基于奇异值分解的机器人工具坐标系标定
机器人用户坐标系标定原理

机器人用户坐标系标定原理
机器人用户坐标系标定是指确定机器人执行任务时,用户所定义的坐标系和机器人内部坐标系之间的转换关系。
其原理主要基于机器人运动学和数学知识,可以通过以下几个步骤实现:
1. 确定机器人内部坐标系:机器人内部坐标系通常是由机器人制造商定义的,可以通过机器人手册或工程师的说明来确定。
2. 确定用户坐标系:用户坐标系是根据任务需求定义的坐标系,通常是机器人需要执行任务的工件或工作区域的坐标系。
3. 确定坐标系转换矩阵:通过坐标系转换矩阵,可以将用户坐标系转换为机器人内部坐标系。
具体的计算方法可以使用数学方法和软件工具来实现。
4. 进行实际标定:将标定板或其他标定物件放置在机器人的工作区域内,通过机器人运动完成一系列标定任务,记录机器人内部坐标系和用户坐标系之间的转换关系。
5. 验证标定结果:通过一系列验证任务来验证标定结果的准确性和可靠性。
如果结果不符合要求,则需要重新进行标定。
机器人用户坐标系标定是机器人系统中非常重要的一环,标定结果直接影响到机器人的执行精度和效率。
因此,标定过程需要仔细和认真地进行,确保标定结果的准确性和可靠性。
- 1 -。
机械臂的工具坐标系标定

机械臂的工具坐标系标定
标题:机械臂工具坐标系标定的重要性及步骤解析
引言:
机械臂是现代工业生产中不可或缺的设备,而机械臂的工具坐标系标定对于其正常运行和精确定位起着至关重要的作用。
本文将详细介绍机械臂工具坐标系标定的重要性以及标定的步骤解析。
第一部分:机械臂工具坐标系标定的重要性
1. 提高定位精度:机械臂工具坐标系标定可以确保机械臂在空间中的准确定位,提高工作精度,避免误差累积。
2. 确保操作安全:通过标定工具坐标系,机械臂可以准确抓取和放置物体,避免因定位不准确而导致的意外事故。
3. 提高工作效率:标定工具坐标系可以使机械臂快速准确地完成各种工作任务,提高生产效率和效益。
第二部分:机械臂工具坐标系标定的步骤解析
1. 安装标定板:在工作区域内安装标定板,标定板上有一组已知坐标的特征点,用于标定的参考。
2. 手动示教:通过手动示教的方式,将机械臂移动到标定板上的特征点位置,记录每个特征点的位置坐标。
3. 坐标计算:根据示教得到的特征点位置坐标,利用数学算法计算出机械臂工具坐标系的变换矩阵。
4. 标定验证:将机械臂移动到其他位置,通过与实际位置的对比验
证标定结果的准确性。
5. 标定优化:如果标定结果与实际位置存在偏差,可以通过迭代调整的方式进行优化,直至达到较高的标定精度。
结论:
机械臂工具坐标系标定是确保机械臂定位精度和工作安全的关键步骤。
通过合理的标定流程和准确的计算方法,可以提高机械臂的工作效率和生产效益。
因此,在机械臂的应用中,工具坐标系标定是不可或缺的重要环节,需要重视和精心操作。
通过正确的标定,机械臂可以更好地服务于人类的生产和生活需求。
一种工业机器人工具坐标系及零点自标定方法

一种工业机器人工具坐标系及零点自标定方法
一种工业机器人工具坐标系及零点自标定方法,包括以下步骤:
1. 建立机器人基坐标系{b}、工具坐标系{t}和空间对齐点世界坐标系{u},从而建立工业机器人的DH运动学模型。
2. 调整工业机器人各个关节角的角度,使得机器人工具末端与空间同一个点对齐n次,n大于或等于4,并记录每一次对齐时的各关节角值。
3. 建立{b}参数的误差模型。
4. 分析误差模型系数矩阵的病态程度,去除矩阵中线性相关列并对该矩阵进行优化。
5. 求解{b}参数误差模型,并对相应参数初步辨识并补偿。
6. 建立{b}和tcp参数的误差模型并执行步骤s4,求解 {b}和tcp参数的误差模型,并对相应参数补偿。
