《自动控制原理》第2章 线性系统的传递函数
合集下载
自动控制原理第二章

4
解析法:依据系统及元件各变量之间所遵 循的物理、化学定律列写出变量间的数学表 达式,并实验验证。适用于简单、典型、常见的
系统,
实验法:对系统或元件输入一定形式的信 号(阶跃信号、单位脉冲信号、正弦信号 等),根据系统或元件的输出响应,经过数 据处理而辨识出系统的数学模型。适用于复杂、
非常见的系统。 实际上常常是把这两种方法结合起来建立数学模型更为有效。
许多情况下传递函数是能完全反映系统的动 态性能的 。
20
一、传递函数的概念与定义
Ur(s)
G(s)
Uc(s)
U c( s ) G( s ) U r( s )
21
二、关于传递函数的几点说明
传递函数仅适用于线性定常系统,否则无法用 拉氏变换导出; 传递函数完全取决于系统内部的结构、参数, 而与输入、输出无关; 传递函数只表明一个特定的输入、输出关系, 对于多输入、多输出系统来说没有统一的传递 函数;(可定义传递函数矩阵,见第九章)
L
R i
ui
C
uc
24
解:为了改善系统的性能,常引入图示的无源网络 作为校正元件。无源网络通常由电阻、电容、电感 组成,利用电路理论可方便地求出其动态方程,对 其进行拉氏变换即可求出传递函数。这里用直接求 的方法。因为电阻、电容、电感的复阻抗分别为R、 1∕Cs、Ls,它们的串并联运算关系类同电阻。
式中:T为时间常数, 为阻尼系数。 ⑦二阶微分环节,传递函数为
2 2
1 G(s) 2 2 T s 2 Ts 1
式中: 为时间常数, 为阻尼系数 此外,还经常遇到一种延迟环节,设延迟时间 为 ,该环节的传递函数为:
G(s) s 2 s 1
解析法:依据系统及元件各变量之间所遵 循的物理、化学定律列写出变量间的数学表 达式,并实验验证。适用于简单、典型、常见的
系统,
实验法:对系统或元件输入一定形式的信 号(阶跃信号、单位脉冲信号、正弦信号 等),根据系统或元件的输出响应,经过数 据处理而辨识出系统的数学模型。适用于复杂、
非常见的系统。 实际上常常是把这两种方法结合起来建立数学模型更为有效。
许多情况下传递函数是能完全反映系统的动 态性能的 。
20
一、传递函数的概念与定义
Ur(s)
G(s)
Uc(s)
U c( s ) G( s ) U r( s )
21
二、关于传递函数的几点说明
传递函数仅适用于线性定常系统,否则无法用 拉氏变换导出; 传递函数完全取决于系统内部的结构、参数, 而与输入、输出无关; 传递函数只表明一个特定的输入、输出关系, 对于多输入、多输出系统来说没有统一的传递 函数;(可定义传递函数矩阵,见第九章)
L
R i
ui
C
uc
24
解:为了改善系统的性能,常引入图示的无源网络 作为校正元件。无源网络通常由电阻、电容、电感 组成,利用电路理论可方便地求出其动态方程,对 其进行拉氏变换即可求出传递函数。这里用直接求 的方法。因为电阻、电容、电感的复阻抗分别为R、 1∕Cs、Ls,它们的串并联运算关系类同电阻。
式中:T为时间常数, 为阻尼系数。 ⑦二阶微分环节,传递函数为
2 2
1 G(s) 2 2 T s 2 Ts 1
式中: 为时间常数, 为阻尼系数 此外,还经常遇到一种延迟环节,设延迟时间 为 ,该环节的传递函数为:
G(s) s 2 s 1
自动控制原理(第三版)第2章控制系统的数学模型(2)

大连民族学院机电信息工程学院
自动控制原理
第二章 控制系统的数学模型
求取该电路在单位阶跃输入时的响应。 U c ( s) 1 G( s ) T RC U r ( s ) Ts 1
ur 1( t )
方法1
U c ( s ) G( s )U r ( s )
1
U r (s)
1 s
方法2
1 (Ts 1) s
1 t 1 g (t ) 1[G ( s)] e T T t uc (t ) g (t )ur ( )d
0 1 1 ( t ) t t 1 T 1 T e d e e T d 0T 0 T t
1 uc (t ) L [ ] (Ts 1) s T 1 1 1 L ( )L ( ) s Ts 1 1 e
