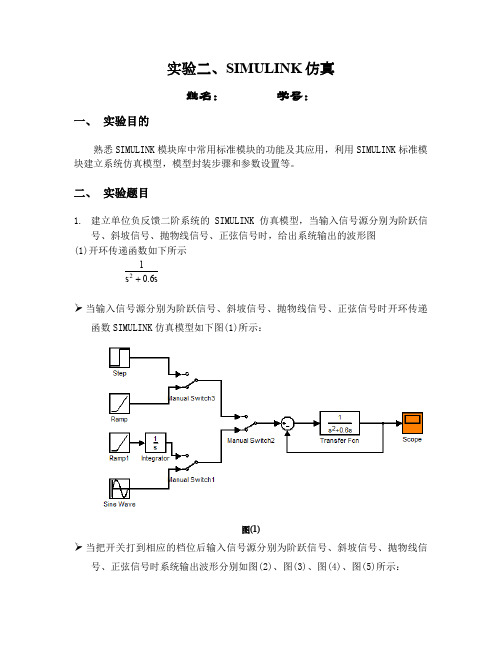
实验二 Simulink仿真环境
第2章Simulink仿真入门

第2章Simulink仿真⼊门第2章Simulink仿真⼊门Simulink是基于MATLAB的图形仿真设计环境。
它⽀持:1、线性和⾮线性系统;2、连续时间系统、离散时间系统;3、多进程的。
使⽤图形的系统模块对动态系统进⾏描述,并在此基础上采⽤MATLAB引擎对动态系统在时域进⾏求解。
MATLA计算引擎主要对系统微分⽅程和差分⽅程求解。
MATLAB主要求解的是数值解。
1) SIMULINK重要求解常微分⽅程等,求解这些问题的解主要⽤到数值计算⽅法,那么数值解和通常所说的解析解有什么不同?(什么是数值解)1. 解析解:所谓的解析解是⼀种包含分式、三⾓函数、指数、对数甚⾄⽆限级数等基本函数的解的形式。
⽤来求得解析解的⽅法称为解析法〈analytic techniques、analytic methods〉,解析法即是常见的微积分技巧,例如分离变量法等。
解析解为⼀封闭形式〈closed-form〉的函数,因此对任⼀独⽴变量,我们皆可将其带⼊解析函数求得正确的相依变量。
2. 数值解:当⽆法借由微积分技巧求得解析解时,这时便只能利⽤数值分析的⽅式来求得其数值解了。
数值⽅法变成了求解过程重要的媒介。
在数值分析的过程中,⾸先会将原⽅程式加以简化,以利后来的数值分析。
例如,会先将微分符号改为差分符号等。
然后再⽤传统的代数⽅法将原⽅程式改写成另⼀⽅便求解的形式。
这时的求解步骤就是将⼀独⽴变量带⼊,求得相依变量的近似解。
因此利⽤此⽅法所求得的相依变量为⼀个个分离的数值〈discrete values〉,不似解析解为⼀连续的分布,⽽且因为经过上述简化的动作,所以可以想见正确性将不如解析法来的好。
2.1simulink基本操作上机操作,主要包括:*模块的操作:选择(⼀个或多个)模块标签*信号线:模块间连接;线段的移动;节点的移动;分⽀信号线、删除信号线,信号线标签,信号线的折叠2.2 运⾏仿真及参数简介仿真前,必须对各种参数进⾏配置。
实验二、SIMULINK仿真(报告完整版)
由两种方法可以看出,运用函数编程编写代码进行试验时比较麻烦,调试比较
麻烦,但是运用 SIMULINK 模型来搭建系统,可视化比较好,而且在调试参数 时可以很简单的进行调整,即调试系统是比较简单。
SIULINK 模型与现实中的方框图的整体结构很相似,运用起来更加简单。因此在
进行控制模型调试过程最好运用 SIMULINK 方法。 3. 蹦极跳的数学模型为:
系统的 SIMULINK 模型如图(9)所示:
图(9)
x(t),x'(t)的曲线波形如图(10)所示:
图(10)
4. 建立单闭环调速系统的 SIMULINK 模型,并对 PID 控制器进行封装和对 P,I,D 参数进行设置。
单闭环调速系统的 SIMULINK 模型如图(11)所示,其中各个模块的参数可以再模
图(5)
(2)将(1)中的开环传递函数转换为状态空间模型。
实验代码:
[A,B,C,D]=tf2ss(1,[1 0.6 0])
执行结果:
A = -0.6000 1.0000 B = 1 0 C = 0 0
0 D = 0
1
2. 系统的微分方程为: x x(r ay ) y y (d bx) 设 r=1,d=0.5,a=0.1,b=0.02,x(0)=25,y(0)=2 1) 利用 MATLAB 所提供的函数,编写求解上述微分方程的 M 文件,求出 x(t),y(t);
mx mg b( x) x a1 x a2 x x
Kx x 0 b( x ) x0 0 其中 m 为物体的质量,g 为重力加速度,x 为物体的位置,第二项表示绳索的 弹力,K 为绳索的弹性系数,第三项和第四项表示空气的阻力。 设蹦极者的初始位置为 x(0)= -30, 起始速度为 x(0)'=0; 其余的参数为 a1=a2=1, m=70mg,g=10m/s2.试建立系统的 SIMULINK 模型,并给出 x(t),x'(t)的曲线波形
