双余度电动作动器电气设计与实验
双余度机电作动器系统的研究
双余度机电作动器系统的研究近年来,双余度机电作动器系统已经受到了越来越多的关注,是涉及多学科领域的研究热点。
一、双余度机电作用器系统的概念双余度的机电作动器系统(也称双摩尔机电作动器系统)是一种具有两个电动机或电动马达的机电作动器系统,即可实现控制机构运动的参数(位置,速度或加速度)。
它具有放疗灵活性高、可控性强、噪声小、高精度控制等优点,广泛应用于导航、卫星制导、机器人及航空航天装备等领域。
二、双余度机电作用器系统的设计和分析1. 设计:(1)电机选型:根据功率要求、加速度要求和特点,选择正确的电机类型;(2)伺服系统设计:根据电机特性、控制要求等,设计机构和控制系统;(3)结构设计:根据有限元分析结果,确定所需尺寸及材料,设计合理的机构结构以满足要求。
2. 分析:(1)数学建模:建立服务过程的数学模型,包括机构动力学建模和电机建模;(2)有限元分析:根据机构结构,对设计进行有限元分析;(3)系统仿真:根据建立的模型,进行系统模拟仿真,全面评估系统功能。
三、双余度机电作用器系统的进展双余度机电作动器系统的研究技术近年来取得了长足的进展。
目前,研究者可以从各个维度精确优化双余度机构的性能和可靠性。
同时,针对不同的系统需求,发展出多种形式的配置实现了更加多元的设计。
此外,人们也把研究的重点转移到了系统智能化的方面,以及应用在室内定位、自主交通等具有挑战性的领域。
不断推动双余度机电作用器系统技术的进展,对于丰富多样的控制环境以及实现较高精度控制具有重要意义。
届时,双余度机电作动器系统将更加完善,可以更好地满足特定系统的需求,拓展应用范围。
804 双余度电动作动器电气设计与实验
actuator;synchronous reluctance with permanent
magnet motor;dynamic response
作动器是运动控制装置进行机动动作的传动机 构,它的发展经历了早期的机械传动到后来的液压 传动,到最近发展起来的全电传动这个过程。液压伺 服系统占系统重量比较大,不利于系统集成,并且降 低了可靠性。随着全电化传动系统概念的提出,电动 作动器成为目前伺服传动系统研究的热点。国内外 最近开始这方面的研究,目前采用的主要是无刷直 流电机和永磁同步电机驱动下的小功率电动作 动器E1吲。
关键词:电气传动}余度,电动作动器,同步磁阻永磁电 机;动态响应
中图分类号:TM 921.4 文章编号:1000—0054(2008)01—0005—04
文献标识码:A
Design and experiment of double redundancy electrical—mechanical
actuator
主电路的核心是一块智能功率模块(intelligent power module,IPM),它将三相逆变桥和器件的驱 动电路全部集成在一起,并且具有过流保护和故障 信号输出的功能。采用这种模块能够有效地简化系 统结构并提高系统可靠性。
控制电路的核心是一块定点DSP芯片 TMS320F2812,并且通过2块复杂可编程逻辑器件 (CPLD)控制了丰富的外围电路[5J。其中CPLDl主 要处理片选、通信等功能,CPLD2主要处理PWM 和保护功能等。特别提出的是控制电路板上设置了 为双口RAM留出的通信接口,能够实现与嵌入了 更高级的处理器的其他电路实现连接,达到双CPU 工作的目的,既可以提高系统运算能力,也能够为系 统工作于光电通信模式下提供接口[6]。控制电路的 总体结构如图2所示。
双余度无刷直流电动机的建模与余度控制技术
双 余 度 无刷 直 流 电动 机 的 建 模 与 余 度 控 制 技术
马 瑞 卿 , 卫 国 , 永 亮 刘 杨
( 北 工业 大 学 , 西 西 安 70 7 ) 西 陕 10 2
摘
要: 参考 自感 和相 间互感 的关系公式 , 立了双余 度无刷直流 电动机 的数学 模型 。在 Ma a/ iuik环境 建 tbS l l m n
( otw s r o tcncl nvr t, in7 7 , hn ) N r et nP l eh i i sy X 0 2 C ia h e y aU ei h 1 0
