基于分段随机扰动幅值的随机并行梯度下降算法研究_吴健
求解一类双层规划的自适应变异动态差分进化算法

求解一类双层规划的自适应变异动态差分进化算法吴亮红;徐睿;左词立;曾照福;段伟涛【摘要】针对一类上层函数和约束函数不具有凸性和可微性要求,而下层函数可微且凸的非线性双层规划问题,首先通过Karush-Kuhn-Tucher(KKT)条件将双层规划问题转换为单层约束非线性规划问题,并结合非固定多段映射罚函数法和精确罚函数法对约束条件进行无约束化处理,然后提出一种改进的动态差分进化算法优化对系列无约束优化问题进行求解.对8个测试实例进行数值计算并与现有算法进行比较.测试结果表明,所提方法是一种求解该类双层规划问题的有效方法.【期刊名称】《中南大学学报(自然科学版)》【年(卷),期】2016(047)010【总页数】9页(P3436-3444)【关键词】双层规划;KKT条件;罚函数法;差分进化算法【作者】吴亮红;徐睿;左词立;曾照福;段伟涛【作者单位】湖南科技大学信息与电气工程学院,湖南湘潭,411201;湖南科技大学信息与电气工程学院,湖南湘潭,411201;湖南科技大学信息与电气工程学院,湖南湘潭,411201;湖南科技大学信息与电气工程学院,湖南湘潭,411201;湖南科技大学信息与电气工程学院,湖南湘潭,411201【正文语种】中文【中图分类】TP18双层规划问题(BLPP)是一类具有主从递阶结构的系统优化问题。
由于这种模型更能描述实际系统的阶层关系和更全面地体现决策者的意愿,故在经济、军事、交通、电力和工程等众多领域具有十分重要的理论意义和应用背景[1−2]。
一般来说,求解双层规划非常困难,这主要包括2方面的原因。
一方面,双层规划问题是1个NP-hard问题,HANSEN等[3]证明即使是最简单的双层线性规划也是强NP-Hard问题。
VICENTE等[4]指出甚至寻找双层线性规划问题的局部最优解也是1个NP-Hard问题。
另一方面,由于上层优化问题的目标函数取决于下层优化问题的解函数,而这个解函数一般是非线性且不可微的,故双层优化问题是1个非凸优化问题。
BP算法的多核并行研究及其在枣无损检测的应用

BP算法的多核并行研究及其在枣无损检测的应用黄磊;王凡;吴素萍【摘要】为提高BP神经网络算法的训练速度,针对BP网络训练过程中层间数据传播,权值更新耗时大的问题进行深入分析.基于单机多核CPU系统环境,运用OpenMP并行技术,设计实现多核架构下基于OpenMP的BP并行算法.将该算法应用于基于高光谱图像技术的长枣糖度无损检测中,实验结果表明,与原串行算法相比,并行算法可以保证算法的相对误差较低,取得较好加速比,该算法在不同平台随着核数的增加,加速比也在增加,验证了其可行性、有效性和可扩展性.【期刊名称】《计算机工程与设计》【年(卷),期】2016(037)009【总页数】5页(P2502-2506)【关键词】BP神经网络;OpenMP并行;多核;并行优化;无损检测【作者】黄磊;王凡;吴素萍【作者单位】宁夏大学数学计算机学院,宁夏银川750021;宁夏大学数学计算机学院,宁夏银川750021;宁夏大学数学计算机学院,宁夏银川750021【正文语种】中文【中图分类】TP302.7传统的BP训练算法[1-3]在网络的训练过程中都是基于串行的执行过程。
针对数据量较大的问题,传统的BP训练过程比较耗时,无法满足大数据应用的需求。
并行处理技术是提高BP网络训练速度的有效方法,目前有基于集群的BP并行方法[4],但由于编写程序复杂且成本较高,不易推广应用。
还有利用特殊硬件加速[5-8],例如GPU加速,这类加速技术普遍是利用GPU计算能力,将训练数据传到GPU端进行计算提高训练速度。
