根据图求传递函数
合集下载
由伯德图确定传递函数
G(s)
K (1 1 s) 2 10
K (1 0.1s) 2
s(1 1 s) 2
s(1 5s) 2
0.2
穿越频率 1 ,因此,可以由L(1)=1, 或者 G( j ) 1 1 确定K。
通常在穿越频率附近,转折频率在穿越频 率左边的惯性环节的对数幅频特性可以认为是 -20db/dec 的斜线,即可以近似为一个积分环 节。而转折频率在穿越频率右边的惯性环节的 幅频特性可以认为是 0d的b 水平线,即可以近 似为1。
例2.29 某最小相位系统的对数幅频特性的渐近 线如图2.58所示,确定该系统的传递函数。
L( )
-20
-60 1
0 0.2
10
-20 图2.58 最小相位系统的伯德图
解 由于对数幅频特性的低频段是的直
线 20db / dec,所以,系统的传递函数有1个
积分环节。根据转折点处对数幅频特性渐近线 斜率的变化,容易写出系统的传递函数为
2. 由伯德图确定传递函数
对于最小相位系统,幅频特性和相频特性是单值 对应的,因此,根据系统的对数幅频特性就可以 写出系统的传递函数或者频率特性。 例2.28 某最小相位系统的对数幅频特性的渐近线 如图2.57所示,确定该系统的传递函数。
dB
40
L( )
-20
20
0 0.1 0.4
-40 -20
假设系统是最小相位的,则根据所选择的对数 幅频特性的渐近线,可以写出系统的传递函数。 例如,某系统的实验数据如表2.4所示,其伯 德图如图2.59所示。
表2.4 某系统的实验数据
0.1
0.2
0.4
1
2
4
10204099.6 49.3 23.7 7.96 3.26
第五章(5) 频域:用实验法确定系统的传递函数

第五节 用实验法确定系统传递函数
例
已知采用积分控制液位系统的结构 和对数频率特性曲线,试求系统的传 和对数频率特性曲线 试求系统的传 hr(t) 递函数。 递函数。 1 K h(t)
1 4
L(ω)/dB
20 0 -20 -20dB/dec
S
Ts+1
φ(ω)
0 -90 -180
返回 解: 将测得的对数 -40dB/dec 1 = 曲线近似成渐 0.25S2+1.25S+1) 近线: 近线 ω 1 φ(s)= (S+1) (S/4+1)
ω
一用实验法确定系统的伯德图二根据伯德图确定传递函数第五节用实验法确定系统传递函数一用实验法确定系统的伯德图若线性系统是稳定的可用实验的方法获得其伯徳图具体步骤如下
第五章 频率特性法
第五节 用实验法确定系统传递函数
频率特性具有明确的物理意义, 频率特性具有明确的物理意义,可 用实验的方法来确定它.这对于难以列 用实验的方法来确定它 这对于难以列 写其微分方程的元件或系统来说,具有 写其微分方程的元件或系统来说 具有 很重要的实际意义。 很重要的实际意义。
0
L(ω段的曲线与横 轴相交点的频率为 的频率为ω 轴相交点的频率为 0 20lgK 因为 =40 故 lgω0-lg1
1
ω0
ωc
ω
-40dB/dec
20lgK=40lgω0 K=ω02
第五节 用实验法确定系统传递函数
例 由实测数据作出系统的伯德图如图 所示,试求系统的传递函数。 所示,试求系统的传递函数。 由图可得: 解: 由图可得: L(ω)/dB 根据 0 ≤ξ ≤0.707 -40dB/dec ω0 =3.16 -20dB/dec 40 取 ξ=0.38 20lgMr=3dB 3dB 20 Mr=1.41 0 由频率曲线得 2ω0 ω 0.5 1 -60dB/dec Mr= G(s)= =1.41 -20 φ(ω) ξ 2 21-ξ 2 0 ω 3.16 (2S+1) -90 2(0.25S=±0.92 ξ ± 得:1 2+0.38S+1) -180 S -270 ξ2=±0.38 ±
《自动控制原理》第二章传递函数
G2 ( s ) N ( s) 1 + G1 ( s)G 2 ( s) H ( s)
∑ C ( s ) = Φ ( s) R( s) + Φ ( s) N ( s) =
G2 ( s )[G1 ( s) R ( s) + N ( s )] 1 + G1 ( s)G 2 ( s ) H ( s)
20
N ( s)
14
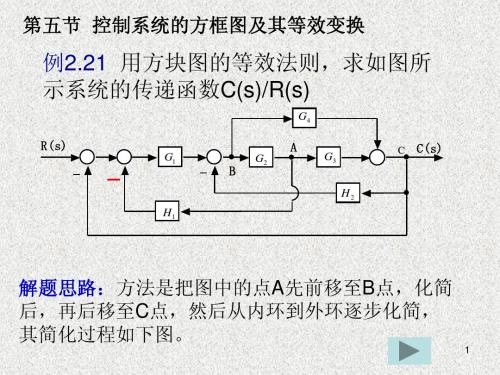
例2.23
R(s)
G4 G1 A G3 H2 H1
C
p1 = G1G2G3
_
-
B
G2
C (s)
∆1 = 1
L1 = −G1 G 2 H 1
p2 = G1G4
∆2 = 1
L2 = − G 2 G 3 H 2 L3 = −G 1 G 2 G3
L4 = − G 4 H 2
注意:回路 注意: 找不全是最 大的问题
5
1 R 1 G1 -1 1 G2 -1 1 G3 -1 K C
1
-1
•前向通路:开始于输入节点,沿支路箭头方向,每个节点 前向通路:开始于输入节点,沿支路箭头方向, 前向通路 只经过一次,最终到达输出节点的通路称之前向通路。 只经过一次,最终到达输出节点的通路称之前向通路。 •回路:起点和终点在同一节点,并与其它节点相遇仅一次的通路。 回路:起点和终点在同一节点,并与其它节点相遇仅一次的通路。 回路 •回路中所有支路的乘积称为回路增益。 回路中所有支路的乘积称为回路增益。 回路中所有支路的乘积称为回路增益 •不接触回路:回路之间没有公共节点时, 不接触回路:回路之间没有公共节点时, 不接触回路 不接触回路。 这种回路叫做 不接触回路。 •在信号流图中,可以有两个或两个以上不接触回路。 在信号流图中, 在信号流图中 可以有两个或两个以上不接触回路。
传递函数及方块图剖析