A s atI i ppr tem te t a m dl f u l rd n ac rsl s Cm tr D bt c : t s ae ,h a macl oe o a — eu dn y uh s D oo ( R—B D M)w sb i r nh h i d b e LC a ul t
关键词 : 无刷直流 电动机 ; 双余度 ; 建模 ; 余度控制
中图 分 类 号 : M3 T 3 文献标识码 : A 文章 编 号 :0 4— 0 8 20 )7- 0 2—0 10 7 1 (0 8 0 0 3 4
M o l n Re un nc nt o fDu l— Re und nc u h e sDC o o dei a d d da y Co r lo a - d ng a y Br s l s M tr MA i ig, I We Ru —qn L U i—gu Y o, ANG 0 g—la g yn in
维普资讯
驱 控
… / r 2— … 一… … … -… - … 一 … … … … - 一- - … - … 一 … … … - … - - … 一- 一 … … …
基于DSP和CPLD的电动静液作动器双余度控制器设计
Ke o d :lc oh dot i atao( H ) d a— d n a c o t l rD P C L yw r s e t —y rs t c t E A ; ul eu d nycnr l ; S ; P D er ac u r r oe
机载作 动 系统是 各种 飞机 实 现飞行 姿 态和 飞行 轨 迹 控制 的关键 飞行控 制 子 系 统 之 一 , 性 能 优 劣直 接 其 影 响着 飞机 的整 体性 能 , 如机 动性 、 安全 可靠 性及 战 伤
基 于 D P和 C L S P D的 电动静 液作 动 器双 余度控 制 器设 计
・ 9・ 3
基 于 D P和 C L S P D的 电动 静 液 作 动 器 双 余 度 控 制 器设 计
付 永 领 ,王 利剑 ,齐 海 涛 , 和 松 刘
( 京航 空航 天大学 自动化科学与 电气 工程学院 , 北 北京 10 9 ) 0 1 1
精 密制 造学 等 的发展 , 电力 作 动 系 统 ( l tcl o - ee r al p w ci y
ee cut nss m) 到 了极 大 的发 展 , 来 将 成 为 rdata o yt 得 i e 未
主 要 的机载 作 动系统 。
后生存率等 。传统的机载作动系统为阀控 系统 , 类 该 系统具有频响高, 功率大等优点 , 但能量利用效率低 , 只有不 到 3 % ; 压管路 遍 布 机 身 , 护 性 差 ; 伤 生 0 液 维 战 存 力低 。随着未 来 飞机 向高 机 动性 、 高 音 速 及 大 功 超 率 方 向的发 展 , 求机 载作 动 系统 具有 更高 的性 能 , 要 传 统 机 载系 统 中快 速 响 应 与 高 效 率 之 间 的矛 盾 更 加 突 出 。同时 飞 控 系 统 正 在 向 功 率 电 传 ( B ,o e y P W pw rb wr ) 向发展 , 着 电动机 技术 、 料 技 术 、 制 学 和 i 方 e 随 材 控
机载电液作动器驱动器的双余度控制
2 双绕组无刷直流电机及其控制系统简介
双 绕 组 无 刷 直 流 电 动 机 属 于 电 气 余 度 结 构 , 其定 子绕组是由两套空间相差 3 0 °电角度的三相集中绕组 构成,采用双 U 形接法,共用一个稀土永磁转子。两
件的导通应力,提高了系统的可靠性。而且当一路出现 故障时,可以马上切断,剩余的一路还可以正常工作, 并且完成工作任务,以实现“故障 - - 工作”的原则。 双余度无刷直流电动机系统图如图 1 所示,主要由
Power Electronics | 21
《电力电子》 2006 年 1 期
系统控制与仿真
System Control & Simulation
1 2 0 °、1 5 0 °、2 4 0 °、2 7 0 °电角度的互感。有:
m30 = − m150 = 3 m m, m120 = m240 = − , m270 = 0 。 2 2
I s' 1 = 2 I N ≈ 1.414 I N (11)
对 应 的 电 磁 转 矩 为:
(a) 双余度位置响应曲线
T1N = C I ≈ 1.414CT I N = 0.707TN (12)
' T s1
2 ∆PcuN = 2( I s21 + I s22 5 控制算法流程图
