液压驱动Stewart平台轨迹规划
Stewart液压平台轨迹跟踪自适应滑模控制
Stewart液压平台轨迹跟踪自适应滑模控制
李强;王宣银;程佳
【期刊名称】《浙江大学学报(工学版)》
【年(卷),期】2009(043)006
【摘要】Stewart液压平台是一个多输入多输出(MIMO)非线性系统,其耦合运动过程中存在参数不确定性与干扰影响其轨迹跟踪精度,针对此问题,考虑了系统参数的不确定性,利用Backstepping方法结合滑模控制与自适应控制的优点,推导得到系统的多级自适应滑模控制器,以增强系统运行过程中对运动与力的跟踪性能.利用AMESim与MATLAB的联合仿真方法进行验证,与传统基于各缸位置偏差的比例-积分-微分(PID)控制器相比,结果表明,该方法在系统参数不确定所引起的干扰下,能更有效地降低各缸的位置和力的跟踪误差,从而提高了运动平台末端的动态跟踪精度.
【总页数】5页(P1124-1128)
【作者】李强;王宣银;程佳
【作者单位】浙江大学,流体传动及控制国家重点实验室,浙江,杭州,310027;浙江大学,流体传动及控制国家重点实验室,浙江,杭州,310027;浙江大学,流体传动及控制国家重点实验室,浙江,杭州,310027
【正文语种】中文
【中图分类】TP242
【相关文献】
1.一种大柔性Stewart平台轨迹跟踪控制方法的研究 [J], 訾斌;段宝岩;仇原鹰
2.液压并联6-DOF平台轨迹跟踪的干扰力补偿 [J], 李强;王宣银;程佳
3.液压驱动Stewart平台轨迹规划 [J], 赵慧;张尚盈
4.柔性支撑Stewart平台动力学建模与轨迹跟踪控制 [J], 段学超;仇原鹰;段宝岩
5.基于自适应滑模控制器的Stewart平台运动轨迹控制的研究 [J], 姚俊;窦颖艳因版权原因,仅展示原文概要,查看原文内容请购买。
stewart运动学分析
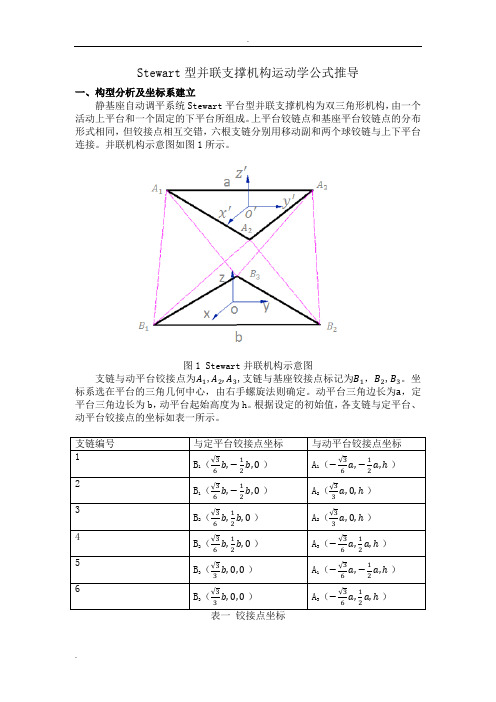
Stewart型并联支撑机构运动学公式推导一、构型分析及坐标系建立静基座自动调平系统Stewart平台型并联支撑机构为双三角形机构,由一个活动上平台和一个固定的下平台所组成。
上平台铰链点和基座平台铰链点的分布形式相同,但铰接点相互交错,六根支链分别用移动副和两个球铰链与上下平台连接。
并联机构示意图如图1所示。
图1 Stewart并联机构示意图支链与动平台铰接点为,,支链与基座铰接点标记为,,。
坐标系选在平台的三角几何中心,由右手螺旋法则确定。
动平台三角边长为,定平台三角边长为b,动平台起始高度为h。
根据设定的初始值,各支链与定平台、动平台铰接点的坐标如表一所示。
二、并联支撑机构正反解两个坐标系,o和,其中,o为固定坐标系。
(1)将坐标系o绕自身的x轴旋转γ;(2)将旋转后的坐标系绕固定坐标系的y轴旋转β;(3)将第二步的坐标系绕固定坐标系的z轴旋转α;旋转矩阵分别为按上述方式得到的总旋转变换矩阵为:设动平台的平移参数为(,,),则坐标的齐次变换矩阵为:对于与动平台铰接的各点(i=1,2,3),点的齐次坐标为,经过变换后的点对应标记为,变换后的齐次坐标为,则,带入初始坐标后,得出变换后与动平台铰接的各点坐标值为:===设六个驱动器的伸展长度为(i=1--6),则与之相应的六个方程式表示为:======由、、、、、经过上式推导得出的过程,称为Stewart平台的三、并联支撑机构速度/加速度分析设为沿驱动器i的单位矢量,为驱动器i的长度,运动平台质心到点的位置矢量。