7. 建立{b}、tcp和零点的参数误差模型并执行步骤s4,进行参数误差辨识并补偿,对{b}、tcp和零点参数进行精确标定。
此外,本发明还提供了一种工业机器人工具坐标系及零点自标定方法,该方法通过多点对尖的机器人姿位参数,分阶段地建立参数误差模型,并对系数矩阵去除冗余参数,优化降低系数矩阵条件数之后,采用迭代最小二乘估计与消除高斯噪声的扩展卡尔曼滤波结合的参数辨识方法,进行求解并消除噪
声。
本发明的工业机器人工具坐标系及零点自标定方法,对TCP进行标定的同时,还能够寻回因各种原因丢失的机器人零点,成本低,效率高,而且操作简单,工程人员只需控制机器人进行姿态变换对齐尖点即可。
本发明可应用于机器人定位系统技术中。
请注意,具体的实现过程可能因实际应用场景、具体需求和现有技术的限制而有所不同。
在实施本发明时,可根据实际情况进行适当的调整和修改。
工具坐标系标定算法
工具坐标系标定算法
工具坐标系标定算法是一种将工具坐标系与机器人坐标系进行对应的过程。
通过标定,可以确定工具坐标系与机器人坐标系的转换关系,从而实现工具在机器人上的精确控制。
常用的工具坐标系标定算法有以下几种:
1. 朴素标定法:该方法通过测量一系列不同位置和姿态下的标定点,利用最小二乘法求解工具坐标系与机器人坐标系之间的转换矩阵。
该方法简单易行,但对标定点的数量和位置要求较高。
2. 非线性标定法:该方法基于最小二乘法,使用非线性优化算法(如Levenberg-Marquardt算法)来优化标定结果。
非线性
标定法能够处理更复杂的标定情况,但计算复杂度较高。
3. 多视角标定法:该方法通过利用多个摄像头对工具进行同时拍摄,在不同视角下测量标定点的位置和姿态,从而得到更准确的标定结果。
多视角标定法对硬件设备和标定场景要求较高,但能够获得更准确的标定结果。
4. 三维扫描标定法:该方法使用3D扫描技术对工具进行扫描,得到工具的三维模型,然后通过匹配三维点云与机器人坐标系的特征点,计算工具坐标系与机器人坐标系之间的转换关系。
三维扫描标定法能够获得高精度的标定结果,但需要相应的扫描设备和处理算法支持。
这些标定算法都有各自的优缺点,选择合适的标定方法需要根据实际需求和条件进行综合考虑。
简单描述机器人工具标定和工作台标定的详细步骤

简单描述机器人工具标定和工作台标定的详细步骤在工业自动化生产中,机器人工具标定和工作台标定是非常重要的步骤,它们的正确性直接影响到整个生产流程的自动化程度和生产效率。
下面我们就来详细介绍一下机器人工具标定和工作台标定的具体步骤。
1. 机器人工具标定机器人工具标定是指给机器人的末端工具进行标定,使其与机器人的运动轴系达到精确定位的关系,以保证机器人在工作过程中的精度和稳定性。
下面是具体的步骤:(1)准备标定工具:标定工具是一种精密量具,通常由一根准确刻度的标定棒和一个固定在末端的固定支架组成。
(2)安装标定工具:将标定棒装在工具支架上,固定在机器人末端,并将合适的传感器安装在机器人上,以便能够确定标定棒的位置和接触力。
(3)启动标定程序:机器人控制器上有一个特定的标定程序,启动该程序后,机器人会进行一系列的运动,将标定棒移动到不同的位置,并记录下每个位置的机器人末端坐标和轴角度。
(4)计算标定值:通过测量不同位置下标定棒的机器人末端坐标和轴角度值,计算出机器人在不同位置下的机械误差,从而得到校准参数。
(5)验证标定精度:将机器人末端运动到不同的位置,检测实际位置和期望位置之间的误差,以验证标定的精度和正确性。
2. 工作台标定工作台标定是指标定机器人工作时所用的工作台,并将工作台与机器人关联起来,保证机器人在工作过程中的精度和稳定性。
下面是具体的步骤:(1)准备标定器具:标定器具包括一个标准参考平面、一个角度标准、一个比较平面和一个电子水平仪。
