控制系统计算机仿真作业
简单控制系统python仿真实验
计算机基础理论实验四简单控制系统python仿真实验学号:13 姓名:陈严实验日期:2012/5/24实验目的:学习计算机仿真的方法。
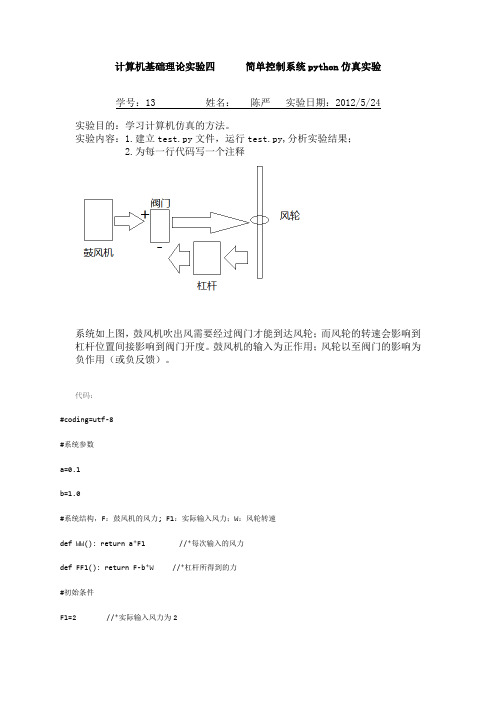
实验内容:1.建立test.py文件,运行test.py,分析实验结果;2.为每一行代码写一个注释系统如上图,鼓风机吹出风需要经过阀门才能到达风轮;而风轮的转速会影响到杠杆位置间接影响到阀门开度。
鼓风机的输入为正作用;风轮以至阀门的影响为负作用(或负反馈)。
代码:#coding=utf-8#系统参数a=0.1b=1.0#系统结构,F:鼓风机的风力; F1:实际输入风力;W:风轮转速def WW(): return a*F1 //*每次输入的风力def FF1(): return F-b*W //*杠杆所得到的力#初始条件F1=2 //*实际输入风力为2W=0.2 //*风轮转速为0.2转每秒print F1,W //*输入实际风力和转速#鼓风机风力正常F=2.2 //*鼓风机的风力为2.2 print "鼓风机风力",F //*输出鼓风机的风力#随着时间增加for t in xrange(20): //*返回一个迭代序列F1,W=FF1(),WW() //*将风力和转速进行更新print F1,W //*输出更新后的风力和转速#鼓风机风力偏大F=2.3 //*当鼓风机的风力为2.3时print "鼓风机风力",F#随着时间增加for t in xrange(20): //*返回迭代列20次F1,W=FF1(),WW() //*再次更新print F1,W //*输出实际风力和转速#鼓风机风力偏小F=2.2 //*当风力为2.2时print "鼓风机风力",F#随着时间增加for t in xrange(20): //*在f=2.2时,再次迭代 F1,W=FF1(),WW()print F1,W实验结果:从结果上,风力偏小时,感觉风轮转速W有点振荡;风力偏大时,比较平稳如果装个matplotlib画个曲线图就更好了风力偏小时,分析结果:转速是风力F的函数,当感觉风轮转速W有点振荡;风力偏大时,比较平稳二者之间成正相关。
(完整版)控制系统数字仿真题库

控制系统数字仿真题库一、填空题1. 定义一个系统时,首先要确定系统的边界;边界确定了系统的范围,边界以外对系统的作用称为系统的输入,系统对边界以为环境的作用称为系统的输出。
2.系统的三大要素为:实体、属性和活动。
3.人们描述系统的常见术语为:实体、属性、事件和活动。
4.人们经常把系统分成四类,它们分别为:连续系统、离散系统、采样数据系统和离散-连续系统。
5、根据系统的属性可以将系统分成两大类:工程系统和非工程系统。
6.根据描述方法不同,离散系统可以分为:离散时间系统和离散事件系统。
7. 系统是指相互联系又相互作用的实体的有机组合。
8.根据模型的表达形式,模型可以分为物理模型和数学模型二大类,其中数学模型根据数学表达形式的不同可分为二种,分别为:静态模型和动态模型。
9、采用一定比例按照真实系统的样子制作的模型称为物理模型,用数学表达式来描述系统内在规律的模型称为数学模型。
10.静态模型的数学表达形式一般是代数方程和逻辑关系表达式等,而动态模型的数学表达形式一般是微分方程和差分方程。
11.系统模型根据描述变量的函数关系可以分类为线性模型和非线性模型。
12 仿真模型的校核是指检验数字仿真模型和数学模型是否一致。
13.仿真模型的验证是指检验数字仿真模型和实际系统是否一致。
14.计算机仿真的三个要素为:系统、模型与计算机。
15.系统仿真的三个基本活动是系统建模、仿真建模和仿真试验。
16.系统仿真根据模型种类的不同可分为:物理仿真、数学仿真和数学-物理混合仿真。
