01静定结构位移计算
静定结构的位移计算—图乘法计算静定结构的位移(建筑力学)

ql 2 8
) (5 8
l) 4
5ql 4 384 EI
()
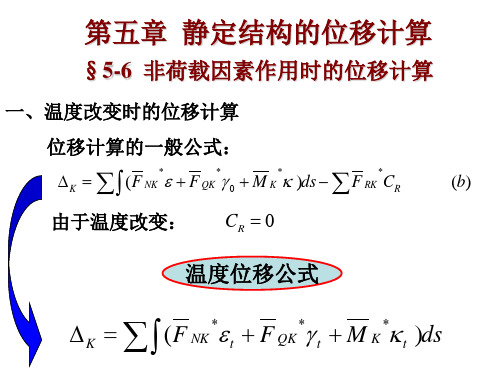
温度变化时位移计算公式
设结构上侧温度变化t1,下侧温度变化t2,则杆轴线处温度变化为t0 =(h2t1+h1t2)/h。
此时任一微元体变形如图所示,包括两种形式:
①轴线伸长量du; ②截面转角dθ。
使用公式 L t L 和图中的几何关系,不难得到:
l
l
]
[t0
0
l
t h
1 2
l
l
]
-6l 18l 2 6l(1 3)()
h
h
N图
M图
支座位移时结构位移计算公式
支座位移直接引起结构位移,并不引起结构变形。因此,仅有支座位移时, 结构微元体变形为0。所以,虚拟状态内力虚功为0。将这一结论代入结构位移计 算的一般公式,即可得到支座位移时结构的位移计算公式:
N Nds EA
荷载作用下位移计算步骤
(1)计算位移状态(实际状态)结构内力:M、Q、N; (2)假设虚拟状态(受力状态); (3)并求其内力 M、 、Q ;N (4)代入位移计算公式并求解。
计算示例
例:计算图(a)所示简支梁中点C处得竖向线位移(EI为常数)。
(a)实际状态
(b)虚拟状态
解:(1)计算实际状态弯矩
位置如图a所示。
(3)当图形的面积和形心位置不易
图b
确定时,可将其分解为几个简单的图形,分
别与另一图形相乘,最后把结果相加,图b。
图a
(4)当y0所在图形是由若干直线段
组成的折线时,应分段进行图乘,再进行叠
加,图c。
(5)当直杆各杆段截面性质不同,即
EI不同时,应分段图乘,再进行叠加,图d。
静定结构的位移计算—结构位移公式及应用(工程力学课件)

【例4】求图示桁架k点水平位移. (各杆EA相同)
P
P
0
NP 0
P a
2P k
a
1
1 2 2 Ni
Δ= FN FNP l
EA
1
1
解:
kx
1 [(1)(P)a EA
(1)( P )a
2 2P 2a] 2(1 2) Pa () EA
ds
FN FNP EA
ds
1. 梁和刚架
在梁和刚架中,由于轴向变形及剪切变形产 生的位移可以忽略,故位移计算公式为:
2. 桁架
Δ=
MMP EI
ds
Δ=
FN FNP ds FN FNP ds FN FNPl
EA
EA
EA
1
MMP EI
ds
kFQ FQP GA
ds
FN FNP EA
ds
若结构只有荷载作用,则位移计算一般公式为:
1 (M ds FQ 0 FN )ds
MP
EI
0
kFQ P GA
FNP
EA
1
MMP EI
ds
kFQ FQP GA
ds
FN FNP EA
ds
适用条件:小变形、线弹性
➢ 正负号规则
1
MMP EI
ds
kFQ FQP GA
ds
FN FNP EA
M、FQ、FN、FRK :单位载荷 FP1 1在结构中产生
的内力和支座反力
➢ 单位荷载法
一次计算一种位移
求绝对位移!
