线性矩阵不等式及其在控制工程中的应用
用线性矩阵不等式方法求解控制理论问题_张怡
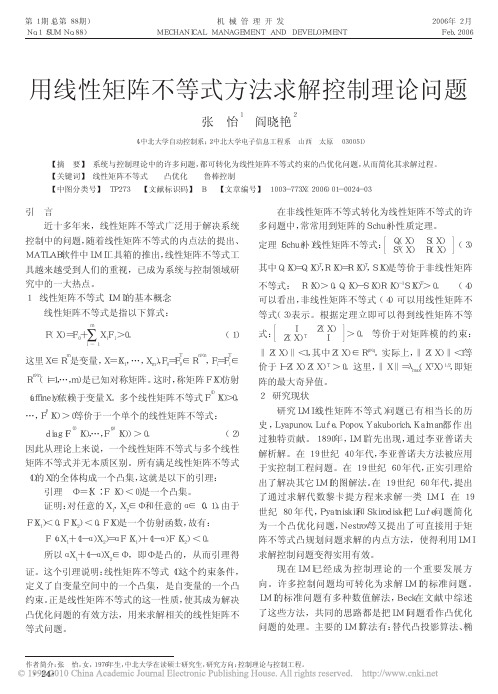
(a)包覆不完全
(b)形成间隙
图 1 粘结剂对炸药的润湿状况
(2)对于水悬浮法,造粒过程有水存在,此时发生 自动铺展的条件为:△G= γEB+ γBW- γEW< 0。 式中:γEB、γBW、γEW 分别为炸药- 粘结剂、粘结剂- 水、炸 药- 水界面张力。如果粘结剂满足在空气中能够完全 润湿炸药的条件,则上式可整理为:
- 1/2 - 1/2
其中,λmax (X,Y) 表示矩阵Y XY 的最大特征值。
GEVP是半凸(quasiconvex) 优化问题。
-1
(4)凸问题 (CP):minlodet A(X) , s.t A(X) > 0,
B(X) > 0。
(9)
这里A、B是仿射依赖于变量X的对称矩阵,注意当A>0
-1
等式问题。
在非线性矩阵不等式转化为线性矩阵不等式的许
多问题中,常常用到矩阵的Schur补性质定理。
# $ 定理(Schur补)线性矩阵不等式:
Q(X) S(T X)
S(X) R(X)
(3)
其中Q(X)=Q(X)T,R(X)=R(X)T,S(X)是等价于非线性矩阵
不等式: R(X) > 0,Q(X)- S(X)R(X)-1S(X)T> 0。 (4)
该步骤,直至收敛到问题的最优解。该算法虽简单,但
ห้องสมุดไป่ตู้
效率不高,仅适用于较小规模问题。
1988年,Nesterov和Nemirovskii提出了内点法,用
来求解具有线性矩阵不等式约束的凸优化问题,取得
了良好的效果。其基本思想是:运用约束集定义一个
凸的障碍函数,将其附加到原问题的目标函数中,以
一个无约束优化问题代替原有的约束优化问题,运用
控制系统中的鲁棒性分析与设计
控制系统中的鲁棒性分析与设计在控制系统中,鲁棒性是指控制系统对于参数变化、外部干扰、测量噪声等不确定性因素的稳定性和性能表现。
鲁棒性分析与设计主要目的是提高控制系统的稳定性、鲁棒性和性能,以适应实际工程环境中的不确定性。
1. 鲁棒性分析鲁棒性分析是控制系统设计的重要环节。
它可以帮助工程师评估以及量化控制系统对于参数变化、干扰和噪声的容忍程度。
以下是一些常用的鲁棒性分析方法:1.1 系统感度函数分析系统感度函数是用来描述控制系统输出对于参数变化的敏感程度。
通过分析系统感度函数,可以确定系统的脆弱性和稳定性。
系统感度函数分析常用于评估系统的稳定性边界、参数不确定性边界和鲁棒性边界。
1.2 线性矩阵不等式(LMI)方法线性矩阵不等式方法是一种基于数学理论的鲁棒性分析方法。
它通过建立一系列矩阵不等式,来刻画控制系统的稳定性和性能。
LMI方法在控制系统设计中被广泛应用,它不仅可以评估系统的鲁棒性,还可以用于设计鲁棒控制器。
1.3 干扰分析干扰是控制系统中常见的不确定因素,对系统的性能和稳定性产生重要影响。
干扰分析可以帮助工程师了解系统对于不同干扰的响应,并根据需要采取相应的措施来改进系统鲁棒性。
常用的干扰分析方法包括频域分析、时域分析和能量分析等。
2. 鲁棒性设计鲁棒性设计旨在采取控制策略和控制器结构,使得控制系统对于不确定性因素具有较好的稳定性和性能。
以下是一些常见的鲁棒性设计方法:2.1 鲁棒控制器设计鲁棒控制器设计是指根据鲁棒性需求,设计出满足控制系统鲁棒性要求的控制器。
常用的鲁棒控制器设计方法包括H∞控制、μ合成、鲁棒PID控制等。
这些方法都是基于数学理论,可用于设计满足鲁棒性和性能要求的控制器。
2.2 鲁棒优化设计鲁棒优化设计是指结合鲁棒控制与优化方法,兼顾控制系统的稳定性和性能。
