机械simulink仿真作业
基于Simulink柴油机工作过程的仿真分析

基于Simulink柴油机工作过程的仿真分析1. 引言1.1 引言简介本篇文章将详细介绍基于Simulink柴油机工作过程的仿真分析,首先将介绍研究背景,包括柴油机的重要性和研究现状;其次将阐述研究目的,明确我们希望通过这次仿真分析所达到的目标。
接下来,将介绍Simulink仿真工具的基本原理和特点,以及柴油机的工作原理分析,为后续的仿真模型设计奠定基础。
然后,将详细介绍Simulink仿真模型的设计过程,包括对模型的搭建和参数设置。
随后,将分析仿真结果,探讨柴油机在不同工况下的性能表现,并提出参数优化的可能方向。
将对研究成果进行总结,同时讨论存在的问题并展望未来的研究方向。
通过本次仿真分析,有望为柴油机技术的发展和性能提升提供一定的指导和借鉴。
1.2 研究背景柴油机作为内燃机的一种,具有高效率、高功率和经济性等优点,在汽车、船舶、发电厂等领域广泛应用。
随着环保意识的提升和节能减排要求的加大,如何提高柴油机的燃烧效率、降低排放,成为了当前研究的热点之一。
仿真技术在柴油机领域的应用也逐渐增多,通过仿真可以有效地分析柴油机工作过程中的各种参数变化对性能的影响,进而指导工程实践。
传统的柴油机仿真分析需要大量的试验数据和复杂的实验装置,成本高昂且耗时。
而基于Simulink的柴油机仿真技术具有方便、快捷、低成本的特点,能够模拟出柴油机工作过程的各个环节,为优化设计和性能提升提供了新的途径。
本文旨在利用Simulink软件对柴油机的工作过程进行仿真分析,探讨柴油机在不同工况下的性能表现,并通过对参数进行优化,提高其燃烧效率和降低排放,为柴油机的改进和优化提供理论支持。
1.3 研究目的研究目的主要是通过Simulink仿真分析柴油机工作过程,深入理解柴油机的工作原理及参数对性能的影响。
具体目的包括:1. 探讨柴油机在不同工况下的工作特性,分析其燃烧过程、热力循环等关键参数;2. 建立Simulink仿真模型,验证柴油机的工作性能;3. 分析不同参数对柴油机性能的影响,为参数优化提供理论依据;4. 探索如何通过调整柴油机的工作参数来提高其性能表现,实现性能的优化与提升。
matlab的simulink仿真建模举例 -回复
matlab的simulink仿真建模举例-回复Matlab的Simulink仿真建模举例Simulink是Matlab附带的一款强大的仿真建模工具,它能够帮助工程师们通过可视化的方式建立和调试动态系统模型。
Simulink通过简化传统的数学模型建立过程,使得工程师们能够更加直观地理解和分析复杂的系统。
在本文中,我们将介绍一个关于电机控制系统的Simulink仿真建模的例子。
一、了解电机控制系统在开始建模之前,我们首先需要了解电机控制系统的基本原理。
电机控制系统通常包括输入、电机和输出三个主要部分。
输入通常是来自于传感器或用户的命令信号,例如转速、位置或力矩。
电机是通过接受输入信号并根据特定的控制算法生成输出信号。
输出信号通常是电机的转速、位置或功率等。
控制算法通常采用比例-积分-微分(PID)控制或者其他控制算法。
二、建立Simulink模型1. 创建新的Simulink模型在Matlab主界面中,选择Simulink选项卡下的“New Model”创建一个新的Simulink模型。
2. 添加输入信号在Simulink模型中,我们首先需要添加输入信号模块。
在Simulink库浏览器中选择“Sources”类别,在右侧面板中找到“Step”模块,并将其拖放到模型中。
3. 添加电机模型接下来,我们需要将电机模型添加到Simulink模型中。
Simulink库浏览器中选择“Simscape”类别,在右侧面板中找到“Simscape Electrical”子类别,然后找到“Simscape模型”模块,并将其拖放到模型中。