BF
C
D
q
实际状态
(位移状态)
CH求、CV、C
静定结构的位移计算——非荷载因素作用时的位移计算
t
h SMK
对 桁 架:
K t0 F NKl
例 1 : 计算图示结构C点竖向位移
C
t1
t2
A
已知:t2 30oC,t1 10oC, 105, h 0.5m
10m
CV 2356105 (m) ()
4m 4m
例 2: 计算图示桁架结构B 点竖向位移
t t t t B
a
B 8t a( )
*
F RK CR
(
FNP
F NK *
kFQP F QK*
MPM
* K
)ds
EA
GA
EI
温度
t0
S F Nk
t
h
S Mk
*
F RK CR
荷载 支座
P t C
作业: 5—29、5—31、5—32
t1
h1 t0 dt h h2
(令t2 t1)
t2 t2 - t1
设温度沿杆件截面厚度方向成线性变化。
截面上、下边缘温差: t t2 - t1
杆轴线处温度改变值t0 :
t0
t1 dt
t1
h1 h
(t2
-
t1
)
=
h1t2
h2t1 h
图示结构,设外侧温度改变 t1 ,内侧温度改变 t2 ,
(
)
例5: 求图示桁架温度改变引起的AB杆转角。
t t t t B
a
A
4a
AB 4 t( )
静定结构多因素下的位移计算一般公式:
K
*
*
*
*
等于0
(F NK F QK M K )ds F RK CR
(b)
静定结构的位移计算

第4章
二、单位荷载法
1、定义:应用虚力原理,通过加单位力求实际位移的方法。 2、计算结构位移的一般公式
PK=1 RK
1
RK RK3
2
( a , a , a , Ca )
位移状态
RK
4
(M K ,Q K , N K , RK )
虚力状态
对上述两种状态应用虚功原理:
1 Ka R K 1 C a1 R K 2 C a 2 M K a ds Q K a ds N K a ds
P/2
P/2
c
c
CV
4、结构的动力计算和稳定分析中,都常需计算结 构的位移。
第4章
三、计算位移的有关假定
2、小变形假设。变形前后荷载作用位臵不变。 3、结构各部分之间为理想联结,不计摩擦阻力。 4、当杆件同时承受轴力与横向力作用时, 不考虑由于杆 弯曲所引起的杆端轴力对弯矩及弯曲变形的影响。
ω1
ω2
MP图
1 Δ (ω1 y1 ω2 y2 ) EI
第4章
3、当杆件为变截面时亦应分段计算; y1
EI1
y2
EI 2
MK图
ω1
EI1
ω2
EI 2
MP图
1 1 Δ ω1 y1 ω2 y2 EI1 EI 2
第4章
4、图乘有正负之分:弯矩图在杆轴线同侧时,取正号; 异侧时,取负号。
13860 0.0924m( ) EI
第4章
例题 试求左图所示刚架C点的竖向位移AV和转角C。 EI 1.5 105 KN m 2 各杆材料相同,截面抗弯模量为:
MB A
力状态(状态1)
01静定结构位移计算

§4.2 变形体虚功原理
五、直杆系虚功方程
q FPx p
δWe = δW =δWi q(s) 取任一单元
* FQj
* FNi
* FNj
M i* F i m(s) * Qi
j
p(s)
θ(s)
M* j
δWe 的计算:
δWei,j [ pδu qδv mδ ]d s
i 当无集中荷载时: δWe =Σ∫[pδu+qδv+mδθ]ds
l
M 2 ( x) FP 2l 3 dx 2 EI 6 EI
V FPl 3 FP 3EI
?