和分别是运动平台在惯性参考系中的角速度和线速度矢量,则运动平台上点处的速度矢量为:矩阵形式为:式中^表示矢量的反对称矩阵。
对一个矢量x,有通过将运动平台上点处的速度矢量向驱动器方向投影(即用单位矢量点乘点的速度矢量),可以得到驱动器i的上下两部分沿驱动器方向的相对移动速度:将上式写为矩阵形式为:(), i=1,2,…,6用一个广义速度矢量V来表示运动平台的角速度和线速度,即末端直角坐标速度:用六维矢量来表示六个驱动器的上下两部分沿驱动器方向的相对移动速度,即关节速度。
Stewart六自由度动感平台结构优化设计

机 械 工 程 与 自 动 化 M ECHANI CAL ENGI NEERI NG & AUTOM AT1 0N
NO .5
0c t .
文章 编号 : 1 6 7 2 — 6 4 1 3 ( 2 0 1 4 ) 0 5 — 0 0 1 1 — 0 3
作 者 简 介 :赵 洁 修 ( 1 9 8 8 一 ) ,女 ,河 北 秦 皇 岛人 , 在 读 硕 士 研 究 生 ,研 究 方 向 :数 控 仿 真 。
关 键 词 :S t e w a r t 动 感 平 台 ;有 限元 方 法 ; 体 感 模 拟 ;优 化 设 计
中 图 分 类 号 :T P 3 9 1 . 7: TH1 1 2 文 献 标 识 码 :A
O 引 言
பைடு நூலகம்
S t e wa r t 并 联 机构 由 2个 平 台和 可 伸 缩 旋 转 的 6 根 支 杆组 成 , 下 平 台 固定 , 上 平 台 与 模 拟 驾 驶 舱 相 连 接 。平 台在空 间具 有 6个 自由度 , 结 构灵 活 , 空 间 占用 面积小 , 并 且 具有 错误 并 行非 累加 的特点 ] , 故 其 广泛 地 应 用于 机器 人 结构及 许 多 大型 的模 拟器 中 。 目前 , S t e wa r t 平 台 有 实 心 平 台 和 中 间 镂 空 平 台 两 种结 构 。关 于 两种 结 构 的研 究 , 大 多应 用 传 统 力 学 方 法对 其 进 行 力 学 分 析 。但 是 , S t e wa r t 平 台 由于 其 空 间上 的灵 活 性 ] , 对 其进 行动 力 学分 析时 , 其 空 间几 何 方 面 的数据 量很 大 , 且 分 析 出来 的数 据对 实 际应 用 的价值 不 大 , 因而 , 简便 而 又实 际 的力 学分 析很 有 研究 价 值 。而 采用 有 限元 分 析 的创 新 点 在 于 , 使 用 有 限元 软 件代 替 传统 的 力学 分 析 方 法 , 可 以解 决 传 统 力 学 分 析 的数 据 量大 难 以计算 等 问题 。而且 , 不 同场 合 、 不 同 参 数 的平 台 , 只需 改变 模 型 的设 置 参数 [ 3 ] , 即可 快 速实 现 其力 学仿 真 。
含多级液压缸的大型液压举升系统时间最优轨迹规划
机床与液压
M ACHI NE OOL & HYDRAUL CS T I
F b2 2 e . 0l
Vo. 0 No 3 14 .