多核CPU加速是一个较热的并行研究领域[9-11],本文对BP算法进行了介绍,分析其耗时部分,结合该算法特点,比较不同核数和不同样本的串并算法时间及效率,分析影响该并行算法加速比的原因,通过OpenMP技术优化了BP神经网络训练过程,实现了多核CPU并行加速。
BP算法可以对枣的糖度进行无损检测[12],但时间效率不高,可以利用多核并行加速的方法提高效率,本文将并行BP算法应用于对枣的糖度进行无损检测中,并将该算法在台式机四核机器和六核机器上进行实验,都取得了较好的加速效果。
双频激励下含分数阶非线性汽车悬架系统的混沌研究
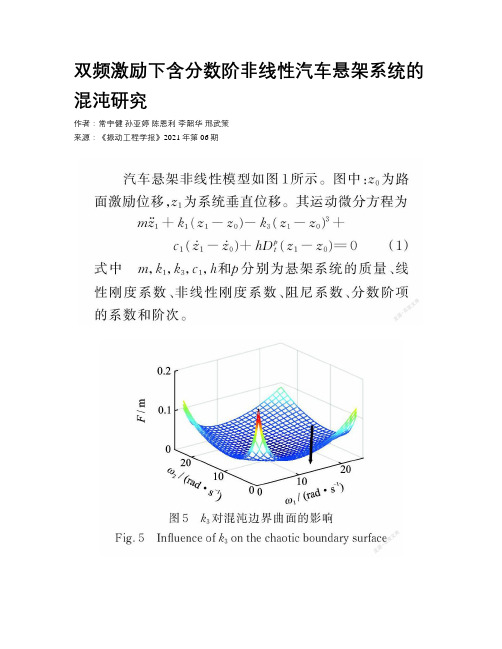
双频激励下含分数阶非线性汽车悬架系统的混沌研究作者:常宇健孙亚婷陈恩利李韶华邢武策来源:《振动工程学报》2021年第06期摘要:研究了含分数阶非线性特性的1/4汽车悬架模型在双频激励下的混沌运动。
运用Melnikov 方法,推导出系统发生异宿混沌运动的解析必要条件,得到系统混沌边界曲面阈值,讨论了悬架系统各参数对混沌边界曲面的影响。
运用时间历程图、频谱图、相图、庞加莱截面图及最大李雅普诺夫指数进行数值验证。
研究表明,在双频激励下悬架系统存在混沌运动,且含分数阶非线性悬架系统中阻尼系数、刚度系数等各参数对混沌边界曲面阈值都有一定影响,其中分数阶项阶数和系数及线性阻尼系数对其影响较大。
关键词:非线性振动;汽车悬架;混沌运动;双频激励;分数阶中图分类号: O322;U463.33 文献标志码: A 文章编号:1004-4523(2021)06-1198-09DOI:10.16385/ki.issn.1004-4523.2021.06.011引言分数阶微积分作为重要的数学分支,于1695年德国科学家 Leibniz 和法国数学家L'Hopital 在探讨1/2阶导数时首次被提出[1]。
然而,由于缺乏应用背景支撑等多方面原因,它长期以来并没有得到较多的关注和研究。
随着20世纪70年代以来对分形和各种复杂系统的深入研究,分数阶微积分理论及其应用开始受到广泛关注,很多学者对分数阶微积分的基本特性进行研究,在基础理论方面取得了很大进展[2⁃6]。
进入21世纪以来,分数阶微积分建模方法和理论在复杂黏弹性材料力学本构关系、反常扩散、高能物理等诸多领域有了若干非常成功的应用[7⁃10],凸显了其独特优势和不可替代性,所以研究含分数阶微积分方程中的典型力学特性和分数阶参数对动力系统的影响很有意义,大量学者进行着这方面的研究[11⁃13]。
车辆悬架减振装置不仅具有迟滞非线性特性,而且多数阻尼器都具有类黏弹性本构关系,这些黏弹性材料介于弹性和阻尼特性之间,普通的整数阶理论无法准确地描述这种材料的本构关系。
基于改进DeepLabV3+的引导式道路提取方法及在震源点位优化中的应用

2024年3月第39卷第2期西安石油大学学报(自然科学版)JournalofXi’anShiyouUniversity(NaturalScienceEdition)Mar.2024Vol.39No.2收稿日期:2023 06 03基金项目:国家自然科学基金面上项目“基于频变信息的流体识别及流体可动性预测”(41774142);四川省重点研发项目“工业互联网安全与智能管理平台关键技术研究与应用”(2023YFG0112);四川省自然科学基金资助项目“基于超分辨感知方法的密集神经图像分割”(2022NSFSC0964)第一作者:曹凯奇(1998 ),男,硕士,研究方向:遥感图像标注。
E mail:819088338@qq.com通讯作者:文武(1979 ),男,博士,研究方向:人工智能在地球科学的应用、高性能计算。
