自动控制原理传递函数知识点总结
《自动控制原理》第2章 线性系统的传递函数

+
anc(t)
=
b0
dm dtm
r(t)
+
b1
d m−1 d t m −1
r(t)
++
bm−1
d dt
r(t)
+
bmr(t)
(m n)
设r(t), c(t)及各阶导数在t=0时的值均为零(零初始条件), 则对方程两端求拉氏变换,可得系统的传递函数
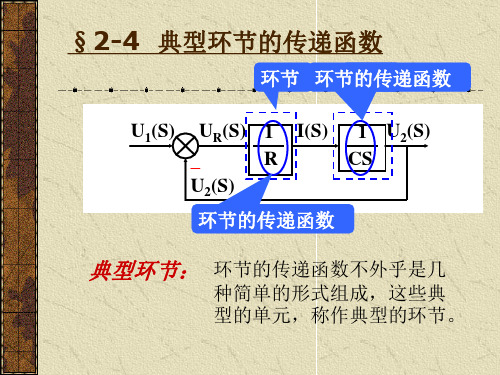
Ch2 控制系统的数学模型
◼ 传递函数的一般形式:
Ch2 控制系统的数学模型
第二章 控制系统的数学模型
Ch2 控制系统的数学模型
本章内容
❖ 引言 ❖ 物理系统的微分方程 ❖ 拉氏变换与拉氏反变换 ❖ 线性系统的传递函数 ❖ 方框图及其等效变换 ❖ 信号流图与Mason公式*
Ch2 控制系统的数学模型
2.3 线性系统的传递函数
一. 传递函数的定义
Ux(s) =
I
(s) − I2(s) sC1
(2)
I 2 (s)
=
Ux
(s) −Uo(s) R2
(3)
U o (s)
=
I 2 (s) sC2
(4)
Ch2 控制系统的数学模型
I (s) = Ui (s) −U x (s) (1) R1
Ui _
I
1/R1
Ux
Ux(s) =
I
(s) − I2(s) sC1
Uo (s)
Ui (s) (b)
I(s) Uo (s)
Ch2 控制系统的数学模型
I(s)
(c)
Uo (s)
Ui (s)
I(s)
- Uo (s) (d)
自动控制原理--传递函数的定义及性质和表示形式

传 递 函 数的表示形式
3.时间常数形式(尾1型 )
G(s)
bm (1s 1)( 2s2
an (T1s 1)(T2s2
22s 1)( is 1) 2T2s 1)(Tjs 1)
m
K bm K * am
(zi )
1 n
称 G(s)的开环增益。
传递函数
传递函数的定义及性质 传 递 函 数的表示形式
传 递 函 数的定义
对于n阶系统,线性微分方程的一般形式为:
a d n c(t) a d n1 c(t) a d c(t) a c(t)
0 dt n
dt1 n1
dt n1
n
b d m r(t) b d m1 r(t) b d r(t) b r(t)
另外实际系统总有惯性,因此实际系统中有n>=m,n称 为系统的阶数
传递函数的性质
7)传递函数是系统单位脉冲响应的Laplace变换。
定义 g(t) 为系统单位脉冲作用下的系统输出:
当 r(t) (t) 时,系统的输出c(t)称为 g(t)
此时,L[r(t)] L[ (t)] 1 所以:
C(s) G(s)R(s) G(s) c(t) g(t) L1[C(s)] L1[G(s)R(s)] L1[G(s)]
( p j )
1
i ,Tj 称时间常数。
传递函数的性质
G(s)
C(s) R(s)
b0sm a0 s n
b1sm1 a1sn1
bm1s an1s
bm an
5)传递函数的概念主要适用于单输入单输出系统。
若系统有多个输入信号,在求传递函数时,除了一
大学自动控制原理2.4典型环节传递函数
传递函数的零点和极点决定了系统的动态特性和稳定性。
03
传递函数的分子和分母多项式决定了系统的频率响应特性。
典型环节的分类
比例环节
输出信号与输入信号成正比,传递函 数为 G(s) = K,其中 K 为常数。
02
积分环节
输出信号与输入信号的时间积分成正 比,传递函数为 G(s) = 1 / (sT),其 中 T 为时间常数。
将介绍控制系统的稳定性 分析方法。
掌握频率响应法在控制系 统设计中的应用。
学习如何利用根轨迹法进 行系统性能分析。
了解现代控制系统的基本 概念和分类。
THANKS FOR WATCHING
感谢您的观看
高阶环节的传递函数具有多个极点和零点,这些极点和零点 决定了环节的动态特性,如响应速度、超调和调节时间等。
实例分析