第4 o卷 第 3期
D I 1 .9 9ji n 10 38 .0 2 0 . 1 O : 0 3 6/. s.0 1— 8 12 1. 30 5 s
含多级液压 缸的大 型液压举升系统时问最优轨迹规划
田桂 ,谢建 ,陈永 宁 ,刘军捷。
( .第二炮兵工程学院,陕西西安 70 2 ; .第二炮兵驻长沙地 区军事代表室,湖南长沙 4 00 ; 1 10 5 2 125 3 .陆军航 空兵学院第一飞行训练团,四川宜宾 640 ) 400
Bsl efnt nW S dpe l — i ci a a ot t p n ̄ etr o r e i ytm B sdo h c a n os a s uha y al rs r pn u o , do a c y f i nl ss . ae nteat t gcnt i ,sc s d ui pes e o dv f t e ui rn hr c u
3 T eFr l h ri n ei n f r yA i inIstt,Y bnS h a 4 0 0,C ia . h i t i t a igR g sF g T n met m va o ntue ii i u n6 4 0 oA t i c hn )
Ab t a t A c lr t n d s o t ut , c u e y p e e s ie rc nr l t o sr c : c ee ai i n i i o c n y a s d b i c wiel a o t h d, w i h i a o td i e l g y r u i d v n n o me h c d p e n t a eh d a l r e s h r c i
Stewart平台力控制系统研发
i
和 B ×B i i=0 o
.
O.5 0
O
0O .5
一
令G f ,,广 力F [ F = 1 义 =F MM ) \ 则 G F M =
2
O1 .
.
0 1 .5
因。而采用力姿控制在柔性加工、 交会对接、 实验边界模拟等方面具有非常广泛的应用前景。该文介绍了在
Se a 平 台上进 行 的力控 制 系统 开发 , t r w t 实现 了力姿 控制 。
关键 词 : 自由度 ; 姿 ; 六 位 力控制 ; 力姿
中图分 类号 :H 3 文献 标 识码 : 文章 编号 :0045 (0 )200 -3 T 17 B 10 -88 2 1 1- 90 1 0
f、 ,
:
( Q- ( + △P 厶L )。
一
B ( 。 Q)・ 2一B P :
△ +
o
…
△+ ) L , 6
L o
●
=
Gl
●
:
:
过力传感器测得 , 且作动缸仅承受轴向力。 设广义力的 作用点为 Ⅳ, 它在参考系下 的坐标为 Ⅳ =[ x Ⅳ ] , Ⅳ z 。
度 Se at 联平 台的力姿 控制 。 t r并 w 2 力控 制 的数 学推 导
式中, i r s rnO01T P =[ o ii t ]为上铰点A在参考系 c s i i
. 中的坐标 , 已知量。 s 为 计算当前真实姿态 Q即为位姿 正解解算过程。 因此支撑力 矢量在参考系 中的坐
—
1 O O
.
J ● =G ● : ^
:
— —
1 0 2 0
液压驱动Stewart平台位姿控制仿真

[ ] 赵春章 , .可 植入式 微 型轴 流血 泵和 流场 的数值 模拟 4 等 [] J .机械工程学报 ,0 5 4 ( ) 9—2 . 2 0 ,1 7 :1 3 [] 张 宝字 , .应 用 C D对 人 工 血泵 流 场 进行 数 值仿 真 5 等 F [] J .中国生物医学工程学报 ,0 2 2 ( ) 4 —4 . 2 0 ,1 1 : 1 5
维普资讯
压 与 气动
20 0 6年 第 7
液 压 驱 动 Se a t 台位 姿控 制仿 真 tw r 平
赵 慧 张 尚盈 ,
P s o to n i ua in o t wa tPlto m rv n b d a l o e C n r l d S m l t fS e r a f r d i e y Hy r u i a o c
然而 , 无论 Se r平 台应 用 于 位 置控 制 , 飞 行 twa t 如 模拟 器 , 是应 用于 基 于 位置 内环 的 力控 制 或 动 力 学 还 控制 , 空 中交会 对 接仿 真 技术 、 配 机 械手 ,t r 如 装 Se t wa
平台的位姿控制都是最基本的保 障和前提 。对液压驱 动 Se rt平 台 位 姿 控 制 进 行 仿 真 与 分 析 研 究 , twa 是 Se a 平台实际应用的必要前提 , t r w t 具有重要的意义。
1 引言
