实验报告五SIMULINK仿真实验
matlab中Simulink 的仿真实验报告
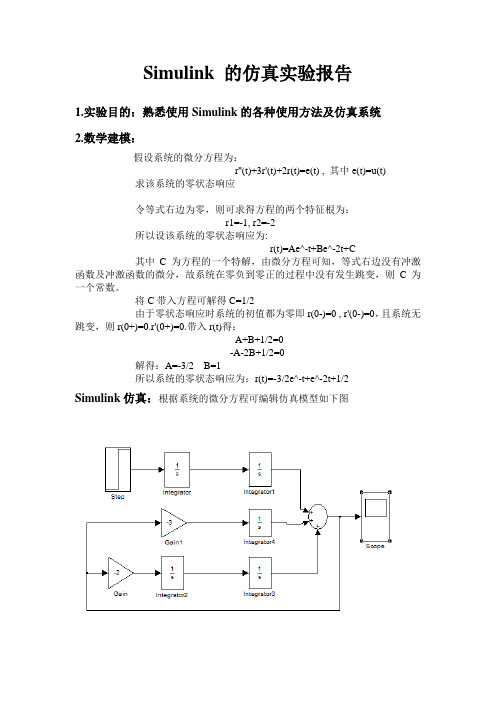
Simulink 的仿真实验报告1.实验目的:熟悉使用Simulink的各种使用方法及仿真系统2.数学建模:假设系统的微分方程为:r''(t)+3r'(t)+2r(t)=e(t) , 其中e(t)=u(t)求该系统的零状态响应令等式右边为零,则可求得方程的两个特征根为:r1=-1, r2=-2所以设该系统的零状态响应为:r(t)=Ae^-t+Be^-2t+C其中C为方程的一个特解,由微分方程可知,等式右边没有冲激函数及冲激函数的微分,故系统在零负到零正的过程中没有发生跳变,则C为一个常数。
将C带入方程可解得C=1/2由于零状态响应时系统的初值都为零即r(0-)=0 , r'(0-)=0,且系统无跳变,则r(0+)=0.r'(0+)=0.带入r(t)得:A+B+1/2=0-A-2B+1/2=0解得:A=-3/2 B=1所以系统的零状态响应为:r(t)=-3/2e^-t+e^-2t+1/2Simulink仿真:根据系统的微分方程可编辑仿真模型如下图打开开始按键,可以得到波形图:验证仿真结果:由前面得到的系统零状态响应结果:r(t)=-3/2e^-t+e^-2t+1/2可编辑仿真模型:>> t=(0:0.1:10);>> plot(t,((-3)/2)*exp((-1)*t)+exp((-2)*t)+1/2)实验结论:Simulink仿真结果和函数仿真结果基本一致,所以simulink仿真是正确的。
实验心得:1.此实验是利用matlab对一个微分方程进行建模求解,既要求我们掌握对微分方程的求解,又要求掌握用matlab对微分方程进行建模,所以要求我们对软件得熟悉。
2.信号与系统的实验主要是用matlab分析或验证书上的东西,前提当然是学好书本上的知识,再学好matlab这个软件。
3.用simulink仿真的时候,对函数用积分器较好,不知为什么用微分器做不出来,报错显示不出图形。
Simulink实验报告
实验一:AM 信号的调制与解调实验目的:1.了解模拟通信系统的仿真原理。
2.AM 信号是如何进行调制与解调的。
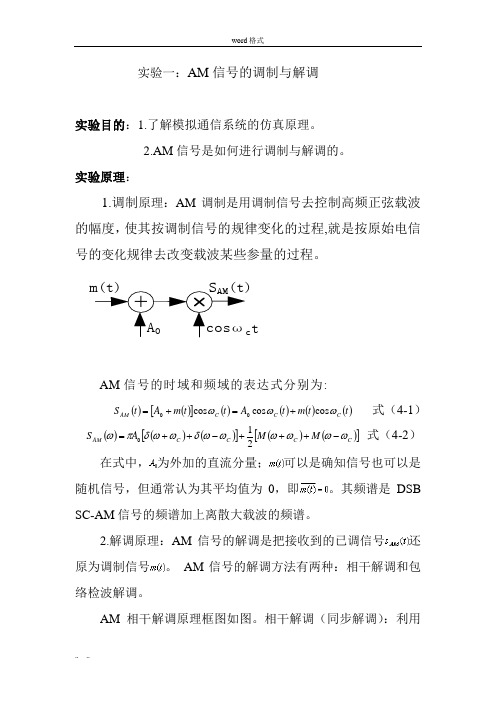
实验原理:1.调制原理:AM 调制是用调制信号去控制高频正弦载波的幅度,使其按调制信号的规律变化的过程,就是按原始电信号的变化规律去改变载波某些参量的过程。
+m(t)S AM (t)A 0cos ωc tAM 信号的时域和频域的表达式分别为:()()[]()()()()t t m t A t t m A t S C C C AM ωωωcos cos cos 00+=+=式(4-1) ()()()[]()()[]C C C C AM M M A S ωωωωωωδωωδπω-+++-++=210 式(4-2)在式中,为外加的直流分量;可以是确知信号也可以是随机信号,但通常认为其平均值为0,即。
其频谱是DSBSC-AM 信号的频谱加上离散大载波的频谱。
2.解调原理:AM 信号的解调是把接收到的已调信号还原为调制信号。
AM 信号的解调方法有两种:相干解调和包络检波解调。
AM 相干解调原理框图如图。
相干解调(同步解调):利用相干载波(频率和相位都与原载波相同的恢复载波)进行的解调,相干解调的关键在于必须产生一个与调制器同频同相位的载波。
如果同频同相位的条件得不到满足,则会破坏原始信号的恢复。
相干载波的提取:(1)导频法:在发送端加上一离散的载频分量,即导频,在接收端用窄带滤波器提取出来作为相干载波,导频的功率要求比调制信号的功率小;(2)不需导频的方法:平方环法、COSTAS环法。
