汽车电子实验-雷达
车联网小车实验报告(3篇)

第1篇一、实验目的本次实验旨在通过搭建车联网小车平台,学习车联网技术的基本原理和实现方法,了解车辆环境感知、通信协议、智能控制等相关知识,培养学生的动手能力和创新思维。
二、实验背景随着物联网技术的飞速发展,车联网已成为未来汽车工业和智能交通领域的重要发展方向。
车联网技术通过将车辆与互联网连接,实现车辆之间的信息共享、协同控制和智能化服务。
本次实验旨在通过搭建车联网小车平台,让学生了解车联网技术的基本原理和实现方法。
三、实验内容1. 车辆环境感知实验(1)实验目的:学习车辆环境感知技术,实现小车对周围环境的感知。
(2)实验内容:使用超声波传感器和红外传感器对小车周围环境进行感知,包括障碍物距离、温度、湿度等。
(3)实验步骤:①搭建小车平台,连接超声波传感器和红外传感器;②编写程序,读取传感器数据,进行数据处理;③实现小车避障、跟随等功能。
2. 监控系统及光纤通信实验(1)实验目的:学习监控系统及光纤通信技术,实现小车信息的实时传输和监控。
(2)实验内容:使用摄像头和光纤通信模块,实现小车信息的实时传输和监控。
(3)实验步骤:①搭建小车平台,连接摄像头和光纤通信模块;②编写程序,实现摄像头图像采集和光纤通信数据传输;③实现小车监控画面实时显示,并对传输数据进行处理。
3. 驾驶行为实验(1)实验目的:学习驾驶行为分析技术,实现小车对驾驶员行为的识别和响应。
(2)实验内容:使用摄像头和加速度传感器,对驾驶员行为进行分析。
(3)实验步骤:①搭建小车平台,连接摄像头和加速度传感器;②编写程序,实现驾驶员行为识别和响应;③实现小车对驾驶员行为的实时反馈。
四、实验结果与分析1. 车辆环境感知实验通过实验,我们成功实现了小车对周围环境的感知。
超声波传感器和红外传感器能够准确测量障碍物距离,摄像头能够实时采集小车周围环境图像。
通过数据处理和图像识别技术,小车能够实现避障、跟随等功能。
2. 监控系统及光纤通信实验通过实验,我们成功实现了小车信息的实时传输和监控。
十大汽车倒车雷达品牌排行榜

十大汽车倒车雷达品牌排行榜NO.1元润元润电子有限公司是一家拥有进出口权的专业从事汽车电子配件生产的公司,公司位于中国广东省东南部的汕头市,汕头是全国5个经济特区之一也是一个美丽的沿海开放港口城市。
现阶段,我司专业从事汽车中控锁,报警器,倒车雷达,电动窗、后备箱开启器和氙气灯的研究、开发及生产。
目前,产品已销往世界40多个国家和地区。
元润电子拥有强大的技术力量及成套先进的生产、测试设备,所有产品按照国际相关质量标准生产,以确保产品的高质量及具竞争性的价格。
如果您对我们的产品感兴趣或正在寻找OEM/ODM的供应商,那么我们将是您的首选,请让我们及时了解您的需要,您的关注我们无限感激。
NO.2英智英智汽车电子科技有限公司(中外合资)系全球最大的汽车配件供应商之一-巴西EAE汽车配件集团投资并指定生产基地。
英智公司通过ISO9001(2000版)国际标准管理体系认证,通过严格的美国FCC产品质量认证。
英智公司座落于风景秀丽的中国海峡西岸经济区,国家级高新技术产业开发区--福州软件园B区英智科技园内,英智现拥有1万平米的生产基地,30名专业技术员工,100名专业人员,月生产能力达10万台。
英智公司不断加强研发实力,巴西研究中心和福州研究所参与产品开发中心和福州研究所参与产品开发研制的技术人员中拥有5位博士13个硕士、100多个学士,以较高的速度开发新产品不断满足市场的需求。
大胆的创新、人性化的设计,零缺陷的品质受到国内外用户的一致好评,真正做到生产一代、设计一代、思考一代的开发境界。
英智并没满足现状,仍不断提升生产能力,技术水平,并通过引进日本YAMAHA进口的高速贴片机;德国高精度模具加工设备;日本人ICT在线检测仪及波峰全自动焊机等国际一流的生产线、生产管理理念,努力构建世界级的生产基地。
NO.3艾奇亚宁波雷顿科技有限公司是专业生产汽车防盗器,中控锁,倒车雷达,继电器,双向防盗器,我司于2003年通过ISO9001,于2004年通过TS16949,专业出口,主要是与国外的车厂配套。
