时滞系统的内模控制设计及应用
大时滞过程控制系统及MATLAB仿真
大时滞过程控制系统及MATLAB仿真大时滞过程控制系统是指系统的时滞(Time Delay)较大,也就是系统输入和输出之间存在较长的延迟。
这种系统广泛应用于化工、生物、环境等领域,具有较强的非线性和不确定性。
因此,研究大时滞过程控制系统及其在MATLAB中的仿真对于理论和应用的深入研究具有重要意义。
大时滞过程控制系统的建模和控制是一个复杂的过程。
首先,需要对该系统进行建模,包括确定系统的输入输出关系、非线性特性以及时滞等。
然后,选择合适的控制策略,设计控制器来实现对系统的稳定性、鲁棒性和性能的优化。
最后,通过MATLAB进行仿真验证控制效果。
在大时滞过程控制系统中,常用的控制策略包括PID控制器、模糊控制器和自适应控制器等。
PID控制器是一种经典的控制策略,通过调节比例、积分和微分增益来实现对系统的控制;模糊控制器能够处理非线性和不确定性,通过模糊推理和模糊规则库来实现对系统的控制;自适应控制器则是根据系统的模型和参数实时调整控制器的参数,适应系统的变化。
在MATLAB中,可以利用Simulink工具箱进行大时滞过程控制系统的仿真。
Simulink是一种基于图形化界面的仿真环境,可以通过搭建模型、设置参数和运行仿真来模拟系统的动态行为。
在Simulink中,可以选择适当的模型来构建系统的输入输出关系,通过设置时滞参数和控制策略参数来模拟实际系统的时滞和控制效果。
通过仿真,可以观察系统的响应曲线、稳定性、鲁棒性和性能等指标,验证控制策略的有效性和优化效果。
同时,MATLAB还提供了许多函数和工具箱来支持大时滞过程控制系统的建模和控制。
例如,可以利用Control System Toolbox进行系统建模和控制器设计,利用System Identification Toolbox进行系统辨识,利用Robust Control Toolbox进行鲁棒性分析和控制设计等。
这些工具能够方便地进行系统的分析、优化和验证,为大时滞过程控制系统的研究提供了强大的支持。
基于内模控制的PID控制器在大时滞过程中的应用研究
基于内模控制的PID 控制器在大时滞过程中的应用研究陶睿,肖术骏,王秀,朱学峰(华南理工大学自动化科学与工程学院,广州,510640)摘要:基于内模控制的PID 控制器,只有一个可调参数,且该参数直接与系统的闭环响应速度和回路的鲁棒性有关,克服了常规PID 控制参数整定复杂的缺点,易于为工程技术人员所掌握。
城市供水出水浊度过程是一个大惯性、大时滞、非线性、时变以及随机干扰多的难控对象。
而把IMC-PID 控制器应用在该对象上,仿真结果表明可以取得较理想的控制效果。
关键字:浊度控制; 大时滞过程; 内模控制; PID 控制; 中图分类号:TP273The Study on PID Controller Based on Internal Model Control in the Applications of LargeTime Delay SystemTAO Rui, XIAO Shujun, WANG Xiu, ZHU Xuefeng(S outh China University of Technology, College of Automation Science and Engineering,Guangzhou, Guangdong, 510640)Abstract: PID controller which based on internal model control can set the system using only one adjustable parameter. And the parameter direct related to the response speed of closed loop and the robustness of loop. It is better to conventional PID controller in noise immunity and complexity.The MIC-PID controller can greatly improve the control results and be easy to control by the engineers and technicians. The turbidity control system of municipal water supply