通过优化设计,可以在满足鲁棒性要求的前提下,使系统的性能指标达到最优。
鲁棒优化设计方法包括H∞优化、线性二次调节器和状态反馈等。
线性矩阵不等式及其在随机控制中的应用
Ab t a t A n r a e rfr ltd a o v x叩 一 s r c : u e o t t o lmsf m t h si c n ml h o y c n b omuae sc n e O i a p r h o c t e
W ANG i g Z P n , HANG e g li Ch n —e
(col f l t n f m t nadC no E g er gSadn steo Igt nut ,nn205 ,h a Sho oEe r i I o ao n ot l ni en ,hnog ntu fjh IdsyJ a 533 C i ) co cn r i r n i I it r i n
文章编号 :04 4 8 (07 0 —0 1 —0 10 — 2020 ) 1 08 3
线 性 矩 阵不等 式及 其在 随机 控 制 中的应 用
王 平, 张成 磊
( 山东轻工业学 院 电子信息与控制工程学院 , …东 济南 205 ) 533
摘要 : 随机控制理论 中许多重要的问题 , 都可转化为线性矩阵不等式 (M ) L I约束 的凸优化 问题 , 而使其在数值 上 从 易于求解 。本文阐述 了线性矩阵不等式 方法的基本概念和内容 , 并介绍 了有关算法 及计算 软件 , 举例说 明其 最后
问题本 身是有 解 的 , 找 不 出问 题 的解 。这 给 实 际 也
() 1的决策变 量 。 F
已知的实对称阵。显然 F ) ( 是变量 各元素的仿
射 函数 , 外 式 () 味着 F( 是 一 个 负定 矩 阵 , 另 1意 ) 即对 所有 的非零 向量 H , ( u< ∈ u’ ) 0或 F( F ) 的最 大特 征 值 小 于 零 。所 有 满 足 线 性 矩 阵 不 等 式
线性矩阵不等式及其在控制系统中的应用
线性矩阵不等式及其在控制系统中的应用
何军红;吴旭光;穆向阳
【期刊名称】《系统工程与电子技术》
【年(卷),期】2001(023)010
【摘要】详细综述了LMI在控制系统中的发展现状和应用,主要涉及了不确定系统的鲁棒性能和鲁棒稳定性、不确定系统的鲁棒控制器设计、LMI在时滞系统中的应用及存在的问题、不确定系统的鲁棒滤波应用状况、不确定系统的模型验证应用等,并分析了基于LMI方法的变结构控制、极点配置、模糊控制等其它相关内容.给出了上述控制问题的LMI描述及相关求解方法,最后并指出了LMI进一步的应用研究方向.
【总页数】7页(P25-30,110)
【作者】何军红;吴旭光;穆向阳
【作者单位】中国航天科工集团二院210所;西北工业大学航海学院;西安石油学院【正文语种】中文
【中图分类】TP272
【相关文献】
1.线性矩阵不等式在冷却水温度控制系统中的应用 [J], 盛安冬;赵兰姝;吕太全;张萍萍
2.线性矩阵不等式及其在随机控制中的应用 [J], 王平;张成磊
3.线性矩阵不等式在鲁棒稳定性分析中的应用 [J], 许晶;隋晶;安学文
4.线性矩阵不等式工具箱在控制论仿真中的应用 [J], 孙桂芝
5.线性矩阵不等式及其在细胞神经网络保性能控制中的应用 [J], 江梅;何汉林因版权原因,仅展示原文概要,查看原文内容请购买。
LMI线性矩阵不等式
线性矩阵不等式
Linear matrix inequality(LMI): 矩阵变量集合中线性(或仿
射)的矩阵不等式.