SIMULINK仿真实验
SimuLink 仿真二阶微分方程的求解专业:信息****** 1031020118****** 1031020124****** 1031020217指导老师:***日期:2012—12—25题目:二阶微分方程的求解一、实验目的1、熟悉Simulink 基本用法。
2、了解simulink 的一些模块的意义。
3、掌握模块的选取、复制、删除操作。
4、学会simulink 模块的连接以及模块参数的设置。
二、实验仪器1、计算机2、MATLAB 软件环境三、实验内容1、求解二阶微分方程x(t)0.4x(t)0.9x(t)0.7u(t)++=的方程解,其中u(t)是脉冲信号。
需要使用Simulink 求解x(t)。
2 、求解二阶微分方程x(t)0.2x(t)0.4x(t)0.2u(t)++=,其中u(t)是脉冲信号。
需要使用Simulink 求解x(t)。
3、求解二阶微分方程x(t)0.5x(t)0.8x(t)0.9u(t)++=的解x(t);其中初值为 ,并且 是一个余弦信号。
四、实验过程1、求解二阶微分方程x(t)0.4x(t)0.9x(t)0.7u(t)++=的方程解,其中u(t)是脉冲信号。
需要使用Simulink 求解x(t)。
1.1)用matlab 求解此二阶微分方程:在matlab 中输入程序: syms t y;u=sin(t); uu=0.7*u;y=dsolve(['D2y+0.4*Dy+0.9*y=',char(uu)]);程序运行结果:y =exp(-1/5*t)*sin(1/10*86^(1/2)*t)*C2+exp(-1/5*t)*cos(1/10*86^(1/2)*t)*C1-7/17*sin(t)-28/17*cos(t) 1.2)利用simulink 求解此二阶微分方程x(0)1x(0)3=⎧⎨=⎩u(t)cos(t)=1.21使用simulink创建微分方程:创建m文件:function Ts=yuejiewqqt=0:.1:20;y=heaviside(t);Ts=[t',y'];用Simulink做所得模块:1.22设置模块属性:设置模块pulse的模块属性:设置模块add的模块属性:1.23 运行simuliksimulink结果运行图:2、求解二阶微分方程x(t)0.2x(t)0.4x(t)0.2u(t)++=,其中u(t)是脉冲信号。
实验二 典型环节的模拟与仿真

1 t (1-12) T 特点: 输出量不但与输入量的积分成正比例, 当输入消失, 输出具有记忆功能。 具备比例环节与积分环节的共同优点。比例反映系统“快速性” ,而“积分”则 反映系统“过去”的所有变化。 4、惯性(T)环节。
其结构图如图 16-7 所示。 其传递函数为:
Ui(s)
K Ts+1
UO(s)
U 0 (S ) K = U i ( S ) TS + 1
(1-13)
图 16-7 惯性 ( T) 环节
惯性环节的模拟电路如图 16-8 所示,
R1
其传递函数为:
Ui(s)
R0
+
C
100k 100k
+
UO(s)
U 0 (S ) R /R = 1 0 U i ( S ) R1CS + 1
比较式(1-13)和(1-14)得
R1
C1
R2 C2 R3
Ui(s) R0
100k
+
100k
+
UO(s)
图 16-12
比例积分微分(PID)环节的模拟电路
其传递函数为
U 0 ( S ) R1 + R2 R C R C S +1 1 = + + 2 2⋅ 1 1 U i (S ) R0 R0 C1 S R0 C1 R3C 2 S + 1
U 0 ( s ) s 2 + 21s + 10 = U i ( s) s 2 + 10 s
在 MATLAB 的 simulink 环境下,作出如下结构图 16-13、并仿真。
图 16-13
各个环节仿真结构图
仿真结果如图 16-14 典型环节仿真结果图
实验二--基于simulink的2ASK数字调制与解调的仿真