大连民族学院机电信息工程学院
自动控制原理
第二章 控制系统的数学模型
传递函数的求法
例2-1 方法一 R-L-C串联电路
d 2 uc ( t ) R duc ( t ) 1 1 uc ( t ) ur ( t ) 2 dt L dt LC LC传递Fra bibliotek数: G( s)
U c ( s) 1 U r ( s) LCs 2 RCs 1
大连民族学院机电信息工程学院
自动控制原理
第二章 控制系统的数学模型
零、极点分布图
传递函数的零、极点分 布图: 将传递函数的零、 极点表示在复平面上的 图形。
零点用“o”表示 极点用“×”表示
j
1 -3 -2
-1
s2 G( s) = ( s 3)( s 2 2s 2)
大连民族学院机电信息工程学院
自动控制原理
第二章 控制系统的数学模型
求取该电路在单位阶跃输入时的响应。 U c ( s) 1 G( s ) T RC U r ( s ) Ts 1
ur 1( t )
方法1
U c ( s ) G( s )U r ( s )
1
U r (s)
1 s
方法2
1 (Ts 1) s
1 t 1 g (t ) 1[G ( s)] e T T t uc (t ) g (t )ur ( )d
0 1 1 ( t ) t t 1 T 1 T e d e e T d 0T 0 T t
1 uc (t ) L [ ] (Ts 1) s T 1 1 1 L ( )L ( ) s Ts 1 1 e
大连民族学院机电信息工程学院
自动控制原理
第二章 控制系统的数学模型
传递函数的求法
例2-1 方法一 R-L-C串联电路
d 2 uc ( t ) R duc ( t ) 1 1 uc ( t ) ur ( t ) 2 dt L dt LC LC传递Fra bibliotek数: G( s)
U c ( s) 1 U r ( s) LCs 2 RCs 1
大连民族学院机电信息工程学院
自动控制原理
第二章 控制系统的数学模型
零、极点分布图
传递函数的零、极点分 布图: 将传递函数的零、 极点表示在复平面上的 图形。
零点用“o”表示 极点用“×”表示
j
1 -3 -2
-1
s2 G( s) = ( s 3)( s 2 2s 2)
大连民族学院机电信息工程学院
自动控制原理第二节传递函数
令M c ( s ) = 0 ,得转速对电枢电压的传递函数: Ku Ω( s ) Gu ( s ) = = U a ( s ) TaTm s 2 + Tm s + 1 令 U a ( s ) = 0 ,得转速对负载力矩的传递函数: − K m (Ta s + 1) Ω( s ) Gm ( s ) = = M c ( s ) TaTm s 2 + Tm s + 1 最后利用叠加原理得转速表示为: Ω( s ) = Gu ( s )U a ( s ) + Gm ( s ) M c ( s )
②
R C
ui
uo
ui ( s ) u o ( s ) u o ( s ) 1 Q = ,∴ = 1 1 R + Cs ui ( s ) RCs + 1 Cs
12/24/2010 1:04:05 AM
16
振荡环节
(四)振荡环节: 时域方程: 2 y '' (t ) + a1 y ' (t ) + a0 y (t ) = b0 x(t ) a 传递函数: ( s ) = G
1 1 = 2 2 ( T1 s + 1)( T 2 s + 1) T s + 2 ξ Ts + 1
p1 ,− p2
p1、p2
或 T、T2 求得; 1 9
12/24/2010 1:04:04 AM
传递函数的表现形式
若有零值极点,则传递函数的通式可以写成:
G ( s) = Kg sυ × ( s + zi ) Π ( s 2 + 2ξ kω k s + ω k2 ) Π
∏ (τ s +)
自动控制原理第二章梅森公式-信号流图课件
ABCD
然后,通过分析梅森公式 的各项系数,确定系统的 极点和零点。
最后,将梅森公式的分析 结果转换为信号流图,进 一步明确系统各变量之间 的传递关系。