4. 连接输入信号和电机模型将输入信号模块的输出端口与电机模型的输入端口相连,以建立输入信号与电机模型之间的连接。
5. 添加输出信号模块在Simulink模型中,我们还需要添加输出信号模块。
在Simulink库浏览器中选择“Sinks”类别,在右侧面板中找到“Scope”模块,并将其拖放到模型中。
simulink建模实例
simulink建模实例Simulink是一种功能强大的工具,用于建立和模拟各种系统的动态行为。
它可以帮助工程师和科学家更好地理解和分析系统的行为,并进行系统设计和优化。
下面我将通过一个实例来展示Simulink的应用。
假设我们要建立一个控制系统,用于控制一个小型机器人的移动。
该机器人有两个驱动轮,我们希望能够通过Simulink来设计一个控制器,使机器人能够按照预定的路径移动。
我们需要建立一个系统模型,包括机器人本身、传感器和执行器。
在Simulink中,我们可以使用各种模块来表示这些组件,并使用连线连接它们。
例如,我们可以使用“转向模块”来表示机器人的转向系统,使用“速度模块”来表示机器人的速度控制系统。
接下来,我们需要定义机器人的运动路径。
在Simulink中,我们可以使用“路径生成器”模块来定义路径。
通过调整路径生成器的参数,我们可以创建各种形状的路径,例如直线、曲线等。
然后,我们需要设计一个控制器,将路径信息转换为机器人的运动指令。
在Simulink中,我们可以使用“控制器模块”来实现这一功能。
该模块可以根据路径信息和机器人的当前位置,计算出机器人应该采取的行动,例如转向角度和速度。
我们需要将控制指令发送给机器人的执行器,以实现机器人的移动。
在Simulink中,我们可以使用“执行器模块”来模拟执行器的行为。
该模块可以将控制指令转换为实际的电压或力矩信号,驱动机器人的驱动轮进行运动。
通过上述步骤,我们就建立了一个完整的机器人控制系统模型。
我们可以在Simulink中进行仿真,观察机器人在不同路径和控制策略下的运动行为。
通过调整模型中各个组件的参数,我们可以进行系统性能的优化和改进。
Simulink是一个强大的工具,可以帮助我们建立和模拟各种系统的动态行为。
通过Simulink,我们可以更好地理解和分析系统的行为,并进行系统设计和优化。
在实际工程中,Simulink的应用广泛,并在控制系统、信号处理等领域发挥着重要作用。
simulink仿真实验报告
simulink仿真实验报告Simulink仿真实验报告一、引言Simulink是一种基于模型的设计和仿真工具,广泛应用于各领域的工程设计和研究中。
本次实验将利用Simulink进行系统仿真实验,通过搭建模型、参数调整、仿真运行等过程,验证系统设计的正确性和有效性。
二、实验目的本实验旨在帮助学生掌握Simulink的基本使用方法,了解系统仿真的过程和注意事项。
通过本实验,学生将能够:1. 熟悉Simulink的界面和基本操作;2. 理解和掌握模型构建的基本原理和方法;3. 学会调整系统参数、运行仿真和分析仿真结果。
三、实验内容本实验分为以下几个步骤:1. 绘制系统模型:根据实验要求,利用Simulink绘制出所需的系统模型,包括输入、输出、控制器、传感器等。
2. 参数设置:针对所绘制的系统模型,根据实验要求设置系统的参数,例如增益、阻尼系数等。
3. 仿真运行:通过Simulink的仿真功能,对所构建的系统模型进行仿真运行。
4. 仿真结果分析:根据仿真结果,分析系统的动态性能、稳态性能等指标,并与理论值进行对比。
四、实验结果与分析根据实验要求,我们绘制了一个负反馈控制系统的模型,并设置了相应的参数。
通过Simulink的仿真功能,我们进行了仿真运行,并获得了仿真结果。
仿真结果显示,系统经过调整参数后,得到了较好的控制效果。