17.根据仿真应用目的的不同,人们经常把计算机仿真应用分为四类,分别为:系统分析、系统设计、理论验证和人员训练。
18.计算机仿真是指将模型在计算机上进行实验的过程。
19. 仿真依据的基本原则是:相似原理。
20. 连续系统仿真中常见的一对矛盾为计算速度和计算精度。
21.保持器是一种将离散时间信号恢复成连续信号的装置。
22.零阶保持器能较好地再现阶跃信号。
《自动控制系统计算机仿真》习题参考答案
《自动控制系统计算机仿真》习题参考答案1-1 什么是仿真? 它的主要优点是什么?它所遵循的基本原则是什么?答:所谓仿真,就是使用其它相似的系统来模仿真实的需要研究的系统。
计算机仿真是指以数字计算机为主要工具,编写并且运行反映真实系统运行状况的程序。
对计算机输出的信息进行分析和研究,从而对实际系统运行状态和演化规律进行综合评估与预测。
它是非常重要的设计自动控制系统或者评价系统性能和功能的一种技术手段。
仿真的主要优点是:方便快捷、成本低廉、工作效率和计算精度都很高。
它所遵循的基本原则是相似性原理。
1-2 你认为计算机仿真的发展方向是什么?答:向模型更加准确的方向发展,向虚拟现实技术,以及高技术智能化、一体化方向发展。
向更加广阔的时空发展。
1-3 计算机数字仿真包括哪些要素?它们的关系如何?答:计算机仿真的三要素是:系统——研究的对象、模型——系统的抽象、计算机——仿真的工具和手段。
它们的关系是相互依存。
2-1 控制算法的步长应该如何选择?答:控制算法步长的选择应该恰当。
如果步长太小,就会增加迭代次数,增加计算量;如果步长太大,计算误差将显著增加,甚至造成计算结果失真。
2-2 通常控制系统的建模有哪几种方法?答:1)机理建模法;2)实验建模法;3)综合建模法。
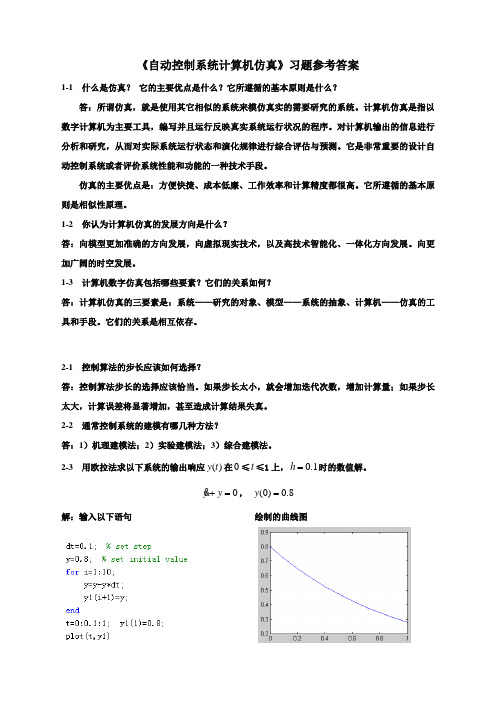
2-3 用欧拉法求以下系统的输出响应()y t 在0≤t ≤1上,0.1h =时的数值解。
0yy += , (0)0.8y = 解:输入以下语句 绘制的曲线图2-4 用二阶龙格-库塔法对2-3题求数值解,并且比较两种方法的结果。
解:输入以下语句绘制的曲线图经过比较两种方法的结果,发现它们几乎没有什么差别。
3-1 编写两个m文件,分别使用for和while循环语句计算20031kk=∑。
解:第1个m文件,第2个m文件运行结果都是3-2 求解以下线性代数方程:123102211313121xxx⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦解:输入语句计算结果3-3 已知矩阵013=121542⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦A,218=414332⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦B试分别求出A阵和B阵的秩、转置、行列式、逆矩阵以及特征值。
“控制系统计算机仿真”实验教学改革
制系 统仿真方 法 、采样控 制 系统仿 真方法 以及快 速 数字仿 真 。课程 安 排在 四年级第 七学 期 ,共计3 学 2
时 。 由于学 时较少 ,不少 教授 该课 程 的学 校忽视 了
实验 方 式与基 本要求 :( )学 生必 须认 真做好 1
课前 预 习 ,了解实验 目的和要 求 、原理 步骤 及注 意
事项 ;()实 验方式为运用MATL 2 A附 真软件在计 算机 上进 行 建模 和 仿真 ; ( )实 验 课一 般 1 为一 3 人
实验 教学环节 ,从 而导致 理论 与实 践脱节 ,学生 的
中国 电力教 育20 年第5 06 期
维普资讯
教改视角
维普资讯
教改视角 一 一