实验二 基于simulink 的2ASK 有扰通信系统仿真一、实验目的1、熟悉2ASK 系统的调制、解调原理2、进一步熟悉MATLAB 环境下的Simulink 仿真平台3、提高学生分析问题和解决问题的能力二、实验原理1、2ASK 调制原理a)2ASK 的时间波形振幅键控是正弦载波的幅度随数字基带信号而变化的数字调制。
当数字基带信号为二进制时,则为二进制振幅键控。
设发送的二进制符号序列由0、1序列组成,发送0符号的概率为P ,发送1符号的概率为1-P ,且相互独立。
该二进制符号序列可表示为)()(S nn nT t g a t s -=∑其中,⎩⎨⎧=P -P 110发送概率为发送概率为n a T s 是二进制基带信号时间间隔,g(t)是持续时间为T s 的矩形脉冲:⎩⎨⎧≤≤=其他001)(s T t t g则二进制振幅键控信号可表示为t nT t g a t t s t s c s n n c ASK ωωcos )(cos )()(2⎥⎦⎤⎢⎣⎡-==∑ 典型波形如图1-1所示图1-1 典型2ASK 波形由图1-1可以看出,2ASK 信号的时间波形e 2ASK (t)随二进制基带信号s(t)通断变化,所以又称为通断键控信号(OOK 信号)。
b)2ASK 信号的功率谱密度由于二进制的随机脉冲序列是一个随机过程,所以调制后的二进制数字信号也是一个随机过程,因此在频率域中只能用功率谱密度表示。
2ASK 信号功率谱密度的特点如下:(1)由连续谱和离散谱两部分构成,连续谱由调制信号g(t)经线性调制后决定,离散谱由载波分量决定;(2)已调信号波形的带宽是基带脉冲波形带宽的2倍。
2ASK 信号功率谱密度推导:设调制信号s(t)为单极性不归零码,码元间隔为T s ,高电平设为A ,低电平为0,则)(t s 的功率谱)(f P s 为 )(4)(4)(222f A fT Sa T A f P s s s δπ+= 已调信号为t nT t g a t t s t s c S n n c ASK ωωcos )(cos )()(2⎥⎦⎤⎢⎣⎡-==∑,其功率谱为[])()(16)()(sin )()(sin 16)(2222c c s c s c s c s c s e f f f f A T f f T f f T f f T f f T A f P -+++⎥⎥⎦⎤⎢⎢⎣⎡--+++=δδππππ图1-2 2ASK 信号的功率谱密度示意图图中,sb T f 1=,为调制信号s(t)的带宽,数值上也等于码元速率。
MATLABSimulink和控制系统仿真实验报告
MATLAB/Simulink与控制系统仿真实验报告姓名:喻彬彬学号:K031541725实验1、MATLAB/Simulink 仿真基础及控制系统模型的建立一、实验目的1、掌握MATLAB/Simulink 仿真的基本知识;2、熟练应用MATLAB 软件建立控制系统模型。
二、实验设备电脑一台;MATLAB 仿真软件一个三、实验内容1、熟悉MATLAB/Smulink 仿真软件。
2、一个单位负反馈二阶系统,其开环传递函数为210()3G s s s =+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
3、某控制系统的传递函数为()()()1()Y s G s X s G s =+,其中250()23s G s s s+=+。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
4、一闭环系统结构如图所示,其中系统前向通道的传递函数为320.520()0.11220s G s s s s s+=+++,而且前向通道有一个[-0.2,0.5]的限幅环节,图中用N 表示,反馈通道的增益为1.5,系统为负反馈,阶跃输入经1.5倍的增益作用到系统。
用Simulink 建立该控制系统模型,用示波器观察模型的阶跃响应曲线,并将阶跃响应曲线导入到MATLAB 的工作空间中,在命令窗口绘制该模型的阶跃响应曲线。
四、实验报告要求实验报告撰写应包括实验名称、实验内容、实验要求、实验步骤、实验结果及分析和实验体会。