5 实验结果及结论
在位置输入为 1 0 度的情况下对 E H A 系统进行实 验,得出单双余度的位置响应曲线如下所示。
式中, 为电机相绕组的额定电流。电机的额定转矩 为:
双余度电机的双通道结构及简化等效电路如图 2 所示:
dI dI U = 2( r0 + rs ) I s1 + 2 Ls s1 + Lm s 2 + E1 d1 dt dt (3) U = 2(r + r ) I + 2L dI s 2 + L dI s1 + E d2 0 s s2 s m 2 dt dt
新型的电动静液作动器研究
维普资讯
20 0 8年第 3期
液压与 气动
5 l
筒位 移输 出的 目的。 蓄 能器兼 作 油 箱 , 过 两 个溢 流 通 阀连 接到 系统 , 系统 的 压力 始 终 不低 于蓄 能 器 的压 使 力, 防止油液 中气 穴 现象 的发 生 。为 了保 证 系 统 的安
W ANG e g I n P n ,J AO Ra g
( 京 科 技 大 学 机 械学 院 , 京 10 8 ) 北 北 00 3
摘
要: 该文概 述 了一种 新型 的 电动静 液 双余 度 作 动 器 , 即直传 闭环 E A。介 绍 了系统 的工作 原 理及 H
特 点。指 出 了直传 闭环 E A的应 用前景 。 H
高压力 。系统 的外 环为 压 力环 , 由两 个 压 力传 感 器 测 试 液压 缸两腔 中 的压力 并 加 以 比较 , 而 控制 系统 的 从
输 出力 。 3 直传 闭环 E A 系统 的特点 及应 用 H
我国的经 济发 展和环保意识 的提高, 传闭环 E A 直 H 系 统必将 在上述 领域 中得 到更广 泛 的应 用 。
服 电机 驱动 , 过齿轮 减速器 、 经 滚珠 丝杠传 递到液 压活
塞 变为直 线运 动l 。与 传 统 的液 压 系统 不 同 , _ 4 j 其原 理
是通 过 电机 调 速 , 接 驱 动 定 量 泵 , 制 定 量 泵 的 转 直 控
速 , 而控制泵 输 出的压力 和流量 , 从 最终达 到控制 作动
2 方 案分析 与原理设 计
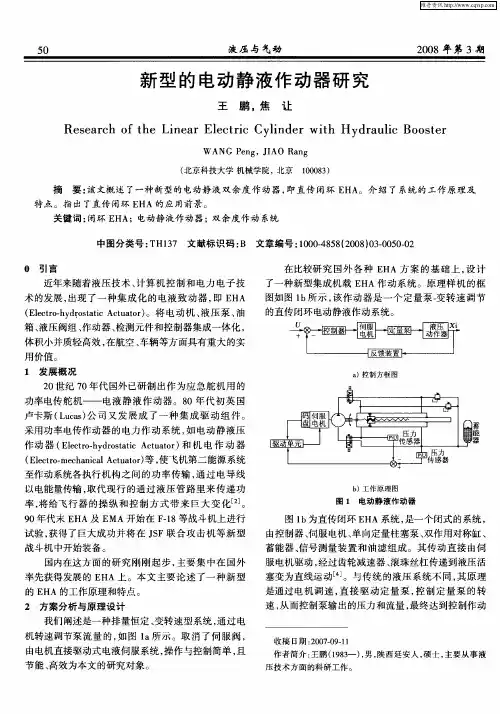
b)工 作 腺 理 图
图 1 电动 静 液 作 动 器
图1 b为直传 闭环 E HA系统 , 个 闭式的 系统 , 是一 由控制器 、 伺服 电机 、 向定量 柱塞 泵 、 单 双作 用对称 缸 、 蓄能器 、 号测 量装 置 和 油滤 组成 。其传 动 直接 由伺 信
飞机双余度全电刹车驱动控制器设计与研究
很好地跟踪压力给定 , 电机两个余度绕组实现 电流均衡 , 整个 系统超调小 、 稳态精度高 、 能优 良。 性 关键词 : 飞机全 电刹车 ; 双余 度无 刷直流电动机 ; 均流策略 ; 余控制 冗
中图 分 类 号 : M3 1 T 8 文献标识码 : A 文 章 编 号 :0 4 7 1 (0 2 0 - 0 9 O 10 - 0 8 2 1 ) 7 04 一 4
smu ain fd a — e u d n y b u h e sDC moo d la d s se mo e e e gv n T e smu ai n n x e i n a i lt so u l r d n a c r s ls trmo e n y tm d lw r ie . h i l t sa d e p r o o me tl r s h h w a e p r r n e o icatb a ig di e c n rl ri p re t e u s s o t t h e f ma c far r r k n r o t l s ef c . h t o f v oe Ke r s ar r tee t c b a ig; u l r d n a c u h e sDC mo o ;u r n - a a c t tg ;e u d n y c n rl y wo d : i a lcr r k n d a — e u d n y b s ls tr c r e t b l n e s ae r d n a c o t cf i r y o
双余度机电作动伺服系统数学模型与特性_罗战强
。尤其是采用永磁无刷直流