LPF m0(t)S AM(t)cosωc tAM信号波形的包络与输入基带信号成正比,故可以用包络检波的方法恢复原始调制信号。
包络检波器一般由半波或全波整流器和低通滤波器组成:(1)整流:只保留信号中幅度大于0的部分。
(2)低通滤波器:过滤出基带信号;(3)隔直流电容:过滤掉直流分量。
实验内容:1.AM相干解调框图。
仿真实验报告

仿真实验报告
实验目的:通过进行基于仿真实验研究,探讨某种设备的性能优化方案。
实验环境:
- 仿真软件:MATLAB
- 建模软件:Simulink
实验流程:
1. 设备测试:通过实际测试记录该设备的真实性能指标。
2. 设备建模:基于测试结果建立该设备的仿真模型。
3. 性能优化:通过修改设备的参数、控制策略等途径,对设备模型进行优化。
4. 实验验证:通过对优化后的设备模型进行仿真,验证其实际性能指标是否有所提升。
实验步骤:
1. 设备测试
本实验选取了一款蓄电池供电的小型无线电设备作为研究对象。
通过对该设备进行电量、温度、功率等指标的测试,记录了其最
大输出功率、最大使用时间等参数。
2. 设备建模
基于以上测试结果,我们使用Simulink建立了该设备的仿真模型。
该模型涵盖了该设备的电路结构、能源储存系统以及控制策
略等方面,并能够准确模拟该设备的工作过程。
3. 性能优化
通过对设备模型进行调整,我们尝试优化了该设备的性能。
具
体优化措施主要包括:增加电量储备系统容量、优化功率调节策
略等方面。
4. 实验验证
根据优化后的设备模型,我们进行了全面的仿真实验。
实验结
果表明,优化后的设备在工作时间、输出功率等方面都有了显著
提升。
结论
通过本次仿真实验,我们成功地探究了一种设备的性能优化方案,并在实际仿真中验证了其有效性。
这种基于仿真实验的研究方法,为设备性能优化提供了一种全新的思路和手段。
simulink仿真实验报告
simulink仿真实验报告Simulink仿真实验报告一、引言Simulink是一种基于模型的设计和仿真工具,广泛应用于各领域的工程设计和研究中。
本次实验将利用Simulink进行系统仿真实验,通过搭建模型、参数调整、仿真运行等过程,验证系统设计的正确性和有效性。
二、实验目的本实验旨在帮助学生掌握Simulink的基本使用方法,了解系统仿真的过程和注意事项。
通过本实验,学生将能够:1. 熟悉Simulink的界面和基本操作;2. 理解和掌握模型构建的基本原理和方法;3. 学会调整系统参数、运行仿真和分析仿真结果。
三、实验内容本实验分为以下几个步骤:1. 绘制系统模型:根据实验要求,利用Simulink绘制出所需的系统模型,包括输入、输出、控制器、传感器等。
2. 参数设置:针对所绘制的系统模型,根据实验要求设置系统的参数,例如增益、阻尼系数等。
3. 仿真运行:通过Simulink的仿真功能,对所构建的系统模型进行仿真运行。
4. 仿真结果分析:根据仿真结果,分析系统的动态性能、稳态性能等指标,并与理论值进行对比。
四、实验结果与分析根据实验要求,我们绘制了一个负反馈控制系统的模型,并设置了相应的参数。
通过Simulink的仿真功能,我们进行了仿真运行,并获得了仿真结果。
仿真结果显示,系统经过调整参数后,得到了较好的控制效果。
输出信号的稳态误差较小,并且在过渡过程中没有发生明显的振荡或超调现象。
通过与理论值进行对比,我们验证了系统的稳态稳定性和动态响应性能较为理想。
五、实验总结通过本次实验,我们掌握了使用Simulink进行系统仿真的基本方法和技巧。
了解了系统模型构建的基本原理,并学会了参数调整和仿真结果分析的方法。
这对于我们今后的工程设计和研究具有重要的意义。