输出信号的稳态误差较小,并且在过渡过程中没有发生明显的振荡或超调现象。
通过与理论值进行对比,我们验证了系统的稳态稳定性和动态响应性能较为理想。
五、实验总结通过本次实验,我们掌握了使用Simulink进行系统仿真的基本方法和技巧。
了解了系统模型构建的基本原理,并学会了参数调整和仿真结果分析的方法。
这对于我们今后的工程设计和研究具有重要的意义。
六、参考文献1. 《Simulink使用手册》,XXX出版社,20XX年。
2. XXX,XXX,XXX等.《系统仿真与建模实践教程》. 北京:XXX出版社,20XX年。
simulink建模练习题
simulink建模练习题Simulink是一种用于设计、模拟和实现动态系统的集成环境。
它通过图形化编程的方式,使得复杂的系统模型可以更加直观和易于理解。
本文将介绍并讨论两个Simulink建模练习题,帮助读者更好地掌握Simulink建模技巧。
第一题:调制解调器设计题目描述:设计一个用于调制解调的数字信号处理系统,实现信号的调制和解调功能。
解题思路:1. 打开Simulink,创建一个新的模型。
2. 导入所需的信号调制和解调器相关的模块。
3. 在模型中添加信号源和信号接收器,用于生成和接收信号。
4. 连接信号源和信号接收器到调制和解调器模块,完成信号的调制和解调功能。
5. 设置模型参数,例如信号的频率、振幅和采样率等。
6. 运行模型,观察信号的调制和解调效果。
第二题:控制系统建模题目描述:设计一个用于控制系统建模的Simulink模型,实现对机械装置的控制。
解题思路:1. 创建一个新的Simulink模型。
2. 导入所需的控制系统相关的模块。
3. 在模型中添加机械装置和控制器模块,用于对机械装置进行控制。
4. 连接机械装置和控制器模块,建立控制系统。
5. 设置模型参数,例如控制器的增益、机械装置的参数和输入信号等。
6. 运行模型,观察控制系统对机械装置的控制效果。
通过完成上述两个练习题,读者可以熟悉Simulink的基本操作和建模流程。
同时,这些练习题也提供了一些常见的建模场景,帮助读者了解如何将Simulink应用于实际问题中。
总结:本文介绍了两个Simulink建模练习题,分别是调制解调器设计和控制系统建模。
通过这些练习,读者可以学习和实践Simulink的使用方法,并且熟悉建模的基本流程和技巧。
希望本文对于读者在Simulink建模方面的学习和应用有所帮助。
matlab-SIMULINK仿真实例
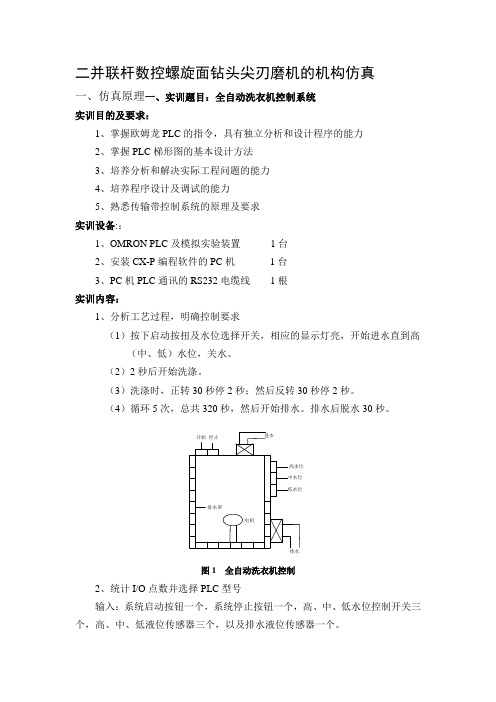
二并联杆数控螺旋面钻头尖刃磨机的机构仿真一、仿真原理一、实训题目:全自动洗衣机控制系统实训目的及要求:1、掌握欧姆龙PLC的指令,具有独立分析和设计程序的能力2、掌握PLC梯形图的基本设计方法3、培养分析和解决实际工程问题的能力4、培养程序设计及调试的能力5、熟悉传输带控制系统的原理及要求实训设备::1、OMRON PLC及模拟实验装置1台2、安装CX-P编程软件的PC机1台3、PC机PLC通讯的RS232电缆线1根实训内容:1、分析工艺过程,明确控制要求(1)按下启动按扭及水位选择开关,相应的显示灯亮,开始进水直到高(中、低)水位,关水。
(2)2秒后开始洗涤。
(3)洗涤时,正转30秒停2秒;然后反转30秒停2秒。
(4)循环5次,总共320秒,然后开始排水。
排水后脱水30秒。
图1 全自动洗衣机控制2、统计I/O点数并选择PLC型号输入:系统启动按钮一个,系统停止按钮一个,高、中、低水位控制开关三个,高、中、低液位传感器三个,以及排水液位传感器一个。
输出:进出水显示灯一盏,高、中、低水位显示灯各一盏,电机正、反转显示灯各一盏,排水、脱水显示灯灯各一盏。
PLC的型号:输入一共有9个,考虑到留有15%~20%的余量即9×(1+15%)=10.35,取整数10,所以共需10个输入点。
