气动上下料机械手手部结构的设计与分析
基于PLC的气动机械手手部结构设计优化方案

图 3 机 械 手 手 部 结构 图 1 手 爪 ; 手 指 ; 齿 条 ; 一 扇 形 齿 轮 ;一 销 ; 一 螺 钉 ; 一 2 3 4 5 6 7 螺 母 ; 外 罩 ;一 气缸 一 8 9
基 于 P C的气 动 机 械 手 手 部 结 构 设 计 优 化 方 案 L
谌 渭
~』~ 匡鬣 ~捡 .溉 一 留 控~ 制 柜一 气电 动机 统| 一l =. }磁 l示 =态 匡 {一 j 盯~ 一一 ~ 制 面 扳 一 _ 眄 二 一
工
( 江 大 学机 械 工 程 学 院 长
整 个 系 统 分 为 控 制 系 统 、 动 系 统 和 执 行 系 统 三 大 部 分 , 统 驱 系 组成如图 1 示 . 所
图 1 系 统 组 成 框 图 2 机 械 手 手 部 结 构 设 计 分 析
21 机 械 手 概 述 .
( ) 标 形 式 所 设 计 的 机 械 手 具 有 两 个 自 由度 , 擦 轮 具 有 一 1坐 摩 个 自 由度 , 采 用 直 角 坐 标 形 式 。 如 图 2 示 , 械 手 的 两 个 自 由 故 所 机 度 分 别 是 手 臂 的 水 平 移 动 和 手 臂 的 伸 缩 运 动 , 沿 X 方 向 的 移 即 轴
1 系 统 组 成
一 轮 I 动I专 .出一 械 一 手=嘣 . 伸二伸= 移l诤 一 一 缩二缩 I j 眩一 手 擦= 槭= 一 i
图 2 机 螺 纹 与 齿 条 联 接 , 爪 通 过 螺 钉 与 扇 形 齿 轮 联 手 接 , 形 齿 轮通 过 圆 柱 销 与 外 罩 联 接 , 通 过 活 塞 杆 的 往 复 运 动 实 扇 即 现 了 手 爪 的 张 开 与 闭 合 . 于销 与 扇 形 齿 轮 的 联 接 属 于 间 隙 配 合 , 由 所以它们之间存在剪切危 险, 过校核 , 剪切应力满足要求 。 经 其
上下料机械手柔性手腕的设计及位置误差分析

21 0 2年 2月
江 南 大 学 学 报 ( 然 科 学 版) 自 J u n l f in n n U ie s y Nau a S in eE i o ) o r a a g a n v ri ( t r l ce c dt n oJ t i
一
个柔顺 环节 , 用来 满 足柔顺 装配 的需要 。
手腕是 连接 手臂 与手 部 的部 分 , 的作 用 是 在 它
手 臂运 动 的基 础 上进 一 步 改 变 或 调 整 手 部 在 空 间 的方位 ( 姿态 和位 置 ) 以使 手部 能实 现 预定 要 求 的 , 复杂 动作 J 国 内外 比较 常见 的柔 性 手腕 机 构有 平 。
( col f e hncl nier gj nn nU iesy Wui 112 Jagu S ho o ca i gnei ,a g a nvri , x 24 2 ,in s) M aE n i t
Ab t a t Us a l ti i iu t t s e l h r p e e w e e d n n n o d n e a s f t e a l k n s o s r c : u l i s d f c l o a s mb e t e wo k i c h n f e i g a d u l a i g b c u e o h l i d f y e r r .I r e o s l e t i p o lm. I h s p p r e me h n c l f x b e w itf r C r d n c i e i ro s n o d r t o v h s r b e n t i a e ,a n w c a ia e i l rs o NC g i i g ma h n s l n p o o e .T e sr cu a o c p n e t r f t e wr t a e i to u e . Th o i o i g e r r r d cn y