JAOGAI JAO I SH院
王雪松
程玉虎
马小平
巩敦卫
系统仿 真是根 据真 实系 统的物 理模 型或 数学模
型 ,利 用计算机 或实 物 、半 实物 ,建 造一个模 拟 系 统 ,在模 拟系统上 进 行观测 、实验 和分 析 ,从而达 到 认识 、理解和 控制 真实 系统 的 目的 。控制 系统计 算机仿真 是一 门建立 在控制 理论 、数值 方法 、计算 机 技术 、系统工程 和控 制工 程基础 上 的综合性 实验 学 科 ,它 已成 为 自动控 制 学科 的 一 支分 支n 目 ¨。 前 ,近乎 所有 的高 品质 的控 制都 离不 开系统仿 真研 究 。利用仿 真工 具对控 制系 统进行 设计 与仿真 ,可
在新 的课 程 体系 中 ,新增 了6 学 时 的综 合 性 个 实 验环节 。新 增实验 环节 的 目的在于 :理论 与实 践
相结 合 ,通 过 实验教 学来 验证 和巩 固所 学 的理 论 知 识 ,训练学生 正确使用MATL 仿真软件 ,掌握 基 AB
控制系统计算机仿真课程设计

控制系统计算机仿真课程设计前言计算机仿真作为一个重要的工具,在控制系统的设计和实现中发挥着重要作用。
本文将介绍控制系统计算机仿真课程设计的内容和步骤,并结合一个实际的案例阐述如何利用计算机仿真技术进行控制系统设计。
设计内容和步骤设计内容控制系统计算机仿真课程的设计内容通常包括以下几个方面:1.系统建模:选择合适的控制模型,建立数学模型和仿真模型。
2.系统分析:分析系统的稳态和暂态响应,优化控制系统的性能。
3.控制器设计:设计合适的控制器结构和参数,实现闭环控制。
4.系统仿真:利用计算机仿真软件进行系统仿真,并分析仿真结果。
5.实验验证:通过实验验证仿真结果的正确性,进一步优化控制系统的性能。
设计步骤控制系统计算机仿真课程的设计步骤可以分为以下几个部分:1.系统建模掌握控制系统建模方法,能够从实际物理系统中抽象出控制对象、控制器等模型,建立相应的数学模型和仿真模型。
2.系统分析使用数学分析方法,分析系统的稳态和暂态响应,评估控制系统的性能。
包括评估系统的稳定性、快速性、抗干扰性等。
3.控制器设计使用控制理论,设计合适的控制器结构和参数,实现闭环控制。
掌握 PID、根轨迹、频域等控制器设计方法,能够根据系统要求选择合适的控制器。
4.系统仿真使用计算机仿真软件,进行系统仿真,验证控制系统的性能和预测实际系统行为。
掌握仿真软件的使用方法,能够进行仿真实验设计、仿真模型编写、仿真实验执行等。
5.实验验证在实验室、车间等实际环境中,利用实验设备和仪器对控制系统进行实验验证,验证仿真结果的正确性。
并通过实验优化控制器参数,提高控制系统的性能。
实例分析在本节中,我们将结合一个实际的案例,介绍控制系统的计算机仿真课程设计。
案例背景某高速公路入口处的车道管理系统由计算机控制,通过红绿灯控制车辆的通行。
系统从入口指示车辆能否进入高速公路,在出口将车辆计数和收费。
由于车辆的流量较大,系统的控制效果受到影响,需要进行优化。
“过程控制系统”的计算机仿真实验教学

() 1燃烧炉蒸汽压力控制和燃料空气比值控制
A
燃料流量被空对象为: ( 一击 G )
10 5 T 1
燃料流量至蒸汽压力关系为 : O)一 3 G 蒸汽压力至燃料流量关系为: () l Gs一
收稿 日 : 0 6 O 7 修 回 日 :o 6 1 0 期 2 O —1 一1 } 期 2 o —1 3 第 一作者 : 方清城(99 )男, 16 - , 广东揭阳人 , 实验师 , 从事电力电子技术 与控制系统的实验教学 。
Hale Waihona Puke 统组成 : 蒸汽压力控制系统 、 燃料空气比值控制系统 和炉膛负压控制系统 。其原理方框图如图 1 所示。
12 系统辩识 .