铰 与液 压 缸 的 两 端 相 连 。通 过 六 个 液 压 缸 的 协 调 运 动 , 以在 空间分别 实 现三个 方 向的平 动 、 可 三个 方 向的 转 动 以及 各种 空 间运 动的复 合 。 运 动平 台的六 个上 铰点 位 于半 径为 r 的 圆周 上 , a Ai(l , ,)Ai( li=13 5 、 2 i 2=24 6 在 圆周 上 均 匀 分 布 ; ,,) 运 动平 台的 六个 下 铰 点 位 于半 径 为 r 圆周 上 ,i b的 Bl ( =135 、 .( i , ,)B2 i l 2=2,, ) 圆 周上 均 匀 分 布 。选 4 6在 取 体坐标 系 0 Z 的坐标 原点 为上 铰外 接 圆 圆心 , XY 并 固定 在上 平 台上 。将 静 坐 标 系 o y, X Z 固定 在 下平 台上 , 初 始位置 时 的 动 坐标 系和 静 坐标 系完 全重 并使 合。运动平台的初始高度 ( 上铰点与下铰点 间的垂直 距离 ) h 为 。坐标 轴 的方向 如 图 1 示 。 所 3 Se at 台位姿控 制 策略 t r平 w
电液驱动Stewart平台模型参数辨识方法

Stewart 平台单通道电液位置伺服系统结构和
阶次都比较明确[8],可建立具有明确结构和阶次的
灰箱状态空间闭环辨识模型。选取状态矢量为
⎧ ⎪
x1
=
y
⎪ ⎪ ⎨
x2 x3
= =
y y
(1)
⎪ ⎪
x4
=
Q
⎪⎩x5 = Q
式中 y 、 y 、 y 分别为液压缸位移、速度和加速
度; Q 、 Q 、 Q 分别为伺服阀流量、流量变化率
(1. 哈尔滨理工大学机械动力工程学院 哈尔滨 150080; 2. 哈尔滨工业大学机电工程学院 哈尔滨 150001)
摘要:电液驱动 Stewart 平台是一个多输入多输出复杂并联机构, 各通道间存在严重负载交联耦合。在确定平台各通道性能参 数时,按照简单的阀控缸系统进行理论计算或系统辨识,结果和实际情况相差极大,这严重影响平台控制系统的设计和系统 性能的提高。为了解决上述问题,设计一种基于 Levenberg-Marquardt 寻优算法的六维互不相关信号激励的 Stewart 平台闭环 辨识算法,并应用于电液驱动 Stewart 平台试验样机。试验结果表明该辨识算法准确地辨识出平台通道性能参数,取得较满 意的辨识结果。
第 46 卷第 3 期 2010 年 2 月
机械工程学报
JOURNAL OF MECHANICAL ENGINEERING
Vo l . 4 6 N o . 3
Feb.
2010
DOI:10.3901/JME.2010.03.029
电液驱动 Stewart 平台模型参数辨识方法*
吴 博 1 邵俊鹏 1 吴盛林 2 赵克定 2
电液驱动 Stewart 平台作为一种结构复杂的并 联机构,各通道间存在严重负载交联耦合[4],其数 学模型的性能参数与相同结构的阀控缸系统相比差 别很大,无法通过阀控缸系统理论计算或参数辨识 获得。而平台单通道精确数学模型对分析系统性能、 设计高精度控制器,提高系统轨迹跟踪精度起着极 其重要作用。对 Stewart 平台各通道进行参数辨识获 得系统实际模型是解决上述问题有效途径。
Stewart平台电液驱动机构设计(六自由度运动平台)
Stewart平台电液驱动机构设计摘要Stewart平台是六自由度并联机构的基础平台。
Stewart平台具有诸多优良特性,它在许多领域得到了广泛应用。
六自由度运动平台由于应用场合不同,采用不同的驱动方式。
目前,这种并联机构驱动方式主要包括电机驱动滚珠丝杠驱动方式、阀控液压缸驱动方式、气动人工肌肉驱动方式、电动液压混合执行器驱动方式、压电陶瓷驱动方式、电机驱动滑轮钢索驱动方式等。
阀控液压缸驱动方式的优点是刚度大、抗干扰能力强、功率-重量比和力矩-惯量比大、响应速度快、系统频带宽。
对该平台的驱动机构设计对于深刻理解并联机床和运动模拟器的机理具有重要的意义.本文的核心是研制一个满足实验要求Stewart平台的驱动机构,为了完成此机构的优化设计,本文主要从以下三个方面进行了理论分析。
对Stewart平台的运动学参数进行了理论分析和计算。
重点分析了动平台的位置、速度和加速度和支撑杆的相应参数之间的关系。
对Stewart平台的驱动机构进行了设计和校核,并对液压伺服系统进行了运动学仿真。
利用以上的理论分析和计算过程,本文针对设计目标的参数要求,给出了Stewart平台的驱动机构优化设计方案,并完成了平台的各个组件的设计。
关键词Stewart 平台;运动学;液压伺服系统The hydraulic drive mechanism of the Stewartplatform designAbstractThe Stewart Platform is the base of the six degree-of-freedom parallel mechanism. Stewart platform has many fine characteristics, which in many areas has been widely applied. Six degree-of-freedom campaign platform is used in different applications, so using different-driven approach. At present, the drive way of the parallel institutions contains Motor driven a ball screw-driven approach, valve