汽车电器维修与检测实训报告
汽车电器维修与检测实训报告
随着汽车电子技术的发展,汽车电器检测和维修技术也在不断地发展,以确保汽车正
常运行,从而辅助汽车完成各种任务。
本报告详细地描述了汽车电器检测与维修技术的实
践步骤。
首先,在汽车电器维修和检测开始前,我们需要进行汽车机械部分和电子系统部分的
检查和维修,以确保汽车发动机维护正常工作。
其次,检查和维修汽车电子系统中的电气
设备,包括起动机,新能源系统,无线设备,安全系统,雷达,导航系统,动力系统等。
其中,起动机是汽车系统中最重要的组件之一,因此应当加强其维护。
此外,还要根据汽
车系统的构造结构,定期检查汽车排气系统,电子钥匙,蓄电池,发电机,排气系统和燃
油系统等部分,以确保汽车正常运行。
接下来,在实践过程中,我们要充分利用先进的汽车检测设备,检查汽车的电子电路,维修汽车中的各种电子元件,如发动机计算机、控制器、接收器、电机和开关等,以确保
汽车电子系统能正常工作。
此外,还可以应用汽车故障诊断仪等专业设备,如发动机故障
诊断仪、安全系统检测仪、导航系统检测仪,根据汽车的实际情况分析,为故障的汽车电
子系统提供修复性服务。
综上所述,汽车电器检测与维修技术是一项非常重要的技术,它可以有效地确保汽车
在维修与检测过程中正常运行。
而先进的检测设备和专业的检测服务,更是可以有效提高
汽车电子系统的性能。
汽车电子零部件环境可靠性与EMC测试服务项目

汽车电子零部件环境可靠性与EMC测试服务项目汽车是由多达几千个电子零部件组成的复杂产品,特别是随着汽车产业的发展,控制电子部分、娱乐多媒体电子部分、导航及车载通信等等越来越多,使车辆复杂程度不断加大。
而这些电子零部件产品可靠性十分重要,直接决定了整车的安全及运行可靠性。
特别是严苛的环境(运输过程、存放、工作中、气候等等),都在考验着汽车电子产品的可靠性。
目前汽车电子产品主要分以下三类:1、电子元器件。
包括GPS、音箱、汽车DVD、倒车雷达、控制器、运算放大器、切换式电源供应器、各类微处理器、计算机等。
2、继电器及电机马达。
包括各类继电器、雨刮器电机、电动天线、空调电机、暖风电机、电动坐椅、前后视镜电机、中央控制门锁、交流发电机、清洗泵电机等。
3、各类传感器。
其中传感器和继电器的发展最为活跃。
它是汽车上应用最多的两类汽车电子设备。
广电计量汽车零部件检测实验室作为CISPR国际委员会委员单位,GRGT在汽车电子检测领域有着多年的丰富经验和雄厚的技术实力,是日产、本田等著名汽车公司和奇瑞、吉利、长城、众泰、广汽、比亚迪、福田、江淮等民族自主品牌车企的认可实验室,是国家CNAS认可电磁兼容性检测中心,也是目前华南地区检测能力最全面的EMC检测机构。
广电计量汽车零部件检测实验室通过卓越的质量保证服务,协助日产、本田、长城、航盛、法雷奥等知名整车企业和零部件企业质量技术不断进步。
汽车零部件测试内容:Ⅰ环境可靠性测试Environment &Reliability Test高温储存(可带表面红外加热)High Temperature Test (with IR)低温储存Low Temperature Test湿热交变(可带表面红外加热)Hemperature & Humidity Test (with IR)凝露测试Condensation Test低气压测试Low Pressure Test温度冲击测试Thermal Shock Test防尘防水测试Dust & Water Resistant Test盐雾测试(中性、交变、铜离子加速)Salt Spray Test(NSS、CCT、CASS)耐气体腐蚀Gas Corrosion Resistant Test耐化学试剂Chemical Resistant Test振动测试(随机、正弦、扫频等)Vibration Test (Random/ Sine /Sweep)(1ton~20ton)机械冲击测试Mechanical Shock Test碰撞测试Bump Test跌落测试Drop Test三综合测试(温湿度+振动)Compositive