梅森公式在信号流图中的应用实例
假设一个控制系统的传递函数为 (G(s) = frac{s^2 + 2s + 5}{s^2 + 3s + 2})
在信号流图中,将极点和零点表示为相 应的节点,并根据梅森公式的各项系数 确定各节点之间的传递关系。
02
信号流图基础
信号流图定义与构成
信号流图定义
信号流图是一种用于描述线性动 态系统数学模型的图形表示方法 ,通过节点和支路表示系统中的 信号传递和转换过程。
信号流图构成
信号流图由节点和支路组成,节 点表示系统的动态方程,支路表 示输入输出之间的关系。
信号流图的绘制方法
确定系统动态方程
根据系统描述,列出系统的动态方程。
2
梅森公式与信号流图在描述和分析线性时不变系 统时具有互补性,二者可以相互转换。
3
信号流图能够直观地表示系统各变量之间的传递 关系,而梅森公式则提供了对系统频率特性的分 析手段。
如何使用梅森公式进行信号流图分析
首先,将系统的传递函数 转换为梅森公式的形式。
根据极点和零点的位置, 判断系统的稳定性、频率 响应特性等。
在未来研究中的可能发展方向
随着科技的不断进步和应用需求的不断变化,控制系统面临着越来越多的 挑战和机遇。
在未来研究中,可以利用梅森公式和信号流图进一步探索复杂系统的分析 和设计方法,提高系统的性能和稳定性。
同时,随着人工智能和大数据技术的应用,可以结合这些技术对控制系统 进行智能化分析和优化设计,提高系统的自适应和学习能力。
自动控制原理课件 第二章 线性系统的数学模型
c(t ) e
dt Leabharlann t
c( s )
g ( ) r ( ) d e s ( ) d 0 0 g ( )e s r ( )e s d d 0 0
0
g ( )e
5) 闭环系统传递函数G(s)的分母并令其为0,就是系统的特征方 程。
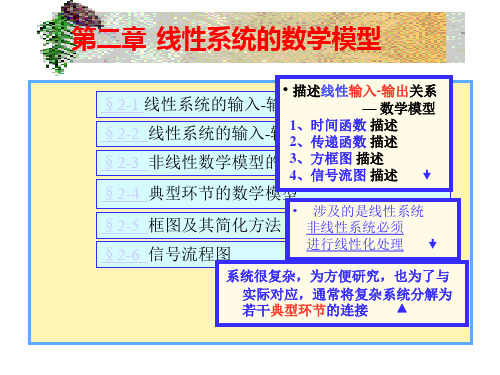
• 涉及的是线性系统 非线性系统必须 进行线性化处理
§2-6 信号流程图
系统很复杂,为方便研究,也为了与 实际对应,通常将复杂系统分解为 若干典型环节的连接
数学模型的定义 数学模型: 描述系统变量间相互关系的动态性能的运动方程 建立数学模型的方法:
解析法: 依据系统及元件各变量之间所遵循的物理或化学规律列写出相 应的数学关系式,建立模型。 自动控制系统的组成可以是电气的,机械的,液压的,气动的等等,然 而描述这些系统的数学模型却可以是相同的。因此,通过数学模型来研 究自动控制系统,就摆脱了各种类型系统的外部关系而抓住这些系统的 共同运动规律,控制系统的数学模型是通过物理学,化学,生物学等定 律来描述的,如机械系统的牛顿定律,电气系统的克希霍夫定律等都是 用来描述系统模型的基本定律。 实验法: 人为地对系统施加某种测试信号,记录其输出响应,并用适当 的数学模型进行逼近。这种方法也称为系统辨识。 数学模型的形式 时间域: 复数域: 频率域: 微分方程 差分方程 传递函数 结构图 频率特性 状态方程
1 例1 : F ( s) ( s 1)(s 2)(s 3) c c c 1 2 3 s 1 s 2 s 3
1 1 c1 [ ( s 1)]s 1 ( s 1)(s 2)(s 3) 6 1 1 c2 [ ( s 2)]s 2 ( s 1)(s 2)(s 3) 15 1 1 c3 [ ( s 3)]s 3 ( s 1)(s 2)(s 3) 10 1 1 1 1 1 1 F ( s) 6 s 1 15 s 2 10 s 3 1 1 1 f (t ) e t e 2t e 3t 6 15 10
《自动控制原理》第二章传递函数
G2 ( s ) N ( s) 1 + G1 ( s)G 2 ( s) H ( s)
∑ C ( s ) = Φ ( s) R( s) + Φ ( s) N ( s) =
G2 ( s )[G1 ( s) R ( s) + N ( s )] 1 + G1 ( s)G 2 ( s ) H ( s)
20
N ( s)
14
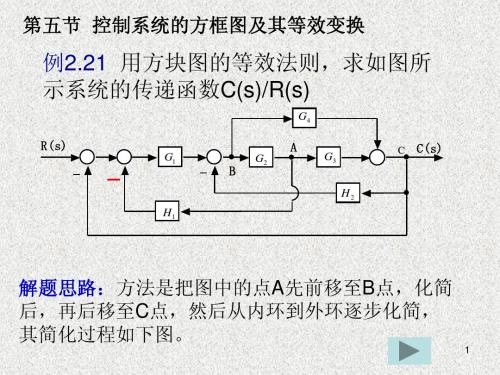