E mail:wenwu@cuit.edu.cnDOI:10.3969/j.issn.1673 064X.2024.02.016中图分类号:TE19文章编号:1673 064X(2024)02 0128 15文献标识码:A基于改进DeepLabV3+的引导式道路提取方法及在震源点位优化中的应用曹凯奇1,张凌浩2,徐虹1,吴蔚3,文武1,周航1(1.成都信息工程大学计算机学院,四川成都610225;2.国网四川省电力公司电力科学研究院,四川成都610094;3.中国石油集团东方地球物理勘探有限责任公司采集技术中心,河北涿州072750)摘要:为解决自动识别方法在道路提取时存在漏提、错提现象,提出一种引导式道路提取方法提高修正效率。
在DeepLabV3+原有输入通道(3通道)的基础上添加额外输入通道(第4通道),将道路的4个极点转化为二维高斯热图后作为额外通道输入网络,网络以极点作为引导信号,使网络适用于引导式道路提取任务;设计并行多分支模块,提取上下文信息,增强网络特征提取能力;融合类均衡二值交叉熵和骰子系数组成新的复合损失函数进行训练缓解正负样本不均衡问题。
蚁群算法研究综述
蚁群算法综述控制理论与控制工程09104046 吕坤一、蚁群算法的研究背景蚂蚁是一种最古老的社会性昆虫,数以百万亿计的蚂蚁几乎占据了地球上每一片适于居住的土地,它们的个体结构和行为虽然很简单,但由这些个体所构成的蚁群却表现出高度结构化的社会组织,作为这种组织的结果表现出它们所构成的群体能完成远远超越其单只蚂蚁能力的复杂任务。
就是他们这看似简单,其实有着高度协调、分工、合作的行为,打开了仿生优化领域的新局面。
从蚁群群体寻找最短路径觅食行为受到启发,根据模拟蚂蚁的觅食、任务分配和构造墓地等群体智能行为,意大利学者M.Dorigo等人1991年提出了一种模拟自然界蚁群行为的模拟进化算法——人工蚁群算法,简称蚁群算法(Ant Colony Algorithm,ACA)。
二、蚁群算法的研究发展现状国内对蚁群算法的研究直到上世纪末才拉开序幕,目前国内学者对蚁群算法的研究主要是集中在算法的改进和应用上。
吴庆洪和张纪会等通过向基本蚁群算法中引入变异机制,充分利用2-交换法简洁高效的特点,提出了具有变异特征的蚊群算法。
吴斌和史忠植首先在蚊群算法的基础上提出了相遇算法,提高了蚂蚁一次周游的质量,然后将相遇算法与采用并行策略的分段算法相结合。
提出一种基于蚁群算法的TSP问题分段求解算法。
王颖和谢剑英通过自适应的改变算法的挥发度等系数,提出一种自适应的蚁群算法以克服陷于局部最小的缺点。
覃刚力和杨家本根据人工蚂蚁所获得的解的情况,动态地调整路径上的信息素,提出了自适应调整信息素的蚁群算法。
熊伟清和余舜杰等从改进蚂蚁路径的选择策略以及全局修正蚁群信息量入手,引入变异保持种群多样性,引入蚁群分工的思想,构成一种具有分工的自适应蚁群算法。
张徐亮、张晋斌和庄昌文等将协同机制引入基本蚁群算法中,分别构成了一种基于协同学习机制的蚁群算法和一种基于协同学习机制的增强蚊群算法。
随着人们对蚁群算法研究的不断深入,近年来M.Dorigo等人提出了蚁群优化元启发式(Ant-Colony optimization Meta Heuristic,简称ACO-MA)这一求解复杂问题的通用框架。
基础设施改善了农业技术效率吗?——基于异质性随机前沿模型

基础设施改善了农业技术效率吗?——基于异质性随机前沿模型周晓时;李谷成;吴清华【摘要】采用异质性随机前沿模型,测算农村电力、公路、灌溉三大基础设施对中国农业技术效率的影响及其不确定性。
研究结果表明:(1)中国农业生产技术效率仅为0.35,生产效率仍有巨大的优化空间;(2)农村三大基础设施对技术无效率都有显著缓解作用,但也增加了技术效率的不确定性,且作用效果呈现农村公路设施>农村电力设施>农村灌溉设施的排序;(3)公路设施加剧地区技术效率的不确定性,降低了东、中部技术效率,但对西部技术效率有促进作用。
农村电力设施对地区技术效率不确定性有反向作用,仅改善了中部地区的技术效率。
灌溉设施对东部技术效率的改善作用不明显,中部地区由于公共物品特性导致技术效率下降,但显著提升了西部地区技术效率。