输出共有8个,8×(1+15%)=9.2,取整数9,所以共需9个输出点。
可以选OMRON公司的CPM1A/CPM2A 型PLC就能满足此例的要求。
3、I/O分配表1 全自动洗衣机控制I/O分配表输入输出地址名称地址名称00000 启动系统按钮01000 排水显示灯00001 高水位选择按钮01001 脱水显示灯00002 中水位选择按钮01002 进、出水显示灯00003 低水位选择按钮01003 高水位显示灯00004 排水液位传感器01004 中水位显示灯00005 停止系统按钮01005 低水位显示灯00006 高水位液位传感器01006 电机正转显示灯00007 中水位液位传感器01007 电机反转显示灯00008 低水位液位传感器4、PLC控制程序设计及分析实现功能:当按下按钮00000,中间继电器20000得电并自锁,按下停止按钮00005,中间继电器20000掉电。
Simulink机械振动仿真简例分析

1.单自由度无阻尼自由振动
运行仿真,查看示波器显示的结果
曲 线 不 光 滑 ?
1.单自由度无阻尼自由振动
打开仿真参数对话框 Ctrl+E 修改最大步长为0.01
1.单自由度无阻尼自由振动
再次运行,曲线明显光滑了许多
1.单自由度无阻尼自由振动
• 用到的模块:
积分模块,将输入信号经过数值 积分,在输出端输出相应结果。 增益模块,在输入信号基础上乘 以一个特定数据,然后输出。 示波器模块,将输入信号输入到 示波器显示出来。
据此在Simulink中画出框图
5.单自由度有阻尼+正弦激励
• 参数设置: 令k=4,m=1,c=0.2 • 初始状态: 初始速度为0,位移为0.05 • 在框图中: 分别修改对应模块的数值
5.单自由度有阻尼+正弦激励
Hale Waihona Puke • 响应趋于稳态的过程5.单自由度有阻尼+正弦激励
示波器输出为质量块的位移信号
• 参数设置:k=100N/m, m=1kg →n=10rad/s • sin wave参数:Amplitude 1; Frequency 8,10,12 • 初始状态:①x0=1, v0=0→=90; ②x0=0, v0=1→=0; ③ x0=1, v0=10→=45; ④ x0=1, v0=−10→=135; ⑤ x0=0, v0= −1→=180 Sine Wave XY Graph • XY Graph参数 1 1 s s x-min -2; x-max 2; Integrator Integrator1 Gain Scope y-min -2; y-max 2
4.衰减振荡的阻尼比的估计
• 参数:k=100,m=10, c=2 • 初始条件:x0=1, v0=0 • 初始振幅为1,约7个周期时衰减 为0.25,对数减幅: =(ln4)/70.099 阻尼比/20.032 • 理论值=0.5c(km)−0.5 0.032
实验六 SIMULINK仿真综合实验
实验6 SIMULINK 仿真综合实验一、实验目的1.熟悉Simulink 的操作环境并掌握绘制系统模型的方法。
2.掌握Simulink 中子系统模块的建立与封装技术。
3.对简单系统所给出的数学模型能转化为系统仿真模型并进行仿真分析。
二、实验设备及条件计算机一台(带有MATLAB7.0以上的软件环境)。
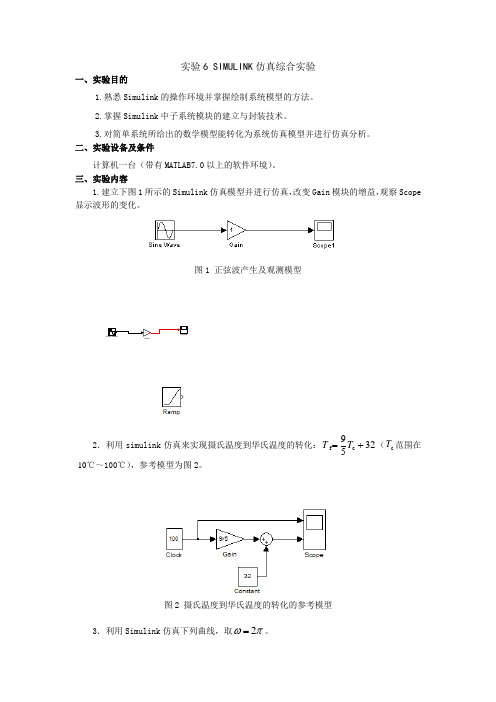
三、实验内容1.建立下图1所示的Simulink 仿真模型并进行仿真,改变Gain 模块的增益,观察Scope 显示波形的变化。
图1 正弦波产生及观测模型Sine WaveScope1Gain2.利用simulink 仿真来实现摄氏温度到华氏温度的转化:3259c f +=T T (c T 范围在-10℃~100℃),参考模型为图2。