推导过程使用了互等定理,所以只适用线弹性结构
§4.0 理力材力相关内容回顾 四、摩尔定理(公式)
l
FN ( x)FN 0 ( x) T ( x)T 0 ( x) M ( x)M 0 ( x) dx dx dx EA GI p EI
l
l
FN ( x)、T ( x)、M ( x) - -结 构 在 原 载 荷 下 的 内 力 FN ( x)、T ( x)、M ( x) - -去 掉 原 载 荷 , 在 所 义 广 求 位移点,沿所求广移的方向加广义单时, 义位 位力 结构产生的内力
0 0 0
推导过程使用了两种力施加不同顺序得出结果相同, 所以只适用线弹性结构
X AΔ 0
YA
YB
§4.2 变形体虚功原理
一、虚位移、虚力
对一变形体
FP 力状态:平衡方程 FP/2 FP/2 满足平衡条件 FP 位移状态:协调方程 满足协调条件:光滑、连续、满足约束、微小
§4.2 变形体虚功原理
一、虚位移、虚力
静定结构的位移计算—结构位移计算的一般公式(建筑力学)

W外 P Ri ci
根据虚功原理得:
W内 Md Qds Ndu
Md Qds Ndu Ri ci
①求线位移 其虚拟状态的外荷载为与所求线位移同位 置、同方向的一个单位集中力。 ②求角位移 其虚拟状态的外荷载为与所求角位移同位 置的一个单位力偶。
求线位移
求角位移
ห้องสมุดไป่ตู้
位移计算的两种状态
③求相对线位移
其虚拟状态的外荷载为与所求相对线位移
的两点连线共线、方向相反的一对单位集中力。
④求相对角位移
其虚拟状态的外荷载为作用在所求相对角 位移的两个截面位置处的一对转向相反的单位 力偶。
②结构任一微元体变形
轴向变形 du、切向变形 、ds角位移 。d
位移计算的两种状态
2.虚拟状态(受力状态)
指结构在某种因素(荷载、温度变化、支座位移等)作用下产生位移的之前所处的受力平衡 状态。该平衡状态一般是未知的,它并不影响实际的结构位移,通常可以随意假设,因此也称为 虚拟状态。通常假设虚拟状态的外荷载为与所求位移对应的单位荷载。具体对应关系如下:
虚功原理
1.实功与虚功
(1)实功:力×位移(位移由做功的力引起) (2)虚功:力×位移(位移由其它因素引起)
2.虚功原理 W外 W内
位移计算的两种状态
1.实际状态(位移状态)
指结构在某种因素(荷载、温度变化、支座位移等)作用下产生位移的时刻所处的状态。此 时,结构位移和变形表示为:
①支座的位移
水平位移 c1、竖向位移 、c2转角 。 c3
M
求相对线位移
虚拟状态中,由外荷载引起的支座反力和内力分别记为:
支座反力:水平反力 R、1 竖向反力 、R 2支座转角 。R3 内力:弯矩 M、剪力 、Q轴力 。N
结构力学——静定结构位移计算

结构力学——静定结构位移计算在工程和建筑领域中,结构力学作为一门重要的学科,主要研究了结构的受力、变形、破坏机理等问题。
其中,静定结构位移计算是结构力学中的一个重要内容。
静定结构所谓静定结构,是指能够通过静力学方程求解出所有节点的受力、反力和变形的结构。
这种结构是不需要知道材料的物理性质和荷载的实际情况的。
在静定结构中,结构的支座固定方式和荷载情况是已知的,因此能够通过解决一组静力学方程,求解出结构中节点的受力和变形。
静定结构位移计算静定结构位移计算是静定结构的重要计算方法之一。
在结构分析中,位移是一种常见的形变量,它反映了物体在载荷作用下发生的形变情况。
在静定结构中,位移是结构的重要参数之一。
它可以通过求解一组线性方程组得到。
具体来说,就是通过应变—位移—节点力关系,将结构各节点位移用系数矩阵和加载节点力表示出来,再通过求解一个线性方程组,就可以得到各节点的位移值。
静定结构位移计算的步骤静定结构位移计算中的步骤包括:1.列出节点位移方程节点位移与内力之间有一定的关系,可以通过位移方程和内力方程来表示。
这些方程可以根据物理实际条件进行建立。
2.确定支座反力支座反力是从位移计算中得到的结果之一。
支座反力是指结构上所有支点所承受的力,在位移计算时是必须考虑的。
3.形成节点位移方程组形成节点位移方程组时,需要考虑杆件的个数、受力条件、材料特性、支座情况等因素。
4.解出节点位移通过解一个线性方程组,我们可以根据已知的节点力和位移方程,求出每个节点的位移值。