1 基于 Smuik实验仿真 i l n
Sm l k i ui 是一种用 于实现计算机 仿真 的软件 n 工具 , 它是 Mal t b的一个附加组件, a 用来提供一个 系统级的建模与动态仿真工作平台。仿真实验的主
S se ,ti p p r nr d cst d 1 rcs o to sse b o t r alb Smuik y tm hs a e t u e mo e ap oe s n r1 y tm ys f i o o c waeM t / i l .Th i a n es mu
Ex e i n a a h n f“ r c s n r lS se ”Ba e n S mu a in p rme t lTe c i g o P o e sCo t o y tm s d o i l to
F N n -hn , U h n - a g A G Qige e g L O Z o gl n i
控制工程基础-控制系统的计算机仿真

计算机仿真在电子工程中用于模拟电路系 统和数字系统的行为,进行电路设计和优 化。
04 控制系统的计算机仿真
控制系统的数学模型
线性时不变系统
描述系统的动态行为,通过微分方程、差分方程等数学表达式表 示。
传递函数
描述系统输入与输出之间的关系,通过传递函数进行描述。
状态空间模型
描述系统的动态行为,通过状态方程和输统
开环控制系统是指系统中没有反馈回路的系统,输入信号 直接作用于受控对象,输出信号与输入信号之间的关系是 固定的。
线性控制系统
线性控制系统是指系统中各元件之间的关系可以用线性方 程描述的系统。
闭环控制系统
闭环控制系统是指系统中具有反馈回路的系统,输出信号 通过反馈回路回到输入端,控制器根据反馈信号调整输入 信号,以实现控制目标。
03
计算机资源的限制
大规模的控制系统仿真可能需要 较高的计算机资源,如内存和计 算能力。
未来发展方向与展望
混合仿真
结合物理实验和计算机仿真,以提高仿真的 准确性和可信度。
多尺度仿真
考虑系统不同尺度的特性和行为,以更全面 地模拟和控制复杂系统。
高性能计算
利用高性能计算机和并行计算技术,提高大 规模控制系统的仿真效率。
智能化仿真
结合人工智能和机器学习技术,实现自适应 和智能化的仿真和控制。
THANKS FOR WATCHING
感谢您的观看
多输入多输出系统仿真
总结词
多输入多输出系统是指具有多个输入信号和多个输出信号的控制系统。
详细描述
多输入多输出系统在工业控制中应用广泛,如机器人、飞行器等。通过计算机仿真,可以模拟系统的动态行为, 分析系统的稳定性和性能,优化控制策略。
计算机仿真练习题

一、已知微分方程及初值如下,将其化成状态空间表达式,并给出状态变量的初值。
二、设一物理系统为求其可观标准型实现并给出状态变量初值。
三、设求其标准型实现。
四、现给定一个二阶系统的传递函数,求仿真数学模型。
计算步长为T=1s 。
五、在一个数字驾驶仪中有一个数字校正环节,它的采样周期 ,它的脉冲传递函数为(1)若用 来进行数字仿真,求用差分方程来表示的仿真模型。
(2)今要求仿真时 ,那么仿真模型应当怎样变化呢?六、R —L —C 串联电路,建立该系统的微分方程。
求状态空间表达式七、传递函数为求其单位阶跃响应表达式,计算系统的过渡过程调节时间,分析系统的性能特点()()()()()()4020100023127222233=====++=++uu y y y t u dt du dt u d dt dy dt y d dt y d (),1216716174232+++++=s s s s s s G 12.01)()()(2++==s s s x s y s G s Ts 04.0=⎪⎭⎫ ⎝⎛--==64.098.062.2)()()(z z z u z y z D s Ts 04.0=s s T 1.0'=。
R L Ur Uc210)(+=s s G八、机械位移系统,由弹簧—质量—阻尼器构成。
分析仿真系统九、已知某控制系统的微分方程为:将其分别表示为传递函数、一阶微分方程组和状态空间描述。
十、已知某控制系统的传递函数为:将系统模型转换为状态空间描述和一阶微分方程组描述。
十一、已知一阶系统的微分方程为、初始条件 ,取仿真步长h=x ,分别用欧拉法、梯形法和龙格—库塔法计算十二、某数字控制系统,其输入为单位阶跃,即r (t )=1(t ),采样周期T =Xs 。
试求系统在各采样时刻的输出y (k ) 。
y (位移)(阻尼器阻力)(弹簧力)F ) u dtdu y dt dy dt y d 10265.222+=++34285)()()(232+++++==S S S S S s U s Y s G。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
