全数字接收机中的载波恢复算法研究
全数字接收机中的载波恢复算法研究
直 接对 接 收信 号 的相角 进行 处理 , 完成 载波 频率 的快 速 捕 获 和载 波 相位 的跟 踪 . 论 分 析 和计 算 机 仿 真 表 明 , 理 该 算法 简 单有 效 , 运算 量小 , 于用 D P器 件来 实 现 , 便 S 适用 性强 . 关 键词 : 载波恢 复 ; 载波 同步 ; 数字信 号 处理
信 息 和 载 波 相位 信 息. 于这 种 考 虑 , 者 提 出 了 基 笔
对 r t 的相 角 进 行 处 理 的 载 波 恢 复 和 解 调 方 案 , () 称 之 为相 位 处理 载 波恢 复 法 . 下 面 给 出 r t 的 相 角 表 达 式 . 过 正 交 解 调 () 经
全 数 字 接 收 机 中 的 载 波 恢 复 算 法 研 究
袁清升 , 陈 慧 , 定杰 , 徐 袁赣 南
( 尔 滨 工 程 大 学 自动 化 学 院 , 龙 江 哈 尔 滨 哈 黑 10 0 ) 5 0 1
摘
要 :针对 数 字信 号传 输 同步接 收机 的 数字化 实 现 , 出 了一 种 载波 同步 新算 法 即相位 处 理 载 波恢 复 法 . 提 它
r c ie s t a s l g t i e e v r h t i a ldi ia mplme ai n f r c ie s o r s n hr no diia d t r ns s i n. I r c l l e ntto o e ev r f y c o us g t l a a ta miso t die ty
独 立 的 固 定 振 荡 器 产 生 , 需 要 反 馈 控 制 , 传 统 不 而
的相 干 解 调 的所 有 其 它 功 能 , 载 波 相 位 的调 整 , 如
相位处理载波恢复算法研究

信 息 与 电 子 工 程
p( k ) = mod( ϕ k + θ k + nθ ( k ))
p( k + 1 ) = mod( ϕ k +1 + θ k +1 + nθ ( k + 1 ))
第1卷
两式相减,得
V ( k ) = mod( p( k + 1 ) − p( k )) %θ ( k )) = mod( ∆ϕ k + Ω + n %θ ( k ) = mod( nθ ( k + 1 ) − nθ ( k )) 其中: ∆ϕ k = mod( ϕ k +1 − ϕ k ) , n
由式(5)计算 W(k)
判决
ˆk ∆ϕ
p(k)
由式(4)计算 Ω
k
估计算法
ˆ Ω k
图3
载波频率估计算法结构图
ˆ 的算法。 下面推导估计 Ω k +1
a) 统计平均法 假定在一段时间长度 NT 的观测区间内,已知载波频差 Ω 的 N 个观测值 Ω k − N +1 ,Ω k − N +2 ,L ,Ω k , 求估计值
第1卷 第2期 2003 年 6 月
信
息
与
电
子
工
程
INFORMATION AND ELECTRONIC ENGINEERING
Vol.1, No.2 Jun.,2003
文章编号:1672-2892(2003)02-0036-05
相位处理载波恢复算法研究
袁清升 1,刘 文2
(1.上海交通大学,上海 200030; 2. 哈尔滨工程大学, 黑龙江 哈尔滨 150001)
一种改进的DTMB单载波系统载波恢复算法

,相关T,发送端轭,则接收端收到的同步帧头信号可表信号与本地PN序列滑动相关输出为:当滑至两个PN序列对齐时,相关峰模值为:式(2)中A为给出了对应不同的归一化频偏可以看出,载会使相关峰模值产生衰减。
在频偏比较大时,相关峰模值急剧下图1 载波频偏对相关模值的影响其中,L为595。