静定结构位移计算的应用静定结构位移计算在现代工程设计中具有广泛的应用。
它能够在保证结构稳定的前提下,可以对结构进行优化设计,提高结构的安全性、稳定性、经济性等方面的性能。
除此之外,静定结构位移计算还可以应用于建筑设计、桥梁设计、机械设计、工业生产等领域中。
它可以提供结构设计的数据支持,为结构工程的实施提供参考。
静定结构位移计算是结构力学中的一个重要方向,其计算方法基于静力学方程进行,其特点是简单、可靠和实用。
结构力学 静定结构的位移计算1
P
A
3.位移计算的一般公式
设:结构受荷载的作用, 及支座移动,求A点的竖 向位移。
W外=W变
外力所作的虚功总和W外,等于 各微段截面上的内力在其虚变 形上所作的虚功的总和W变 。
1)位移状态的设定 q
P A
dx
a) 若求结构上C点的竖向位移,
2) 若求结构上截面A的角位移,可在截面处加一单位力矩。
若求桁架中AB杆的角位移,应 加一单位力偶,构成这一力 偶的两个集中力的值取 1/d。 作用于杆端且垂直于杆(d等 于杆长)。
3) 若要求结构上两点(A、B)沿其连线 的相对位移,可在该两点沿其连线 加上两个方向相反的单位力。
A
2)作 M 图 P=1
A C
1.5 M1 图
B 2m
6
B
B
D
66
A
BB
D
9
1
CV
1 1 61.5 3
EI 2
2 2 3 9 5 1.5
EI 3
8
189
=
(向下)
4EI
2)作 M 图
A
BD
6 6
M2 图
A
BB
D
9
1
D
1 EI
一、概述
1.位移的种类
1) 角位移:杆件横截面产生的转角 2) 线位移:结构上各点产生的移动 3) 相对位移(相对角位移,相对线位移)
Aθ
Δ A
θ
(A截面的转角θ )
(A结点的水平线 位移Δ,转角θ)
ΔA A
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§4.2 变形体虚功原理
五、直杆系虚功方程
q FPx p
δWe = δW =δWi q(s) 取任一单元
* FQ j
* FN i
* FN j
m ( s) M i* F i * Qi
j
p(s)
θ ( s)
M* j
δWe 的计算:
δWei,j [ pδu qδv mδ ]d s
i δv+mδθ]ds 当无集中荷载时: δWe =Σ∫[pδu+q
分割面内力
§4.2 变形体虚功原理 三、变形体虚功原理概述
前 提
力状态平衡
位移状态协 调
虚功原理宣告了一个数学等式
§4.2 变形体虚功原理 三、变形体虚功原理概述
位移是协调的
变形体上的位移状态 初始位形
变形位移 刚体位移
§4.2 变形体虚功原理 三、变形体虚功原理概述
前 提
力状态平衡
位移状态协 调
第二种算法
外力
变形位移
刚体位移
分割面内力
证明:计算各分割体上所有力所做虚功之和 δW:δW=∑(力×虚位移) = ∑ [力× (刚体虚位移+变形虚位移)] =∑ (力× 刚体虚位移)+ ∑(力×变形虚位移) 等于零
= ∑(力×变形虚位移)= δWi
总虚变形功
§4.2 变形体虚功原理 四、变形体虚功原理证明
j
u(s) v( s)
§4.2 变形体虚功原理
五、直杆系虚功方程
q FPx p
δWe = δW =δWi
δWe 的计算:
当无集中荷载时, δWe =Σ∫[pδu+qδv+mδθ]ds 当有集中荷载时 集中荷载处对应位移 δWe =Σ∫[pδu+qδv+mδθ]ds +Σ [FPxδu+FPyδv+Mδθ] i 集中荷载
FP1
虚功:力在非自身所产生的位移上所作的功
Δ1
1 W FP1 Δ1 2
FP2 FP1
Δ1 Δ2
W FP1 Δ2
§4.2 变形体虚功原理 三、变形体虚功原理概述 刚体虚位移原理
对于具有理想约束的刚体或刚体系,其 平衡的充分必要条件是,作用于刚体或刚体 系的外力在任意刚体虚位移时所做的总虚功 恒等于零
= ∑ [力× (刚体虚位移+变形虚位移)]
§4.2 变形体虚功原理 四、变形体虚功原理证明
第一种算法
外力
变形位移
刚体位移
分割面内力
证明:计算各分割体上所有力所做虚功之和 δW:δW=∑(力×虚位移) = ∑ [(外力+分割面内力)×虚位移]
为什么?