controlled hydraulic cylinder-driven approach, pneumatic muscle-driven approach, hydraulic hybrid electric actuator-driven approach, piezoelectric ceramic-driven approach, Motor drive pulley cables-driven approach and so on. The advantage of Valve controlled hydraulic cylinder driven approach is high stiffness, Strong anti-interference capability, high Power - weight ratio and Torque –inertia ratio, Fast response, and wide system frequency band. It is critical to the consideration of parallel machine and motion simulation that theoretical research of the Stewart Platform is being carried.The core of the dissertation is to design a drive mechanism for Stewart Platform to meet a certain requirements. Three parts of research are being managed to approach the goal.To analysis and calculations the parameters of theoretical kinematics of the Stewart platform. Lay the emphases on the analysis of Moving platform position, speed acceleration and the relationship of corresponding parameters of the Supporting bar.Design and check the drive mechanism of the Stewart platform. And kinematics simulate for the hydraulic servo system.An optimization of Stewart platform design is put forward based on theabove four parts of work. The mechanical design of every component of the Stewart Platform is accomplished finally.Keywords Stewart Platform, kinematics, hydraulic servo system目录摘要 (I)Abstract (II)第1章绪论 (6)1.1 课题背景 (6)1.2 选题的目的和意义 (6)1.3 仿真用模拟器的组成 (7)1.4 Stewart平台的机械结构组成 (7)1.5 Stewart平台运动系统的关键技术及研究现状 (7)1.5.1 Stewart平台系统的运动特点 (7)1.5.2 Stewart平台运动系统的机构学理论 (8)1.5.3 Stewart平台运动系统的驱动方式 (9)1.5.4 六自由度运动系统的控制策略 (9)1.6 Stewart平台的特点及应用 (10)1.6.1 性能特点 (10)1.6.2 技术特点 (10)1.6.3 检测和控制特点 (11)1.6.4 六自由度并联平台的应用 (12)1.7 论文所要研究的主要内容 (13)第2章六自由度运动平台运动学研究 (14)2.1 引言 (14)2.2 六自由度运动平台结构 (14)2.3 六自由度运动平台运动学 (15)2.3.1 旋转变换矩阵 (15)2.3.2 六自由度运动平台位置和速度反解 (17)2.3.3六自由度运动平台加速度反解 (20)2.4本章小结 (21)第3章Stewart平台的机械机构结构设计 (22)3.1 液压缸的设计 (22)3.1.1 液压缸主要尺寸的确定 (23)3.1.2 液压缸结构设计中的几个问题 (25)3.2 上、下平台虎克铰的设计 (26)3.3 上、下平台台体的设计 (29)3.4 本章小结 (30)第4章CAD和UG简介 (31)4.1参数化设计思想 (31)4.2机械设计方法的发展趋势 (31)4.3 CAD技术发展概况 (32)4.4 UG简介 (35)4.5 运动仿真 (37)4.6 运动仿真的创建 (37)4.7 运动仿真中机构的运动形式 (38)4.8 动画文件的创建 (39)结论 (40)致谢 (41)参考文献 (42)附录 (43)第1章绪论1.1课题背景Stewart平台是通过六个作动器的协调伸缩来实现平台沿x、y、z向的平移和绕x、y、z轴的旋转运动(共6个自由度),以及这些自由度的复合运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