1.1: LMI的 基 本 性 质
1
Q正定:如果 xT Qx > 0, ∀x ̸= 0 Q半正定:如果 xT Qx ≥ 0, ∀x ̸= 0 P 负定(半负定):如果Q = −P 正定(半正定)。
9
%可行 ( 是稳定的A) tmin
当且仅当 tmin <0
运行结果:
Lyap =
1
S o l v e r f o r LMI f e a s i b i l i t y problems L ( x ) < R( x )
10
T h i s s o l v e r minimizes
t
subject to
只需要写出对角线上面,或下面的项。
% AP+PA’ <0 % 0 % P>0
l m i t e r m ( [ Lyap 1 1 P ] , 1 , A , ’ s ’ ) ; l m i t e r m ( [ Lyap 1 2 0 ] , 0 ) ; l m i t e r m ( [ Lyap 2 2 P] ,1 , − 1) ; LMIsys= g e t l m i s ; [ tmin , x f e a s ] = feasp ( LMIsys ) ;
L ( x ) < R( x ) + t ∗ I
The b e s t v a l u e o f t should be n e g a t i v e f o r f e a s i b i l i t y
控制论常用的矩阵不等式

控制论常用的矩阵不等式控制论是一门研究如何通过控制手段来实现系统稳定、优化和鲁棒性的学科,而矩阵不等式则是控制论中常用的数学工具之一。
本文将介绍控制论中常用的几种矩阵不等式,并讨论其在控制系统设计中的应用。
1. 线性矩阵不等式(LMI)线性矩阵不等式是控制论中最常用的矩阵不等式之一。
它的形式为:$$A(x)X+B(x)Y+C^{T}(x)YC(x)<0$$其中,$A(x)$、$B(x)$、$C(x)$均为实系数矩阵函数,$X$、$Y$均为矩阵变量。
该不等式表示的是矩阵函数$A(x)$、$B(x)$、$C(x)$构成的线性系统对应的闭环系统是渐进稳定的,即对任意的初值$x_0$,系统的输出$y(t)$都会收敛到零。
2. Lyapunov矩阵不等式Lyapunov矩阵不等式是控制论中另一种常用的矩阵不等式。
它的形式为:$$A^{T}P+PA<-Q$$其中,$A$为系统的状态转移矩阵,$P$为对称正定矩阵,$Q$为对称正定矩阵。
该不等式表示的是系统的Lyapunov函数$V(x)=x^{T}Px$满足$V(x)leqslant-alpha x^{T}x$,其中$alpha$是正常数。
3. Riccati矩阵不等式Riccati矩阵不等式也是控制论中常用的矩阵不等式之一。
它的形式为:$$A^{T}P+PA-PBR^{-1}B^{T}P<-Q$$其中,$A$、$B$为系统的状态转移矩阵和输入矩阵,$P$为对称正定矩阵,$R$为对称正定矩阵。
该不等式表示的是系统的最优控制输入满足线性方程$u=-R^{-1}B^{T}Px$。
4. Schur矩阵不等式Schur矩阵不等式是控制论中最基本的矩阵不等式之一。
它的形式为:$$Mprec N$$其中,$M$、$N$为两个对称矩阵,$prec$表示矩阵的部分序。
该不等式表示的是矩阵$N-M$是正定的。
总之,矩阵不等式在控制论中具有广泛的应用,可以用于系统稳定性分析、最优控制设计和鲁棒性分析等领域。
基于线性矩阵不等式的结构摄动系统H∞鲁棒控制

基于线性矩阵不等式的结构摄动系统H∞鲁棒控制
基于线性矩阵不等式的结构摄动系统H∞鲁棒控制
研究具有结构摄动系统的鲁棒H∞动态输出反馈控制问题.结构摄动系统的二次稳定解等价于辅助线性时不变系统H∞标准设计问题的解.基于线性矩阵不等式(LMI)方法,给出了用3个线性矩阵不等式表征的这一问题的可解条件.通过求解3个线性矩阵不等式便可获得鲁棒控制解.该方法应用于某型双转子涡喷发动机稳态控制器的设计,取得了预期的效果.