则G(s) = Uo s = RCS
(RC = T
K 1
Ui s RCS + 1
K = 1)
Gs k
4 积分环节
s
时间域方程
xo t k xi t dt
X o s
k
X i s
s
X o s X i s
k s
例9
i2(t)
i1(t) ui(t)
R
A
B
C
_
K0 +
uo(t)
ui (t) = -C duo (t)
传递函数及 典型环节的传递函数
一、传递函数定义:
在初始条件为零时,线性
定常系统输出象函数 Xo s与输 入象函数 Xi s 之比。
Gs
X o s Xi s
Xi s Gs Xo s
设线性定常系统的微分方程为:
a
0
xon
t
a1
x
n1
o
t
a
n1
x
o
t
a
n
x
o
t
b0
x
m
i
t
b1
x
m
i
1
t
bm 1
x i
t
则G(s) = Uo s =
1
Ui s RCS + 1
(RC = T)
例4
弹簧-阻尼系统
K
xi
t
xo
t
D
dxo
dt
t
KXi s KXo s DsXo s
Gs
Xo s Xi s
K Ds
K
D
1 s 1
K
Gs Ks
如何用梅逊公式求传递函数
• 通路传输(增益):通路中各支路传输的乘积称为通路传输或通 路增益。前向通路中各支路传输的乘积称为前向通路传输或前 向通路增益。
• 回路传输(增益):回路上各支路传输的乘积称为回路传输或回
路增益。
1/8/2024
如何用梅逊公式求传递函数
4
信号流图的等效变换
• 串联支路合并:
ab x1 x2 x3
8
例2: 已知结构图如下,可在结构图上标出节点,如上图所示。 然后画出信号流图如下图所示。
k
R(S) b
m
d
V1
l
g V3 e
V2
h
C(S)
f f
m
h
R1
Ⅰ
b
l
Ⅱ
V3
k
Ⅲ
Ⅳ
C
V1 d Ⅴ e V2 1
g
1/8/2024
如何用梅逊公式求传递函数
9
信号流图的绘制
例2: 按微分方程拉氏变换后
的代数方程所表示的变量间
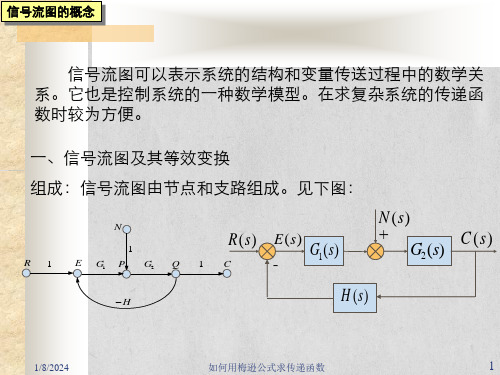
信号流图的概念
信号流图可以表示系统的结构和变量传送过程中的数学关 系。它也是控制系统的一种数学模型。在求复杂系统的传递函 数时较为方便。
一、信号流图及其等效变换
组成:信号流图由节点和支路组成。见下图:
R1
N
1
E G1 P
G2
Q
1
R(s)
C
E(s)
-
G1(s)
N (s)
+ G2(s) C (s)
H
H (s)
式中: La 流图中所有不同回路的回路传输之和;
LbLc 所有互不接触回路中,每次取其中两个回
路传输乘积之和;
LdLeLf 所有互不接触回路中,每次取其中三个
自动控制原理 习题解答