(2)安装标定器具:将标准参考平面放置在工作台上,使用角度标准确定参考平面的水平度,并使用比较平面将工作台上的参考平面与标准参考平面进行比较,通过电子水平仪测量参考平面的角度,确保参考平面完全水平。
(3)启动标定程序:机器人控制器中有一个标定程序,启动该程序后,机器人会在工作台上运动,并检测工作台的水平度、直角度和位置精度。
(4)调整工作台:通过计算出机器人测量出的数据与理想值之间的误差,调整工作台上的部件,使工作台达到标准精度。
设置机器人工具坐标系

.设置工具坐标系方法一:六点法设置1.依次按键操作:MENU——- SETUP-—-F1 TYPE———Frames进入坐标系设置界面,见画面2。
按F3 OTHER选择ToolFrame 进入工具坐标系的设置界面,见画面3。
在画面1中移动光标到所需设置的TCP,按键F2 DETAIL入画面3;4.按F2 METHOD选择所用的设置方法Six point----六点法,进入画面4;5.为了设置TCP,首先要记录三个接近点,用于计算TCP点的位置,即TCP点相对于J6轴中心点的X,Y,Z的偏移量;具体步骤如下:a) 移动光标到每个接近点(Approach point N );b) 示教机器人到需要的点,按SHIFT+F5 RECORD纪录;c) 纪录完成,UNINIT变为RECORDED;d)移动光标至Orient OriginPoint示教机器人到Tool坐标系原点位置,按SHIFT+F5RECORD纪录(也可在记录:Approach point 1的同时记录Orient OriginPoint) ;三个接近点位置(三点之间各差90度且不能在一个平面上)6。
设置TCP点的X,Z方向;a) 将机器人的示教坐标系切换成通用坐标系;b) 示教机器人沿用户设定的+X方向至少移动250mm,按SHIFT+F5 RECORD 纪录;c) 移动光标至Orient OriginPoint,按SHIFT+ F4MOVE_TO 回到原点位置;d) 示教机器人沿用户设定的+Z方向至少移动250mm,按SHIFT+F5 RECORD 记录;e) 当记录完成,所有的UNINIT变成USED(见画面1);f) 移动光标到Orient OriginPoint;g)按SHIFT键的同时,按F4MOVE_TO使示教点回到Orient Origin Point.7.当六个点记录完成,新的工具坐标系被自动计算生成;X,Y,Z中的数据代表当前设置的TCP点相对于J6轴法兰盘中心的偏移量;W,P,R中的数据代表当前设置的工具坐标系与默认工具坐标系的旋转量如何激活工具坐标系?具体步骤如下:方法一:1)按PREV键回到画面1;2)按F5 SETING,屏幕中出现: Enter frame number:(见画面2);3)用数字键输入所需激活工具坐标系号,按ENTER 键确认;4)屏幕中将显示被激活的工具坐标系号,即当前有效工具坐标系号(见画面3).如何激活工具坐标系?具体步骤如下:方法二:1)按SHIFT+COORD键,弹出黄色对话框;2)把光标移到Tool行,用数字键输入所要激活的工具坐标系,即可。
一种机器人工具坐标系标定方法

㊀㊀机器人工具坐标系标定是计算工具端相对于机器人末端坐标系的位置和姿态的辨识过程, 该位姿是一 个未知的确定位姿。其中, 机器人末端坐标系, 是涉及到机器人控制器软件的坐标系, 可以通过控制器读取 各关节编码器值, 并经正向运动学求得机器人末端坐标系的位置和姿态。工具坐标系是定义在工具末端的 坐标系, 本文在不借助外部测量工具的条件下, 对工具坐标系相对于末端坐标系的位姿进行辨识。 在工业机器人的应用中, 机器人工具坐标系 ( T o o l C o n t r o l F r a m e , T C F ) 中的位姿是一个十分重要的因 素, 它们其测量精度依赖于实际机器人单元的几何尺寸和位置。机器人单元, 诸如末端执行器、 夹具的微小 变化都会导致机器人 T C F不准确。本文引入一种机器人 T C F标定的方法, 并用理论推算的形式表明它的合