五、实验思考题总结仿真模型构建及调试过程中的心得体会。
题1、(1)利用Simulink的Library窗口中的【File】→【New】,打开一个新的模型窗口。
(2)分别从信号源库(Sourse)、输出方式库(Sink)、数学运算库(Math)、连续系统库(Continuous)中,用鼠标把阶跃信号发生器(Step)、示波器(Scope)、传递函数(Transfern Fcn)和相加器(Sum)4个标准功能模块选中,并将其拖至模型窗口。
实验二典型系统的时域响应分析实验仿真报告答案分析解析

实验二典型系统的时域响应分析实验仿真报告答案分析解析Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】实验二典型系统的时域响应分析1. 实验目的1) 通过用MATLAB 及SIMULINK 对控制系统的时域分析有感性认识。
2) 明确对于一阶系统,单位阶跃信号、单位斜坡信号以及单位脉冲信号的响应曲线图。
3) 对于二阶系统阶跃信号的响应曲线图以及不同阻尼比、不同自然角频率取值范围的二阶系统曲线比较图。
4) 利用MATLAB 软件来绘制高阶控制系统的零极点分布图,判断此系统是否有主导极点,能否用低阶系统来近似,并将高阶系统与低阶系统的阶跃响应特性进行比较5)编制简单的M文件程序。
2. 实验仪器PC计算机一台,MATLAB软件1套3. 实验内容1)一阶系统的响应(1) 一阶系统的单位阶跃响应在SIMULINK 环境下搭建图1的模型,进行仿真,得出仿真曲线图。
理论分析:C(s)=1/[s+1)]由拉氏反变换得h(t)=1-e^(-t/ (t>=0)由此得知,图形是一条单调上升的指数曲线,与理论分析相符。
(2) 一阶系统的单位斜坡响应在SIMULINK 环境下搭建图2的模型,将示波器横轴终值修改为12进行仿真,得出仿真曲线图。
理论分析:C (s )=1/[s^2(4s+1)]可求的一阶系统的单位斜坡响应为c(t)=(t-4)+4e^(-t/4)e(t)=r(t)-c(t)=4-4e^(-t/4) 当t=0时,e(t)=0,当趋于无穷时,误差趋于常值4.3) 一阶系统的单位脉冲响应在medit 环境下,编译一个.m 文件,利用impulse ()函数可以得出仿真曲线图。
此处注意分析在SIMULINK 环境中可否得到该曲线图。
理论分析:C (s )=5/+2)=(5/2)/+1)可求的g(t)=^(-t/,是一个单调递减的函数。
两种环境下得到的曲线图不一致。
2)二阶系统的单位阶跃响应二阶系统的闭环传递函数标准形式为 其阶跃响应可以分以下情况解出①当0=ζ时,系统阶跃响应为 )cos(1)(t t c n ω-=②当10<<ζ时,系统阶跃响应为 )sin(111)(2θωζζω+--=-t e t c d tn其中ζζθ/121-=-tg ,21ζωω-=n d③当1=ζ时,系统阶跃响应为 t n n e t t c ωω-+-=)1(1)(④当1>ζ时,系统阶跃响应为 ⎪⎪⎭⎫ ⎝⎛---=21221121)(λλζωλλt t ne e t c 其中121---=ζζλ,122-+-=ζζλ (1)自然角频率1=n ω选取不同阻尼比=ζ0,,,,,,,用MATLAB 得到二阶系统阶跃响应曲线。
通信系统的Simulink仿真

实验三通信系统的Simulink仿真一、实验目的1、提高独立学习的能力;2、培养发现问题、解决问题和分析问题的能力;,3、学习用Matlab simulink实现通信系统的仿真的使用;4、掌握数字载波通信系统的基本原理。
二、实验原理1. Simulink简介Simulink是Matlab中的一个建立系统方框图和基于方框图的系统仿真环境,是一个对动态系统进行建模、仿真和仿真结果可视化分析的软件包。
Simulink采用基于时间流的链路级仿真方法,将仿真系统建模与工程中通用的方框图设计方法统一起来,可以更加方便地对系统进行可视化建模,并且仿真结果可以近乎“实时”地通过可视化模块,如示波器模块、频谱仪模块以及数据输入输出模块等显示出来,使系统设计、仿真调试和模型检验工作大为简便。