六、参考文献1. 《Simulink使用手册》,XXX出版社,20XX年。
2. XXX,XXX,XXX等.《系统仿真与建模实践教程》. 北京:XXX出版社,20XX年。
SIMULINK仿真实验
SimuLink 仿真二阶微分方程的求解专业:信息****** 1031020118****** 1031020124****** 1031020217指导老师:***日期:2012—12—25题目:二阶微分方程的求解一、实验目的1、熟悉Simulink 基本用法。
2、了解simulink 的一些模块的意义。
3、掌握模块的选取、复制、删除操作。
4、学会simulink 模块的连接以及模块参数的设置。
二、实验仪器1、计算机2、MATLAB 软件环境三、实验内容1、求解二阶微分方程x(t)0.4x(t)0.9x(t)0.7u(t)++=的方程解,其中u(t)是脉冲信号。
需要使用Simulink 求解x(t)。
2 、求解二阶微分方程x(t)0.2x(t)0.4x(t)0.2u(t)++=,其中u(t)是脉冲信号。
需要使用Simulink 求解x(t)。
3、求解二阶微分方程x(t)0.5x(t)0.8x(t)0.9u(t)++=的解x(t);其中初值为 ,并且 是一个余弦信号。
四、实验过程1、求解二阶微分方程x(t)0.4x(t)0.9x(t)0.7u(t)++=的方程解,其中u(t)是脉冲信号。
需要使用Simulink 求解x(t)。
1.1)用matlab 求解此二阶微分方程:在matlab 中输入程序: syms t y;u=sin(t); uu=0.7*u;y=dsolve(['D2y+0.4*Dy+0.9*y=',char(uu)]);程序运行结果:y =exp(-1/5*t)*sin(1/10*86^(1/2)*t)*C2+exp(-1/5*t)*cos(1/10*86^(1/2)*t)*C1-7/17*sin(t)-28/17*cos(t) 1.2)利用simulink 求解此二阶微分方程x(0)1x(0)3=⎧⎨=⎩u(t)cos(t)=1.21使用simulink创建微分方程:创建m文件:function Ts=yuejiewqqt=0:.1:20;y=heaviside(t);Ts=[t',y'];用Simulink做所得模块:1.22设置模块属性:设置模块pulse的模块属性:设置模块add的模块属性:1.23 运行simuliksimulink结果运行图:2、求解二阶微分方程x(t)0.2x(t)0.4x(t)0.2u(t)++=,其中u(t)是脉冲信号。
simulink仿真实验报告

simulink仿真实验报告一、实验目的本次实验的主要目的是通过使用Simulink软件来进行仿真实验,掌握Simulink仿真工具的基本使用方法,并且了解如何应用Simulink软件来进行系统建模和仿真分析。
二、实验内容1. Simulink软件的基本介绍2. Simulink仿真工具的使用方法3. Simulink模型建立与参数设置4. Simulink仿真结果分析三、实验步骤及方法1. Simulink软件的基本介绍Simulink是一种基于模块化编程思想的图形化编程工具,可以用于建立各种系统模型,并且进行系统仿真分析。
在Simulink中,用户可以通过拖动不同类型的模块来搭建自己所需要的系统模型,并且可以对这些模块进行参数设置和连接操作。
2. Simulink仿真工具的使用方法首先,在打开Simulink软件后,可以看到左侧有一系列不同类型的模块,包括数学运算、信号处理、控制系统等。
用户可以根据自己需要选择相应类型的模块,并将其拖入到工作区域中。