兰州理工大学《控制系统计算机仿真》上机报告Ⅰ院系:电气工程与信息工程学院班级:14级自动化3班姓名:**学号: **********时间: 2017 年 6 月 15 日电气工程与信息工程学院《控制系统计算机仿真》上机实验任务书Ⅰ(2017)一、上机实验内容及要求1.matlab软件要求利用课余时间熟悉掌握matlab软件的基本数值运算、基本符号运算、基本程序设计方法及常用的图形命令操作。
2.各章节仿真实验内容及要求具体实验内容及要求请详见上机实验报告。
二、上机实验时间安排及相关事宜1.依据课程教学大纲要求,上机实验学时共16学时,学生须在每次上机之前做好相应的准备工作,以确保在有限的机时内完成仿真实验要求的内容;2.实验完成后按规定完成相关的仿真实验报告;3.仿真实验报告请按有关样本制作并A4打印,侧面装订,作为成绩评定的一部分。
自动化系《控制系统计算机仿真》课程组2017年3月一、Matlab 基础操作1-1用MATLAB 语言求下列系统的状态方程、传递函数、零极点增益和部分分式形式的模型参数,并分别写出其相应的数学模型表达式:(1)2450351024247)(23423+++++++=s s s s s s s s G程序如下:num=[7,24,24]den=[10,35,50,24][A,B,C,D]=tf2ss(num,den)系统的状态方程:A =-3.5000 -5.0000 -2.40001.0000 0 00 1.0000 0B =1C =0.7000 2.4000 2.4000D =零极点增益形式:[Z,P,K]=tf2zp(num,den)Z =-1.7143 + 0.6999i-1.7143 - 0.6999iP =-1.2973 + 0.9838i-1.2973 - 0.9838i-0.9053K =0.7000部分分式:[R,P,H]=residue(num,den)R =-0.0071 - 0.2939i-0.0071 + 0.2939i0.7141P =-1.2973 + 0.9838i-1.2973 - 0.9838i-0.9053H =[](2)u X X ⋅⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------------=⋅022475.025.075.125.1125.15.025.025.025.125.425.25.025.1525.2 []X y 2020=A=[2.25 -5 -1.25 -0.5;2.25 -4.25 -1.25 -0.25;0.25 -0.5 -1.25 -1;1.25 -1.75 -0.25 -0.75]A =2.2500 -5.0000 -1.2500 -0.50002.2500 -4.2500 -1.2500 -0.25000.2500 -0.5000 -1.2500 -1.00001.2500 -1.7500 -0.2500 -0.7500 >> B=[4;2;2;0]B =422>> C=[0 2 0 2]C =0 2 0 2>> D=0D =零极点增益形式:>> [Z,P,K]=ss2zp(A,B,C,D)Z =-1.0000 + 1.2247i-1.0000 - 1.2247i-1.5000P =-0.5000 + 0.8660i-0.5000 - 0.8660i-1.5000 + 0.0000i-1.5000 - 0.0000iK =4.0000传递函数形式:>> num=[0 4 14 22 15]num =0 4 14 22 15>> den=[1 4 6.25 5.25 2.25]den =1.0000 4.0000 6.2500 5.25002.2500部分分式:>> [R ,P ,H]=residue(num,den)R =4.0000-0.00000.0000 - 2.3094i0.0000 + 2.3094iP =-1.5000-1.5000-0.5000 + 0.8660i-0.5000 - 0.8660iH =[]1-2 用殴拉法matlab 编程实现下列系统的输出响应)(t y 在10≤≤t 上,1.0=h 时的数值解。
y y -=',1)0(=y要求保留4位小数,并将结果以图形的方式与真解t e t y -=)(比较。