基础设施对各地区技术效率不确定性作用方向一致,都为强化效果。
【期刊名称】《农林经济管理学报》【年(卷),期】2017(000)002【总页数】8页(P191-198)【关键词】农村基础设施;技术效率;不确定性;异质性随机前沿模型【作者】周晓时;李谷成;吴清华【作者单位】【正文语种】中文【中图分类】F2基础设施投资是吸纳就业、扩大内需、促进经济增长的重要手段。
在农业生产领域,基础设施更是重要的基础条件[1]。
截至2015年底,中国耕地有效灌溉面积建设达6 612.0万km2,约占世界总数的1/5;农村公路通车总里程378万km,基本实现建制镇或村的“村村通”。
此外,农村用电量从1999年到2014年的增长翻了近两番,达到8 884.4亿kw·h。
此外,2015年“中央一号文件”全文也有12处提到农村基础设施,农村基础设施建设成为提高农业生产能力的重要保障。
早在20世纪40年代,基础设施对经济增长的外部性效应就已引起学者们的关注[2]。
在农业经济发展领域,国内外学者也做了大量研究。
Aigner运用C-D生产函数分别研究了发达和不发达国家的农村基础设施对农业的产出效应,实证结果表明并不能拒绝“基础设施能提高农业产出”的假设[3]。
联合收获机前进速度模糊控制系统多目标遗传优化

联合收获机前进速度模糊控制系统多目标遗传优化宁小波;陈进;李耀明;杨广静;吴培;陈思【摘要】针对联合收获机前进速度模糊控制系统参数设计具有主观性,导致作业性能不理想的问题,以切纵流联合收获机样机为研究对象,构建联合收获机前进速度模糊控制系统仿真模型,并建立控制性能和收获性能的优化目标函数来衡量联合收获机的作业性能,利用多目标遗传算法对模糊控制系统的隶属函数和输送槽、割台螺旋输送器和切流滚筒对前进速度的影响因子进行优化.通过对优化前后模型仿真对比和两组田间试验数据分析,表明优化后的控制系统在受外界干扰情况下控制性能得到了较好的保持,收获性能在喂入量变化不大情况下,单位平均损失率分别由1.45%和1.26%降至1.12%和1.14%,联合收获机的总体作业性能得到改善.【期刊名称】《农业机械学报》【年(卷),期】2015(046)005【总页数】7页(P68-74)【关键词】联合收获机;前进速度;模糊控制系统;多目标遗传优化【作者】宁小波;陈进;李耀明;杨广静;吴培;陈思【作者单位】江苏大学机械工程学院,镇江212013;巢湖学院电子工程与电气自动化学院,合肥238000;江苏大学机械工程学院,镇江212013;江苏大学现代农业装备与技术教育部重点实验室,镇江212013;江苏大学机械工程学院,镇江212013;江苏大学机械工程学院,镇江212013;江苏大学机械工程学院,镇江212013【正文语种】中文【中图分类】S225.31联合收获机作业过程中允许损失率和收获效率是衡量联合收获机收获质量的主要因素。
当田间作物条件如作物品种、作物密度等变化时,将直接影响到联合收获机的收获质量。
为了适应田间作物条件的变化,联合收获机必须能相应地改变其前进速度的大小,以保证收获质量。
因此,收获性能良好的联合收获机应在不超过额定喂入量和允许损失率的前提下具有最大的前进速度[1-7]。
现有联合收获机前进速度控制系统一般都采用模糊控制技术。
吉林大学2014年下半年授予博士学位人员名单