SIMULINK 模型有以下几层含义:(1)在视觉上表现为直观的方框图;(2)在文件上则是扩展名为mdl 的ASCII代码;(3)在数学上表现为一组微分方程或差分方程;(4)在行为上则模拟了实际系统的动态特性。
SIMULINK 模型通常包含三种“组件”:(1)信源( Sources):可以是常数、时钟、白噪声、正弦波、阶梯波、扫频信号、脉冲生成器、随机数产生器等信号源;(2)系统( System):即指被研究系统的SIMULINK 方框图;(3)信宿( Sink):可以是示波器、图形记录仪等。
2. 通信常用模块库及模块编辑功能简介通信中常用的MATLAB工具箱有:Simulink 库,Communications Blockset(通信模块集),DSP Blockset (数字信号处理模块集)。
其中对单个模块的主要编辑功能如下:1) 添加模块:模块库中的模块可以直接用鼠标进行拖曳(选中模块,按住鼠标左键不放)而放到模型窗口中进行处理;2) 选取模块;3) 复制与删除模块;4) 模块名的处理模块命名:先用鼠标在需要更改的名称上单击一下,然后直接更改即可。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验二 Simulink仿真环境Simulink是面向框图的仿真软一个动态系统建模、仿真和综合分析的集成环境。
在该环境中,无需大量书写程序,而只需要通过简单直观的鼠标操作,就可构造出复杂的系统。
Simulink 具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优Simulink。
Simulink是MATLAB中的一种可视化仿真工具,是一种基于MATLAB的框图设计环境,是实现动态系统建模、仿真和分析的一个软件包,被广泛应用Simulink可以用连续采样时间、离散采样时间或两种混合的采样时间进行建模,它也支持多速率系统,也就是系统中的不同部分具有不同的采样速率。
为了创建动态系统模型,Simulink提供了一个建立模型方块图的图形用户接口捷、直接明了的方式,而且用户可以立即看到系统的仿真结果。
系统,Simulink提供了交互式图形化环境和可定制模块库来对其进行设计、仿真、执行和测试。
2.1演示一个Simulink的简单程序【例2.1】创建一个正弦信号的仿真模型。
步骤如下:(1) 在MATLAB的命令窗口运行simulink命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser) 窗口,如图2.1所示。
(2) 单击工具栏上的图标或选择菜单“File ”——“New ”——“Model ”,新建一个名为“untitled ”的空白模型窗口。
(3) 在上图的右侧子模块窗口中,单击“Source ”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink 下的Source 子模块库,便可看到各种输入源模块。
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave ”(正弦信号),将其拖放到的空白模型窗口“untitled ”,则“Sine Wave ”模块就被添加到untitled 窗口;也可以用鼠标选中“Sine Wave ”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave ”模块添加到untitled 窗口,如图2.2所示。
图2.1 Simulink 界面(5) 用同样的方法打开接收模块库“Sinks ”,选择其中的“Scope ”模块(示波器)拖放到“untitled ”窗口中。
(6) 在“untitled ”窗口中,用鼠标指向“Sine Wave ”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope ”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图2.3所示。