例2.23
R(s)
G4 G1 A G3 H2 H1
C
p1 = G1G2G3
_
-
B
G2
C (s)
∆1 = 1
L1 = −G1 G 2 H 1
p2 = G1G4
∆2 = 1
L2 = − G 2 G 3 H 2 L3 = −G 1 G 2 G3
L4 = − G 4 H 2
注意:回路 注意: 找不全是最 大的问题
5
1 R 1 G1 -1 1 G2 -1 1 G3 -1 K C
1
-1
•前向通路:开始于输入节点,沿支路箭头方向,每个节点 前向通路:开始于输入节点,沿支路箭头方向, 前向通路 只经过一次,最终到达输出节点的通路称之前向通路。 只经过一次,最终到达输出节点的通路称之前向通路。 •回路:起点和终点在同一节点,并与其它节点相遇仅一次的通路。 回路:起点和终点在同一节点,并与其它节点相遇仅一次的通路。 回路 •回路中所有支路的乘积称为回路增益。 回路中所有支路的乘积称为回路增益。 回路中所有支路的乘积称为回路增益 •不接触回路:回路之间没有公共节点时, 不接触回路:回路之间没有公共节点时, 不接触回路 不接触回路。 这种回路叫做 不接触回路。 •在信号流图中,可以有两个或两个以上不接触回路。 在信号流图中, 在信号流图中 可以有两个或两个以上不接触回路。
自动控制原理 线性系统的数学模型传递函数
(5)传递函数分母多项式的阶次总是大于或等于分子
多项式的阶次,即n≥m。这是由于实际系统的惯性
所造成的。系数为实数。
6/47
§2.3 传递函数
(6)传递函数与微分方程有相通性。把微分方程
中的
d dt
用s代替就可以得到对应的传递函数。
(7)传递函数G(s)的拉氏反变换是脉冲响应g(t)。
(8)传递函数分母多项式称为特征多项式,记为
K1 R
14/47
§2.3 传递函数
3. 积分环节
输出量正比于输入量的积分的环节称为积分 环节,其动态特性方程:
c(t) 1
t
r(t)dt
Ti 0
其传递函数: G(s) C(s) 1 R(s) Ti s
式中Ti为积分时间常数。
15/47
§2.3 传递函数
积分环节的单位阶跃响应为: C(t) 1 t Ti
§2.3 传递函数
4. 微分环节
理想微分环节的特征输出量正比于输入量的
微分,其动态方程
c(t)
Td
dr(t) dt
其传递函数
G(s)
C(s) R(s)
Td
s
式中Td称微分时间常数
它的单位阶跃响应曲线 c(t) Td (t)
它随时间直线增长,当输入突然消失,积分停止, 输出维持不变,故积分环节具有记忆功能,如图所 示。
16/47
§2.3 传递函数
上图为运算放大器构成的积分环节,输入ui(t),输 出u0(t),其传递函数为
G(s) U0 (s) 1 1 Ui (s) RCs Ti s
式中Ti = RC
17/47
9/47
§2.3 传递函数
2.2.3 典型环节的传递函数
自动控制原理2.3 传递函数1.3 传递函数
U a (s) TaTm s 2 Tm K 0 s 1
1 K0
1 K0
(s) Mc (s)
Km 1 K0
(Ta
s
1)
TaTm s 2 Tm K 0 s 1
1 K0
1 K0
2.性质与说明:
(1)传递函数是复变量s的有理真分式,具有复变
函数的所有性质,且所有系数均为实数。
a1
d n1c(t) dt n1
an1
dc(t ) dt
a n c(t )
b0
d mr(t) dt m
b1
d m1r(t) dt m1
bm1
dr (t ) dt
bm r(t)
当初始条件为零时有:
[a0 s n a1s n1 an1s an ]C(s)
一、基本概念:
第二章 数学模型
以 RC 网络为例。
R
RC
duc dt
uc
ur,设
uc (0)
0
C
则有 RCsUc (s) Uc (s) Ur (s)
ur i
uc
即(RCs 1)Uc (s) Ur (s)
Uc (s)
1 RCs
1
U
r
(
s)。
其中 Ur (s)随
ur (t) 形式而变,
号的性质和能力,故称它为RC网络的传函。