t e r p s d h tu t r l c n e t a d f a u e o h i r n r d c d s e p st n n ro s p o u i g b h i wo k ic u i gt e w r r c s f t e ma i u ao r n l z d T e r s ls p o i e h a i o h tu t r l r p e e d rn h o k p o e s o h n p l t ra e a ay e . h e u t r vd s t e b ss f rt e sr c u a d sg i g a d o t z t n o h it e in n n p i ai ft e wrs. mi o
机械手-气动机械手设计(含CAD图纸)
第一章概述1、引言随着气动技术获得了快速发展,利用成本性能比低,同时具有许多优点的气动机械手设备来满足社会生产实践需要越来越多的受到重视。
气动机械手与其他控制方式的机械手相比,具有价格低廉、结构简单,功率体积比高、无污染及抗干扰性能强等特点。
1、2机械手的应用与发展机械手臂在产业自动化的应用已经相当广泛,因为各个国家产业分布的不同,以及各产业对于机械手臂的需求量也有差异。
主要是使用于人工无法进行或者会耗费较多时间来做的工作,机械手臂在精度与耐用性上可以减少许人为的不可预知问题。
自从第一台产业用机器人发明以来,机械手臂的应用也从原本的汽车工业、模具制造、电子制程等相关产业,更拓展到农业、医疗、服务业…等等。
多轴机械手臂研发方面,多轴式机械手臂广泛应用于汽车制造商、汽车零组件与电子相关产业。
机械手臂可以提升产品技术与品质,而这些初期工作大多可以借由机械手臂来完成。
机械手臂的精准、零误差,对于产品的品质掌握自然拥有其优势,减少品管所花费的时间与人力。
工业应用上,以装配、加工、熔接、切削、加压、货物搬运、检测…等,全球目前产业使用量是以汽车、汽车零组件、化工、橡胶和塑料等最大。
现在,ROBOT的应用已越来越多元化,依据国际机器人协会(IFR)的统计,至2007年底机械手臂除了工业以外,最多应用于救援、保全与野地(田野、牧场等),近年来,各先进国家为了提升台机器人的技术水平,都会推广机器人产业与创立相关联盟,并且特别针对工业以外的领域进行推广,例如:医疗、服务、生活方面…等。
以医疗为例,有许多大型医学中心使用以手动操控方式之机械手臂,结合显微影像显示系统所结合的手术型机器人。
机械手臂的研发也朝向节省人力、减少人类暴露在危险的工作环境、甚至进行更加精密的工作或是辅助操作。
机械手臂的技术发展都是为了让人类在工作与生活中更加便利。
1、3气动机械手概述气动机械手由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作,自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化设备。
上下料机械手结构设计
上下料机械手结构设计
上下料机械手是工业自动化领域中常见的设备,用于在生产线
上进行物料的搬运和装配。
其结构设计需要考虑以下几个方面:
1. 机械手类型,根据实际需求,可以选择不同类型的机械手,
比如直线运动机械手、旋转机械手、SCARA机械手等。
每种类型的
机械手都有其适用的场景和特点,需要根据具体的作业需求来选择。
2. 关节结构,机械手通常由多个关节组成,关节的结构设计需
要考虑到负载能力、精度要求、速度要求等因素。
常见的关节结构
包括直线传动、齿轮传动、伺服电机驱动等,需要根据具体情况选
择最合适的结构。
3. 末端执行器,末端执行器是机械手的关键部件,用于实际的
物料抓取、放置和装配。
末端执行器的设计需要考虑到抓取力度、
抓取形状、灵活性等因素,常见的末端执行器包括气动夹爪、机械
夹具、吸盘等。
4. 控制系统,机械手的结构设计需要与控制系统相匹配,确保
机械手能够按照预定的路径和速度进行运动。
控制系统通常包括传
感器、编码器、控制器等部件,需要与机械手的结构设计相协调。