以一个三阶惯性环节为例,其传递函数为 $G(s) = frac{1}{s^3 + 2s^2 + 3s + 1}$,该环节具有三个极点 $s = -1, -1, -1$ 和一个 零点 $s = 0$。
拉普拉斯变换中的频率。
该传递函数是一个有理分式,分 母为线性多项式,分子为常数。
当输入信号 (s) 变化时,输出信 号 (G(s)) 会根据增益 (K) 和时间
常数 (T) 进行相应的变化。
实例分析
实例1
一阶惯性环节在电机控制系统中的应用,用于描述电机的动态响应特性。
实例2
在温度控制系统中的一阶惯性环节,用于描述加热元件的热量传递和散热过程。
04 一阶惯环节
定义与特点
定义
一阶惯性环节的传递函数为 (G(s) = frac{K}{T s + 1}),其中 (K) 是增益,(T) 是时间常 数。
自动控制原理传递函数

y(t) y kt
S平面 j
x(t) 1(t)
0
t
0 Re
有一个0值极点。在图中极点用“ ”表示,零点用“ ”
表示。K表示比例系数,T称为时间常数。
3/18/2024 2:47:29 AM
20
积分环节实例
积分环节实例:
①
C
R
ui
ui (s) uo (s)
R
1 Cs
uo
uo (s) 1
LCs 2
1 RCs
1
3/18/2024 2:47:28 AM
2
传递函数的定义: 系统初始条件为零时,输出变量的拉普拉
斯变换与输入变量的拉普拉斯变换之比,称为 系统的传递函数。 记做: Y (s) G(s) 或 Y (s) G(s)U (s)
U (s)
U(s)
Y(s)
G(s)
3/18/2024 2:47:28 AM
R2 I2 (s) UO (s)
G(s) U0 (s) 1 1 Ts Ui (s) 1 Ts
T R1R2C R1 R2
R1 R2
R2
3/18/2024 2:47:28 AM
7
复习拉氏变换
②性质:
⑴线性性质:L[f1(t) f2 (t)] F1(s) F2 (s)
⑵微分定理:L[ f (t)] sF (s) f (0)
L[ f(t)] s2F (s) sf (0) f (0)
L[ f (n) (t)] sn F (s) sn1 f (0) sn2 f (0) ... f (n1) (0)
⑶积分定理:(设初值为零)
L[
f
(t)dt]
F (s) s
⑷时滞定理:L[ f (t T )] est f (t T )dt esT f (s) 0
《自控原理》典型环节的传递函数
1 T2S2+2ξTS +1
C(S)
七、二阶微分环节
d2r(t) dr(t) 2 + r(t) =c(t) 1.微分方程: 微分方程: 微分方程 τ + 2ξτ 2 dt dt
τ:环节的时间常数;ξ:阻尼比。
2.传递函数: 传递函数: 传递函数
G ( s ) = τ S + 2ξτS + 1
C(S)
三、微分环节
1.微分方程: 微分方程: 微分方程 2.特点: 特点: 特点 c(t) = dr(t) dt
输出对输入信号在时间上的微分, 输出对输入信号在时间上的微分, 即输出量与输入量的变化率成正比。 即输出量与输入量的变化率成正比。
3.传递函数: 传递函数: 传递函数
G(S)= S
R(S) C(S)
4.结构图: 结构图: 结构图 R(S)
1 TS+1
C(S)
五、一阶微分环节
dr(t) 1.微分方程: c(t)=τ dt + r(t) 微分方程: 微分方程 τ :一阶微分环节的时间常数 2.特点: 特点: 特点 3.传递函数: 传递函数: 传递函数 输入延迟地反应输出量的变化规律。 输入延迟地反应输出量的变化规律。
1 G(S)= 4、惯性环节: 、惯性环节: TS+1 5、一阶微分环节: G(S)= τS+1 、一阶微分环节: ω2n 6、二阶振荡环节: G(S)= 2 、二阶振荡环节: S +2 ξωnS+ω2n ω 7、二阶微分环节: G ( s ) = τ 2 S 2 + 2ξτS + 1 、二阶微分环节: τ G(S)=e-τs 8、延迟环节: 、延迟环节:
自动控制原理知识点