一种机器人工具坐标系标定方法
刘成业, 李文广, 马世国, 郅健斌, 刘广亮, 吴昊
( 山东省科学院自动化研究所, 山东省机器人与制造自动化技术重点实验室, 山东 济南 2 5 0 0 1 4 )
摘要: 提出了一种算法简便、 切实有效的机器人工具坐标系标定方法。该方法基于机器人的运动学推导过程, 在没有借 助额外的测量工具的条件下, 对工具坐标系相对于机器人末端坐标系的位置进行辨识, 在得到工具坐标系相对位置的基 础上, 对机器人的工具端的姿态进行辨识。本方法仅采用了线性最小二乘算法, 算法简便容易实现。最后使用 M A T L A B 和V i r t u a l R o b o t S i m u l a t o r 对本文所提算法进行了仿真实验, 结果证明该方法切实可行, 完全可以应用到实际的工作环境 中, 缩减离线工作时间, 提高自动化水平。 关键词: 机器人运动学; 机器人建模; 工具坐标系标定; 运动学分析 中图分类号: T P 2 4 1 ㊀㊀㊀文献标识码: A ㊀㊀㊀文章编号: 1 0 0 2 4 0 2 6 ( 2 0 1 2 ) 0 1 0 0 6 9 0 6
一种工业机器人工具坐标系及零点自标定方法

一种工业机器人工具坐标系及零点自标定方法工业机器人在现代制造业中扮演着日益重要的角色,广泛应用于汽车制造、电子产品组装、物流分拣等领域。
工业机器人的工作效率和精度往往决定着生产线的整体效益,而工具坐标系及零点的准确定位则是保证工业机器人精确执行任务的基础。
本文将重点阐述一种工业机器人工具坐标系及零点自标定方法,目的在于提高工业机器人的定位精度和自动化程度。
一、工业机器人工具坐标系概述工业机器人的工作空间通常由工具坐标系和基坐标系构成。
基坐标系是机器人臂的基本参照系,而工具坐标系则是工具末端执行器(末端执行器)的参照系。
在工业机器人的日常操作中,需要根据不同的任务来切换和标定工具坐标系,以确保机器人准确地执行各项任务。
工业机器人通常通过末端执行器上的感应器和测量设备来获取工具坐标系的位置和姿态信息,以完成各种工作,如焊接、装配、搬运等。
工具坐标系的准确性和稳定性对机器人的整体性能至关重要。
二、工具坐标系的零点标定意义在实际工作中,由于各种因素的影响,工业机器人工具坐标系的参照位置和姿态可能会产生偏差,这会导致机器人在执行任务时出现误差,从而影响生产效率和产品质量。
对工具坐标系的零点进行准确定位和标定是非常必要的。
零点标定方法能够通过测量和对比真实位置信息,来修正机器人工具坐标系的位置和姿态数据,从而实现机器人的准确控制和定位。
一个稳定、准确的工具坐标系零点标定方法,可以为工业机器人的自动化生产提供坚实的基础,提高制造业的智能化水平。
三、工业机器人工具坐标系及零点自标定方法为了实现工业机器人工具坐标系及零点的自标定,可以使用以下方法:1. 利用视觉系统自动识别标定点在制造现场,通常会设置标定点用于机器人定位和标定工具坐标系。
利用先进的视觉系统和图像处理技术,可以实现机器人自动识别标定点的位置和姿态信息,从而完成工具坐标系的自标定。
这种方法不仅能够提高标定的准确性,还能大大减少人工干预,实现自动化生产。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号:1001—9944(2008)03-0001—04 基于奇异值分解的机器人工具坐标系标定 牛雪娟,刘景泰 (南开大学机器人与信息自动化研究所,天津300071)