5. 安全性考虑,在机械手的结构设计中,需要考虑到安全性因素,确保机械手在运行过程中不会对操作人员或周围环境造成伤害。
这包括安全防护装置的设置、紧急停止系统的设计等。
综上所述,上下料机械手的结构设计需要综合考虑机械手类型、关节结构、末端执行器、控制系统和安全性等多个方面的因素,以
确保机械手在实际生产中能够高效、安全地完成物料的搬运和装配
任务。
自动上下料机械手设计
自动上下料机械手的设计摘要随着机电一体化技术和计算机技术的应用,机械手的研究和开发水平获得了迅猛的发展并涉及到人类社会生产及生活的各个领域,特别是工业机械手在生产加工中的应用。
机械手是近代自动控制领域中出现的一种新型技术装备,它能模仿人体上肢某些动作,在生产中代替人搬运物体或操持工具进行动作,已成为现代机械制造系统中的一个重要组成部分。
本次设计主要设计自动上下料的机械手,该系统采用液压驱动,传动平稳,且易于控制,控制系统采用一般PLC所具有的位移寄存器和位移指令来编程。
关键词:机械手,液压驱动,控制系统目录1绪论 (1)2 工业机械手的设计方案 (2)2.1 工业机械手的组成 (2)2.2 上下料机械手的工作原理 (3)2.3 规格参数的选择 (3)2.4 设计路线与方案 (4)2.4.1 机械手的总体设计方案 (4)2.4.2 设计步骤 (4)2.4.3 研究方法和措施 (4)3 机械手各部分的计算与分析 (5)3.1 手部计算与分析 (5)3.1.1 滑槽杠杆式手部设计的基本要求 (5)3.1.2 手部的计算和分析 (5)3.2 腕部计算与分析 (12)3.2.1 腕部设计的基本要求 (12)3.2.2 腕部回转力矩的计算 (13)3.2.3 腕部摆动油缸设计 (16)3.2.4 选键并校核强度 (18)3.3 臂部计算与分析 (18)3.3.1 臂部设计的基本要求 (18)3.3.2 手臂的设计计算 (20)3.4 机身计算与分析 (28)4 液压系统设计 (29)4.1 液压系统总体设计 (29)4.2 液压元件的选择 (29)4.2.1 液压缸 (29)4.2.2 液压泵的选取要求及其具体选取 (31)4.2.3 选择液压控制阀的原则 (33)4.2.4 选择液压辅助元件的要求 (33)5 液压元件的保养与维修 (37)5.1 液压元件的安装 (37)5.2 液压系统的一般使用与维护 (37)5.3 一般技术安全事项 (37)6 结论 (39)参考文献 (40)致谢 (41)附录 (42)1绪论工业机械手是人类创造的一种机器,更是人类创造的一项伟大奇迹,其研究、开发和设计是从二十世纪中叶开始的。
自动上下料机械手手部结构的设计
【 i 1陈长民,李丽霞 《 国际经济学》 【 M 1中国人 民大学出版社 2 0 0 4 [ 2 】 范科 才 ,周 黎 瑶 中 国 巨额 外 汇储 备 的成 因 、影 响及应 对 策 略 … 大 众商 务 2 0 1 0( O 6】 [ 3 ] 黄 莹 试论 当前 我 国外 汇储 备 存 在 的 问题及 其 对 策 【 J ] 现代 商 业
综上所述,外汇储备是平衡 国际收支的项 目,其增长是运行宏观 经济的成 果,反映出的是汇率政策与外汇管理政策 。外汇储备保持充 足有助 于国际偿还能力的增强,有助于对金融风险的防范 ,维护经济 安全 但这并不代表储备越 多的外汇就越好,外汇储备只有协调好内 外经济平衡才是合理 的,这也是储备外汇追求的 目标 。
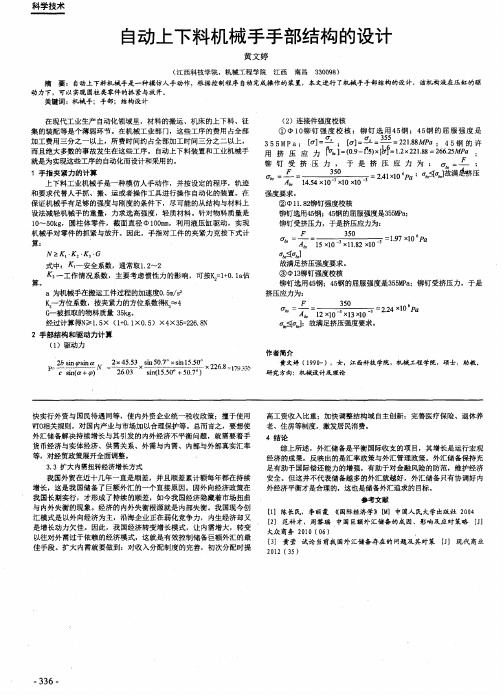
动 力下 ,可 以 实现 圆柱 类零 件的 抓 肾与放 开 。 关键 词 :机械 手 ;手部 ;结构 设计
在现代工业生产 自动化领域里,材料 的搬运 、机床 的上下料、征 集的装配等是个薄弱环节 。在机械工业部 门,这些 工序 的费用 占全部 加工费用三分之一以上 ,所 费时间约 占全部加工时间三分之二 以上, 而且绝大多数的事故发生在这些工序 。自动上下料装置和工业机械手 就是为实现这些工序的 自动化而设计和采用的。