作者:谢光华曾庆福 Xie Guanghua Zeng Qingfu 作者单位:西北工业大学数据处理中心,西安,710072 刊名:推进技术ISTIC EI PKU英文刊名:JOURNAL OF PROPULSION TECHNOLOGY 年,卷(期):1999 20(4) 分类号:V233.7 关键词:航空发动机控制系统动态控制鲁棒控制。
性矩阵不等式及在控制理论中的应用

3 期 张家凡 ,郑 晓 ,胡志刚 : 线性矩阵不等式及在控制理论中的应用
57
algorit hm) [ 13 ] ; 还有功能与 Matlab 类似的免费软件 Scilab ( 该软件可以从其网页 http :/ / www - rocq. inria. f r/ scilab 上下载) ,其采用一种原 - 对偶内点法 (primal - dual interior - point algorit hm) 。 这二种软
m
) y ) = F0 + F (λ x + (1 - λ
i =1
∑(λx
i i
i
+ (1 -
λ ) y i ) Fi
m
) F0 + λ = λF0 + ( 1 - λ
m
j =1
∑x F
) + (1 - λ
i =1
∑y F
i
i
) F ( y ) > 0 证毕 。 = λF ( x ) + ( 1 - λ
x 的仿射函数 。 这是一个准凸 ( quasiconvex) 问题
[6 ]
1 . 2 . 2 性质 ( 2) 有限个 L M I 凸集的交集也是凸
集 , 并可以等价地用一个 L M I 表示 。 以两 个 L M I 凸 集 为 例 说 明 。 设 F( x) > 0 ,
G ( x ) > 0 , 它们的交集表示为{ x | F ( x ) > 0 } ∩ { x | G ( x ) > 0 } , 它可等价地由单个 L M I 表示 , 即 x: F( x) O O G( x)
56
武 汉 工 业 学 院 学 报 2002 年
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 线性矩阵不等式的介绍
一个线性矩阵不等式具有如下形式 :
F ( x) = F0 + x 1 F1 + … + x m Fm < 0 (1)
式中 , x 1 , …, x m 是 m 个实数变量 ,称为是线性矩
阵不等式 (1) 的决策变量 , x = ( x 1 , …, x m ) T ∈
Rm 是由决策变量构成的向量 , 称为决策向量 。Fi
摘 要 : 介绍了线性矩阵不等式的基本概念和用于求解线性矩阵不等式的软件工具 箱 Matlablmi 的 3 个求解器 ,对线性矩阵不等式在控制系统中的应用作了详细的综述 。分 析了其在当前的两个研究热点 ,即不确定系统的鲁棒控制与鲁棒滤波中的运用 。同时探 讨了时滞系统与非线性系统的研究现状 。然后列举了一些具有代表性的采用 L M I 求解控 制问题的最新结果 。为了说明线性矩阵不等式的求解过程 ,给出了一个保性能控制的例 子 ,在 Matlab 513 编辑器中运行程序 ,得到的结果是最优性能指标值 , copt = J 3 101677 7 。 关 键 词 : 线性矩阵不等式 ;时滞 ;凸优化 ;L M I 工具箱 中图分类号 : TP 13 文献标识码 : A
1 引 言
在过去的 10 余年内 ,由于线性矩阵不等式 (L M I) 的优良性质以及解法的突破 ,使其在控制 系统分析和设计方面得到了广泛的重视和应用 。 在此之前 ,绝大多数的控制问题都是通过 Riccati 方程或其不等式的方法来解决的[1~3 ] 。但是解 Riccati 方程或其不等式时 ,有大量的参数和正定 对称矩阵需要预先调整 。有时 ,即使问题本身是 有解的 ,也找不出问题的解 。这给实际应用问题 的解决带来极大不便 ,而线性矩阵不等式方法可 以很好地弥补 Riccati 方程方法的上述不足[4 ] 。 在解线性矩阵不等式时 ,不需要预先调整任何参 数和正定对称矩阵 。本文对 L M I 在控制工程中 的发展和现状进行简要的回顾 ,着重讨论 L M I 在 不确定控制系统中的应用研究成果以及展望 。