Environment Test (Temperature & Humidity &Vibration) 高加速测试HALT & HASS插拔力检测Operation Force Test刚度测试Rigidity Test洗车刷测试Automatic Car Wash TestⅡ功能耐久性测试Function & Endurance Test按键动作耐久测试Button Operation Durability插拔耐久测试Connection DurabilityCD机动作耐久测试CD Player Operation Durability出风口耐久测试Register Operation Durability雨刮耐久测试Wiper Operation Durability四门两盖耐久测试Front Doors/Rear Doors/Back Door/Hood Operation Durability座椅动作耐久测试Seat Operation Durability玻璃升降器动作耐久测试Glass Regulator Operation Durability遮阳板动作耐久测试Sunvisor Operation Durability门板受力耐久测试Door Trim Stress Endurance TestⅢ电学性能测试Electrical Performance Test电源特性测试Resistance to Power Supply Voltages电源缓升缓降测试Resistance to Slow Decrease and Increase Power of Supply Voltages电压特性测试Re-initialization Test电压异常测试Resistance to Non Usual Power Supply Voltages线路(短路至地/电源)测试Resistance to Ground and Positive Supply Voltages Short Circuit 感性负载电源连接测试Resistance of Inductive Load Connected Circuits电源微中断测试Resistance to Power Supply Micro-interruptions (UPDATED)启动测试Resistance to Starting Profile电源电压特性测试Power Supply Voltage Characteristics Test浮地测试Floating Ground Test感应噪声抗扰度Induction Noise Resistance Test抛负载测试Load Dump Test过压测试Overvoltage Test点火脉冲测试Ignition Pulse Test反极性测试Reversed Polarity Test工作电压Working Voltage工作电流Working Current绝缘电阻测试Insulation Resistance TestⅣEMC测试EMC TestRE辐射骚扰Radiated EmissionCE传导骚扰Conducted EmissionBCI大电流注入Bulk Current InjectionRI电波暗室法辐射抗扰度?RI瞬态传导骚扰Transient, Conducted Emissions瞬态传导抗扰度Conducted Immunity静电放电抗扰度ESD脉冲波测试Resistance to on Board Power System Voltage Ripples高电压注入抗扰度测试Immunity to Injection High Voltage脉冲抗扰度测试Resistance to Impulsive Transient音频磁场辐射抗扰度测试Immunity to Audio Frequency Magnetic Field手持式收发机抗扰度测试Resistance to Handy Transmitters脉冲波抗扰度测试Immunity Against High