system is a non-linear and time-variant process with a large time constant and large dead time ,which is always difficult to control. When adding the MIC-PID controller to it can obtain a better control effect.Key words: Turbidity control; Large time delay system; Internal model control; PID controller;1 引言 在现代工业过程的控制中,PID 控制算法的到了广泛的应用。
大时滞过程控制方法及应用分析
大时滞过程控制方法及应用分析诸葛晓春南宁化工股份有限公司,广西南宁530001摘要:本文对常用控制方法中的PID控制、Smith预估控制、Dahlin控制以及现代控制方法中的内膜控制、预测控制等各种控制方法及特点进行介绍,并对大时滞过程控制方法的应用进行分析。
关键词:大时滞;控制方法;应用分析时滞是工业生产中常见的现象。
存在时滞,意味着系统的扰动不能及时地在控制作用上得到反映,而是延迟一段时间后才在对象输出上反映出来。
因此,选择适当的控制方法,能有效控制时滞系统,保证工业生产的安全可靠性。
1.经典控制方法1.1Smith预估控制Smith预估控制方法是由瑞典科学家Smith提出的,它的基本控制思路是预估出系统在扰动状态下的特征,再通过构建函数,以向内反馈的形式,使常规控制器的时滞得到补偿,达到控制作用超前反映在对象输出上的目的。
从理论上讲,Smith预估控制法可以避免时滞现象带来的影响,然而在实际的实践中却大相径庭。
被控制对象的精确的数学模型是Smith预估控制器得以实现的基础,因此,当数学模型与控制对象存在偏差时,控制器便达不到预期的控制效果,甚至还有恶化的可能。
1.2Dahlin控制Dahlin控制是由Dahlin在1968年提出的一种数字控制方法,它主要是针对大纯滞后系统,即对当纯滞后时间τ与对象时间常数T之比(τ/T),大于0.5甚或超过1.0时的对象进行控制。
它的基本思路是使得闭环系统等效为一个一阶惯性环节加纯滞后环节,并期望整个闭环系统的纯滞后时间和被控对象的纯滞后时间相同。
Dahlin算法方法比较简单,只要根据传递函数设计出合适的且可以实现的数字调节器,就能够有效地克服纯滞后的不利影响。
但采用Dahlin控制会出现振铃现象,即闭环系统的输出以指数形式较快地趋向稳态值,而数字控制器的输出则以二分之一的采样频率大幅度的衰减震荡。
这样一来,会造成执行机构大幅度的摆动,加剧磨损,甚至引起系统的稳定性下降。
时滞系统几种控制策略研究
时滞系统几种控制策略研究时滞系统几种控制策略研究时滞系统是一类在实际控制中常见的系统,其特点是系统状态变量在对应的输出值上受到时间延迟的影响。
时滞系统在工程领域广泛应用,例如飞行器、机器人等。
然而,由于时滞的存在,时滞系统往往容易出现不稳定、震荡和性能下降的问题,因此如何有效地控制时滞系统,降低时滞对系统性能的影响成为了一个重要的研究方向。
针对时滞系统的控制策略研究,主要包括经典控制方法、自适应控制方法和智能控制方法等。
经典控制方法中,最常用的是PID控制器。
PID控制器是一种基于比例、积分、微分控制的经典控制策略,它能够对系统的误差进行调节。
然而,对于时滞系统,传统PID控制器存在不足之处,因为时滞会导致控制信号滞后,从而影响系统的稳定性。
因此,需要对PID控制器进行改进,使其能够对时滞系统进行有效的控制。
自适应控制方法通过根据系统的特性实时调整控制器的参数,从而适应系统的变化。
其中,模型参考自适应控制(Model Reference Adaptive Control, MRAC)是一种常用的方法。
MRAC通过在线估计系统的模型,并根据估计的模型来调整控制器的参数,从而实现对时滞系统的控制。
此外,自适应滑模控制(Adaptive Sliding Mode Control, ASMC)也是一种常用的控制方法。
ASMC通过引入滑模面,并根据系统误差的变化调整滑模面的位置,以降低时滞对系统的影响。
智能控制方法中,模糊控制和神经网络控制是常见的策略。
模糊控制是一种基于模糊逻辑推理的控制方法,通过将人类的经验和知识转化为模糊规则,来对系统进行控制。