t=0:0.1:1t =Columns 1 through 90 0.1000 0.2000 0.3000 0.4000 0.5000 0.6000 0.7000 0.8000Columns 10 through 110.9000 1.0000h=0.1;y(1)=1;t=0:0.1:1;h=0.1;y(1)=1;for i=1:10y(i+1)=y(i)+h*(-1*y(i));endplot(t,y,'r')hold onm=exp(-1*t)m =Columns 1 through 91.0000 0.9048 0.8187 0.7408 0.6703 0.6065 0.5488 0.4966 0.4493Columns 10 through 110.4066 0.3679plot(t,m,'bo')00.10.20.30.40.50.60.70.80.911-3 用四阶龙格-库塔梯形法matlab编程实现1-2题的数值解,要求以图形的方式通过与真值及殴拉法的比较,分析其精度。
h=0.1;y(1)=1;t=0:0.1:1t =Columns 1 through 90 0.1000 0.2000 0.3000 0.4000 0.5000 0.6000 0.7000 0.8000Columns 10 through 110.9000 1.0000for i=1:10k1=-1*y(i)k2=-1*(y(i)+k1*h/2)k3=-1*(y(i)+k2*h/2)k4=-1*(y(i)+h*k3)y(i+1)=y(i)+(k1+2*k2+2*k3+k4)*h/6endk1 =-1k2 =-0.9500k3 =-0.9525k4 =-0.9047y =1.0000 0.9048 k1 =-0.9048k2 =-0.8596k3 =-0.8619k4 =-0.8187y =1.0000 0.9048 0.8187k1 =-0.8187k2 =-0.7778k3 =-0.7798k4 =-0.7407y =1.0000 0.9048 0.8187 0.7408 k1 =-0.7408k2 =-0.7038k3 =-0.7056k4 =-0.6703y =1.0000 0.9048 0.8187 0.7408 0.6703k1 =-0.6703k2 =-0.6368k3 =-0.6385k4 =-0.6065y =1.0000 0.9048 0.8187 0.7408 0.6703 0.6065 k1 =-0.6065k2 =-0.5762k3 =-0.5777k4 =-0.5488y =1.0000 0.9048 0.8187 0.7408 0.6703 0.6065 0.5488k1 =-0.5488k2 =-0.5214k3 =-0.5227k4 =-0.4965y =1.0000 0.9048 0.8187 0.7408 0.6703 0.6065 0.5488 0.4966k1 =-0.4966k2 =-0.4718k3 =-0.4730k4 =-0.4493y =1.0000 0.9048 0.8187 0.7408 0.6703 0.6065 0.5488 0.4966 0.4493k1 =-0.4493k2 =-0.4269k3 =-0.4280k4 =-0.4065y =Columns 1 through 91.0000 0.9048 0.8187 0.7408 0.6703 0.6065 0.5488 0.4966 0.4493Column 100.4066k1 =-0.4066k2 =-0.3862k3 =-0.3873k4 =-0.3678y =Columns 1 through 91.0000 0.9048 0.8187 0.7408 0.6703 0.6065 0.5488 0.4966 0.4493Columns 10 through 110.4066 0.3679plot(t,y,'o')hold onm=exp(-1*t)plot(t,m,'r*')lea=y-mplot(t,lea,'g')hold offm =Columns 1 through 81.0000 0.9048 0.8187 0.7408 0.6703 0.6065 0.5488 0.4966Columns 9 through 110.4493 0.4066 0.3679lea =1.0e-006 *Columns 1 through 80 0.0820 0.1483 0.2013 0.2429 0.2747 0.2983 0.3149Columns 9 through 110.3256 0.3315 0.33321-4采用matlab 语言编程实现∑==6302i i k 。