分别实现 3 个方向的平 图 1 St e w a r t 平台结构示意图
一般 St e w a r t 平台是以上铰圆圆心为控制点的 但在实际中 所要求的位姿控制点也有可能是其它 点 这时需要在反解之前进行控制点的变换 St e w a r t 平台的位姿控制结构如图 2 所示 设定的位姿经过控 制点变换和反解模块得到液压伺服系统活塞杆伸缩量 的设定值 液压伺服系统出力驱动 St e w a r t 平台动作 耦合了液压缸惯性力影响的 St e w a r t 平台的动态 由 液压缸内置磁滞传感器所测缸伸缩量来间接描述 4 l l 进入控 伸缩量设定值 A s与伸缩量测量值 A m 作差 制器 控制量为电液伺服阀的输入 电液伺服阀阀芯
* * *
考虑到: 0 : 2 3 y 0T 0: 0i 60 i e 解方程组 0 3 0 得 : ~ y 3T 0T 0+ 6y 0T 0 e i e i e a :i 5 T e ~ 15y 0 T 0 0T 0 y 7T ei e i e 0i : 23 i: 4 b T e ~ y 0T 0+ 0T 0 4T 10y e i e i e c i: 3 T e
* 138*
位移 x u调整进入液压缸两腔室的流量 腔室压力 因压力差而得驱动力 f a0
机床与液压
第 35 卷
进而形成两 得:
x向与其它五维稍有不同 始位置不在零位
因为有可能 x向初
即y 1 0 0 0 90 0 参考以上计算过程
2. 2
轨迹规划
并联机 器 人 运 动 平 台 的 运 动 总 是 从 初 始 位 置 0 零位闭环0 开始 除 x向外 其它各维皆从零状态 开始0 平台的控制应使得在到达接触点 t :T e 的那一 时刻 设定的接触条件全部得到满足 0 运动平台的 6 个自由度的轨迹控制 可以用解析 : T 方法实现0 使其满足 t : 0和t e时的边界条件 0 用 时间的 五 次 方 多 项 式 来 提 供 运 动 平 台 的 6 个 坐 标 00即 O 00 y 00即 O 00 y 00即 0x 0y y 10t gO p 20t gO p 30t O 0z 0x 1 0y 00 y 00即 R o t 00 y 00即 R o t gO p 40t 50t 00即 R o t 000 00 y 0z l 9 60t 0 t i 3 6 0 分别表示平台的除 x向的 0 0 : 2 用y i :T 其它五维中的某一个坐标0 同时 t 对接机 e时 ~ 构的特定接触条件 y 0 0 0 0 : 2 3 0 T 0 T 0 T y y i i e i e i e 0t 6 0 及其导数分别为 : 6 0 为已知0 y 00i : 2 3 i
动 3 个方向的转动以及各种空间运动的复合 O x y z 选取体坐标系 P 坐 p p p p在上平台上 标原 点 O 惯性坐标系 p 为上铰点的外接圆圆心 x y z O C O 的坐标原点 为下铰点的外接圆圆 g g g g g 心 坐标轴的方向如图 1 所示
2 St e w a r t 平台轨迹规划 2. 1 控制结构
~ 0 T0 + y0 0 0 1 3 Ty 6 y0 T0 -
050
一般来说
20s 0 T ~10 ~ e
3 3. 1
St e w a r t 平台轨迹规划仿真 仿真模型
根据 St e w a r t 平台运动学和动力学
561
以及液压
伺服控制基本知识 i a b/ Si m ui i nk 模型
71
0t 0: t+ t y 20 a t+ + 2 di 12 b 6c i i 10 其中: i : 2 3 6 ;t e 0 T e 根据边界条件 t : 0 时有 : y 000 : 0 i ~ 000 : 0i 60 y 0 : 2 3 i 000 : y 0 i 得到: 0 : 2 3 e f d i: 0i i: i: 所以有: 5 4 3 0t 0: ai t + b t + c t y i i i 20a t+ y 12b 6c 0t 0: t+ t i i : T : 根据 t 时的边界条件 e
2007 年 8 月 第 35 卷 第 8 期
机床与液压
m A C H I N ET O O LSH Y D R A U L I C S
A ug . 2007 V o i . 35 N o . 8
液压驱动 St e w a r t 平台轨迹规划
赵慧1 ! 张尚盈2
" 1.武汉科技大学机械自动化学院! 武汉 430081 % 2.华中科技大学数字制造及设备技术国家重点实验室! 武汉 430074 #
e i e 1 e 1 a1 : 5 T e ~ 15 y y 7T 0T 00y e i e 10T e 1 000 1 b 1 : 4 T e ~ 4T 10 y 0T 0+ 0y y e i e 10T e 1 00 0 1 c 1 : 3 T e f: y 0 0 0 1 1 d1 : e 0 1 :