图2 摄氏温度到华氏温度的转化的参考模型3.利用Simulink 仿真下列曲线,取πω2=。
t t t t t t x ωωωωωω9sin917sin 715sin 513sin 31sin )(++++=。
仿真参考模型如下图3,Sine Wave5模块参数设置如下图4,请仿真其结果。
图3 ()x t ω的仿真参考模型图 图4 Sine Wave5模块参数设置图4.悬吊式起重机动力学仿真悬吊式起重机结构简图 1. 悬吊式起重机动力学方程式中,mt 、mp 、I 、c 、l 、F 、x 、θ 分别为起重机的小车质量、吊重、吊重惯量、等价粘性摩擦系数、钢丝绳长(不计绳重),小车驱动力、小车位移以及())1(sin 22θl x dtd m x c F x m p t ---=&&&())2(cos 22θl dtd m g m P p p =-)3(sin cos )sin (22θθθθ&&I Pl l x dtd l m p =--小车水平方向受力方程吊绳垂直方向受力方程 小车的力矩平衡方程钢丝绳的摆角。
由(2)、(3)式去掉P ,则有2. 悬吊式起重机动力学Simulink 仿真 为便于建模,将起重机动力学方程改写为:由以上二式可建立如图所示的起重机Simulink 模型 :图中:lmp=mpl在运行仿真模型前,须先计算出k1、k2和lmp 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题目:《系统建模与仿真》在除氧水箱水位方面的应用
学院:机械自动化学院
专业:机械工程
学号:201303703055
学生姓名:吴风流
指导老师:唐秋华(老师)
日期:2014年9月
基于水箱水位调节建模与仿真
摘要
在电力生产的发展过程中,自动控制起着重要的作用。
自动控制系统仿真对保证生产的安全性、经济性和保持设备的稳定运行有重要的意义。
本文阐述水箱水位调节系统仿真的基本原理和基本步奏。
以除氧器水位控制系统进行仿真,分析如何根据生产过程内在机理、变化规律建立数学模型,并以用MATLAB软件进行仿真。
仿真结果可以预测控制系统设计或改造后的控制品质,最后达到满足生产需求的控制效果。
关键词:自动控制;仿真;MATLAB;建立数学模型
Abstract
Automatic control plays an important role in the power generation development process. Automatic control system simulation has important significance to ensure production safety, economy and stability. This paper expounds the basic principles and steps of control system simulation. For example with deaerator water level control system, how to build the mathematical model according to internal mechanism and change rule is analyzed and control system is simulated by MATLAB software. Control quality can be predicted according to simulation results of control system after design or reform, which can meet the requirement of control effect.