表 1 基于 LMI 方法的各种控制与滤波问题
序号
系统描述
采用方法
文献
1
不确定线性系统和非线性系统的状 基于 L M I 转化为凸优化问题求得鲁棒界 ;对于非
[14 ]
态反馈以及输出反馈表述
线性如 L urie 系统则通过 yapunov 函数方法得到
[15 ]
系统稳定的 L M I 判定准则
在控制 、辨识和信号处理等领域中 ,许多问题 都可以转化成用线性矩阵不等式来描述的优化问 题 。这里介绍 3 类标准的线性矩阵不等式问题及 其求解 :一是可行性问题 (L M IP) ;二是特征值问 题 ( EV P) ; 三 是 广 义 特 征 值 问 题 ( GEV P) 。在 MA TLAB 软件的线性矩阵不等式工具箱 (L M I Toolbox) 中给出了 3 类问题的求解器 。控制系统 中的一些性能指标 、稳定性判据可以转化为 L M I 的 3 类标准问题 ,其原因是由于一方面 Lyapunov 方法易得到凸的或拟凸的条件 ,另一方面 L M I 本 身能表示范围广泛的不同类凸约束 。
等 ;俞 立 (19612) ,男 ,浙江杭州人 ,浙江工业大学教授 ,博士 ,主要从事鲁棒控制 、时滞系统的分析与控制等研究 。
·146 ·
控 制 工 程 第 10 卷
阵的 Schur 补性质 ,一些非线性矩阵不等式可以 转化成线性矩阵不等式 。从而利用现有的软件 Matlab 中的 L M I 工具箱可以直接对问题求解 。
=
F
T i
∈ Rn ×n , i
= 0 ,1 , …, m , 是一组给定的实
对称矩阵 ,式 (1) 中的“ < ”指的是矩阵 F ( x) 是负
定的 ,即对所有非零的向量 v ∈ Rn , vT F ( x) v < 0 或 F ( x) 的最大特征值小于零 。所有满足线性矩 阵不等式 (1) 的 x 的全体构成一个凸集 。
3 基于 LMI 的不确定系统鲁棒控制器与 滤波器的设计
不确定系统的鲁棒控制与滤波问题的提出基 于如下考虑 。
①被控 对 象 不 是 由 一 个 确 定 的 模 型 来 描 述 的 ,仅仅知道模型属于某个已知的模型集合 ;
②外部信号包括干扰信号和传感器噪声等不 是具有已知特性的信号 ,仅仅知道其属于某个已
给出矩阵的 Schur 补引理及其性质 。
引 理 :对给定的对称矩阵 F ( x) ,以下 3 个
结论是等价的 。
(i) F ( x) < 0 ;
(3)
(ii) F11 ( x) < 0 ,
F22 ( x) - F1T2 ( x) F1-11 ( x) F12 ( x) < 0 ;
(4)
(iii) F22 ( x) < 0 ,
F11 ( x) - F12 ( x) F2-21 ( x) F1T2 ( x) < 0 。
(5)
注意到式 (4) 和式 (5) 中的第二个不等式是一个非
线性矩阵不等式 ,上述的等价关系说明了应用矩
收稿日期 : 2002 - 09 - 13 作者简介 : 高金凤 (19782) ,女 ,安徽巢湖人 ,浙江工业大学硕士研究生 ,主要研究方向为不确定系统的鲁棒控制与 NCS 的稳定性
在线性矩阵不等式使用之前 ,许多控制问题 是用 Riccati 不等式方法来解决的 ,而 Riccati 不等 式的求解带有一定的保守性 。Riccati 不等式是 二次矩阵不等式 ,所以将二次矩阵不等式转化成 线性矩阵不等式很有必要和意义 ,在此转化过程 中 ,矩阵的 Schur 补引理起着决定性的作用 。考 虑一个矩阵 F ( x) ∈ Rn ×n ,并将 F ( x) 进行分块
与此同时 ,不确定系统的鲁棒辨识与鲁棒估 计也得到了一定程度的发展 。早期的滤波器设计
第 2 期 高金凤等 : 线性矩阵不等式及其在控制工程中的应用