: 2 3 0i
60 0 2 0
图3 六自由度并联机器人 m a t i a b/ Si m ui i nk 模型
模型在 m a t i a b/ Si m ui i nk 环 境 下 仿 真 时 库塔法 且用单任务模式
81
采用固
5 4 3 y 0T 0: ai T b T c T e+ e+ e i e i i 4 3 2 ~ 5ai 4b 3c 0T 0: T T T y e+ e+ e i e i i 3 2 0T 0: T T T y 12 b 6c 20 a i e+ i e i i e e+
定步长 0. 001s de 4 0R ung e K ut t a ; 算法使 用 o 0 龙格 : 2 3 0i 60 030 0 仿真结果如图 4
3. 2
所示
轨迹规划仿真
按照 2. 2 节所述轨迹规划方法 ; 仿真参数取 20s 轨迹规划结束时间取为 T e: ~ 0T 0 : -0. 0T 0 :1 0 0 / s ; x 03m/ s9 e e
0
引言
随着科技的发展以及人们对未知世 界 探 索 的 需 求 St e w a r t平 台 在 飞 行 模 拟 器 空 中 交 会 对 接 虚 拟 轴 机 床 力 -扭 矩 传 感 R V D 仿真技术 1 器 装配机械手等领域有广泛的应用 由于液压系统具有输出功率大 精度高 响应速 度快 调 速 范 围 大 低 速 特 性 好 等 特 点 可 满 足 St e w a r t 平台快速 高精度 大 负 载 和 结 构 紧 凑 的 要 求 因而液压驱动 St e w a r t 平台得到广泛的应用 2 在空中交会对接仿真技术中 为了能够在地面模 拟对接机构的真实工作过程 在空间对接模拟初始阶 段 需要对 St e w a r t 平台进行轨迹规划以使得对接机 构能满足接触初始条件 3
仿真结果验证了这种轨迹规划的有ቤተ መጻሕፍቲ ባይዱ性
关键词! 液压驱动
中图分类号! T P 242. 2
T r aj e c t or yP l an n i n g of s t e w ar t P l at f or mD r i ve nb yH yd r au l i c
1 2 Z H A OH ui Z H A N GSha ng y i ng 1. Sc ho o i o f m e c ha ni c a i A ut o m a t i o n Wuha nU ni v e r s i t yo f Sc i e nc ea nd T e c hno i o g y Wuha n 430081 2. N a t i o na i L e a di ngL a bf o r D i g i t a i m a nuf a c t ur ea nd E gui pm e nt T e c hno i o g y H ua z ho ngU ni v e r s i t yo f Sc i e nc ea nd T e c hno i o g y Wuha n 430074 C hi na
C hi na
A b s t r ac t St e w a r t pi a t f o r mdr i v e n by hy dr a ui i c ha s a m o r e a nd m o r e a ppi i c a t i o n be c a us e o f c ha r a c t e r i s t i c s o f hy dr a ui i c s y s t e ma nd s t r uc t ur ec a pa bi i i t yo f St e w a r t pi a t f o r m . A c c o r di ng t o St e w a r t pi a t f o r m c o m bi ne dw i t hi t s a ppi i c a t i o ni ns pa c e do c ki ng t he w ho i e c o nt r o i a nd s i m ui a t i o nm o de i o f s y s t e mw a s bui i ta nd t r a j e c t o r yo f St e w a r t pi a t f o r mw a s pi a nne da c c o r di ng t o t he ne e de di ni t i a i c o ndi t i o n i nt hebe g i nni ngo f do c ki ngs i m ui a t i o n.T r a j e c t o r ypi a nw a s v e r i f i e dt obee f f e c t i v ebys i m ui a t i o nr e s ui t s . K e yw or d s H y dr a ui i cdr i v i ng St e w a r t pi a t f o r m T r a j e c t o r ypi a nni ng