2007311030 2011311036 2009311030 2011311012 2011311031 2007311010 2008321015 2011931001 2011931021 2010931038 2011931027 2010321014 2010321018 2011321015 2010931025 2011931006 2011931026 2011931005 2011931012 5201098101 2011331063 2011331026 2011331120 2010331127 2011331102 2011331127 2011951022 2011951024 2011951018 2011331023 2011331037 2011951021 2010951030 2009951017 2011951013 2011331099 2011331042 2011331038 2011331054 2010331096 2010331139 2011331011 2009331003 2011611019 2010611004 2011611017 2010611028
张树功 高文杰 李勇 *从福仲 吴柏生 闫广武 吕品 胡湛 胡湛 金明星 崔启良 许大鹏 郑以松 贺天民 王欣 崔田 高春晓 李红东 崔田 张宗弢 裘式纶 裘式纶 于爱民 宋大千 林英杰 柏旭 张红星 李菲 吴玉清 杨文胜 贾明君 张红星 吴玉清 任爱民 张红星 汤钧 田文晶 崔占臣 关绍巍 沈家骢 姜振华 邹海峰 陈春海 孙丰月 孙丰月 张梅生 薛林福
李洁 张旭 李建华 彭诚信 于莹 王彦明 冯彦君 王彦明 王彦明 吕岩峰 那力 张贤明 *杨海蛟 刘雪莲 黄凤志 董才生 张金荣 邴正 崔月琴 韩喜平 韩喜平 宋连胜 韩广富 赵海月 赵海月 吕明臣 吕明臣 李守奎 王树海 沈文凡 张福贵 王学谦 尹允镇 宿久高 杨冬 傅景川 尹允镇 杨军 杨军 程妮娜 李书源 刘会军 李书源 朱泓 纪友清 史少云 李永海
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 随机并行梯度下降算法
2.1 随 机 并 行 梯 度 下 降 算 法 基 本 原 理
SPGD 算法是 一 种 迭 代 算 法,通 过 优 化 性 能 指
标[取斯特雷尔比 (SR,RS)],实 现 变 形 镜 驱 动 电 压
控制。性能指标的变化量表示为
式中,
δRS = RS+ (n)- RS- (n),
摘要 为了提高随机并行梯度下降(SPGD)算法的 收 敛 速 度,提 出 了 分 段 随 机 扰 动 幅 值 的 改 进 方 法 。 从 理 论 上 分 析了固定增益系数时,随 机 扰 动 幅 值 对 SPGD 算 法 收 敛 速 度 的 影 响 ;提 出 了 分 段 随 机 扰 动 幅 值 的 改 进 方 法 ;基 于61单元变形镜,建立无波前探测自适应光学系 统 模 型,对 前 65 阶 Zernike多 项 式 模 拟 的 满 足 Kolmogorov谱 的 大气湍流畸变波前进行校正。结果表 明,采 用 分 段 随 机 扰 动 幅 值 的 SPGD 算 法 比 固 定 最 佳 随 机 扰 动 幅 值 时 传 统 SPGD 算法的收敛速度提高了近1.6倍,证明了该改进算法的可行性。 关 键 词 自 适 应 光 学 ;波 前 校 正 ;随 机 并 行 梯 度 下 降 ;分 段 随 机 扰 动 幅 值 中 图 分 类 号 TP273.2 文 献 标 识 码 A doi:10.3788/CJL201441.0712001
Research of Stochastic Parallel Gradient Descent Algorithm Based on Segmentation Random Disturbance Amplitude
Wu Jian1 Yang Huizhen2 Gong Chenglong2
烄 1 School of Information and Electrical Engimeering,China University of Mining and Technology, 烌
(6)
式中 N 为变 形 镜 驱 动 器 个 数,取 61;uj 为 第j 个 驱