Frequency Surge (Burst Wave Form)高周波抗扰度测试Immunity Against High Frequency Surge (Impulse Wave Form) 低周波测试Low Frequency Surge Resistance(Induced Load Surge)磁场骚扰测试Measurement of Magnetic Field Radiated Emissions宽带辐射抗扰度测试Broadband Antenna Nearby Test辐射天线靠近抗扰度Radio Equipment Antenna Nearby Test移动手机天线靠近测试Mobile Phone Antenna Nearby Test汽车电子暗室有效性Anechoic Chamber Field Validation屏蔽室屏蔽效能Shielding Room Shieding Effective暗室电压驻波比VSWR。
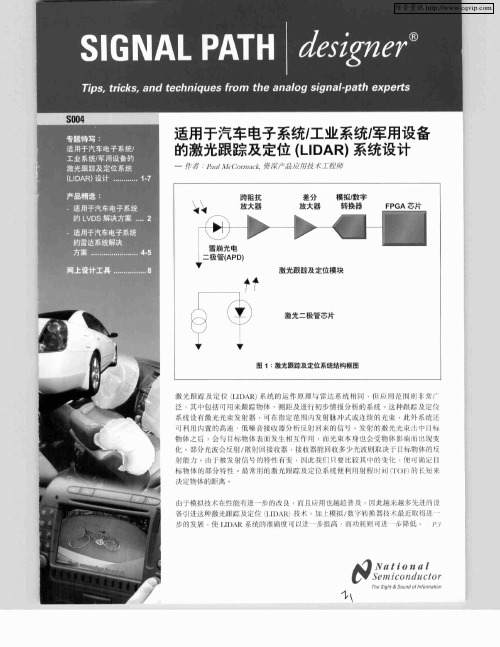
适用于汽车电子系统/工业系统/军用设备的激光跟踪及定位(LIDAR)系统设计
4 0Mb s堕通道 L D 动器 O p VS
4 0Mb s越埔 岿 L D 接 啦翮 0 p VS 4 0Mb s般] 通 L S 驱 器 0 p 目 VD
4 0 Mb s壕埔量 订抽小 一 1 5 C的版率可f 垃礴 0 p 囱 2“ n
4 0Mb s惰主 量 -勾置精 ^ 终蚓 被曹 - 0 p 缃 刳装 d巧 、 母 诵 适 的恃 辅 一 4 0 Mb s一目装d 巧 0 p 柯 15c 帕 瓶牛 可 供遣 悍 2
宵 1 5C 自腼 率 可供 世 署 2 q
D 9L 0 8 8 0V 2^
D 9 L0 4 S oV 8 D 9 L8 4 S OV 0 D g CP 2 S 0 2
D 9L I 2A S 2V O'
4 0Mb s职沔| V S隘 船 0 p 荫L D
15G p 逋 L D 啦 器 b s4 V SL l f 0Mb s4埔 迤 L DS中 器 0 p V 8 0Mb s 2 2 VDS 安置 玎关 0 p L 1 6至 8 z1 垃 串行 龋 盟 肝串 嚣 0MH 0 5莹 3 5MH z 帝 舟流 申牛 2 “ 元 4 L DS 申行 船址 解 牢黜 V
D 9 L 1 1A S 2V 22 D 9 C2 1l 4 S 0 4 f2
豫 ^ 式 - 蛆 糍 差 缱 列 - 1 5’ 的脓 卒 u惧 诜 撵 、 J 有 2 C J 2 41髓 12 出行 瞻f : 4 艄 器 粕 偷 出蜘 加 重 血流 电 街 F 盘 档台 擂 口 .0 C 4 + 5c 赢 佩崖 幽 1 0 艟
化 部分)波会反 }/ 匕 ¨ 敞削 接收器 接收器能l收 多少光波则取决 r几标物体的埂 I ¨ 刑能 幽 J被发 信 的特性有变 ・ 此找竹 J 受 比较弛中n 变化 似 f潮赶 川 : ! 0 』 标 物体 的部分特1- 蚰常 n 激 】 踪驶宅他系缆他利川刑 叫川 1 ) “ { 乜 】 跟 【¨的 泉 决定物体的趴离
面向智能汽车的毫米波雷达测试系统研究

面向智能汽车的毫米波雷达测试系统研究摘要:随着智能汽车的不断发展和普及,毫米波雷达作为智能汽车的重要感知器件,其可靠性和性能测试越来越受到重视。
本文研究了一种面向智能汽车的毫米波雷达测试系统,该系统基于毫米波信号的特点和测试需求,结合现有的毫米波雷达测试技术,设计了一套完整的测试方案和测试系统。
通过对实验数据的分析和验证,证明了该测试系统具有较高的可靠性和测试精度,可以为智能汽车的毫米波雷达测试提供有效的支持和保障。
关键词:智能汽车;毫米波雷达;测试系统;性能测试引言随着智能汽车的不断发展和普及,毫米波雷达作为智能汽车的重要感知器件,其可靠性和性能测试越来越受到重视。
目前,毫米波雷达测试主要采用仿真和实验相结合的方法,但由于毫米波信号的特殊性和测试要求,测试系统的设计和实现仍然存在一定的难度和挑战。