电机作为 EMA 的动力源,易于实现伺服作动系统 的数字化、集成化,使作动系统的通用性、维修性 大幅提高。 双余度永磁无刷电机作为机电能量转换单元, 驱动机电作动系统(简称系统)带动飞机舵面完成 伺服运动。本文根据电气双余度机电伺服作动系统 的组成及工作原理,分析了系统不同的工作模式, 建立了系统的数学模型,并分析了主主双通道工作 模式下,电磁转矩纷争存在的原因与后果。针对双 余度伺服系统特点提出了系统的控制策略,并采用
the advantages of small size and high power density. Dual-redundancy permanent magnet brushless motor(DRPMBLM) used in servo system improves the reliability of the work. The dual-redundancy servo actuation system mathematical model is established by the different system work modes and DRPMBLM of the structure characteristics of comparison. The cause and consequence of unequal torque in DRPMBLM are analyzed. The equal torque is realized by using crossed-feedback control and equalization algorithm or eliminated unequal torque. Theoretical analysis and experimental results show that the method can effectively eliminate the redundancy motor torque unequal. The system frequency response can achieve 3Hz, which can meet the requirements of electrically powered actuation system of more electric aircraft and all electric aircraft. Keywords : Electromechanical actuator, dual-redundancy permanent magnet brushless motor, servo system, torque unequal 统 的 EPAD 计 划 ( Electrically Powered Actuation Design )[2,3]。到上世纪末,电力作动系统已经完成 了在 F218 、 F216、 C2141 等战斗机上的试飞验证, 并开始装备到最新的 F 35 战斗机、无人驾驶飞机、 导弹、联合制导攻击炸弹及航天飞机 X 38 等先进 飞行器中,同时也开始了在波音 787、波音 777、空
双余度伺服系统余度分析与重构
(贵州航天控制技术有限公司,贵阳550009)摘要:本文针对双余度伺服系统的余度资源进行分析,通过控制策略对系统进行重构,保证即使出现多个故障点时,伺服控制器依然可以工作,最大程度地提高伺服系统的任务可靠度。
关键词:双余度;伺服控制器;工作模式;重构作者姓名,等:题名0引言伺服系统是飞行器系统不可缺少的关键组成部分,余度技术可以在相对降低对元器件的要求的同时,有效提高飞行器系统可靠性.因此,提高伺服系统可靠性的有效途径之一就是增加伺服系统的余度,通过伺服控制器的双余度设计使得完全双余度伺服结构的实现成为可能,飞行器系统的可靠性得以大大提高。
伺服系统采用并联+串联的双余度设计方式,最大限度的保障系统的可靠性。
信息处理器、通讯接口、电机驱动器模块、无刷直流电机和位置传感器等部件均采用了并联冗余,一直处于同时工作状态,当一路出现故障时,通过控制策略对系统进行重构,保证即使出现多个故障点时(故障点在不同的位置),伺服控制器依然可以工作,最大程度地提高伺服系统的任务可靠度。
1伺服系统余度组成伺服控制器采用成熟的双处理器架构,主备工作模式,同一时刻只有一个通道工作,独立完成控制信号的输出;由上位机或仲裁电路决定驱动模块接受主控处理器还是备用处理器的控制信号;控制器通过CAN总线接收飞管计算机控制命令;信号采集电路独立采集舵反馈位置信号、二次电源电压信号、母线电压电流等其他的各种信号;双处理器通过双口RAM交互信息实现作动器控制器余度间的交叉通道数据交互,满足伺服控制和故障监控设计的需求。