神经网络控制是一种通过训练神经网络来实现对系统的控制的方法,神经网络可以学习系统的非线性映射关系,并通过适当的训练来调整权值,从而实现对时滞系统的控制。
在实际应用中,不同的控制策略可以结合使用,以实现更好的控制效果。
例如,可以将PID控制器和模糊控制器结合,利用PID控制器对系统进行粗略调节,再利用模糊控制器进行微调,从而达到更好的控制效果。
一阶线性时滞系统的内模控制设计
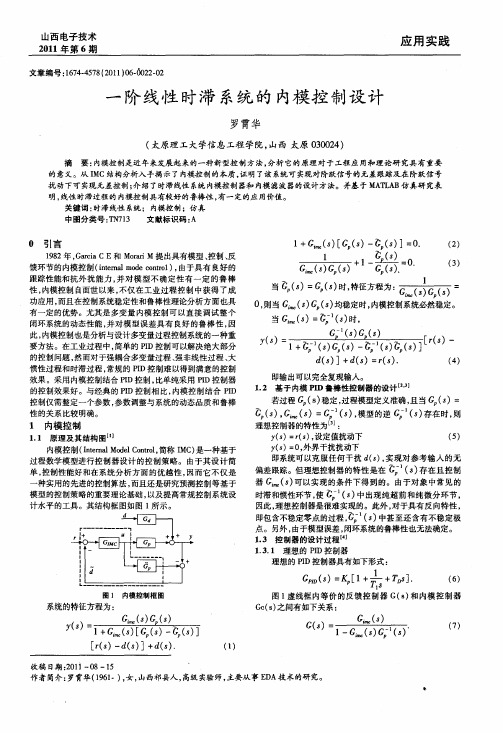
1 G s[ () G() = . + () s 一 psJ 0
() 2
南 一 ㈤ 丽 ¨葡 - 【 o 3 ・ ) -
当 ( ( 时特 方 为 : 1 s ) s ,征 程 : )
0则当 G s () , () s均稳定时, 内模控制系统必然稳定。 当 G ()= s
关键词 : 时滞线性 系统 ;内模控制 ;仿真 中图分类号 :N 1 文献标识码 : T 73 A
0 引言
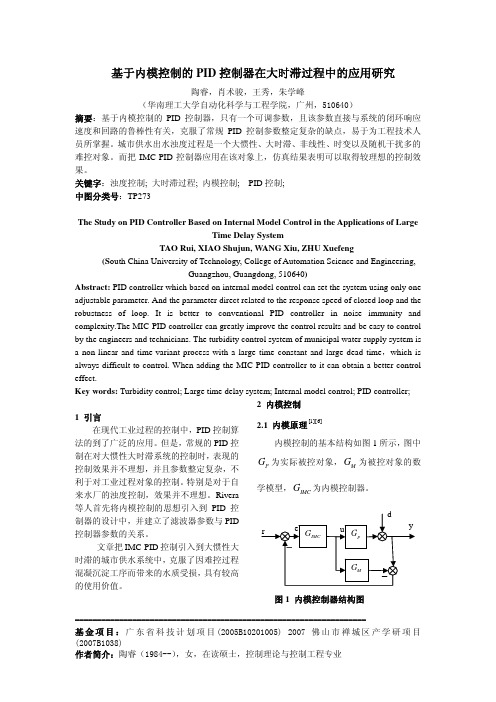
18 9 2年 , a i CE和 Moa Gra c rrM提 出具有模型 、 i 控制 、 反 馈环节的内模控制(ne l d ot 1 , i ma moecn o ) 由于 具有 良好 的 t r 跟踪性能和抗外 扰能力 , 对模 型不 确定性 有一 定 的鲁棒 并 性, 内模控制 自面世 以来 , 不仅在 工业过程 控制 中获得 了成 功应用 , 而且在控制系统稳定性 和鲁棒性理论分析方面 也具 有一定的优势。尤其 是多变量 内模 控制可 以直接 调试整个 闭环系统的动态性能 , 并对 模型误差 具有 良好 的鲁棒 性 , 因 此, 内模控制也是分析与设 计多变量 过程控制 系统的一 种重 要方法。在工业过程中 , 简单的 PD控制可以解决绝大部 分 I 的控制问题 , 然而对于强耦合多变量过程 、 强非线性过程 、 大 惯性过程和时滞过程 , 常规的 PD控制难 以得到满意的控制 I 效果 。采用内模控制结合 PD控制 , I 比单纯采用 PD控 制器 I 的控制效果好。与经典的 PD控制 相 比, I 内模控 制结合 PD I 控制仅需整定一个参数 , 参数调整与系统的动态 品质 和鲁棒 性的关系 比较明确。
G ̄ s [ + + s . e ()= 1 ]
』1
一阶时滞系统内模控制的优化分析
一阶时滞系统内模控制的优化分析詹庄春【摘要】Based on the IMC -PID principle , by using the practical PID model , the combination of theoretical calculation and practical engineering was realized .Through the different degree of first order delay system param-eter setting , the value range of lambda is determined .By utilizing the NCD , a large amount of calculation can be performed , which provides an effective way for the parameter optimization .By giving a concrete example , the system showed good control performance .And after a general analysis , the general rule of the internal model control was obtained , which provides a reference to engineering design .%基于IMC-PID原理,采取实际应用的PID模型,实现了理论算式与工程实际的结合。
对不同时滞程度的一阶系统进行参数整定,确定了λ的取值范围。
利用NCD解决了大量计算问题,为参数优化提供了有效途径。
通过设计举例,显示出系统具有良好的控制性能。
再经过一般性分析,得出了内模控制的一般规律,以供工程设计参考。