等于零 = ∑(外力×虚位移)+∑(分割面内力×虚位移 )
§4.2 变形体虚功原理 三、变形体虚功原理概述
前 提
力状态平衡
位移状态协 调
虚功原理宣告了一个数学等式
§4.2 变形体虚功原理 三、变形体虚功原理概述
前 提
力状态平衡
位移状态协 调
虚功原理宣告了一个数学等式
§4.2 变形体虚功原理 三、变形体虚功原理概述
整体是平衡的
外力
变形体上的力状态
局部是平衡的
YA
YB
§4.2 变形体虚功原理
一、虚位移、虚力
对一变形体
FP 力状态:平衡方程 FP/2 FP/2 满足平衡条件 FP 位移状态:协调方程 满足协调条件:光滑、连续、满足约束、微小
§4.2 变形体虚功原理
一、虚位移、虚力
不光滑
不连续
不满足约束
§4.2 变形体虚功原理
一、虚位移、虚力
对一变形体
FP
FP
l
l
§4.0 理力材力相关内容回顾 二、应变能
弯矩M,惯性矩 I,弹性模量E, 杆长l,转角(纯 弯梁)θ
弯曲
M M M
M
• 纯弯曲: 1 M 1 M M l 2 2 EI
2 M ( x) • 横力弯曲: V dx 2 E I ( x) l
V W
M 2l M 2l 2 EI 2 EI
刚体位移
分割面内力
证明:计算各分割体上所有力所做虚功之和 δW:δW=∑(力×虚位移) 两种算法 = ∑ [(外力+分割面内力)×虚位移]
第一种
= ∑ [力× (刚体虚位移+变形虚位移)] 第二种
§4.2 变形体虚功原理 四、变形体虚功原理证明
第二种算法
外力
变形位移
刚体位移
分割面内力
证明:计算各分割体上所有力所做虚功之和 δW:δW=∑(力×虚位移) = ∑ [力× (刚体虚位移+变形虚位移)]
FP 力状态:平衡方程 FP/2 FP/2 满足平衡条件 物理方程 FP 位移状态:协调方程 满足协调条件:光滑、满足约束、微小
§4.2 变形体虚功原理
一、虚位移、虚力
对一变形体
FP 力状态:平衡方程 FP/2 FP/2 满足平衡条件
位移状态:协调方程 满足协调条件:光滑、连续、满足约束、微小
§4.2 变形体虚功原理
§4.2 变形体虚功原理
五、直杆系虚功方程
δWe = δW =δWi
q
δWi 的计算:
取微段,其受力如下
p
微段受力 变形可看成有如下几部分 微段剪切
微段弯曲 微段拉伸 微段扭转
§4.2 变形体虚功原理
五、直杆系虚功方程
δWe = δW =δWi
总虚变形功 δWe = δW =δWi 外力总虚功 说明 虚功原理涉及的两个状态:虚力状态需要满足平 衡方程,虚位移满足协调条件 原理的证明过程没有涉及材料、形状等其他信息, 因此适用于任何结构 δWi= ∑(力×变形虚) = ∑(外力×变形虚+内力×变 形虚) 当隔离体是微元体时,外力×变形虚位 移是高阶小量,此时δWi =∑(内力×变形虚位移)。 一些书籍将δWi称为内力功
外力
变形位移
刚体位移
分割面内力
外力虚功=外力×虚位移 =外力×(刚体虚位移+变形虚位移) 虚变形功=力×变形虚位移 =(外力+分割面内力)×变形虚位移