根据最大似然准则,当达到最大值时,此时对式(3)取相角,就可以得到粗频偏估计的最大似然估计值为:式中:arg()为取相角运算,单倍符号速率。
调整后的剩余频偏将,上的频偏值,由式(3)我们可以很容易的知道,此时接收信号与本地(5)由式(5)可知,当有最大值,所以估计的大频。
对于DTMB单载波取进行粗扫频,然后再以频偏差,需要在采样恢复之后再利用的时域循环特性进行细频偏估计,式中,A为采样恢复两帧帧头相关模值的应该落入图3中组2,因此,第一轮的粗扫频后,得到的相关峰模值如图5(a)所示,接下来进行第二轮粗扫频,再根据表1和图3,确定-100kHz 离组2中的代号为“-6”的频点更近,此时的相关峰模值如图5(b)所示,此时可得粗扫频的结果为-103680Hz。
细扫频:根据表1和图4,-103680Hz 应该落入图4中组2,因此,第一轮的细扫频后,得到的相关峰模值如图5(c)所示,接下来进行第二轮细扫频,再根据表1和图4,确定-103680Hz 离组2中的代号为“2”的频点更近,此时的相关峰模值如图5(d)所示。
因此,由表1可知经过变步长扫频后估计出的扫频频偏(没有包括频偏粗估计部分)。
由上可知,频点的分组决定了扫频的次数,因此,如何分组就显得尤为重要。
频点分组的划分要让每组的频点数都为奇数且不少于3,显然小于3是没有意义的,这样做的目的是为了更好地选择每组的中间频点。
由表1可知,粗扫频频点一共有23个,按照上面所分析的原则,粗扫频频点可以有两种分组情况,一种是(9,9,5),也就是分为3组,一组有5个频点,另外两组有9个频点,这样分组最多需要扫频图5 粗、细扫频过程表2 各种载波估计算法比较载波算法最多扫频次数纠偏范围不变步长扫频231次[-200kHz,200kHz]变步长扫频44次[-200kHz,200kHz]本文算法20次[-200kHz,200kHz]图6 系统频偏估计均方误差图7 系统残余频偏《有线电视技术》 2016年第4期 总第316期。
全数字接收机中定时恢复的研究
(1 St t y La r t y ofO p i a m m unia i c ol i sa . a e Ke bo a or tc lCo c ton Te hn og e nd Net or w ks,W u n 4 07 ha 30 4,Chi na; 2 W uha o . n H ngx n T ee o m u c to c ol i sCo., Lt i lc m nia i n Te hn og e d.,W u n 4 07 ha 30 4,Chi ) na Absr c : Ti i g r c ve y i o he ta t m n e o r s ne oft ke e hn o e f al i t l e eve s O n t b s s o he on nto lt o y o y t c olgis or l gia r c i r . d he a i f t c ve ina he r f G a dne i ig r c e y,a m o fe tm i g e o r e hod s t did. A n i pr e n e po a i c r r tm n e ov r dii d i n r c ve y m t i s u e m ov d i t r l ton onfgu a i s r po e i r ton i p o s d
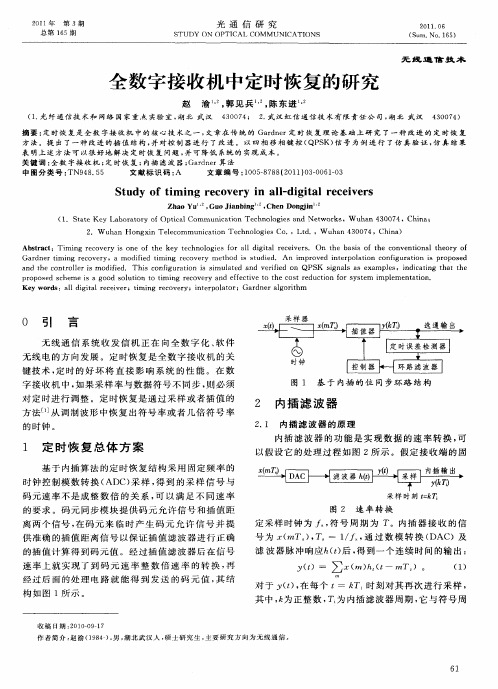
图 1 基 于 内插 的 位 同 步 环 路 结 构
方 法n 从 调 制波 形 中恢 复 出符 号 率或 者 几倍 符号 率
的时钟 。
2 内 插 滤的 原 理 .