强度要求 。 ② 中1 1 . 8 2 铆钉强度校核 铆钉选用4 5 钢;4 5 钢的屈服强度是3 5 5 I  ̄a ;
铆钉 受 挤 压 力 ,于 是挤 压 应 力 为:
1 5 x l O— xl 1 . 8 2 x l O一 =1 . 9 7 x l O Pa
J
2 0 1 2( 3 5)
科学技术
自动上 下料机械手手部结构 的设计
黄文婷
( 江 西 科技 学 院 ,机 械 工程 学院 江西 南昌手是 一 种模 仿人 手 动作 ,根 据控 制 程序 自动 完成 操 作 的装 置 ,本 文 进行 了机 械 手手部 结 构 的设计 ,该 机 构液 在压 缸 的驱
数控机床机械手上下料设计

数控机床机械手上下料设计1. 机械手的选型:机械手的选型要根据机床的工作环境、工件尺寸和重量等因素进行选择。
常见的机械手类型有SCARA机械手、直角坐标机械手和Delta机械手等。
机械手的选型要保证其具备足够的精度、承载能力和速度。
2.机械手的运动轨迹规划:机械手上下料的运动轨迹规划要尽量减少运动时间,提高生产效率。
一般采用直线插补或者圆弧插补的方式进行轨迹规划。
同时,还要考虑到机械手的运动平稳性,避免产生过大的加速度和振动。
3.机械手的夹具设计:机械手的夹具设计要根据工件的形状和尺寸进行设计,以保证夹持力和夹持稳定性。
夹具还需要具备自动卡紧和松开的功能,以便于机械手的操作。
4.机械手的控制系统:机械手的控制系统要能够准确控制机械手的运动和夹具的开合,实现精确的上下料操作。
控制系统还需要具备灵活的编程能力,以适应不同工件的加工要求。
5.安全措施的设计:机械手上下料过程中需要考虑到操作人员的安全。
可以设置机械手的安全围栏和光幕等安全装置,防止人机碰撞事故的发生。
在数控机床机械手上下料设计中,还需要进行一系列的试验和验证。
首先进行机械手的空载试运行,测试其准确性和稳定性。
然后进行机械手的负载试运行,测试其夹持力和承载能力。
最后进行机械手与数控机床的协调操作试验,验证机械手是否能够准确地完成上下料操作。
总的来说,数控机床机械手上下料设计需要考虑机械手的选型、运动轨迹规划、夹具设计、控制系统和安全措施等方面。
通过合理的设计和验证,可以实现机械手上下料的自动化操作,提高生产效率和产品质量。
气动四自由度机械手结构设计正文

摘要针对数控车床设计的一种套类零件自动上下料机构,实现了坯料的抓取、自动定位、夹紧以及工件的回放。
该机构主要由自动安装夹具,坯料、工件拾取机械手,动力及控制系统组成。
零件的自动定位、夹紧由弹簧涨胎心轴实现,涨胎心轴是以工件的内孔表面定位,由气缸驱动弹性筒夹向外扩涨,实现工件的定位和夹紧的。
坯料、工件的拾取、回放是由单臂形式的机械手通过伸缩、旋转以及俯仰等运动实现的,这些运动均由气缸驱动获得。
本设计中,为实现工件的自动上下料,单臂机械手的运动与涨胎心轴的张合需进行紧密配合。
考虑到所夹持工件的实际尺寸、质量等因素,本机构采用气动夹具、电气控制实现了坯料和工件的拾取、安装、回放过程的自动完成。
本文对气动机械手进行总体方案设计,确定了机械手的坐标形式和自由度。
同时,设计了机械手的夹持式手部结构。
关键词:自动上下料;气动机械手;气动夹具;套类零件IAbstractThi s paper is aim ed at desi gn i ng a sl eeve part s aut om ati c bai ti ng a genci es for a C NC l athe.It s func t ion is process i ng the crawls, aut om ati c pos it ioning and cl amping of t he workpi ece.The aut om at i c bait i ng agenci es m ainl y con si st of t he autom at i c fixt ure, the m ani pul at o r for pi ck ing up t