(2) 开始仿真,单击“untitled”模型窗口中“开始仿真”图标,或者选择菜单“Simulink ”——“Start ”,则仿真开始。
双击“Scope ”模块出现示波器显示屏,可以看到黄色的正弦波形。
如图2.4所示。
(8) 保存模型,单击工具栏的图标,将该模型保存为“Ex0201.mdl ”文件。
图2.3 Simulink 模型窗口图2.4 示波器窗口图2.2 Simulink 界面2.2 Simulink的文件操作和模型窗口2.2.1 Simulink的文件操作1. 新建文件新建仿真模型文件有几种操作:▪在MATLAB的命令窗口选择菜单“File”→“New”→“Model”。
▪在图2.1的Simulink模块库浏览器窗口选择菜单“File”→“New”→“Model”,或者单击工具栏的图标。
▪在图 2.3的Simulink模型窗口选择菜单“File”→“New”→“Model”,或者单击工具栏的图标。
2. 打开文件打开仿真模型文件有几种操作:▪在MATLAB的命令窗口输入不加扩展名的文件名,该文件必须在当前搜索路径中,例如输入“Ex0201”。
▪在MATLAB的命令窗口选择菜单“File”→Open…”或者单击工具栏的图标打开文件。
▪在图2.1的Simulink模块库浏览器窗口选择菜单“File”→“Open…”或者单击工具栏的图标打开“.mdl”文件。
▪在图2.3的Simulink模型窗口中选择菜单“File”→“Open…”或者单击工具栏的图标打开文件。
2.2.2 Simulink的模型窗口模型窗口由菜单、工具栏、模型浏览器窗口、模型框图窗口以及状态栏组成。
1. 状态栏2. 工具栏模型窗口工具栏如图2.6所示。
3. 菜单Simulink 的模型窗口的常用菜单如表2.1所示。
表2.1模型窗口常用菜单表图2.5 双窗口模型窗口2.3 模型的创建2.3.1模块的操作1. 对象的选定▪选定单个对象选定对象只要在对象上单击鼠标,被选定的对象的四角处会出现小黑块编辑框。
▪选定多个对象如果选定多个对象,可以按下Shift键,然后再单击所需选定的模块;或者用鼠标拉出矩形虚线框,将所有待选模块框在其中,则矩形框中所有的对象均被选中,如图2.2所示。
图2.2 选定多个对象▪选定所有对象如果要选定所有对象,可以选择菜单“Edit”→“Select all”。
2. 模块的复制(1) 不同模型窗口(包括模型库窗口)之间的模块复制▪选定模块,用鼠标将其拖到另一模型窗口。
▪选定模块,使用菜单的“Copy”和“Paste”命令。
▪选定模块,使用工具栏的“Copy”和“Paste”按钮。
(2) 在同一模型窗口内的复制模块(如图2.8所示)▪选定模块,按下鼠标右键,拖动模块到合适的地方,释放鼠标。
▪选定模块,按住Ctrl键,再用鼠标拖动对象到合适的地方,释放鼠标。
▪使用菜单和工具栏中的“Copy”和“Paste”按钮。
图2.8 在同一模型窗口复制对象3. 模块的移动▪在同一模型窗口移动模块选定需要移动模块,用鼠标将模块拖到合适的地方。
▪在不同模型窗之间移动模块在不同模型窗之间移动模块,在用鼠标移动的同时按下Shift键。
当模块移动时,与之相连的连线也随之移动。
4. 模块的删除要删除模块,应选定待删除模块,按Delete键;或者用菜单“Edit”→“Clear”或“Cut”;或者用工具栏的“Cut”按钮。
5. 改变模块大小选定需要改变大小的模块,出现小黑块编辑框后,用鼠标拖动编辑框,可以实现放大或缩小。
6. 模块的翻转▪模块翻转180度选定模块,选择菜单“Format”→“Flip Block”可以将模块旋转180度,如同2.9中间为翻转180度示波器模块。
▪模块翻转90度选定模块,选择菜单“Format”→“Rotate Block”可以将模块旋转90图2.9 翻转模块度,如图 2.9右边示波器所示。
如果一次翻转不能达到要求,可以多次翻转来实现。