1 定 时 恢 复 总 体 方 案
基于QAM载波恢复算法的研究
基于QAM载波恢复算法的研究作者:郭铭铭夏文娟窦建华来源:《现代电子技术》2014年第16期摘要:针对高阶QAM调制解调系统对载波偏移的敏感性问题,采用一种基于导频、扫频环路和载波恢复环路的高阶QAM载波恢复方法。
这里设计的扫频环路是由帧检测、扫频、频率校正三个模块组成,载波恢复环路由极性判决算法模块和判决导向模块组成。
扫频和极性判决算法都具有较大的频偏捕获能力。
两者联合用于载波频偏的捕获阶段,既克服了一般扫频算法残留频偏大的困难,也解决了极性算法可用角点少的问题。
关键词:正交幅度调制;扫频;极性判决;载波恢复中图分类号: TN83⁃34 文献标识码: A 文章编号: 1004⁃373X(2014)16⁃0021⁃03Research on QAM⁃based carrier recovery methodGUO Ming⁃ming1, XIA Wen⁃juan2, DOU Jian⁃hua1(1. Hefei University of Technology, Hefei 230009, China;2. Anhui Bowei Chang’an Electronics Co., Ltd., Hefei 237010, China)Abstract: In order to solve the sensitivity problem of high⁃order quadrature amplitude modulation (QAM) modulation and demodulation system for carrier offset, a new high⁃order QAM carrier recovery method based on pilot frequency, frequency sweep loop and carrier recovery loop is proposed. The frequency sweep loop is comprised of three modules of frame detection,frequency sweep and frequency correction. The carrier recovery loop contains the polarity decision algorithm module and decision⁃directed (DD) module. The frequency sweep and polarity decision algorithm both have large frequency offset acquisition ability. If They are applied jointly to the stage of frequency offset acquisition, the difficulty of larger residual frequency offset caused by general sweep algorithm can be overcome and the problem of polarity algorithm with little available corner can be solved.Keywords: quadrature amplitude modulation; frequency sweep; polarity decision; carrier recovery0 引言正交幅度调制(Quadrature Amplitude Modulation,QAM)是一种在I、Q两路正交载波信号上进行幅度调制的调制方式,它是一种幅度和相位的联合键控,其幅度和相位都携带有效信息。
基于LMS算法对数字通信接收器中载波恢复系统的研究
北
京
交
通
大
学
学
报
Vo 1 . 3 7 No . 2
AD r .2 01 3
0F B EI 1 I NG J I A 01 ℃ I G UNI V
文章编号 : 1 6 7 3 — 0 2 9 1 ( 2 0 1 3 ) 0 2 — 0 0 4 4 — 0 5
利用信号星座 图和相位差功率谱直观看 出了算法的补偿效果 . 结果证明: 对单频率相位抖动能够衰 减2 5 d B左右 , 双频率能够衰减 1 5 d B左右 ; 经 系统补偿后信号和只含有高斯白噪 声的数字信号星
座 图非 常接 近 . 。 文献 标 志码 : A
关键词 : 载波恢复; 多普勒频移 ; 相位抖动 ; L MS算法
J I NG Qi n g f e n g ,S HI L e i ,Z HONG We i z h i ,LU Y u p i n g ,Y AN Xi a o j u