he workpi ece and bi ll et s and t he dri ve and cont rol s ys t em.Am ong t hem,the aut om at i c pos it i oni ng and cl am p ing of t he s ets part s i s achi eve d b y t he axi s fet al heart rat e ris ing t o t he workpi ece cent eri ng hol e.W hen cl am pi ng t he workpi ece,fl ex ibl e tube fol der can cent er and cl am p t he c yli ndri cal hol e through t he expansi on and i n fl a ti on;bl ank gras p ing of t he workpi ece and the i nt ervals are achi eve d b y t he m anipul at or arm b y st ret chi ng and rot at ing.In t h e i ssue,i t i s neces s ar y for t he movem ent s of t he m anipul at or arm and the autom at i cal fixt ure Zhang t o requi re t he coordi nat i on.Taki ng int o account that t he actual workpi ece siz e,t he quali t y and t he vari ous feat ures of t he dri ven approach t o the s yst em,we deci de to adopt t he aerod ynam i c cont rol,us i ng com pressed ai r t o achi eve t he movem ent s of t he cl am pi ng fixt ure and m ani pul at or.Keyw ord s:Aut om at i c b ait i ng;P neum ati c m ani pul at or;P neum ati c fixt ure;sl eeve part sII目录摘要............................................................ 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文章编号:1003-1251(2006)06-0058-03
气动上下料机械手手部结构的设计与分析
赵 碧,巴 鹏,徐英凤
(沈阳理工大学机械工程学院,辽宁沈阳110168)
摘 要:以炮弹径长自动检测生产线上搬运炮弹机械手的手部结构为研究对象,采用单片机对其气压驱动装置进行顺序控制,为保证结构设计的合理性,在论述系统组成、机
械手运动、坐标形式及运动范围的基础上,运用有限元分析方法对手部结构进行分析和优化改进,结构设计满足验算结果要求.
关键词:机械手;手部结构;结构设计;有限元分析中图分类号:TP241.2 文献标识码:A
收稿日期:2006-04-03
作者简介:赵碧(1981—),女,辽宁沈阳人,硕士研究生1
在炮弹径长自动检测生产线上,要检测不同
长度炮弹的外径值是否都在规定的尺寸公差内,该工作过程受检测进程的限制,工人劳动强度大,且不易确保炮弹在检测平台上的位置.为了解决上述问题,本文设计一套采用单片机控制的带有摩擦轮压紧装置的气动上下料机械手.机械手手部结构的设计将影响炮弹的表面质量及其在检测平台上的位置,进而影响检测结果,因此运用有限元分析方法对所设计的结构进行应力分析、位移分析,并对结构进行优化设计.