Key words:automatic control; simulation; MATLAB; mathematical model building
仿真是人类探索世界的重要手段,是一种基于模型的活动,建立系统的模型并使模型随着时间展开,以进行科学研究和实验室仿真研究的目的。
通过仿真在客观世界和科学认知之间架起了一座桥梁,可以方便有效地研究系统的各个方面。
PID控制至今仍占据电力生产过程控制中的90%以上的回路,对PID热工控制系统进行建模与仿真,是提高控制系统品质,降低在线调试风险的重要手段,其具有一定实际用用意义。
1建立模型仿真的目的与意义
1.1设计过程控制系统和整定调节器的参数
过程的数学模型是极其重要的基础资料,可以指导控制系统选择控制通道,确定控制方案,分析质量指标,探讨最佳工况以及调节器参数的最佳整定值等,是实现生产过程最优控制的重要基础。
1.2指导生产工艺及其设备的设计
通过对生产工艺及其设备的数学模型的分析和仿真,可以确定有关因素对整个被控过程特性的影响,(例如锅炉受热面的布置、管径大小、介质参数的选择对整个锅炉出口气温、气压等动态特性的影响),从而指导生产工艺及其设备的设计。
1.3进行仿真实验研究
在实现生产过程自动化中,往往需要对一些复杂庞大的设备进行某些实验研究,例如某单元机组及其控制系统能承受多大的冲击电负荷,当冲击电负荷过大时会造成什么后果。
对于这种破坏性的试验往往不允许在实际设备上进行,而只要根据过程的数学模型,通过计算机进行仿真研究,不需要建立小型的物理模型,从而可以节省时间和经费[1]。
2 MATLAB 简介
MATLAB 语言是由美国的Clever Moler 博士于1980年开发,功能强大、内容广发的计算机辅助设计的软件工具。
它特有的矩阵处理功能,用于控制理论研究的专用工具箱和结构图程序设计的SIMULINK 仿真环境,使得MATLAB 的应用范围非常广,包括信号和图像处理、通讯、控制系统设计、测试和测量、财务建模和分析以及计算生物学等众多应用领域。
附加的工具箱拓宽了MATLAB 环境,以解决这些应用领域内特定类型的问题。
MTLAB 包括拥有数百个内部函数的主包和30多种工具包。
工具包可以分为功能性工具包和学科工具包。
功能工具包用来扩充MATLAB的符号计算,可视化建模仿真,文字处理以及实时控制等功能。
学科工具包是专业性比较强的工具包,控制工具包,信号处理工具包,通信工具包等都属于此类[2]。
3.除氧器水箱水位调节系统建模与仿真
3.1除氧器水箱水位调节系统物理建模
除氧器水箱水位调节用的信号来源有3个,相当于三冲量水位调节。
3个信号分别是:水箱水位高度、除氧器进水量和给水流量(出水量)。
输入的3个信号进入加法器综合后,输出信号到PID 限幅调节组件,调节组件输出信号到执法组件,改变进水量的调节阀开度来保持水箱水位。
如图1所示的水箱液位控制系统,入口处的阀门由一个调节器控制,以保持水位不变,出口处的阀门由外部操纵,可将其看成一个扰动量。
系统不断有水流入水箱内,同时也有水不断由水箱中流出。
水的流入量Q 1由进水阀开度μ1控制,流出量Q 2由用户根据需要通过出水阀开度μ2来改变。
被控制水位为h ,它反映水流入和流出量之间的平衡关系。
Q 2
W e
图 1 水箱水位系统物理建模原理图
3.2建立除氧器水箱水位调节系统数学模型