3-8
已知系统的闭环传递函数为 GB (s)
=
Y (s) R(s)
=
(s2
15.36(s + 6.25)
,试估算
+ 2s + 2)(s + 6)(s + 8)
系统性能指标。
解:高阶系统可以降阶,系统有一对零极点 − 6.25 和 − 6 ,是对偶极子,可以相消。 系统剩下三个极点 −1 ± j 和-8,显然 −1 ± j 是系统的主导极点,所以系统降阶后,闭环传
解 (1) 当τ = 0时则原系统 的开环传递函数为
G(s) = 10 s(s + 2)
3-2
与G(s) =
ω
2 n
比较可知
s(s + 2ζωn )
由
ω2ζn2ω=n
10 =
2
得
ωn = 10
ζ =
10
10
(2) 当τ ≠ 0时则原系统 的开环传递函数为
G(s) =
10
s(s + 2 +10τ )
3-10 设单位反馈系统的开环传递函数如下,试确定系统稳定时 K 的取值范围。
(1) G(s)H (s) =
K
s(s + 1)(0.2s + 1)
(2) G(s)H (s) = K (0.2s + 1) s(s + 1)(s + 1)
解 (1) 闭环传递函数为
∴GB (s)
=
K s(s + 1)(0.2s + 1) + K
=
0.2s 3
K + 1.2s 2
+s+
K
根据bode图求传递函数

Bode图的特点与意义
01
Bode图的特点是直观、易于理解,能够清晰地展示系统的频率 响应特性。
02
通过Bode图,可以方便地分析系统的稳定性、带宽、阻尼比等
关键参数。
Bode图在控制系统分析和设计中具有重要意义,是分析和设计
03
线性时不变系统的重要工具之一。
03
如何从Bode图求传递函数
利用Bode图的频率响应求传递函数
THANKS
感谢观看
利用Bode图的相位响应求传递函数
相位响应
相位响应是Bode图中的另一个重要特性,它描述了系统在不同频率下的相位 延迟。
传递函数的确定
通过观察Bode图的相位响应,可以确定传递函数的极点和零点。极点和零点对 应于相位响应的-90度和+90度,通过这些点的位置和数量可以反推出传递函数 的分子和分母。
传递函数的应用
系统分析和设计
通过分析传递函数,可 以对系统进行稳定性分 析、性能分析和优化设 计等。
控制工程
在控制工程中,传递函 数被广泛应用于线性时 不变控制系统的分析和 设计,如PID控制器等。
信号处理
在信号处理中,传递函 数用于描述线性时不变 滤波器的特性,如低通 滤波器、高通滤波器等。
02
在低频段,斜率为-20dB/dec;在高频段,斜率为0dB/dec。
结论
该系统在低频段具有较大的增益,随着频率的增加,增益逐渐减小,并在高频段趋于稳定 。由于存在一个极点在s=1处,该系统是不稳定的。
实例三:复杂的多阶系统
01
传递函数
$G(s) = frac{1}{s^2 + 2s + 5}$
02
Bode图
根据bode图求传递函数

此外,系统存在另二个转折频率:1和20rad/s。对应的典
型环节分别为:
1,
1
s 1 s / 20 1
综上所述,系统传递函数为:
G(s) K s 1 1 1 1 0.1 s s 1 s / 20 1
10s 1
s(s 1)(0.05s 1)
例2:已知最小相角系统开环对数渐近幅频曲线 ,求开环传递函数。
5
例3 求解传递函数
L()/dB
20
0
-20dB/dec
-40dB/dec
10 20
ቤተ መጻሕፍቲ ባይዱ
12 -20dB/dec
-40dB/dec
6
100(s 2)
10(0.5s 1)
Gk (s)
s(s 1)(s
20)
s(s
1)(0.05s 1)
例4:根据对数幅频特性,求系统的传递函数。
(rad/s)
-40
解:系统低频段斜率为-20dB/dec,v=1,I型系统。
-20lgw+20lgK
k =1。
在ω1= 0.1处,渐近线变为水平线,故ω1对应的应是一 阶微分环节的转折频率。 对应的传递函数为:s 1
0.1
L() 20
-20
0 -20
0.1
1
20 -40
(rad/s)
绘制近似对数幅频曲线的步骤:
① 在半对数坐标上标出所有的转折频率(1/T);
② 确定低频段的斜率和位置;
③ 由低频段开始向高频段延伸,每经过一个转折频率,
曲线的斜率发生相应的变化。
1
例1:已知最小相位系统的近似对数幅频特性曲线 如图所示。求系统的传递函数。