因此,本文研究了一种面向智能汽车的毫米波雷达测试系统,旨在为智能汽车的毫米波雷达测试提供有效的支持和保障。
一、系统架构设计系统架构设计是指根据需求和系统功能,将系统划分为若干个模块,明确模块之间的关系和职责,建立系统的组织结构。
在进行系统架构设计之前,需要明确系统的功能和需求。
通过对用户需求和业务流程的分析,确定系统的功能和需求,作为系统架构设计的基础。
根据系统的功能和需求,将系统划分为若干个模块。
每个模块应该具有清晰的职责和功能,模块之间应该相对独立,便于系统的维护和升级。
可以采用模块化设计的方式,将系统分为数据存储、业务逻辑处理、用户界面等模块。
在划分好模块之后,需要建立模块间的关系。
模块间的关系可以是协同、合作或依赖,需要根据实际情况进行确定。
模块之间的通信可以通过接口、消息传递等方式实现。
系统架构设计中,需要选择适合的架构模式。
常见的架构模式有MVC、MVP、MVVM等。
需要根据系统的特点和需求,选择合适的架构模式,确保系统具有良好的可维护性、可扩展性和可重用性。
在系统架构设计中,需要考虑系统的安全性和稳定性。
智能车项目实验报告(3篇)
第1篇一、项目背景随着科技的飞速发展,智能车技术已成为现代交通运输领域的重要研究方向。
本项目旨在设计和实现一款具备自主导航、避障和路径规划功能的智能车,以提高交通运输的效率和安全性。
通过本项目的研究与实验,旨在探索智能车技术在实际应用中的可行性和有效性。
二、项目目标1. 设计并实现一款具备自主导航、避障和路径规划功能的智能车;2. 评估智能车在不同复杂环境下的性能和稳定性;3. 探索智能车在现实场景中的应用前景。
三、实验内容1. 硬件平台搭建本项目选用STM32单片机作为核心控制器,搭载激光雷达、毫米波雷达、摄像头等传感器,以及电机驱动模块和无线通信模块。
具体硬件配置如下:- 单片机:STM32F103C8T6- 传感器:激光雷达、毫米波雷达、摄像头- 电机驱动:L298N- 无线通信模块:蓝牙模块2. 软件平台开发本项目采用C语言进行软件开发,主要包括以下模块:- 控制模块:负责处理传感器数据,实现避障、路径规划和导航等功能;- 传感器数据处理模块:对激光雷达、毫米波雷达和摄像头等传感器数据进行处理和分析;- 电机驱动模块:控制电机驱动模块,实现智能车的运动控制;- 无线通信模块:实现与上位机或其他设备的通信。
3. 实验步骤(1)环境搭建:搭建实验场地,布置激光雷达、毫米波雷达、摄像头等传感器,并连接单片机。
(2)传感器标定:对激光雷达、毫米波雷达和摄像头等传感器进行标定,确保数据准确。
(3)编程实现:编写控制模块、传感器数据处理模块、电机驱动模块和无线通信模块等程序。
(4)调试与优化:对智能车进行调试,优化各项功能,提高性能和稳定性。
(5)测试与评估:在不同复杂环境下对智能车进行测试,评估其性能和稳定性。
四、实验结果与分析1. 避障功能在实验过程中,智能车能够有效识别和避开障碍物,包括静态和动态障碍物。
避障效果如下:- 静态障碍物:智能车能够准确识别并避开障碍物,如树木、电线杆等;- 动态障碍物:智能车能够识别并避开行人、自行车等动态障碍物。
雷达习题
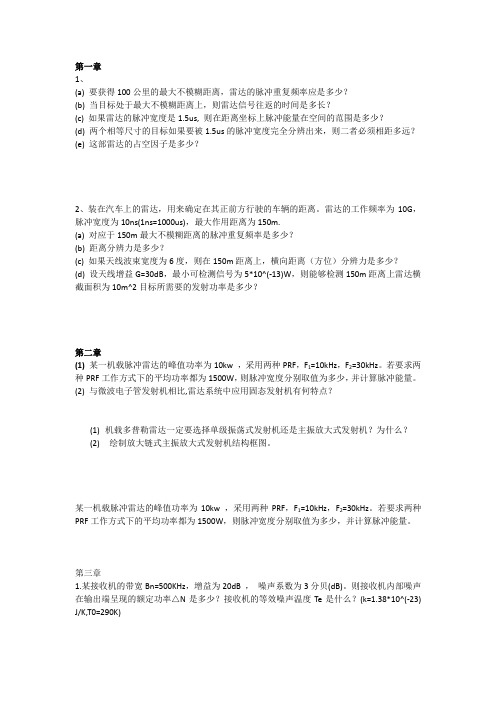
第一章1、(a) 要获得100公里的最大不模糊距离,雷达的脉冲重复频率应是多少?(b) 当目标处于最大不模糊距离上,则雷达信号往返的时间是多长?(c) 如果雷达的脉冲宽度是1.5us, 则在距离坐标上脉冲能量在空间的范围是多少?(d) 两个相等尺寸的目标如果要被1.5us的脉冲宽度完全分辨出来,则二者必须相距多远?(e) 这部雷达的占空因子是多少?2、装在汽车上的雷达,用来确定在其正前方行驶的车辆的距离。
雷达的工作频率为10G,脉冲宽度为10ns(1ns=1000us),最大作用距离为150m.(a) 对应于150m最大不模糊距离的脉冲重复频率是多少?(b) 距离分辨力是多少?(c) 如果天线波束宽度为6度,则在150m距离上,横向距离(方位)分辨力是多少?(d) 设天线增益G=30dB,最小可检测信号为5*10^(-13)W,则能够检测150m距离上雷达横截面积为10m^2目标所需要的发射功率是多少?第二章(1) 某一机载脉冲雷达的峰值功率为10kw ,采用两种PRF,F1=10kHz,F2=30kHz。
