维护简单、 可靠,特别能保证水电站甩负荷后机组 能稳定到空载,为水电站的安全提供了 可保证。
复习思考题
1、微机速器的结构特点 2、运行特点 3、主要功能
四、调速器的主要功能 (一)
1、通过远方或现场控制,能使水轮发电机组自动运行于: 起动,停机,空载,带负荷等工况,并具有紧急停机 功能。 2、具有手动运行功能,并可实现手动与自动运行的相互 无扰动切换。 3 3、空载运行时,能自动跟踪系统频率,实现快速并网。 4、功率调节模式下,可接受上位机控制指令,实现发电 自动控制功能分 2、机械部分
学习一下安卓cpu调速器与IO调度基本知识

本人一直不明白安卓cpu 和I/O,今日有幸找到,分享给大家一、CPU调速器现在很内核都会增加新的CPU调速器,很多人不知道内核中的CPU调速器有什么用,下面转一个CPU调速器Governor说明:什么是Governor?→Android的CPU 的频率并不是一成不变的,会因应程式所需而调整频率,通常会视乎CPU Loading% 而升/降频,在特定时间再检查是否升/降。
Governor就是默认的情景模式。
【ondemand】按需模式:→按需调节cpu频率,不操作手机的时候控制在最低频率,滑屏或进入应用后会迅速提升至最高频率,当空闲时迅速降低频率,性能较稳定,但因频率变化幅度过大,省电方面只有一般的水平。
是一种在电池和性能之间趋向平衡的默认模式,但是对于智能手机来说,ondemand在性能表现方面略有欠缺。
【interactive】交互模式:→和ondemand相似,规则是“快升慢降”,注重响应速度、性能,当有高需求时迅速跳到高频率,当低需求时逐渐降低频率,相比ondemand费电【conservative】保守模式:→和ondemand相似,规则是“慢升快降”,注重省电,当有高需求时逐渐提高频率,当低需求迅速跳至低频率。
【OndemandX】按需X模式:→在Ondemand基础上改进而来。
关屏时手机进入睡眠状态时,锁定最高频率频率为500Mhz【Scary】胆小模式:→基于Ondemand修改,CPU提升速度比ondemand慢,同时具有smartass的特点【interactiveX】交互X模式:→在interactive基础上改进而来。
关屏时手机进入睡眠状态时,锁定频率为最低值,同时在手机唤醒时能有更好的提升表现。
比interactive更注重保护电池。
【Wheatley】惠特利模式:→规则和Ondemand一样,但是响应速度稍慢,比Ondemand省电【hotplug】热拔插模式:→和ondemand模式差不多,当有高需求时直接跳到最高频率,当需求见效时逐级降低频率,但关屏时就单核低频运行,省电。
PCC调速器使用说明

第一章概述可编程计算机系列水轮机调速器是我所2001年研发的一代新型水轮机调速器,它充分考虑了PLC和IPC两种机型的优点,充分发挥了可编程计算机控制器(PCC)的技术特点,是总结了长控所双微机调速器和全可编程调速器的经验成果而研制的一类新型调速器。
PCC系列调速器适用于大、中、小型混流、转桨、贯流、冲击式等机组。
是长控所大、中型调速器的推荐方案之一。
1.1功能和特点1.1.1本调速器具有如下功能1频率测量与调节:可测量机组和电网的频率,并实现机组频率的调节和控制。
2频率跟踪:当跟踪功能投入时,机组频率自动跟踪电网频率,可实现快速自动同期并网。
3自动调整与分配负荷:机组并入电网,调速器将根据其整定的bp值和电网频差,自动调整机组的出力。
4负荷调整:可接受上位机控制指令,实现发电自动控制功能( A.G.C)。
5开停机操作:接受中控室或上位机指令,实现开停机操作。
6手动操作:具有电手动和机械手动操作功能,并可无条件、无扰动实现自动运行与手动操作的相互切换。
7能采集并显示调速系统的主要参数,如:机组频率、电网频率、导叶开度、调节器输出和调节器的整定参数等。
8有完善的通讯功能,为电站监控系统设置了标准、可靠的接口,能方便地实现与上位机的通讯。
9具有频率计的相关试验功能。
10辅助实验功能:通过操作面板上的功能键和显示屏,可以很方便地完成空载摆动和静态特性测试实验。
1.1.2本调速器的主要特点1可靠性问题PCC调速器的电气部分由PCC控制器、操作显示面板、各功能模块等构成,平均无故障时间可达50万小时即57年,因此具有比PLC调速器更高的可靠性。
2测频问题a测频通道多PCC调速器有四路测频通道,可以用于①机组PT测频、②机组齿盘测频(两路)、③电网频率测量,因此测频容错能力强。
b测频精度高由于一般的微机测频都采用1M计数时钟,而B&R2003系列CPU的内部计数时钟10M左右。
因此,PCC测频精度远比一般的微机测频精度高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
以下是一些收集CPU调速器资料后作出的简单分析,欢迎大家纠错、讨论
CPU调速器(CPU Governors)
调速器决定了手机CPU的工作方式,也可以说是频率自动调整的逻辑,直接关联到手机的性能与功耗
常见的调速器:
Performance
Powersave
Userspace
OndemandOndemandX
Conservative
Interactive
InteractiveX
smartass
Smoothass
SmartassV2
LagFreeBrazilianwax
Intellidemand
Lazy
Lionheart
LionheartX
Luzactive
Savagedzen
Scary
Wheatley
Hotplug
Minmax
Badass
Pegasusq / Pegasusd
MSM-DCVS
详细介绍:
Performance (Always Max)