摘要:机器人通过在末端安装不同的操作工具来完成各种作业任务,而工具参数的准确度直 接影响着机器人操作精度,因此研究一种准确、快速的工具坐标系标定方法具有重要的意 义。该文提出一种称为三点五步法的机器人工具坐标系标定方法,并基于矩阵的奇异值分解 理论对该标定方法进行了严密的数学推理,证明该标定方法理论上的可行性。采用该算法进 行工具坐标系标定具有操作简单、标定精度高、可靠性强和算法易于程序实现的特点。 关键词:奇异值分解;工具坐标系:标定 中图分类号:TP242.6 文献标志码:A
Robot Tool Control Frame Calibration Based on SVD NIU Xue-juan.LIU Jing—tai (Institute of Robotics and Information Automatic System,Nankai University,Tianjin 300071,China) Abstract:By fixing various tools on the end—effectors,robots can complete various tasks.The accurate of the tool’S parameters produce great effect on the accurate of the robot’S operation.It is very important to study a kind of TCF calibration method,which is of the property of high precision and quickness.This paper considers a practical method for TCF calibration,called three—points and five—steps method,which is proved by the algorithm based on SVD, ThrouIsh the strict reasoning,called it shows the feasibility of this method.Simple operation,hish accurate,strong reli— ability and easy programming make the method very applied. Key words:singular value decomposiIion(SVD);tool control frame(TCF);calibration
随着工业的发展,机器人的应用越来越广泛。实 际应用中.机器人是通过在末端安装不同的操作工 具来完成各种作业任务lI】。工具参数的准确度直接 影响着机器人轨迹精度,所以准确、快速的标定方法 对机器人的现场应用具有重要意义。国内外都有工 具参数标定的相关研究,其中文献【1,2]提到的标定 方法只能实现位置参数标定;文献【3]提到的标定算 法虽然能实现位姿标定。但是过程要复杂得多。 对于离线编程,必须对加工单元中的非理想状 态的工件设备进行标定。没有精确的工具坐标系标 定,即便是精度极高的机器人也无法实现对轨迹误 差要求高的离线编程任务。对于在线操作,机器人的 工具坐标系的标定也很重要,它可以使得路径点的 规划更直接、更准确。对于各种机器人避碰算法,机 器人的工具坐标系标定也是必须的。 机器人上的坐标系可以分成四类:机器人基坐