自动控制原理知识点自动控制原理是探讨如何利用各种力量和手段来控制和调节物体或者系统的运行状态的学科。
它是现代科学技术以及工程实践的重要基础,广泛应用于机械、电气、化工、航空航天等领域。
下面将详细介绍自动控制原理的几个重要知识点。
1.控制系统的组成和基本原理控制系统由输入、处理器、输出和反馈四个基本部分组成。
输入是所要控制的物理量或信号,处理器是处理输入信号的部分,输出是系统输出的目标物理量或信号,反馈将输出信号与输入信号进行比较并反馈给处理器进行调节。
控制系统的基本原理是通过调节输入信号,通过反馈来使系统的输出达到期望值。
2.传递函数和状态空间法传递函数是描述线性系统输入输出关系的函数,它是一个复变量的函数。
通过传递函数可以对系统的动态特性进行分析和设计。
状态空间法是一种描述系统行为的方法,用状态向量和状态方程来描述系统的动态特性和稳定性。
3.PID控制器PID控制器是最常见的一种控制器,它由比例(P)、积分(I)和微分(D)三个部分组成。
比例部分使控制器的输出与误差成正比,积分部分用于处理系统的静差,微分部分用于预测系统未来的状态。
通过调节PID控制器的参数,可以实现系统的稳定性和响应速度的优化。
4.反馈控制反馈控制是将系统的输出信号反馈给系统的输入端进行调节的一种控制方式。
反馈控制可以使系统对扰动具有一定的鲁棒性,能够提高系统的稳定性和减小误差。
5.系统稳定性和瞬态响应系统稳定性是指当系统输入和参数在一定范围内变化时,系统输出是否会有无穷大的增长。
常用的判断系统稳定性的方法有稳定判据和根轨迹法。
瞬态响应是系统在调节过程中输出的变化过程,包括超调量、调节时间、稳态误差等指标。
6.系统优化和自适应控制系统优化是指通过调节系统参数使系统达到最佳性能的过程。
自适应控制是指系统能够根据外部环境和内部参数的变化自主调整控制策略的过程。
优化和自适应控制可以使系统具有更好的鲁棒性和适应能力。
7.数字控制系统数字控制系统是利用数字计算和逻辑运算进行控制的一种控制方式。
自动控制原理传递函数

自动控制原理传递函数
自动控制原理中,传递函数是一个非常重要的概念。
传递函数描述了控制系统
输入和输出之间的关系,是分析和设计控制系统的重要工具。
本文将介绍传递函数的基本概念、性质和应用。
传递函数是描述线性时不变系统输入和输出之间关系的数学函数。
对于一个线
性时不变系统,其传递函数可以用拉普拉斯变换表示。
传递函数通常用G(s)表示,其中s是复变量。
传递函数的形式可以是分子多项式除以分母多项式的比值,也可
以是一些特定形式的函数。
传递函数的性质包括,稳定性、因果性、实数性等。
稳定性是指系统在输入有
界的情况下,输出也是有界的。
因果性是指系统的输出只依赖于当前和过去的输入,而不依赖于未来的输入。
实数性是指系统的传递函数在实轴上的取值都是实数。
传递函数在控制系统分析和设计中有着广泛的应用。
通过传递函数,可以方便
地分析系统的频率响应特性,如幅频特性、相频特性等。
同时,传递函数也可以用于控制系统的设计,例如根据要求设计控制器的参数,使系统的性能满足特定的要求。
在实际工程中,传递函数也经常用于建立系统的数学模型。
通过测量系统的输
入和输出,可以辨识出系统的传递函数,从而对系统进行建模和仿真。
这对于系统的分析和预测具有重要意义。
总之,传递函数是自动控制原理中一个非常重要的概念。
通过传递函数,可以
方便地描述和分析控制系统的性能,并且可以用于控制系统的设计和建模。
因此,对传递函数的理解和掌握是控制工程师必备的基本能力之一。
希望本文对传递函数的基本概念、性质和应用有所帮助。
6、自动控制原理-传递函数
得到系统(或环节)传递函数的一般形式
X o ( s) bm s bm1s b1s b0 G( s) X i ( s) an s n an 1s n 1 a1s a0
m
由此可知,只要知道系统微分方程,就可求出其传递函数。
即
Lxo (t ) X o (s) G ( s) Lxi (t ) X i (s)