动器的驱 动 电 压;Sj(r)为 第j 个 驱 动 器 的 影 响 函
数 ,服 从 高 斯 分 布 [10]:
Sj(x,y)=
{ { }} exp ln P 槡[x-xc(j)]2 + [y-yc(j)]2 α , rd
Xuzhou,Jiangsu 221116,China
烆2 School of Electronic Engineering,Huaihai Institute of Technology,Lianyungang,Jiangsu 222005,China烎
Abstract The improved method of random perturbance amplitude section is proposed to increase the convergence speed of stochastic parallel gradient descent(SPGD)algorithm.The SPGD algorithm convergence rate,which can be effected by the random disturbance amplitude,is analyzed when the gain coefficient is fixed.The segmentation random perturbance amplitude method is put forward.The adaptive optics system without wavefront sensor is built with a 61-element deformation mirror to correct the wavefront aberrations,which is simulated by the 65-order Zernike polynomials and the aberrations meet the Kolmogorov spectrum.Compared with the best fixed initial perturbance amplitude SPGD algorithm,the convergence speed increases 1.6 times by adopting the SPGD algorithm based on the segmentation random perturbance amplitude.The improved algorithm is verified to be feasible. Key words adaptive optics;wavefront correction;stochastic parallel gradient descent;segmentation random perturbance amplitude OCIS codes 220.1000;220.1080;300.6170
0712001-1
中 国 激 光
收 敛 速 度 较 慢 ,当 校 正 单 元 数 增 加 时 ,速 度 慢 显 得 尤 为突出。
先前 对 SPGD 算 法 的 研 究 大 致 可 以 分 为 三 个 方 面 :1)从 控 制 器 处 理 机 出 发 ,进 行 电 路 优 化 设 计 , 其主要有 基 于 SPGD 控 制 算 法 的 单 指 令 多 数 据 流 (SMD)结构实时并行处理机的研究[6];2)从变 形 镜 单元数出发,采用单 元 数 少 的 变 形 镜 进 行 较 大 畸 变 波 前 的 校 正 ,逐 级 增 加 变 形 镜 单 元 数 进 行 畸 变 校 正 , 最终达到所需要的校正精 度[7];3)从 算 法 本 身 的 主 要影响因素增益系 数 和 随 机 扰 动 幅 值 出 发,增 益 系 数固定时,随机扰 动 幅 值 存 在 最 优 取 值 范 围,反 之, 增益系数存在最优取值范围。