1 系统组成
整个系统分为控制系统、驱动系统和执行系统三大部分
[1]
,系统组成如图1所示
.
图1 系统组成框图
1.1 控制系统
控制系统包括主控制柜、控制面板(状态显
示、按钮)和位置检测装置[2]
.位置检测装置主要由行程开关组成,用来检测机械手的工作是否到位,并把相关信号传递给控制中心以便进行下一步的动作.在整个过程中,主要控制:(1)气动系统电磁阀的得电、失电;(2)步进电机、交流电机的启动、停止;(3)键盘显示、指示灯.1.2 驱动系统
整个系统需处于洁净的环境中,以确保检测
的准确可靠,因此采用气压驱动[3]
,即保证了环境的清洁,又满足了机械手运动快速性的要求.1.3 执行系统
执行系统分为上下料系统和检测系统两部分.上下料系统包括机械手手爪的夹紧与张开、摩擦轮和机械手手臂的上升与下降、机械手手臂的移动;检测系统包括炮弹旋转、测头移动和顶炮弹用活塞杆的伸出和收回.
2 机械手手部结构设计与分析
2.1 机械手概述
1)坐标形式所设计的机械手具有两个自由
2006年12月
沈阳理工大学学报 Vol.
25No .6第25卷第6期
TRANS ACTI O NS OF
SHENY ANG L I G ONG UN I V ERSI TY
Dec .
2
6
度[4]
,摩擦轮具有一个自由度,故采用直角坐标形式.如图2所示,机械手的两个自由度分别是手臂的水平移动和手臂的伸缩运动,即沿x 轴方向的移动和沿z 轴的伸缩;摩擦轮的自由度即沿z 轴的伸缩运动.
2)工作过程对于上下料机械手,其工作是在最短的时间内抓取、抬升、移动、放炮弹至检测平台,经检测后,再迅速地抓取、抬升、移动、放炮弹至存放处,然后回到原位,执行下一次操作.
3)工作范围机械手手臂在水平方向移动的总行程为600mm ,在垂直方向的伸缩行程为125mm ,由于在手臂伸出时,摩擦轮与工件的距离为35mm ,所以摩擦轮的伸缩行程为
160mm.
图2 机械手的坐标形式
2.2 机械手手部结构设计
机械手的手部
[5]
是机械手上承担抓取工件的
机构,由于被抓取物件(炮弹)的形状近似于圆台,所以,其手爪采用特殊的V 字型结构,即手爪的内表面设计成与圆台斜度相同的斜面,即保证了抓取的稳定又不会因“线接触”而影响炮弹的表面质量.机械手手部的驱动装置采用齿轮齿条杠杆式结构,因为其结构简单,传动可靠,特别是采用无关节的手指形式,使抓取误差更小,定心精度更高.具体结构见图3,其中,机械手外罩通过螺母紧固在气缸缸体上,活塞杆利用自身的螺纹与齿条联接,手爪通过螺钉与扇形齿轮联接,扇形齿轮通过圆柱销与外罩联接,即通过活塞杆的往复运动实现了手爪的张开与闭合.由于销与扇形齿轮的联接属于间隙配合,所以它们之间存在剪切危险,经过校核,其剪切应力满足要求.2.3 机械手手部结构分析
为了加工方便、使手指的通用性更强,采用对称式钳爪手部结构,
为保证抓取的可靠性和结构
图3 机械手手部结构图
1———手爪;2———手指;3———齿条;4———扇形齿轮;5———
销;6———螺钉;7———螺母;8———外罩;9———气缸
设计的合理性,采用ANSYS 大型有限元分析软件,对机械手的变形和应力情况进行仿真分析.