处理器通过采集的各种信号进行在线故障分析、诊断和重构,保证任意环节在单点故障时,系统依然可以正常工作,并保证其性能不降级。
2余度资源分析1)控制器余度资源分析伺服控制器采用双控制器热备份工作,主备控制器通过双口RAM进行信息交互,并同时综合两个控制器的信息进行作动器的故障诊断、余度管理以及闭环解算功能,通过仲裁逻辑电路,决定哪个控制器来驱动电机,当其中一个控制器出现不可恢复的故障时,另一个控制器将仅使用自身采集的信息对其他的功能模块进行故障诊断,以及系统的闭环解算,对作动器进行运动控制。
一种大尺寸、双余度、无接触多极旋转变压器的研制
77 3 试 验 安装 示 意 图
( )选定被测无接触多极旋转变压器 的某一基准零 位, 1
高其内部磁密 。
读取基准双通道旋变发 送机 的编码角 度 ( 为方便 计算 , 要 求一 。 。 6 ) 6 ≤o< 。 ,以此角度作为基准零点角度 ;
( )每 隔 机 械 角 18 左 右 , 基 准 双 通 道 旋 变 发 送 机 编 2 .。 读 码 的角 度 0 被 测无 接 触 多 极 旋 转 变压 器 编 码 的 角 度 , 一
无接触旋转 变压器利用环形变压器 , 将激磁 信号从定子 耦合 制 。环形定子线 圈用 F 4镀银铜 芯聚 四氟 乙烯绝 缘线在工 F 到转子 , 取代一般旋转 变压器 中电刷 和滑环结 构 , 省略 了电 装上绕制好预 固定后 , 再塞 人环 形定 子内, 形定 子铁心齿 环 刷与滑环 的电接触和机械接触 , 具有更 高的可靠性 。 上开两个沟槽 , 内插 环 氧板 , 以 固定支 撑环 形定 子线 圈 。 用
器 , 用 相 对测 试 法 以等 效 的方 法 测 试 其 电气 性 能 。试 验 安 采
整体结构上采用双余度设计 , 环形 变压 器部分采 用单体 双备份 , 旋转变压器部分采用绕组备 份。综 合考虑各 部分 的 机械强度 , 合理分配各零部件 的结构尺 寸。整体结构 图如图
1所示 。
装示 意图如 3所示 。由于该 无接触 多极旋 转变压 器的 电气
误 差 要 求 小 于 ± 因此 , 准 双 通 道 旋 转 变 压 器 发 送 机 的精 1, 基 机 电气 误 差 要 求 小 于 1” 先 在 一 般 的光 学 分 度 头 上 校 准 基 0( 准 旋 转 变 压 器 的 电 气误 差 ) 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ISSN 1000-0054CN 11-2223/N 清华大学学报(自然科学版)J T singh ua Un iv (Sci &Tech ),2008年第48卷第1期2008,V o l.48,N o.1w 2http://qhx bw.chinajo 双余度电动作动器电气设计与实验蒋 栋, 赵争鸣, 郭 伟, 孙晓瑛, 王世静(清华大学电机工程与应用电子技术系,电力系统及大型发电设备安全控制和仿真国家重点实验室,北京100084)收稿日期:2006-10-18作者简介:蒋栋(1983—),男(汉),湖南,硕士研究生。
通讯联系人:赵争鸣,教授,E -mail :zhaozm @mail .tsin ghua .edu .cn摘 要:为了适应高性能高可靠性直线传动伺服系统的要求,设计一种双余度电动作动器。
主要包括:2台新型的同步磁阻永磁(SR-PM )电机,2套智能功率模块逆变电路,2套数字信号处理器的控制电路和2套直线位移传感器系统。
系统采用了位置闭环下的矢量控制和双余度控制策略。
在此基础上,对系统进行了动态响应实验和故障切换实验,其中阶跃位置响应和正弦位置响应实验均实现了快速位置跟踪,保证了实验在故障发生时刻迅速实现电机运行模式的切换。
实验结果表明:系统能够保证快速的动态响应和较高的可靠性,能够适应高性能传动控制系统的要求。