若要求两种PRF工作方式下的平均功率都为1500W,则脉冲宽度分别取值为多少,并计算脉冲能量。
(2) 与微波电子管发射机相比,雷达系统中应用固态发射机有何特点?(1)机载多普勒雷达一定要选择单级振荡式发射机还是主振放大式发射机?为什么?(2)绘制放大链式主振放大式发射机结构框图。
某一机载脉冲雷达的峰值功率为10kw ,采用两种PRF,F1=10kHz,F2=30kHz。
若要求两种PRF工作方式下的平均功率都为1500W,则脉冲宽度分别取值为多少,并计算脉冲能量。
第三章1.某接收机的带宽Bn=500KHz,增益为20dB ,噪声系数为3分贝(dB)。
则接收机内部噪声在输出端呈现的额定功率△N是多少?接收机的等效噪声温度Te是什么?(k=1.38*10^(-23) J/K,T0=290K)2.某接收机的线性部分由传输线、变频器和中频放大器三部分组成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《汽车电子学》课程实验报告
——多普勒雷达测速试验
专业________________
姓名________________
学号________________
2010-10-11
《汽车电子学》实验报告
1
多普勒雷达测速实验
一、实验目的:
1、掌握雷达测速的原理
2、了解雷达的安装、使用方法和注意事项
3、验证雷达测速的效果
二、实验原理:
1、基于多普勒效应的雷达测速原理
雷达的工作原理:雷达发射某一固定频率的微波,如遇到活动目标,回波的频率与发射波的频率出现
频率差,称为多普勒频移(Doppler shift)。根据多普勒频移的大小,可测出目标对雷达的径向相对运动
速度;根据发射脉冲和接收的时间差,可以测出目标的距离。
现简单描述一下多普勒效应:
多普勒效应——波源与观察者有相对运动时,观察者接收到的频率与波源发射频率不相同的现象。如
当鸣笛的火车开向站台,站台上的观察者听到的笛声变尖,即频率升高;相反,当火车离开站台,听到的
笛声频率降低。现讨论以下三种情况。
(1)设波源的频率为sf,观察者接收到的频率Rf,波的频率f,波速为u。
相对于媒质,波源不动,观察者以速度Rv向着波源运动 ,如图1a。(波长不
变、等效的波速变化) 。
则(1)RRRRuvuvuvffufu
(2)相对于媒质观察者不动,波源以速度sv向着观察者运动,如图1b。因
为波源所发出的相邻的两个同相振动状态是在不同地点发出的,这两个地点相隔
的距离为ssvT,其中为波源周期sT。如果波源是向着观察者运动的,这后一地点
到前方最近的同相点之间的距离是现在媒质中的波长。
波源运动,在媒质中的波长:
0()(2)sssss
s
uvvTuvTf
对应波的频率为:(波速不变,等效的波长变化)
(3)ssuuffuv
由于观察者静止,所以他接收到的频率就是波的频率:
Rs
s
u
fffuv
, 0)0)ssvv波源朝向观察者运动(,频率升高波源远离观察者运动(,频率减小
(3)相对于媒质,波源和观察者同时运动,则有如下:
仅观察者运动时,观察者所接收到的频率如(1)式,RRuvffu
仅波源运动时,介质中波的频率如(3)式,ssuuffuv
将(3)式中的f代入(1)式,得
(4)RRssuvffuv
,0,00,0RsRsvvvv波源, 观察者相向运动时, 最大波源, 观察者背向运动时, 最小
S
0sv
R
v
u
S
s
v
ss
Tv
a
b
1图多普勒效应原理示意图
《汽车电子学》实验报告
2
2 多普勒雷达测量拖拉机对地速度原理
在农业机械的研究和鉴定试验中,许多的参数都与农机
具的行走速度有关。例如,计算谷物产量时,需要检测联合
收割机的速度;分析排种均匀性时,需要借助播种机的行走
速度,等等。因此,人们在不断研究新的测量方法和新的测
量仪器,以满足不同场合的测速需要,而且把直接测量运动