收 稿 日 期 :2013-12-02;收 到 修 改 稿 日 期 :2014-01-28 基 金 项 目 :中 国 科 学 院 自 适 应 光 学 重 点 实 验 室 基 金 (LAOF201302) 作 者 简 介 :吴 健 (1990— ),男 ,硕 士 研 究 生 ,主 要 从 事 自 适 应 光 学 技 术 方 面 的 研 究 。E-mail:644323991@qq.com 导 师 简 介 :龚 成 龙 (1964— ),男 ,硕 士 ,教 授 ,主 要 从 事 控 制 科 学 与 工 程 等 方 面 的 研 究 。E-mail:GongCL126@126.com
1 引 言
目前自适应光学 (AO)系 统 大 都 采 用 波 前 传 感 器对畸变波前实时 探 测 并 重 构,再 通 过 波 前 校 正 器 校正畸变波 前 。 [1] 与 常 规 自 适 应 光 学 技 术 相 比,无 波前 探 测 自 适 应 光 学 技 术 具 [2] 有 系 统 结 构 简 单、不
验 仿 真 分 析 可 知,D/r0 分 别 为 5,10,15 时,迭 代 1000,2000,5000次,即 可 实 现 RS 的 完 全 收 敛 ),将
随机扰动幅值分为 L 段 (L 可 取 1/c 中 的 任 何 整 数
值,c为 系 数b 变 化 间 隔,文 中 分 别 取 0.01,0.02,
0.05,0.1,0.2,b为影 响 系 数,即b=1-L×c)。 算
法每迭代 N/L 次,随机扰动幅值即为初始随机扰动
幅 值 与 按 间 隔 值 递 减 的 系 数b 之 积 ,即
A = B ×b,
(5)
式中 A 为随机扰动幅值,B 为初始随机扰动幅值。
根据 经 验 和 前 人 的 研 究,文 中 选 取 固 定 的 增 益
最优的 电 压 向 量 u(r)寻 找,使 得 残 余 波 前 最 小,系
统性能达到最优。
2.2 基于分段随 机 扰 动 幅 值 的 随 机 并 行 梯 度 下 降
算法
根据文献[4],当增益系数固 定 时,RS 的 收 敛 速 度随着随机扰动 幅 值 的 变 化 而 变 化。 校 正 初 期,畸
变较大,采用较大的 随 机 扰 动 幅 值 实 现 对 畸 变 波 前
(1)பைடு நூலகம்
RS+ (n)= RS[u(n)+δu(n)],
(2)
RS- (n)= RS[u(n)-δu(n)],
(3)
式中 δu(n)= {δu1(n),δu2(n),…,δuk(n)}为 每 次
迭代时,随机生成电压扰动向 量,k 为 驱 动 器 个 数,n
为迭代次数,其 满 足 伯 努 利 分 布,即 幅 值 的 绝 对 值
相 等 、概 率 相 等 。
第n 次迭代,变形镜驱动器的控制电压更新为
u(n+1)=u(n)+γδRS(n)δu(n), (4)
式中γ 为增益系数。实际应用中,若目标函数向极大
化方向优化,γ 为正值;反之取负值。
利用δRS 与控制参 数 δu 的 变 化 量 对 控 制 参 数
进行梯度估计,以迭 代 方 式 在 梯 度 下 降 方 向 上 进 行
第 41 卷 第 7 期 2014 年 7 月
中 国 激 光 CHINESE JOURNAL OF LASERS
Vol.41,No.7 July,2014
基于分段随机扰动幅值的随机并行梯度 下降算法研究
吴 健1 杨慧珍2 龚成龙2
( ) 1 中国矿业大学信息与电气工程学院,江苏 徐州 221116 2 淮海工学院电子工程学院,江苏 连云港 222005
的 快 速 校 正 ;校 正 后 期 ,采 用 较 小 的 随 机 扰 动 幅 值 来
获得较高的校正精度。