程序:disp('y=') h=1; y=0;for i=0:1:63 y=y+2^i; enddisp(y); 运行结果: y=1.8447e+019 y=1.8447e+0191-5编写matlab 的M-函数,以实现∑==mi i k 02。
要求在函数中给出必要的解释和说明,同时检测输入和返回变量的个数。
function sum=zuoye5(m) sum=0;0.10.20.30.40.50.60.70.80.91format long for i=0:m t=1;for j=1:i t=t*2; end sum=sum+t; end二、控制系统分析2-1设典型闭环结构控制系统如下图所示,当阶跃输入幅值20=R 时,用sp3_1.m 求取输出y(t)的响应。
进一步考虑:当反馈通道为ss H 1.011)(+=时,如何通过对sp3_1.m 程序的修改,以实现此时所对应的y(t)。
解:程序1:clear all;close all;a=[0.016 0.864 3.27 3.42 1]; b=[30 25];V=2;R=20;X0=[0 0 0 0];n=4;T0=0;Tf=10;h=0.01; b=b/a(1);a=a/a(1);A=a(2:n+1);A=[rot90(rot90(eye(n-1,n)));-fliplr(A)]; B=[zeros(1,n-1),1]'; m1=length(b);C=[fliplr(b),zeros(1,n-m1)]; Ab=A-B*C*V; X=X0';y=0;t=T0; N=round(Tf-T0)/h; for i=1:N K1=Ab*X+B*R;K2=Ab*(X+h*K1/2)+B*R; K3=Ab*(X+h*K2/2)+B*R; K4=Ab*(X+h*K3)+B*R;X=X+h*(K1+K2*2+K3*2+K4)/6; y=[y,C*X]; t=[t,t(i)+h];y(t)r(t)_2[t',y']plot(t,y,'b-')title('反馈系数为2时的阶跃响应曲线');hold on; grid on程序2:clear all;close all;a=[0.016 0.864 3.27 3.42 1];b=[30 25];a1=conv(a,[0.1 1]);b1=b;b1=b1/a1(1);a1=a1/a1(1);m1=length(b1);b=b/a(1);a=a/a(1);m=length(b);V=1;R=20;T0=0;Tf=15;h=0.01;X10=[0 0 0 0 0];n1=5;X0=[0 0 0 0];n=4;A1=a1(2:n1+1);A=a(2:n+1);C1=[fliplr(b1),zeros(1,n1-m1)];C=[fliplr(b),zeros(1,n-m)];A1=[rot90(rot90(eye(n1-1,n1)));-fliplr(A1)]; A=[rot90(rot90(eye(n-1,n)));-fliplr(A)];B1=[zeros(1,n1-1),1]';B=[zeros(1,n-1),1]';Ab=A1-B1*C1*V;X1=X10';y1=0;t=T0;N=round(Tf-T0)/h;for i=1:N;K1=Ab*X1+B1*R;K2=Ab*(X1+h*K1/2)+B1*R;K3=Ab*(X1+h*K2/2)+B1*R;K4=Ab*(X1+h*K3)+B1*R;X1=X1+h*(K1+K2*2+K3*2+K4)/6;y1=[y1,C1*X1];t=[t,t(i)+h];endX=X0';y=0;t=T0;for i=1:NK1=A*X+B*(R-y1(i));K2=A*(X+h*K1/2)+B*(R-y1(i));K3=A*(X+h*K2/2)+B*(R-y1(i));K4=A*(X+h*K3)+B*(R-y1(i));X=X+h*(K1+K2*2+K3*2+K4)/6;y=[y,C*X];t=[t,t(i)+h];[t',y']plot(t,y,'r-');title('反馈通道为惯性环节时的阶跃响应曲线'); hold on;grid on2-2 下图中,若各环节传递函数已知为:s s G 01.011)(1+=,sss G 085.017.01)(2+=,s s G 01.011)(3+=,s s s G 051.015.01)(4+=,s s G 0067.0170)(5+=,s s G 15.0121.0)(6+=,s s G 130)(7=,s s G 01.011.0)(8+=,ss G 01.010044.0)(9+=, 212.0)(10=s G ;试列写链接矩阵W 、W 0和非零元素阵W IJ ,将程序sp4_2完善后,应用此程序求输出7y 的响应曲线。