物体的相对速度作为主要的研究方向。非接触测量方法有多
种,如基于视频的测速、红外线等方法测量速度;但是每种
方法都有各自的优缺点。超声波常应用于高速测量,激光测
速法对测量角度的要求比较严格,基于视频的速度测量,是
测定固定时间间隔的两幁连续序列图像中目标的相对位移
实现速度测定,这种方法一般要求摄像机要固定不动,但目
前在国内这方法还没应用于农业。在农业作业机械自动控制
系统中,对于对地行走速度的测量是一个非常重要的方面。
如图2所示,雷达安装角度为,发射的微波信号频率
是0f,速度为光速c,车辆前进速度为Fv,设地面反射的
回波频率为1f,此时可看作波源运动,观察者静止的情况。
则有
10
(5)cosFcffcv
微波反射回来时,设雷达接收到的频率为2f,此时可
看作是波源静止,观察者运动的情况,则有
210
coscos(6)cosFFFcvcvfffccv
故多普勒频移2102coscosFFvffffcv,而车辆对地速度
20
200
1(7)cos2cosFffccfvfff
附注:如果车辆行驶过程中产生俯仰变化时,要准确测量车辆相
对地面速度,需要在车辆上安装两个多普勒雷达,一个向前发射微波
信号另一个向后发射,得到的两个不同值的多普勒频移f,取平均后
再求速度即为当前车辆相对地面行驶速度。如图3所示。
三、实验设备
1. 美国帝强DjRVS Ⅱ雷达测速传感器介绍
此雷达测速传感器如图3所示,其固有的微波频率是
24.125 GHz ±50 MHz,工作电压范围是9V~16V,输出的是幅
度+12V的频率信号,其测速范围在0.53 到 107 km/h,实际的
速度测量误差:<±5%(0.53 to 3.2 km/h),<±3%(3.2 to 107
km/h)。雷达在车辆上的安装图如图4所示:
2图雷达测速示意图
3图俯仰时雷达测速示意图
后方测量系统
前方测量系统
图3 雷达测速传感器
图4 雷达安装图
《汽车电子学》实验报告
3
2. 测速电路与连接框图
由于雷达输出电压为12V,而实验中使用的单片机stm32103ve端口承受电压不超过5V,故需要降低
输入电压,这里采用一个2K电阻和1K电阻串联方式,1K电阻靠近输入电压端电压为3V,作为单片机的
输入信号。雷达、单片机与电脑的连接示意图如下图5所示。
数传模块A数传模块B
STM32单片机PC多普勒
雷达
Matlab输出频率
车辆对地速度串口
串口
图 5 器件连接框图
四、实验内容:
1. 实验1
① 在实验场地(土槽楼前平地),用激光测距仪测量一段直线段ab;
② 接好电源线路;
③ 将车辆加速到一定速度匀速通过ab段;用秒表记录车辆经过此直线段的时间,过程中读取雷达频率数
据并保存;
④ 测量另一长度距离,重复步骤3;
⑤ 重复步骤4。
将试验数据填入下表(数据处理可参考 2.实验数据处理)。
表格 1 实验数据
距离s 时间t 平均速度v 雷达所测的平均速度
第一次
第二次
第三次
2.实验数据处理
实验数据处理有两种常用方法,利用Excel表格或Matlab处理。下面简单说一下Excel表格处理的
方法。
① 新建一个Excel表格;
② 点击“数据”菜单,再点弹出的下拉菜单“导入外部数据”,选择“导入数据”;
③ 导入数据后,选择数据组,点击“插入”菜单中的“图表”项,工作区将会出现“图表向导”;
④ 选择“标准类型”中的“折线图”,再在“子图表类型”中选第一个,得到类似图6 中的图形。
《汽车电子学》实验报告
4
0
20
40
60
801001201401601102203304405506607708809910101111121213系列1
图 6 Excel表格处理数据得到的图形
0200400600800100012001400
0
50
100
150
图 7 Matlab处理数据得到的图形
2. 实验2
① 用激光测距仪测量一段直线段ab;
② 拖拉机以变速经过ab直线段,期间记录雷达发出的频率数据;
请描绘出拖拉机速度变化波形(附纸)。
五、思考题
请详看附注并简述一下其原因(即为什么两个雷达能够测量拖拉机有俯仰变化时的对地速度)。