( 1 . C o l l e g e o f A s t r o n a u t i c s ,N a n j i n g Un i v e r s i t y o f A e on r a u t i c s a n d st A on r a u t i s,N c a n j i n g 2 1 0 0 1 6 , C h i n a ;
p h a s e o f f s e t d u e t o D o p p l e r s h i f t a n d s i n u s o i d p h a s e j i t t e r s wi t h s i n g l e o r mu l t i p l e t o n e s . T a k i n g 8 P S K
数字通信系统中的载波恢复技术初探
技术Special TechnologyDI G I T C W 专题50DIGITCW2020.010 引言在数字时代,传统领域快速变革,数字化是当下电视、电话发展的重要趋势。
数字化不仅仅可以让多种设备获得相比于传统状态下更高的性能,还能够获得更多新功能,推动设备进行崭新的时代。
以数字电视为例,目前国外存在DVB_C 标准与16VSB 标准,国内标准还处于发展、研究阶段,但也取得了进步。
1 数字通信与载波恢复1.1 数字通信数字通信是指采用数字的形式传输信号或者采用数字的方式调制载波信号后传输,进而实现通信。
传统电话、电视均为模拟通信形式。
数字化时代下,电话与电视通信出现变化,即数字化通信,称其为数字电话、数字电视。
即是说,传输的信息本质上表现为数字,以不同计算机设备为终端,实现通信。
此外,卫星通信多路通信也是数字通信的一种。
1.2 载波恢复我们可以将载波恢复直接解释为载波的恢复,它是指从已经传输的信号中恢复原有的载波的一种过程。
存在两种恢复方法,第一,载波信号与数字信号同时传输给终端,在终端应用窄带滤波器调取载波信号;第二,终端接收的信号属于抑制载波的信号,此时采用非线性变换的方式调取相关载波[1]。
2 数字通信系统中的载波恢复技术探析2.1 载波恢复思想系统发送信号的一端与接收信号的一端存在差异,加上信号序列在传输期间会出现损坏,表现为相位抖动。
同时射频振荡器还存在频率不稳定因素,因此有必要对其进行补偿,避免其抖动。
基本原理。
载波恢复所收到的信号一般已经经由下变频、均衡等作用,此时的信号存在频偏、相偏等问题。
载波恢复的思想是在包括噪声或者多径的情况下,获得频偏,同时跟踪相偏。
最终在系统联合作用下准确恢复信号。
基本框图。
通常情况下,盲均衡处理后才会进行载波恢复,此时的信号仍存在多径问题,载波恢复便在多径环境下运行,通常采用盲载波恢复技术中的锁相环相位方法予以实现,它可以跟踪信号相位波动情况。
QAM接收机中码定时恢复电路的算法、结构和实现

苤三童定吐筮复电路援途
第二章定时恢复电路概论
2.1介绍
定时恢复的目的是通过过采样方法从调制波形中恢复出符号率或几倍符号率的时钟。
这个时钟一般用于接收机前端的模数转换器(ADC),将接收到的连续信号转换为离散符号序列。
这个过程就叫做符号同步或者定时恢复。
通常对各种定时恢复方法的分析比较很困难,一般有两个性能标准:
(1)定时相位(TimingPhase)
接收机不仅耍知道对输入信号的采样频率,还要知道每个频率间隔内的采样位置。
采样位置的选取就是“定时相位”。
接收机性能对定时相位的依赖程度可从图2.1看出。
在带限信道的同步通信系统中,采样点偏离最优采样位置越远,符号间串扰(ISI)就越大,此时定时相位就比较重要。
图2.164QAM同相信号的眼图
(2)定时抖动(TimingJitter)
从数据信号恢复的时钟总会有定时抖动。
这个抖动可以通过定时恢复电路的设计或者附加的锁相环(PLL)来缩减到预期目标。
定时抖动引入两方面衰减:首先,在次最优点采样会增加码间串扰(参看图2.I)。
其次探测器产生的比特流通常带有和定时恢复电路产生的同样的定时抖动。
通常数据接收端可以容忍一定的抖动,但在对语音这样的信号进行脉码调制(PcM)数字传输时,抖动
QAM接收机中码定时恢复电路的算法、结构和实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
· 58 ·
哈 尔 滨 工 程 大 学 学 报 第 23 卷
假定定时恢复完 全正确且采样 点无码间串 扰 , 则第 k 个采样值为
r(k)= akejθ+n(k). 若 ak =Akejφk , 其中 Ak , φk 分别为码字的幅度和 相位 .则 r(k)的相角为 φk +θk +nθ(k), 其中 nθ (k )是噪声 n(k )对相位的干扰 , 称为相位噪声 . 可见 , θk 中包含了全部的载波相位信息 , φk 包含 了大量甚至全部的码字信息 .因此可以对线性相 位 φk +θk +nθ(k )进行处理 , 以提取载波和恢复 码字 , 这是本算法的基本出发点 .
对于 MPSK 信号而言
φk
=i
2π M
+Mπ
,
i
=0 ,1 ,
…, M
-1 ,
因此
Δφk
= j 2Mπ, j
=-M2
+1 ,
…,0 ,
…,
M 2
.