关键词:电气传动;余度;电动作动器;同步磁阻永磁电机;动态响应中图分类号:T M 921.4文献标识码:A文章编号:1000-0054(2008)01-0005-04Design and experiment of double redundancy electrical -mechanicalactuatorJIANG Don g ,ZHAO Zhen gming ,GU O Wei ,SUN Xiaoying ,WANG Sh ijing(State Key Laboratory of Control and Simulation of Power Systems and G eneration Equipment ,Department of Electrical Engineering ,T s inghua University ,Beij ing 100084,China )Abstract :A double redun dancy electrical-m echan ical actu ator wasdes igned for high-performan ce and high reliable lin ear dr ive servo sys tem.T hiselectr ical-mechanicalactu atorcon tainstw osynchronous reluctance with permanent mag net (SR-PM )motors an d drive s ystem s,tw o inverter s with intelligent pow er m odu le (IPM ),tw o control circuit s ystems w ith high -performance digital sign al process or (DS P)and tw o lin ear pos ition sensor sys tems.Position feedback-based vector control and double redundancy control s trategies achieve high reliability an d fast r espon se.Dynamic response experiment and er ror-sw itchin g experimen ts show th at the sys tem quick ly track s the reference position in dynamic ex perim ents w ith both a step referen ce pos ition and a sin usoidally varying reference position.T he s ystem can s witch the run ning mode w ithin the error time in the err or sw itchin g exp eriment.T hus th e s ystem achieves fast dynamic respons e and high reliability in high -performance electrical drive s ystem s.Key words :electrical drive;redundancy;electrical-m echan ic actu ator;syn chronous reluctancew ithper manentmag net motor ;dynamic respons e作动器是运动控制装置进行机动动作的传动机构,它的发展经历了早期的机械传动到后来的液压传动,到最近发展起来的全电传动这个过程。
液压伺服系统占系统重量比较大,不利于系统集成,并且降低了可靠性。
随着全电化传动系统概念的提出,电动作动器成为目前伺服传动系统研究的热点。
国内外最近开始这方面的研究,目前采用的主要是无刷直流电机和永磁同步电机驱动下的小功率电动作动器[1-3]。
在电动作动器的研究中,2个关键的问题是:如何提高系统的可靠性;如何增大系统的功率密度。
在提高可靠性上,主要应用的是余度技术,即对系统采用冗余设计实现。
提高系统的功率密度的主要方法是应用高功率密度电机实现传动。
设计了一种基于双余度控制策略和高功率密度同步磁阻永磁(SR -PM )电机的电动作动器的电气设计,用于满足可靠性和功率密度这2个要求。
在设计的基础上,通过动态响应实验和故障切换实验,验证系统的性能。