水位的变化均满足下述物料平衡方程:
e i W W dt dm -= (1)
其中i W 为流入液体的质量流量,e W 为流出液体的质量流量;
假设水槽的四周是垂直的,槽内液体的质量是液体密度乘以液体体积,m=ρAh(ρ为常数),有
dt
dh A dt dm ρ= (2)
e e v W 2ρμ= (3)
假设出口横截面的面积为2μ ,箱内水面的升降速度为0v ,那么根据流量连续有:
02Av v e =μ (4)
选取微小质量dm 为研究对象,它在重力势能降低的过程中,动能增加,那么有:
()
d m g h v v dm
e =-2022
1 (5) 由(4)式和(5)式有: 2
2212A gh
v e μ-=
生产实际中一般2μ>>A ,那么近似有gh
v e 2≈(6) 综上,可得
gh W dt
A i 2dh 2ρμρ-= (7) 转换成体积流量则有
21Q Q dt dh A -= ⎪⎪⎭⎫ ⎝⎛==gh Q W Q i 2,221μρ (8)
经拉氏变换后可得到,
[])1()()(1)(2212
A K s Q s Q s K s h =-= (9) 最后由式(9)和水位控制原理图可以得出水位控制系统的数学模型,见图2
图 2 水箱液位控制系统数学模型
图2中,h r 是水箱系统水位的期望值,h 为水箱系统的实际水位,调节器可以选择比例调节器或比例积分调节器,参数未定。
为限制水位不超过规定值,在调节器后面加一限幅环节,以便使水位不发生太大变化。
1K 是电动调节阀的阀门特性洗漱,2K 是过程的放大系数。
3.3控制系统仿真
采用比例积分调节器建立Simulink 动态结构图(见图3)对水箱液位控制系统进行仿真实验。
图3 Simulink 动态结构图
3.4仿真实验的应用
(1)经测试和查阅产品说明书,确定电动调整阀门的阀门特性系数11=K ;过程放大系数1.02=K ,1012
==K A ,本实例中取05.02002==A μ,221.02,122≈==≈gh Q h h r μ。
(2)利用Simulink 动态结构图(见图3),结合参数整定试凑法,确定参数。
不断改善,直到满意为止。
经过不断仿真,得出7,4==i p T K 的Simulink 动态结构图(见图4)。
仿真曲线(见图5)表明控制系统能达到较好的动、静态性能,稳态误差为0,抗干扰性能较好。
(3)在改造后的系统,输人以上数据进行调试。
图4 7,4==i p T K 系统Simulink 动态结构图
图5 7,4==i p T K 系统Simulink 仿真曲线
3.5 系统改造后,系统测试和实际运行时的数据证明,控制系统的品质与仿真结果一致,并缩短热工人员在线确定调节器参数的时间。
4结束语
热工控制系统的建模与仿真,对热工控制系统的改造、确定自动控制系统参数性试验有一定的实际应用意义。
在相关设计完成后,可以依照建模、仿真的步骤,用于检测和预测系统控制品质。
在此次建立水箱水位调节系统建模中,我遇到了不少问题,同时学到了不少新的知识,也逐步掌握了解决新问题的方法,对以后进一步学习产生莫大的帮助。
参考文献
[1] 谢碧蓉. 热工过程自动控制技术[M]. 北京:中国电力出版社,2007.
[2] 张志涌. 精通MATLAB R2011a[M]. 北京:北京航空航天大圩出版社,2011.。