特别是对于差分编码的移相键控信号 DC -
MPSK , Δφk 和发端差分编码 前的码字一一对应 , 即一旦 Δφk 确定 , 就能得出差分译码后的码字 , 这就是 DC -MPSK 信号的差分相干解调 .
i =k-N+1
k
∑ Ψk +1
(Ψk +1 - Ψi)2
i =k-N+1
=0
得
k
∑ Ψ
=
1 N
i
=k-N
+1
Ψi .
(6)
即 Ψ等于观测区间内的观测值的统计平均值 .
根据式(4), 有
Ψi =mod(Ψ+nθ(i)).
容易证明 , nθ(i)均值为 0 .因此当 Ψ≠0 时 , 由于
mod(·)运算将使 Ψi 的均值不是 Ψ, 因此由式(6)
· 60 ·
哈 尔 滨 工 程 大 学 学 报 第 23 卷
得到的估计 Ψk+1并不是无偏的 , 对 Ψi 稍作变化 , 可以使 Ψk +1近似为无偏估计 .若在 i -1 时刻已 经估计出 Ψi -1 , 重新构造
Ψi +2π, Ψi < Ψi -1 -π,
第 5 期 袁清升 , 等 :全数字接收机中的载波恢复算法研究
· 59 ·
存在模糊度 , 鉴相特性的线性范围 将减小 .例如
QPSK
有
4
种相位
模糊度
,
其线性
范围为
-
π 4
~
π4 ), 鉴相特性越好锁相环的性能也越好 .
2 .2 载波频率估计
理想二阶跟踪环和传统的二阶锁相环一样 ,
1 相位处理载波恢复算法的提出
在传统的载波恢复法中 , 无论是锁相环路跟 踪法 , 还是载波相位估计法 , 都是直接对接收信号 r(t)在直角坐标平面上进行处理 .实际上在 r(t ) 为非 AM 信号时 , r(t )的相角包含了全部的码字 信息和载波相位信息 .基于这种考虑 , 笔者提出了 对 r(t)的相角进行处理的载波恢复和解调方案 , 称之为相位处理载波恢复法 .
如果在收端对 Δφk 做出了判定 Δφ, 并假定 判决无误 , 由式(3)可得到载波 频率差 Ψ的第 k
个观测值 :
Ψk =mod(V(k)-Δφk)=
mod(Ψ+n θ(k)).
(4)
采用某种估计算法 , 由载波频率的观测序列{Ψk} 可预测得到第 k +1 个估计值 Ψk +1 , 后面给出了 两种估计算法 .如果已经求得到了第 k 个 Ψ的观
全数字接收机中的载波恢复算法研究
袁清升 , 陈 慧 , 徐定杰 , 袁赣南
(哈尔滨工程大学 自动化学院 , 黑龙江 哈尔滨 150001)
摘 要 :针对数字信号传输同步接收机 的数字化实现 , 提出了一种载波同步新 算法即相位 处理载波 恢复法 .它 直接对接收信号的相角进行处理 , 完成载 波频率的快速捕获和 载波相位的 跟踪 .理论分 析和计 算机仿 真表明 , 该算法简单有效 , 运算量小 , 便于用 DSP 器件来实现 , 适用性强 . 关键词 :载波恢复 ;载波同步 ;数字信号处理 中图分类号 :TN965 .5 文献标识码 :A 文章编号 :1006-7043(2002)05-0057-05
Algorithm for Carrier Recovery of All Digital Receiver
YUAN Qing_sheng , CHEN Hui , Xu Ding_jie , YUAN Gan_nan
(College of Automation , Harbin Engineering University , Harbin 150001 , China)
p(k)=mod(φk +θk +nθ(k));
第 k +1 个相位输入为 p(k +1)=mod(φk+1 +θk+1 +nθ(k +1)).
两式相减 , 得
V(k)=mod(p(k +1)-p(k))=
mod(Δφk + Ψ+nθ(k)), (3)
其中
Δφk =mod(φk+1 - φk),
nθ(k)=mod(nθ(k +1)-nθ(k )),
mk =mod(p(k)-θk),
fk(θe)=mod(mk -φk)=mod(θe +nθ(k)).