强制CPU一直运行在最高频率
优点: 良好的性能、速度
缺点: 大功耗,糟糕的电池续航时间,导致手机发热较严重,长期使用会对硬件造成一定的物理损坏
Powersave (Always Min)
强制CPU一直运行在最低频率
优点:最小的功耗,最长的续航时间,最好的发热控制
缺点:糟糕的性能,运行不流畅,有延迟、卡顿
Userspace
用户控制模式,这不是一个预制调速方案的调速器,它允许用户通过非操控内核的方法调节CPU,但是事实在出现"set cpu"这类软件之后就等于废物了
优点:无
缺点:无
Ondemand
按照实际需求快速进行频率调节
优点:基本上实现了平衡,不错的性能兼有不错的续航
缺点:不断地调整CPU频率消耗了一定的电力,导致这只能是一个“理想中”完美的调速器,频率升高时也偏敏感了一些(例如需要500,可能会给你升到650)
Ondemand X
基于Ondemand改进,区分开关屏状态情景
优点:比Ondemand省电
缺点:关屏状态下的频率被锁定在一个特定值某些情况下可能睡死,稳定性不如Ondemand
Conservative
与Interactive相对,保守的调解方案,缓慢地提升频率,迅速地下降频率
优点:比Ondemand稍省电,在真的需要之前不会提高频率
缺点:缓慢地提升频率意味着在打开一些较大的APP或尝试唤醒待机中的机器会较慢
Interactive
与Conservative相对,快速提升频率,缓慢降低频率
优点: 比Ondemand稍强的性能,较快的响应速度
缺点: 在不需要时仍然维持较高的频率,比Ondemand耗电
Interactive X
基于Interactive改进,区分开关屏状态情景
优点:比Interactive省电
缺点:稳定性不如Interactive
Smartass
Interactive与Ondemand合体,理想中的完美品
优点: 比Ondemand更好的性能,比Interactive更好的续航
缺点: 频率下降在不需要时仍然偏慢(虽然比Interactive好),关屏后盲目降频有时导致后台程序(比如同时挂着QQ,微信,微博)工作不正常
Smoothass
优化过的Smartass,快速调节频率平衡续航与性能
优点:理论上比Smartass好的续航
缺点:类似于Smartass,虽然真的比Smartass略好但频率下降在不需要时偏慢仍然存在
SmartassV2
重写的第二代Smartass,添加结合Conservative的一些特性
优点: 在Smartass的基础上更好的性能与省电
缺点: 关屏后的问题仍然没有解决
LagFree
开屏后一下子跳到一个中度偏高频率,然后类似Conservative地工作
优点:算是解决了Conservative的迟钝问题
缺点:电老虎,虽然比Performance省电...
Lazy
偏向Conservative的Ondemand,据说播放影音很好用
优点:在频率提升/下降前都先调到一个特定的值,降低了关屏状态的最大值
缺点:比Ondemand发热稍厉害,执行耗费较多资源的应用时如果进入了关屏状态过久可能会睡死
Brazilianwax
类似SmartassV2,比SmartassV2更积极提高频率
优点:比SmartassV2好的性能
缺点:比SmartassV2差的续航
Intellidemand
以Ondemand为基础,根据GPU状态区分情景
优点:GPU忙时依照Ondmand模式工作,GPU"空转"或中度使用时频率锁定在定值
缺点:执行不太依存GPU运算但较耗费CPU资源的应用时可能会性能不足,GPU“空转”(闲时)不够省电
Lionheart
基于Conservative降低了频率下降的敏感度
优点:比Conservative强的性能
缺点:进入高频率后几乎成了Performance模式
Lionheart X
优化后的Lionherat
优点:结合了一点Smartass的特定,降低功耗
缺点:稳定性不如Lionheart
Luzactive
更偏向Interactive的Smartass,分几个固定的档进行调控
优点:分几个固定的档进行调控,性能功耗比较平衡
缺点:分几个固定的档不够灵活,关屏会设定为最低处理器速度可能导致睡死
Savagedzen
基于SmartassV2编写,比Brazilianwax平衡
优点:比SmartassV2好但比Brazilianwax差的性能,比SmartassV2差但比Brazilianwax好的续航
缺点:稳定性不如Brazilianwax
Scary
基于Ondemand,提速比Ondemand慢
优点:比Ondemand省电
缺点:频率提升慢了有时候会叫人抓狂..
Wheatley
基于Ondemand,提速降速都比Ondemand慢
优点:比Ondemand省电
缺点:频率提升慢了有时引发卡顿,比Scary耗电
Hotplug
基于Ondemand,有性能需求直接最高,没性能需求直接最低
优点:简单粗暴,还算平衡
缺点:性能需求属于中度的情何以堪...
Minmax
基于SmartassV2改进
优点:比SmartassV2好的性能
缺点:比SmartassV2耗电
Badass
只能用于多核CPU,分开控制单个CPU核心
优点:节省资源,耗电和性能较平衡
缺点:对内核要求苛刻,稳定系欠佳
Pegasusq / Pegasusd
源自Samsung Exynos,单独调控单个CPU核心(资料不足)
优点:理论上耗电性能较平衡
缺点:不确定与其他芯片的兼容性,不确定三星芯片发热相对较大是否与此有关
MSM-DCVS
高通Krait核心芯片独有(资料不足)
优点:据说可以用低功率获得高性能
缺点:高通=睾痛(undefined开玩笑的)。