1、定义:对于线性定常系统来说,当初始条件为零 时,输入量拉氏变换与输出量拉氏变换之 比叫做系统的传递函数 。
G(s) C(s) . R(s) R(s)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
+
anc(t)
=
b0
dm dtm
r(t)
+
b1
d m−1 d t m −1
r(t)
++
bm−1
d dt
r(t)
+
bmr(t)
(m n)
设r(t), c(t)及各阶导数在t=0时的值均为零(零初始条件), 则对方程两端求拉氏变换,可得系统的传递函数
Ch2 控制系统的数学模型
◼ 传递函数的一般形式:
Ch2 控制系统的数学模型
第二章 控制系统的数学模型
Ch2 控制系统的数学模型
本章内容
❖ 引言 ❖ 物理系统的微分方程 ❖ 拉氏变换与拉氏反变换 ❖ 线性系统的传递函数 ❖ 方框图及其等效变换 ❖ 信号流图与Mason公式*
Ch2 控制系统的数学模型
2.3 线性系统的传递函数
一. 传递函数的定义
Ux(s) =
I
(s) − I2(s) sC1
(2)
I 2 (s)
=
Ux
(s) −Uo(s) R2
(3)
U o (s)
=
I 2 (s) sC2
(4)
Ch2 控制系统的数学模型
I (s) = Ui (s) −U x (s) (1) R1
Ui _
I
1/R1
Ux
Ux(s) =
I
(s) − I2(s) sC1
Uo (s)
Ui (s) (b)
I(s) Uo (s)
Ch2 控制系统的数学模型
I(s)
(c)
Uo (s)
Ui (s)
I(s)
- Uo (s) (d)
Uo (s)
Ch2 控制系统的数学模型
例2:画出两级RC电路网络的系统方框图。
i R1
Ux R2 i2
设中间变量Ux
u1
Ui
C1
↓i1 C2
Uo
I (s) = Ui (s) −U x (s) (1) R1
R(s)
C(s) sys
定义:零初始条件下,系统输出量的拉氏变 换与输入量的拉氏变换的比值,用G(s)表示。
G(s) = C(s) s = + j
R(s)
Ch2 控制系统的数学模型
◼ 线性常微分方程一般形式:
a0
dn dtn
c(t)
+
a1
d n−1 d t n −1
c(t)
++
an−1
d dt
c(t)
Ch2 控制系统的数学模型
4、积分环节 5、微分环节
G(s) = 1 s
纯微分: G(s)=τs
一阶微分: G(s)=τs+1
二阶微分: G(s)=τ2s2+2ζτs+1
Ch2 控制系统的数学模型
6、延迟环节
运动方程: U0 (t) = Ui (t)(t − ) 传递函数: G(s) = e−s
实例:管道压力、流量等物理量的控制
当延迟时间τ很小时,
e−s 1
1 + s
Ch2 控制系统的数学模型
2.4 控制系统的方框图
一. 方框图的组成
1、方框:表示一个系统、元件、环节。
2、信号线:带有箭头的直线,表示信号的流向。 直线旁标示信号的时间函数或象函数(复域函数)。
Ch2 控制系统的数学模型
典型负反馈控制系统方框图如图:
R(s)
Gc (s)
−
N (s)
C(s)
Gp (s)
B(s)
H (s)
Ch2 控制系统的数学模型
Gc(s):控制器传递函数 Gp(s):被控对象传递函数 H(s) :反馈通路传递函数 R(s) :系统输入 C(s) :系统输出 N(s) :扰动
Ch2 控制系统的数学模型
C(S)
3:反馈
R(s)
G(s) = G1(s) 1 G1(s)G2 (s)
R(s)
1、前向通路传递函数 假设N(s)=0,R(s)→C(s) Gc(s) Gp(s)
2、开环传递函数(令N(s)=0 )打开主反馈 B(s)/E(s)
=Gc(s) Gp(s) H(s)
Ch2 控制系统的数学模型
3、闭环传递函数(N(s)=0)
前向通路传递函数 (s) = 1+ 开环传递函数
(s) = C(s) = Gc(s)Gp(s) R(s) 1+ Gc(s)Gp(s)H (s)
3、比较点: 对多个信号进行加、减运算。