其中 θe =θk -θk 为相位误差 .
图 2 鉴相特性 Fig .2 The phase discrimination characteristic
如果不考虑噪声的影响 , 其鉴频特性具有最 大的线性范围如图 2 所示(实际上 , 由于判决 φk
Ψ′i = Ψi -2π, Ψi > Ψi -1 +π, (7)
Ψi , 其他 .
若 Ψi -1 =Ψ, 则 Ψ′i =Ψ+nθ(i).由此得出改造后
的估计算法为
∑ Ψk +1
=
1 N
i
=k
k -N
+1
Ψ′i .
(8)
并且可以认为估计 Ψk +1是无偏的 .
由式(6)或式(8)可以看出 , 统计平均法载波
所示 .
图 1 理想二阶跟踪环原理图 Fig .1 The block diagram of ideal 2nd order and tracking loops
在相 位 处理 中 , VCO 是 一个 简 单的 累 加 器 , 即
θk +1 =θk +Ψk , 表示估计值 .
在传统的理想二阶锁相环中 , 环路滤波器采
测值 Ψk , 并假定估计无误 , 则有 W(k)=mod(V(k)-Δφk)=
m od(Ψ+n θ(k)).
(5)
由 W(k)可以判决出 Δφk . 根据式(3), (4)和(5), 可得到如图 3 所示的
载波频率估计算法结构 .
图 3 载波频率估计算法结构图 Fig .3 The block diagram of estimation algorithm for carrier frequency
第 23 卷第 5 期 哈 尔 滨 工 程 大 学 学 报 Vol.23, № .5 2002 年 10 月 Journal of Harbin Engineering University Oct., 2002
2 算法的公式推导
接收信号 r(k)的相角为 φk +θk +nθ(k ), 对 于高斯 白噪 声信 道 , 可以 证明 , 相 位噪 声 nθ(k) (取值范围为(-π, +π))的均值为 0 , 且当 i ≠j 时 , nθ(i)和 nθ(j)相互独立 .
若收 、发端载波存在频率差 Δω, 一般情况下
频率估计的频率捕获时间就是 NT .
2)Kalman 滤波法 采用 Kalman 一阶预测算法 , 由线性最小均方
下面给出 r(t)的相角表达式 .经过正交解调 及低通滤波后的接收信号为
+∞
∑ r(t)= ang(t -nT)ejθ+n(t ). -∞
式中 :an为随机发送的数据 , g (t)为信道的脉冲 响应 , θ为本地载波和发端载波的相位差 , n(t)为 高斯随机噪声 .
收稿日期 :2001 -11 -12 ;修订日期 :2002 -09 -03.
在扩频体制的全数字无线电导航接收机中 , 一方面需要利用扩频码的同步解调来进行测距定 位 , 另一方面为了提高精度也需要对载波进行相 位的测量 , 以实现伪码相位和载波相位联合测距 定位 , 这就需要对载波准确快速恢复 , 因为定位的 精度和实时性取决于载波相位测量的精度和实时 性 .在全数字接收机中参考载波和采样时钟都有 独立的固定振荡器产生 , 不需要反馈控制 , 而传统 的相干解调的所有其它功能 , 如载波相位的调整 , 定时误差的校正等 , 都由后面的数字信号处理部 分完成 .这样就对载波恢复算法的精度和速度都 提出了较高的要求 .要做到精确快速的恢复载波 , 就需要对载波恢复作精心的设计 .本文对此作了 一些探讨 , 提出了简化的 Kalman 滤波算法 , 建立 了数学模型 , 给出了仿真结果 , 表明该算法是简单 有效的 .
Abstract :A new carrier synchronization algorithm , that is carrier recovery strategy , is proposed for all digital receivers that is all digital implementation of receivers for synchronous digital data transmission .It directly processes the phase of the received signal and realize fast capture of the carrier f requency and keep the carrier phase .Analysis and computer simulation show that this algorithm is simple , efficient and very suitable to DSP implementation . Key words:carrier recovery ;carrier synchronization ;digital signal processing