【期刊名称】《安徽理工大学学报(自然科学版)》【年(卷),期】2016(036)001【总页数】5页(P70-74)【关键词】一阶时滞;IMC-PID;NCD;参数整定【作者】詹庄春【作者单位】华南农业大学珠江学院,广东广州 510900【正文语种】中文【中图分类】TP214一阶时滞系统普遍存在于过程控制当中,对于时滞程度较大的系统,单纯采用经典PID控制,其参数很难整定;最经典的控制方式有Simth预估控制法,但该方法对模型误差和滞后时间较敏感,而系统的动态过程和干扰使被控对象的实际模型很难精确。
时滞系统的内模控制设计及应用
Ke Vaue = 1; y l
} e ei K y D oe < 38 l s f( eA C d 8) {
Ke Vaue = 2; y l
}
e ei( eA C d < 18 l K y D oe s f 2)
{
Ke Vaue = 3; y l
} es e Vau = 4 le K y le 口应用 实例 口
下的按键键 值 。图中 电容 C 1用 于消 除抖 动 和干扰 信 号 J 。 用该方法对键盘状态进行扫描成本低 、 电路布线简单 。
{
Dea m (0 ; / 时 ly s 1 ) / 延
_
仪器 仪表用户
1m 0 s的消抖处理
3 软件 设计
用该方法扫描识别 按键过程 中 , 软件设 计显得尤 为重要 , 在电阻阻值精确 的条件 下 , 按键 动作产 生 的电压 变化范 围 对 的判断应非 常准确 , 否则 会 引起扫描 出错 。在 综合 考虑扫 描 精度和单 片机 IO口保 护 的情 况下 , / 选定 R 0为 1 Q。R 、 0k 1 R 、 3等的阻值由按键数量决定 。 2R 程 宁 运行 时 , 首先 将 A C I 的 电 压 值 转 换 为 数 字 量 , 后 D 0弓 脚 然 将其与特定 范 围值 进行 比较 , 即可 得 出所 按按 键 的键 值。考 虑到电阻阻值及 A D转换的误 差 , / 程序 中的最大 A D转 换码 / 值应 比 12 04稍小 , 以增强系统的稳定性和准确性 。 采用 C语 言编写的 A D转 换码获取 函数和键值获取 函数 / 如下 , 主程序 中可随需要进行调 用 , 在 经实 际测试 , 效果 良好 , 按 键 扫 描 准 确无 误 。 us ndit eA C d ( ni e hr D 0 / 获取 A D转换 ni e tD o e u s dc a A C ) / g nG n g / 码 函数
高阶时滞工业系统的自适应内模控制
Design of Adaptive Internal M odel Controller for the H igh-O rder Industrial System s with Tim e Delay
LIU Si—jie ,WANG Kai—yang ,YIN Er—xin
(1.Huadian Electric Power Research Institute,Hangzhou Zhejiang 310030,China;
2 高 阶 时滞 系ቤተ መጻሕፍቲ ባይዱ 自适应 内模 控制 器设 计
本文提 出的高阶时滞系统 自适应 内模 控制器 ,是基 于不 同工况 数学模 型的模 型参数 ,应 用最 优线 性拟合 的方 式 ,以
1 引 言 对于大 多数工 业 对象 而 言 ,由于被 控 对 象 常具 有 纯 迟
延 、大惯 性 、变模 型 等复 杂特 性 ,常 规 PID控 制器 控 制效 果 较差 。内模控制 …作 为一 种先 进控 制理 论 ,对迟 延大 、惯 性 大的被控对象具 有较 好 的控 制效 果 ,但该 控 制方 式对 被 控 对象模型 的依赖 程度较 大 ,当被控 对象 模型发 生 变化 时 ,控 制效果变差 ,甚至 出现 系统不 稳定 的状 况 ,为 了保证 系统 的 稳定性 ,不得不加入 带有 较大 时 间常数 的滤 波环 节 ,这又 使 得系统 的动 态特性变 差 ,系统 输 出无法 及时 跟踪 系统输 入 。 为解决上述 问题 ,有学 者提出了一种滤 波器参数 自适应 的 内 模控制器 j,该控制方法将 带有较大纯迟延 的一 阶对象 的 内 模控制 器 ,经过数 学推 导 ,等效 变换 为 以滤波 器参数 为 变量 的 PI控制器 ,再应用模糊控制 对滤波器 时 间常数进 行修改 , 实现 了变滤波 器参 数 的 内模 控 制 ,但 对于 一般 工 业 过程 而 言 ,为了获得较高 的模 型精度 ,较难 应用 一 阶系统作 为 预估
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定义 IM C 控制器为, GIM C ( s) = G~ -P 1 ( s ) f ( s),