(默认是加号,负号必须标出)
R1(s)
R1(s) − R2(s)
- (负号必须标出)
R2 (s)
Ch2 控制系统的数学模型
4、引出点(分支点):表示信号引出的位置。
P(s)
注意:同一位置引出的信号
大小和性质完全一样。
Ch2 控制系统的数学模型
二. 相关概念
Ch2 控制系统的数学模型
6、N(s)为输入,E(s)为输出的误差传递函数 (假设R(s)=0)
EN
(s)
=
E(s) N (s)
=
− Gp(s)H (s) 1+ Gc(s)Gp(s)H (s)
7、当输入R(s)与扰动N(s)同时作用于系统时, 求传递函数的代数和。
三. 方框图的绘制方法
Ch2 控制系统的数学模型
G(s)
=
Uc(s) Ur(s)
=
LCs2
1 + RCs +1
Ch2 控制系统的数学模型
解法二:复数阻抗法
Ur(s)
Zc(s)
= Uc(s)
ZR (s) + Zc(s) + Zl (s)
代入
Uc(s) Ur(s)
=
LCs2
1 + RCs
+1
五.典型环节的传递函数
1、比例环节 运动方程 : y(t)=k x(t) 传递函数: G(s)=k
R(s) (s +1)(s + 2)
e−t , e−2t
z1 = −3, p1 = −1, p2 = −2
r(t) = R1 &)
= 9R1 − R2e−5t + (3R2 −12R1)e−t + (3R1 − 2R2 )e−2t
前两项具有与输入函数相同的运动模态,后两项包含 了由极点形成的自由运动模态。
零点:不形成自由运动的模态,但影响各模态在响应 中所占的比重,因而影响曲线的形状。
Ch2 控制系统的数学模型
四.典型元件的传递函数
1、电位器: [五版P34 图2-10a]
G(s) = U (s) = k ( s )
2、电阻:
U (s) Z R (s) = I (s) = R
2、电阻: 3、电容: 4、电感:
=
i(t)dt
c
进行拉氏变换得: I (s) = Ui (s) −Uo (s) (1) R
Uo (s)
=
I (s) sC
(2)
I (s) = Ui (s) −Uo (s) (1) R
I (s) Uo (s) = sC (2)
I(s)
(c)
Ch2 控制系统的数学模型
Ui (s)
I(s)
(b)
Uo (s)
(s + 3)(s +1+ j)(s +1− j)
Ch2 控制系统的数学模型
◼ 零点和极点对输出的影响
极点:微分方程的特征根,决定了所描述系统自由运 动的模态。
例 G(s) = C(s) = 6(s + 3) 自由运动的模态:
R(s) (s +1)(s + 2)
e−t , e−2t
z1 = −3, p1 = −1, p2 = −2
Ch2 控制系统的数学模型
4、输出对扰动的闭环传递函数(假设R(s)=0)
C(s)
Gp(s)
N (s) = N (s) = 1+ Gc(s)Gp(s)H (s)
5、R(s)为输入,E(s)为输出的误差传递函数 (假设N(s)=0)
E (s)
=
E(s) R(s)
=
1 1+ Gc(s)Gp(s)H (s)
z2)(s − zm) p2 )(s − pn )
m
(s − zi )
= K
i =1 n
(s − pj)
首1标准型,根轨迹法中常用
K*=b0/a0:传递函数系数, 或根轨迹增益
j =1
zi (i = 1,2m) − − − − → G(s)的零点, 称为零极点形式
pi (i = 1,2n) − − − − → G(s)的极点。
Ch2 控制系统的数学模型
◼ 传递函数的另一种形式:尾1标准型,频率法中多用
K
G(s) = s
m1 i =1
(
i
s
+
1)
n1 j =1
(T
j
s
+
1)
m2 (
k =1
2 k
s
2
+
2
k k s
+1)
n2 l =1
(Tl
2
s
2
+
2
lTl s
+1)
i ,Tj -----时间常数
称为时间常数形式
I
I1
Ux
1/C1s
Uo
1/R2
1/C2s
_
I2
Ch2 控制系统的数学模型
四. 方框图的等效变换和化简
1:串联