例题2 求图示简单阻容电路的传递函数。 R 解:电路方程为
1 ui (t ) R i (t ) i (t ) dt C ui (t) 1 uo (t ) i (t ) dt C duo (t ) RC uo (t ) ui (t ) dt
i(t) C
耗能元件
因此传递函数的零、极点分布图也表征了系统的
动态性能。
8、只能反映零初始条件下输入信号引起的输出, 不能反映非零初始条件引起的输出。
5/23/2016 10:28:37 PM
19
传递函数的表示方式
1、有理分式形式
传递函数最常用的形式是下列有理分式形式
N ( a1s a0 D(s)
为系统的时间常数。
K k
( zi ) ( p j )
j 1 i 1 n
m
23
传递函数:
U c ( s) 1 G( s ) U r ( s ) LCs 2 RCs 1
[例4] 求下图的传递函数
C i1
1 i1dt R1i1 R1i2 0 C
R2
ui
R1 i2
uO
R1i2 R1i1 R2 i2 ui R2 i2 uO
(
1 R1 ) I1 ( s ) R1 I 2 ( s ) 0 Cs
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制原理传递函数知识点总结自动控制原理是研究自动控制系统中信号传递、处理、转换等基本理论和方法的学科。
传递函数是描述线性时不变系统的数学模型,它对于分析和设计控制系统起着重要的作用。
下面将对自动控制原理中关于传递函数的知识点进行总结。
一、传递函数的定义
传递函数是用来描述线性时不变系统输入-输出关系的数学函数。
对于连续时间系统,传递函数可以表示为:
G(s) = Y(s) / X(s)
其中,G(s)为传递函数,Y(s)为系统的输出信号,X(s)为系统的输入信号,s为复变量。
对于离散时间系统,传递函数可以表示为:
G(z) = Y(z) / X(z)
其中,G(z)为传递函数,Y(z)为系统的输出信号,X(z)为系统的输入信号,z为复变量。
二、传递函数的性质
1. 时域特性:传递函数可以通过拉氏变换将时域的微分、积分方程转换为频域的代数方程,从而简化系统的分析和设计。
2. 稳定性:传递函数的稳定性与其极点位置有关。
当所有极点均位于左半平面时,传递函数是稳定的;当存在极点位于右半平面时,传递函数是不稳定的。
3. 零点和极点:传递函数的零点是使得传递函数为零的点,极点是使得传递函数无穷大的点。
零点和极点的位置对系统的动态性能和稳定性有重要影响。
4. 频率响应:传递函数的频率响应是指系统对不同频率输入信号的响应特性。
频率响应可以通过传递函数的频域分析获得,包括幅频特性和相频特性。
三、传递函数的常见形式
1. 一阶系统传递函数:一阶系统的传递函数形式为:
G(s) = K / (s + a)
其中,K为传递函数的增益,a为系统的时间常数。
2. 二阶系统传递函数:二阶系统的传递函数形式为:
G(s) = K / (s^2 + 2ζω_ns + ω_n^2)
其中,K为传递函数的增益,ζ为阻尼比,ω_n为自然频率。
3. 传递函数的因果性:因果系统的传递函数在复平面上的极点全部位于左半平面,即Re(s) < 0。
非因果系统的传递函数在复平面上的极点存在于右半平面,即Re(s) > 0。
4. 单位反馈传递函数:单位反馈传递函数是指系统输入信号与输出信号之间的关系。
单位反馈传递函数通常用于分析系统的稳定性和动态性能。
四、传递函数的应用
传递函数在自动控制原理中具有广泛的应用。
通过传递函数可以对系统的稳定性、动态特性、频率响应等进行分析,从而进行控制系统的设计和优化。
传递函数在控制系统中常用于系统建模、控制器设计和性能评估等方面。
综上所述,传递函数是自动控制原理中重要的数学概念,用于描述线性时不变系统的输入-输出关系。
传递函数的性质、形式和应用对于控制系统的设计和分析具有重要意义。
深入理解和掌握传递函数的相关知识,对于工程实践和学术研究都具有重要价值。