其中: f =
1 (1+
器, 为滤波器常数, 是内模控制仅有
的设计参数; 指数 n应选择得足够大, 以保证 GIM C 是可以实现的。 由图 1得反馈控制器与内模控制器 的关系:
作者简介: 罗耿 ( 1981 - ), 男, 工程师, 主要研究方向: 检测技术与自动 化装置。 收稿日期: 2008- 06- 21( 8275)
文章编号: 1671- 1041( 2008) 06- 0060- 03
时滞系统的内模控制设计及应用
卢丽丽, 金秀章, 李向菊, 郭会霞
(华北电力大学 控制科学与控制工程学院, 保定 071003)
内模控制器的设 计通常采用以下步骤 [ 3] :
( 1) 模型分解
G~ P ( s ) = G~ P + ( s ) G~ P- ( s) 式中, G~ P+ ( s) 包含所有的时滞和右半平面零点 。G~ P- ( s) 是 具有最小相位特征的 传递函数。 ( 2) IM C控制器设计
在设计控制器时 , 需在最小相位 的G~ P- ( s) 上增加滤波 器, 以确保系统的稳定性 和鲁棒性。
得一阶加滞后过程的一 阶 P ade近似的 IM C-P ID 控制器参数整
定公式如下:
Tf = 2(
+
), KC =
2 K
+ (
T+
Tf ),
Ti =
2 + T - Tf, Td =
2(
2
T
- Tf
+ T - Tf )
( 6)
3. 2 二阶加滞后过程的 IM C - PID 控制器设计
二阶加滞后时间过程形如:
K ey w ords: interna lm ode l contro;l IMC-P ID; delay tmi e control system; f irst order Pade approxmi ation
60 E IC Vo.l 15 2008 No. 6
欢迎光临本刊网站 h ttp: / /www. e ic. com. cn
计算出反馈控制器, 然后 将反 馈控 制器 转化 成传 统的 P ID 结
构, 就得到 了基 于内 模控制 的 P ID 控 制器
IM C-P ID 控制
器。现对纯滞后采用一阶 Pade近似, 从而对一阶和二阶加纯滞
后过程导出了只需整定一个参数 的 IM C-P ID 控制器。
3. 1 一阶加滞后过程的 IM C - P ID 控制器设计
一阶加滞后时间过程形如: G~ P ( s) ,
=
K Ts +
1e- s,
1- s
对 e- s 采用一阶 P ade近似 e- s =
2,
( 2)
1+ 2 s
则内模控制器
GIM C ( s )
=
K
T (
s+ s+
1 1
, )
( 3)
反馈控制器 GC ( s) =
Ts + 1
K ( s + 1) ( 1 -
递函数; G~ P是过程模型的传递函数; Gd 是 扰动通道 传递函 数, GIM C 是内模控制器, GC 是反馈控制器。
图 1 内模控制结构框图 2. 2 内模控制的主要性质
内模控制具有下 述 3个基本性质:
性质 1: 对偶 稳定性。当模型匹配时, 内模控制系 统的闭环 稳定性取决于前向通 道各个传递函数的稳定性。
e- s
, )
( 4)
s+ 1
而实际反馈控制器 GC ( P ID ) 可采用以下形式:
GC ( PID )
=
KC
(
1+
1 Tis
+
Tds Tf s +
1),
( 5)
式 ( 5) 中: KC、T i 和 Td 分别为控制器的放 大倍数、积分时
间和微分时间, Tf 取 T d 的某一倍数。
将式 ( 2) 代入式 ( 4) , 作必要简化处理后与式 ( 5) 比较, 可
{ K eyV a lue = 3; } else K eyV a lue = 4; } return K eyV a lue; }
4 结束语
本文所采用 的按 键扫 描识 别方 案性 能稳 定, 在需 要 时还 可对其进行扩展, 但经实验测试, 还存在不 足之处, 在按键数量 达到三十个以上时, 会出现准确性降低的现象。主要原因是由 电阻值误差引起, 因 此在 实 际应 用中 应尽 量选 用高 精度 的电 阻, 同时按键数量保持在 30个以下。
采用 C语言编写的 A /D 转换 码获取函数和键值获取函数 如下, 在主程 序中可随 需要进行调 用, 经 实际测试, 效果良 好, 按键扫描准确无误。 uns igned int G etADCode( unsigned char ADC0) / /获取 A /D 转换 码函数