2.3.1 有限元模型
建立机械手有限元模型的关键在于受力结构的简化及等效边界条件的确定.由于机械手采用对称结构,所以,把有限元模型简化为对一半手部结构进行分析.机械手有限元模型如图4所示
.
图4 机械手有限元模型
(1)确定手指的支持力和齿轮啮合处的作用
力:假设手指所受水平方向上的夹紧力为零,即炮弹的自重完全由手爪的下表面来克服,通过受力
分析确定手指的支持力;由于齿轮齿条之间相互啮合,必然存在相互作用,且活塞杆与齿条相联,所以,根据活塞杆的推力即可得出齿轮的受力情况.
(2)确定等效边界条件:由于机械手的张开和闭合是通过扇形齿轮与齿条之间的啮合实现,其回转中心即为销轴处,所以,应在销轴的位置增加约束.2.3.2 有限元分析
机械手以钢为材料,其密度ρ=7800kg/c m 3
,弹性模量E =202GPa;按分析的条件增加约束,对
・
95・第6期 赵 碧等:气动上下料机械手手部结构的设计与分析
受力部位进行加载.有限元分析后,应力分析结果如图5所示,在炮弹自重和齿轮的作用力下,机械手手部的最大应力出现在齿轮与齿条相啮合部位
的齿根部,其最大应力为0.475×107
Pa,满足许用应力要求,最大应力出现位置的放大视图如图6所示;有限元分析后,位移分析结果如图7所示,可见,在炮弹自重作用下,机械手手部的最大位移出现在手爪的末端,即图7最左边,其大小为0.85
×10-6
m ,满足许用位移要求
.
图
5 应力云图
图
6 应力集中放大视图
图7 位移云图2.4 机械手手部结构优化
通过对机械手有限元分析结果的研究,虽然
其产生的最大应力、最大位移均满足许用要求,但从结构优化的角度考虑应进行如下优化:
(1)由于最大应力出现在齿轮的齿根处,所以,为了减小应力给齿轮寿命带来的影响,应采用热处理方法增强齿根强度.
(2)由于最大变形出现在手爪受压的地方,长期使用定会加剧磨损,从而间接影响炮弹在检测平台上的位置.因此,对于下半部分手爪结构进行热处理,以增强其耐磨性和强度.
3 结束语
通过采用机械手代替人进行重复的取放工
作,不仅可减轻工人的劳动强度,也提高了劳动生产率;通过对机械手手部结构进行有限元分析,肯定了结构设计方针的正确性,为结构的优化改进提供了依据.所设计的机械手手部结构不但满足在夹紧力为零情况下的夹紧要求,而且可以有效抑制因重复夹取工件而使手指产生的磨损.
参考文献:
[1]朱春波,王大明,李哲,等.P LC 控制的气动上下料机械手
[J ].液压气动与密封,1999,78(6):21223.
[2]曹素芬.单片微型计算机原理与接口技术[M ].沈阳:东北
大学出版社,1994.
[3]左健民.液压与气压传动[M ].北京:机械工业出版社,
1999.
[4]张波,李卫民,尚锐.多功能上下料用机械手液压系统[J ].
液压与气动,2002,(8):31232.
[5]王承义.机械手及其应用[M ].北京:机械工业出版社,
1981.
D esi gn And Ana lysis of the F i n er ’s Structure of Pneuma ti c M an i pul a tor
ZHAO B i,BA Peng,Xu Ying 2feng
(Shengyang L igong Universty,Shenyang 110168,China )
Abstract:The structure of the mani pulat or’s finger f or carrying the shells at the aut omated p r oducti on line by measuring the shell’s dia meter is studied .The pneu matic driving devices are contr olled sequentially by single chi p m icr ocomputer .I n order t o guarantee the ratr onality of the structure design,FE M is used t o analyse and op ti m ize the finger’s structure .The structure design meets the require ment of the verificati on result .
Key words:mani pulat or;finger’s structure;structure design;finite ele ment method (FE M )
・
06・沈阳理工大学学报 2006年。