·147 ·
是基于 Riccati 方程的求解 ,但是矩阵 Riccati 方程 国内外众多学者都对基于 L M I 方法的各种控制 所求的 解 是 空 间 唯 一 的 点 。所 以 近 年 来 使 用 与滤波问题进行了由浅入深的研究 ,具有代表性 L M I 方法设计满足性能指标的滤波器得到广泛 的研究成果详见表 1 。表中不仅仅列举了基于 的应用[13 ] 。基于 L M I 方法的时域状态空间的不 L M I 的不确定系统的控制器与滤波器设计 ,还有 确定系统的分析与综合 ,具有能揭示系统的内部 L M I 技术应用在时滞系统 、非线性系统等方面的 结构和易于计算机辅助设计等优点而倍受重视 。 成果 。
2003 年 3 月 第10卷第2期
控制工程 Cont rol Engineering of China
Mar . 2 0 0 3 Vol. 10 ,No . 2
文章编号 : 167127848 (2003) 0220145205
线性矩阵不等式及其在控制工程中的应用
高金凤 , 俞 立 , 王春平
(浙江工业大学 信息工程学院 , 浙江 杭州 310032)
知的信号集合 。 对于这两种情况 ,加拿大学者 Zames 于 1981
年提出了以控制系统的某些信号间的传函矩阵的 H ∞范数作为优化性能指标的设计思想[6 ] 。美国
学者 Doyle 于 1982 年针对 H ∞性能指标发展了 结构 奇 异 值 的 方 法 来 检 验 鲁 棒 性[7 ] 。1988 年 Doyle 等 人 在 全 美 控 制 会 议 上 发 表 的 著 名 的 D GKF 论文为标志 ,将 H ∞控制器的设计归结为 两个 Riccati 方程的求解[8 ] 。进入 20 世纪 90 年 代 ,L M I 技术引入到 H ∞鲁棒控制 ,L M I 的引入 不但降低了 H ∞控制的限制条件 , 而 且 扩 展 了 H ∞控制的研究领域[9 ] 。此后 ,解决鲁棒控制问
题比较成功和完善的 H ∞理论取得了长足的发 展 ,经历了从频域到时域 、从定常系统到时变系 统 、从线性系统到非线性系统 、从连续系统到离散 系统 、从无时滞系统到时滞系统以及从单目标到 多目标的控制等发展历程 。
随着不确定系统鲁棒二次镇定和 H ∞状态空 间理论研究所取得的突破性进展 ,保成本控制引 起许多学者的极大兴趣并得到了不少成果 。一个 实际控制系统仅仅具有稳定性是不够的 ,还必须 考虑其他的一些性能 。线性二次型最优控制理论 揭示了一个适当的二次型性能指标 ,能反映系统 的许多性能要求 。最初由 Chang 和 Peng[10 ]提出 了不 确 定 系 统 的 保 性 能 控 制 问 题 ( Guaranteed Cost Control 简称 GCC) ,其主要思想是对具有参 数不确定性的系统 ,设计一个控制律 ,不仅使得闭 环系统稳定 ,而且使得闭环系统的性能不超过某 个确定的上界 。近年来有许多学者针对这个问题 作了积极地探讨 ,典型的结论如文献[ 11 ] ,针对一 类范数有界的时变参数不确定性的离散时间线性 系统 ,设计其最优保性能状态反馈控制律 ,通过采 用线性矩阵不等式方法 ,导出了存在保性能控制 律的一个充分必要条件 ,文中与 Riccati 方程的方 法作了比较 ,结果说明 L M I 方法降低了闭环系统 性能指标的保性能值 。而文献[ 12 ]针对一类同时 带有状态和输入时滞不确定离散系统以及给定的 二次型性能函数 ,同样采用线性矩阵不等式的方 法 ,研究了使得闭环系统稳定和性能指标函数值 不超过某个特定的上界的控制律设计问题 。
①多目标控制器综合 ,包括 L Q G 综合 , H ∞ 综合和极点配置综合 。
②系统鲁棒性的分析和测试 ,包括检测时变 线性系统的二次稳定性 ,带有参数的 L yapunov 稳 定性 , 混 合 的 μ 分 析 以 及 带 有 非 线 性 成 分 的 Popov 准则 。