{ uns igned char ;i
ADCSRA | = ( 1 < < AD IF ); / /清除标志位 ADCode = ADCode + ADC; }
re turn ADCode; } uns igned char G etK eyV alue( vo id) / /获取键 值函数 {
unsigned cha r K eyV alue = N okey; / /键值变量 unsigned int K eyADCode = 0; / /按键 ADC 码变量 K eyADCode = G etADCode( ADC _0); if ( K eyADCode < 995) / /有按键被按下 时
应用实 例
下的按键键 值。 图中 电 容 C1 用 于消 除 抖动 和 干 扰信 号 [ 3] 。 用该方法对键盘状态 进行扫描成本低、电路布线简单。
3 软件设计
用该方法扫描识 别按键过 程中, 软件设 计显得 尤为重 要, 在电阻阻值精确 的条 件下 , 对按 键动 作产 生的 电压 变化 范围 的判断应非 常准 确, 否则 会引 起扫 描出 错。在 综合 考虑 扫描 精度 和单片 机 I /O 口保 护的情 况下, 选 定 R 0 为 10 k 。 R 1、 R 2、R 3等的阻值由按键数量决定。 程序运行时, 首先将 ADC0引 脚的 电压值 转换 为数字 量, 然后 将其与特定 范围 值进 行比 较, 即可 得出 所按 按键 的键 值。考 虑到电阻阻值及 A /D 转换的 误差, 程 序中的 最大 A /D 转换码 值应比 1024稍小, 以增强系统的稳定性和准确性。
参考文献
[ 1 ] 丁化成, 耿德根, 李君凯. AVR 单片机应用设计. 北京: 北京航 空航天大学出版社, 2002.
[ 2 ] 马潮. A VR 单片机嵌入 式系统 原理与 应用实 践. 北京: 北京 航空航天大学出版社, 2007.
[ 3 ] 刘宗曦. 串联式键盘原理与应用. 辽宁 师范学院学报, 2003, 5 ( 4 ) : 83- 85.
uns igned int ADCode = 0; ADM UX = _BV ( REFS0) | ADC0; / /设置参考电压 for ( i= 0; i< 4; i+ + ) {
ADCSRA | = ( 1 < ADCSRA | = ( 1 < adc _ isr ( vo id) ); / /等待 ADC转换结束中断
G~ P + ( s)
=
K
e- s,
(T1s + 1) (T2s + 1)
按上述 步 骤 可得, 二 阶 加 滞后 过 程的 一 阶 P ade 近似 的
仪器仪表用户
{ D elay_m s( 10); / /延时 10ms的消抖处理 K eyADCode = G etADCode( ADC _0) ; if ( K eyA DCode < 683) / /获取键值 { K eyV a lue = 1; } else if ( K eyADCode < 388) { K eyV a lue = 2; } else if ( K eyADCode < 128)
关键词: 内模控制; IM C-PID; 时滞系统; 一阶 Pade近似 中图分类号: TP273 文献标识码: B
The design and application of in ternalm odel con trol to tim e delay con trol system
LU L -i l,i JI N X iu-zhang, L I X iang- ju, GUO H u -i xia
GC ( s ) =
GIM C ( s) 1 - GIM C ( s) G~ P+ ( s)
( 1)
欢迎订阅 欢迎撰稿 欢迎发布产品广告信息
应用实例
3 基于 IM C 的 P ID 控制器设计
R ive ra等首先提 出了 IM C-P ID 控制 器的设 计问题 [ 4、5] 。先
按照内模控制器设计的两步法 设计出内模 控制器, 再按 式 ( 1)
摘要: 基于内模控制理论, 针对时滞控制系统的纯滞后 环节, 采用一阶 Pade近 似, 设计了 结构简单, 且只有一 个参数需 要整定的 IM C-PID 控 制器。结果表明: 该控制器可获得相当于 内模控制 器良好的 控制性能 和鲁棒性, 又可充 分利用成熟的 P ID 控制 器, 因而 具有良好的位置 跟随 特性。
性质 2: 理 想 控 制 器 特 性。若 过程 稳 定 且 模 型 匹 确, 且