收稿日期:2007—04—25:修订日期:2oo7—10—24 . 基金项目:国家ca然科学基金资助项目(60575048);天津市ca然科学基金项目(07JCYBJC05500) 作者简介:牛雪娟(1978一),女,博士研究生,研究方向为机器人学、控制理论与控制工程;刘景泰(1964一),男,博士生导师, 研究领域为机器人学、控制理论与控制工程、自动化控制。
s动化5仪表2008(,3) ■
维普资讯 http://www.cqvip.com ji 标系(Base Frame)、末端执行器坐标系(End—effector Frame)、T具坐标系(Tool Frame)、用户坐标系(User Frame)。机器人基坐标系是一个不可设置的缺省的 坐标系,固结在机器人机座上,它是机器人运动学分 析的基本参考系。同时,机器人基坐标系还可用作通 用坐标系。作为用户坐标系的参考位置。末端执行器 坐标系。即与机器人最后一个连杆固结的坐标系,原 点位于机器人末端法兰盘中心。丁具坐标系用来定 义TCP(tool center point)的位置及1二具的姿态。用 户坐标系是用户在T作空间中自定义的坐标系,是 程序中记录的所有位置的参考坐标系。本文所说的 工具坐标系标定指的是T具坐标系相对于末端坐标 系的位姿参数的确定,即坐标变换矩阵的确定。 奇异值分解SVD广泛应用于信号的处理和图 像处理中,它作为一种通用_厂具,在解决与视觉有关 的几何问题时常用。SVD是一种强大的在最zl,2.乘 法意义下求解线性方程的线性代数方法,可以确定 在最小二乘法意义下线性方程最可能接近解
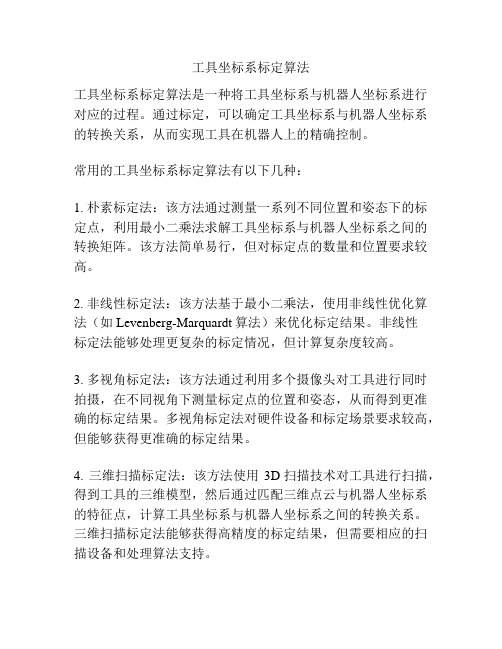
1 工具坐标系标定三点五步法 1.1 三点五步法的实验步骤 该标定方法共需要五步操作,在进行标定之前. 在机器人工作空问内选择一个机器人丁具末端比较 容易接近且表面平整的位置,在其上倒放一个锥体。 该锥体要有比较尖的顶部,最好固定在某个不动体 上,这有助于提高标定精度。该标定方法中的五步操 作都是在该锥体的顶部为参照对象.标定方法如图 1所示,标定具体步骤如下
点 步骤5 ;
步骤2
步
步 ~兰
图1 三点五步法标定示意图 Fig.1 Chart of three—DOints—five—steps calibration method 第1、2、3步操纵机器人六个关节使得工具分 别从三个不同的方向指向锥体,使工具末端TCP (tool eeFlteF point)尽量接近锥体顶部P点。调整机 器人4-6关节,使得第三个姿态下的工具系Z轴与
日
基座坐标系Z轴基本一致,工具系X轴与基座坐标 系X轴方向基本一致。分别记下在这三个位姿下, 机器人末端坐标系f6}相对于机器人基座坐标系{0}
的坐标变换阵,分别记为: ,: ,: 。 第4步将机器人的示教坐标系变换为机器人 基坐标系,这里记机器人基座坐标系为f0},操纵 机器人使机器人末端沿着f0}的X轴正向平移一段 距离(记为 ),并记录当前f6}相对T{o}的坐标变
换阵: 。 第5步操纵机器人使机器人末端沿着f0}的Z 轴正向平移一段距离(记为 ),并记录当前f6}相对
于(0}的坐标变换阵: 。 1-2三点五步法的理论基础 工具坐标系标定就是精确确定工具系f 相对
于机器人末端固结坐标系{6}的坐标变换矩阵 。
7’= =
l q 1 q l q 0 0 m13 P m23 P, m33 P: 0 1 £ 瓯£9 £ 0 1 r d /'i,d r d
0 1 其中, 0 和0 分别代表第 步时{6}和{ 相对于{0} 的坐标变换矩阵。由{0}、{6}和{ 问的变换关系,可 得变换方程:0 6 0 , {1,2,3,4,5},即: ・