1 双余度电动作动器系统设计1.1 总体结构本文设计的电动作动器系统包括了基于行星齿轮传动箱的速度合成机械传动系统、2台同步磁阻永磁电机及其驱动控制系统、电源供电与主电路供电系统等。
一套电动作动器由2台电机联合拖动运行,行星齿轮实现2台电机的速度合成、减速和直线运动转换。
对于系统的闭环控制,关键采用了基于直线位移传感器LVDT 来检测作动器拉杆位置的方法实现系统的位置闭环控制。
电机控制采用的是位置闭环下的矢量控制策略,双电机采用了主-从模式,实现了故障条件下的运动状态切换。
系统的总体结构如图1所示。
其中核心控制芯片为数字信号处理器(DSP ),它包含了脉宽调制(PWM )接口,为基于智能功率模块(IPM )的主电路提供驱动信号。
作为驱动电机的是同步磁阻永磁电机(SR-PM 电机)。
图1 双余度电动作动器硬件结构1.2 同步磁阻永磁电机同步磁阻永磁(SR-PM )电机是近年来发展起来得一种新型特种电机,它集成了永磁同步电机和磁阻电机的优点。
电机转子为圆形的轴向迭片,中间嵌有永磁材料,安装在导磁的钢制构架上,定子为普通的异步电机定子结构。
这种新型电机的主要特点为[4]:1)允许q 轴磁力线通过整个转子表面而获得最大的q 轴电感;2)由于d 轴方向存在多层永磁材料,其磁特性相当于气隙,阻碍d 轴磁力线的通过,而使d 轴电感很小;3)永磁体镶嵌在迭片之间,其磁场与q 轴电流作用产生一个正转矩。
由于这些特点,SR-PM 电机具有较永磁电机和磁阻电机更高的功率密度;另外,这种电机具有天然的转矩冗余性,在永磁失磁的情况下还可以通过磁阻转矩拖动负载,能够适用于对可靠性要求很高的传动控制领域。
应用于电动作动器的SR-PM 电机额定转速为11000r /min ,额定功率1kW ,额定转矩1Nm 。
在2台电机合力驱动下,如果拉杆的运动速度为100mm /s ,输出推力可以达到125kN 。
1.3 硬件电路设计电动作动器的硬件电路主要包括了逆变主电路和控制电路2部分。
作为双余度双电机控制,主电路和控制电路各采用2套。
根据余度控制的要求,分别设置为主板和从板。
电动作动器的2套位置传感器(LV DT )的驱动电路设置在2块控制电路板上。
主电路的核心是一块智能功率模块(intellig ent pow er mo dule ,IPM ),它将三相逆变桥和器件的驱动电路全部集成在一起,并且具有过流保护和故障信号输出的功能。
采用这种模块能够有效地简化系统结构并提高系统可靠性。
控制电路的核心是一块定点DSP 芯片T M S320F2812,并且通过2块复杂可编程逻辑器件(CPLD)控制了丰富的外围电路[5]。
其中CPLD1主要处理片选、通信等功能,CPLD 2主要处理PWM 和保护功能等。
特别提出的是控制电路板上设置了为双口RAM 留出的通信接口,能够实现与嵌入了更高级的处理器的其他电路实现连接,达到双CPU 工作的目的,既可以提高系统运算能力,也能够为系统工作于光电通信模式下提供接口[6]。
控制电路的总体结构如图2所示。
为了准确测量作动器的拉杆位置,电动作动器采用了直线位移传感器LVDT 作为位置检测工具。
它实际上是一个差动变压器,位移反映在拉杆(金属芯)上。
这种位移传感器理论上误差可以控制在0.05%以内,能够有效地应用在高性能直线位置控制上。
1.4 系统软件设计系统的软件包括主程序和中断子程序。
主程序实现对参数和寄存器的初始化,并将需要使用的中断写入的中断矢量表。
中断子程序主要实现2类功能:位置闭环下的电机矢量控制以及双电机带动作动器的余度控制。
SR -PM 电机在位置闭环下的矢量控制的原理是:控制系统的位置伺服指令给定后,与实际位置进行相减后经过比例积分(PI)调节器计算得到速度参考信号,此信号与编码器传回的实际速度信号相减后经过速度闭环的PI 调节器得到能够产生力矩的q 轴方向参考电流,d 轴电流由程序预先设定,实际的电流信号由电流检测函数得到,2组电流经过电流环PI 调节得到电压参考信号,进而产生有效6清华大学学报(自然科学版)2008,48(1)A DC:模拟信号输入接口;QEP:光电编码器接口; EM IF:外部存储器接口;SPI:串行外设接口;SCI:串行通信接口;CA N:Co ntro ller A rea Net wo rk;M cBsp:多通道缓存接口;SRA M:静态随机存取存储器图2 控制电路结构框图的三相PWM信号供给电机,使电机旋转。