§4.2 变形体虚功原理 四、变形体虚功原理证明
外力
变形位移
刚体位移
分割面内力
证明:计算各分割体上所有力所做虚功之和 δW:δW=∑(力×虚位移) 两种算法 = ∑ [(外力+分割面内力)×虚位移] 第一种 第二种
l
l
FN ( x)、T ( x)、M ( x) - -结 构 在 原 载 荷 下 的 内 力 FN ( x)、T ( x)、M ( x) - -去 掉 原 载 荷 , 在 所 义 求广 位移点,沿所求广移 义的 位方向加广义单时 位, 力 结构产生的内力
0 0 0
推导过程使用了两种力施加不同顺序得出结果相同, 所以只适用线弹性结构
=∑ (力×等于零 刚体虚位移)+ ∑(力×变形虚位移)
§4.2 变形体虚功原理 四、变形体虚功原理证明
第二种算法
外力
变形位移
刚体位移
分割面内力
∑ (力× 刚体虚位移)=0,为什么?
各分割体上的力系是平衡的 刚体虚位移原理:力系平衡刚体虚功=0
§4.2 变形体虚功原理 四、变形体虚功原理证明
外力
变形位移
刚体位移
分割面内力
证明:计算各分割体上所有力所做虚功之和 δW:δW=∑(力×虚位移) = ∑ [(外力+分割面内力)×虚位移] 等于零 = ∑(外力×虚位移)+∑(分割面内力×虚位移 )
= ∑(外力×虚位移)= δWe
外力总虚功
§4.2 变形体虚功原理 四、变形体虚功原理证明
外力
变形位移
1 W FP Δ 2
W V
§4.0 理力材力相关内容回顾 二、应变能
1 V W 2
轴向拉伸和压缩 轴(向内)力FP,弹性 模量E,截面面积A, 杆长l 1 FP l FP l FP FP 2 EA
FP 2l FN 2l 2 EA 2 EA
V
l
FN 2 ( x) dx 2 EA( x)
§4.0 理力材力相关内容回顾 四、摩尔定理(公式)
FP
M ( x ) FP x
M ( x) x
l F x 2dx F l 3 P P 3EI 0 EI
1
0
§4.0 理力材力相关内容回顾 五、刚体虚位移定理
刚体虚位移原理 对于具有理想约束的刚体或 刚体系,其平衡的充分必要条件是,作用于刚体 或刚体系的外力在任意虚位移时所做的总虚功恒 等于零,也即有如下虚功方程成立
l
M 2 ( x) FP 2l 3 dx 2 EI 6 EI
V FPl 3 FP 3EI
?
推导过程使用了互等定理,所以只适用线弹性结构
§4.0 理力材力相关内容回顾 四、摩尔定理(公式)
l
FN ( x)FN 0 ( x) T ( x)T 0 ( x) M ( x)M 0 ( x) dx dx dx EA GI p EI
第四章
静定结构的位移计算
Displacement of Statically Determinate Structures
问题:为什么计算结构的位移?
第四章
§4-1 结构位移计算概述
§4-0 理力材力相关内容回顾 §4-2 变形体虚功原理 §4-3 单位荷载法 §4-4 图乘法 §4-5 其它外因引起的位移计算(温度等) §4-6 互等定理
虚功原理宣告了一个数学等式