£ £西 £ 0 l
“p Wiy p W/z p 0 1
ml3 q m23 q m33 q 0 1
Automation&Instrumentation 2OO8(31
维普资讯 http://www.cqvip.com 获取工具坐标系的位置信息:由三点五步法获 取数据的方法可知1 ̄3步P点重合,即pl-p: ,。标 记P点在{0}] 的坐标为(p P p ) 。由式(1),知 R,q--p ;(i=1 ̄3),可以列写方程:
[ R 23—- R l1]l; l=t 1- t2,] c2
其中: R n olx nit oir% n 0 0 ; =
[ ];p=[三 ];g=[ ]
式(2)中共含有6个方程,3个未知量,为超定 方程。对于形如Ax=b的超定方程,由于其不定性, 用通常的线性代数手段是无法求解的,需借助于最 小二乘方法,获取最小二乘意义下P点在{0}系下的 坐标p:(p P p ) ,及TCP点相对于{6}系的坐标g= (q q g ) 。 获取工具坐标系的姿态信息:由于第3—5步中 工具坐标系指向与基座坐标系一致,因此,沿基坐标 系平移相当于沿工具坐标系平移。对式(1)而言。可 在方程两边同时右乘平移矩阵,来描述机器人的相 对运动。由第3—5步的动作方式,可列写方程: f . ¨m 1:6 (3)A 【xR R ¨m,J
其中: mF[m“ m五 m r;Ax=t缸一t ;Az=t 一t ; 6=『1 0 0△ 0 Tro 式(3)中共6个方程、6个变量、为恰定方程,具 有精确解,即旋转阵的第1、3列(m。和m,)。利用旋 转阵正交性,即m:=m xm,,可以求出旋转阵的第2 列(m2)。
2基于奇异值分解标定工具坐标系 2.1 奇异值分解的基本理论 在奇异值理论中[41,任何mxn阶的矩阵 (其中 m>n)的奇异值分解表示为
= (4) 式中: 和 分别是mxm阶和n ̄n阶列正交矩阵; D=diag(al, 2, 3,…, )是对角矩阵,其对角元素为 的奇异值,并按降序排列。 不管矩阵 是否奇异,SVD分解都能做到。而 且它几乎是唯一的[41。当 为n ̄n方阵,且Rank(A)
自动化s仪表2oos(3)
:n时,所求解为准确解,否则为最小二乘解。在实际 应用中由于噪声的存在,求取 的最小二乘解是具 有很强的实用意义的。 2.2基于SVD标定工具坐标系 对式(2),令 =( 二 :],对 进行sV。分解,
如式(4),『 ,D,VI=svd(A);然后利用 、D和 求 取 的广义逆矩阵 十=VDtUy。其中D十:
{ )≠0晰利 求取方程最小二
乘解q--Atx} }。因为A为6x3矩阵,所以求出的 【tl-t3 J
q为工具坐标系原点,即TCP点在机器人末端坐标 系{6}下坐标值的最小二乘估计值。 同理,对式(3)采用奇异值分解,可以获得工具 坐标系相对于{6}系的旋转矩阵。因为方程(3)系数 矩阵为满秩方阵,故所求解为工具坐标系旋转阵的 准确解。 2.3标定算法的Matlab实现 Matlab中有专门对矩阵进行奇异值分解的函数 『 ,S,VI=svd(X),该方法虽比LU分解法、QR分解 法及迭代法等耗时,但SVD是最可靠、实用面最广 的分线性方程组求解方法。在Matlab下实现基于 SVD的工具坐标系标定,需要如下几个步骤: 首先将在三点五步法中获取的数据存为一个文 本文件,每一点对应于文件中的一行,每行包含描述 机器人末端坐标系{6}系的位姿的所有信息。 然后,利用Matlab的程序编制功能,将文本中 的数据信息读人Matlab,并对这些数据进行转换,转 换为旋转矩阵和平移矢量的格式。 最后,再根据式(2)和式(3),利用Matlab的 SVD命令求解出工具系的平移矢量和旋转矩阵。