2. 模块名的编辑▪修改模块名单击模块下面或旁边的模块名,出现虚线编辑框就可对模块名进行修改。
▪模块名字体设置选定模块,选择菜单“Format”→“Font”,打开字体对话框设置字体。
▪模块名的显示和隐藏选定模块,选择菜单“Format”→“Hide /Show name”,可以隐藏或显示模块名。
▪模块名的翻转选定模块,选择菜单“Format”→“Flip name”,可以翻转模块名。
2.3.2信号线的操作1. 模块间连线先将光标指向一个模块的输出端,待光标变为十字符后,按下鼠标键并拖动,直到另一模块的输入端。
2. 信号线的分支和折曲(1) 分支的产生将光标指向信号线的分支点上,按鼠标右键,光标变为十字符,拖动鼠标直到分支线的终点,释放鼠标;或者按住Ctrl键,同时按下鼠标左键拖动鼠标到分支线的终点,如图2.10所示。
图2.10 信号线的分支(2) 信号线的折线选中已存在的信号线,将光标指向折点处,按住Shift键,同时按下鼠标左键,当光标变成小圆圈时,用鼠标拖动小圆圈将折点拉至合适处,释放鼠标,如图2.11所示。
图2.11 信号线的折线3. 信号线文本注释(label)▪添加文本注释双击需要添加文本注释的信号线,则出现一个空的文字填写框,在其中输入文本。
▪修改文本注释单击需要修改的文本注释,出现虚线编辑框即可修改文本。
▪移动文本注释单击标识,出现编辑框后,就可以移动编辑框。
▪复制文本注释单击需要复制的文本注释,按下Ctrl键同时移动文本注释,或者用菜单和工具栏的复制操作。
4. 在信号线中插入模块如果模块只有一个输入端口和一个输出端口,则该模块可以直接被插入到一条信号线中。
2.3.3给模型添加文本注释(1) 添加模型的文本注释在需要当作注释区的中心位置,双击鼠标左键,就会出现编辑框,在编辑框中就可以输入文字注释。
(2) 注释的移动在注释文字处单击鼠标左键,当出现文本编辑框后,用鼠标就可以拖动该文本编辑框。
2.4 Simulink的基本模块2.4.1基本模块Simulink的基本模块包括9个子模块库。
1.输入信号源模块库(Sources)输入信号源模块是用来向模型提供输入信号。
常用的输入信号源模块源如表2.2所示。
表2.2 常用的输入信号源模块表2. 接收模块库(Sinks)接收模块是用来接收模块信号的,常用的接收模块如表2.3所示。
表2.3 常用的接收模块表3. 连续系统模块库(Continuous)连续系统模块是构成连续系统的环节,常用的连续系统模块如表2.4所示。
表2.4 常用的连续系统模块表4. 离散系统模块库(Discrete)离散系统模块是用来构成离散系统的环节,常用的离散系统模块如表2.5所示。
表2.5 常用的离散系统模块表2.4.2常用模块的参数和属性设置1. 模块参数设置(1) 正弦信号源(Sine Wave)双击正弦信号源模块,会出现如图2.13所示的参数设置对话框。
图2.13的上部分为参数说明,仔细阅读可以帮助用户设置参数。
Sine type 为正弦类型,包括Time-based 和Sample-based ;Amplitude 为正弦幅值;Bias 为幅值偏移值;Frequency 为正弦频率;Phrase 为初始相角;Sample time 为采样时间。
(2) 阶跃信号源(Step)阶跃信号模块是输入信号源,其模块参数对话框如图2.14所示。
其中:Step time 为阶跃信号的变化时刻,initial value 为初始值,Final value 为终止值,Sample time 为采样时间。
(3) 从工作空间获取数据(From workspace)从工作空间获取数据模块的输入信号源为工作空间。
【例2.2】在工作空间计算变量t 和y ,将其运算的结果作为系统的输入。
t=0:0.1:10;y=sin(t);图2.14 阶跃信号模块的参数图2.13 模块的参数设置t=t'; y=y';然后将“From Workspace ”模块的参数设置对话框打开,如图 2.15(a)所示,在“Data ”栏填写“[t,y]”,单击“OK ”按钮完成。