然后,用户需要对这些模块进行参数设置和连接操作,以构建出完整的系统模型。
最后,在完成了系统模型的构建后,用户可以进行仿真分析,并且观察系统的运行情况和输出结果。
3. Simulink模型建立与参数设置在本次实验中,我们主要是以一个简单的控制系统为例来进行仿真分析。
首先,我们需要将数学运算模块、控制器模块和被控对象模块拖入到工作区域中,并将它们进行连接。
然后,我们需要对这些模块进行参数设置,以确定各个模块的输入和输出关系。
最后,在完成了系统模型的构建后,我们可以进行仿真分析,并观察系统的运行情况和输出结果。
4. Simulink仿真结果分析在完成了Simulink仿真实验之后,我们可以得到一系列仿真结果数据,并且可以通过Simulink软件来对这些数据进行进一步的分析和处理。
例如,在本次实验中,我们可以使用Simulink软件来绘制出控制系统的输入信号、输出信号和误差曲线等图形,并且可以通过这些图形来判断系统是否满足预期要求。
模糊控制实例及simulink仿真实验报告
模糊控制实例及simulink仿真实验报告
一、背景介绍
模糊控制是一种基于模糊逻辑的控制方法,其优点在于可以很好地处理复杂的非线性和不确定性系统,而且不需要精确的数学模型和计算,能够快速实现控制的优化。
二、实例介绍
本次实例采用一个双轮小车为对象,实现小车在平面上向指定位置运动的控制。
通过小车的速度和转向角两个输入变量,输出一个模糊控制信号,控制小车前进和转向。
三、实验过程
1. 建立模糊控制系统模型
打开Simulink软件,建立一个新模型,模型中包括输入变量、输出变量和控制器。
2. 设计输入变量和输出变量
(1)设计输入变量
本实例选择小车速度和转向角两个输入变量,每个变量包含三个模糊集合,速度变量分别为“慢速”、“中速”、“快速”,转向角变量分别为“左转”、“直行”、“右转”。
(2)设计输出变量
模糊控制信号输出变量选择小车的前进和转向,每个变量包含三个模糊集合,分别为“慢行”、“中行”、“快行”、“左转”、“直行”、“右转”。
3. 建立控制器
建立模糊控制器,包含输入变量和输出变量的关系,建立控制规则库和模糊关系。
4. 仿真实验
在Simulink下进行仿真实验,调整控制器参数,观察小车运动状态,对比试验。
四、实验结果
经过多次试验和调整,得到最优的小车模糊控制参数,可以实现小车的平滑运动
和准确转向。
五、实验结论
本实验通过建立一个小车的模糊控制系统,可以有效实现小车的平滑运动和准确转向,控制效果优于传统的PID控制方法。
模糊控制可以很好地处理非线性、不确定性和模糊性的系统,适合许多需要快速优化控制的场合。
仿真软件操作实验报告(3篇)

第1篇实验名称:仿真软件操作实验实验目的:1. 熟悉仿真软件的基本操作和界面布局。
2. 掌握仿真软件的基本功能,如建模、仿真、分析等。
3. 学会使用仿真软件解决实际问题。
实验时间:2023年X月X日实验地点:计算机实验室实验器材:1. 仿真软件:XXX2. 计算机一台3. 实验指导书实验内容:一、仿真软件基本操作1. 打开软件,熟悉界面布局。
2. 学习软件菜单栏、工具栏、状态栏等各个部分的功能。
3. 掌握文件操作,如新建、打开、保存、关闭等。
4. 熟悉软件的基本参数设置。
二、建模操作1. 学习如何创建仿真模型,包括实体、连接器、传感器等。
2. 掌握模型的修改、删除、复制等操作。
3. 学会使用软件提供的建模工具,如拉伸、旋转、镜像等。
三、仿真操作1. 设置仿真参数,如时间、步长、迭代次数等。
2. 学习如何进行仿真,包括启动、暂停、继续、终止等操作。
3. 观察仿真结果,包括数据、曲线、图表等。
四、分析操作1. 学习如何对仿真结果进行分析,包括数据统计、曲线拟合、图表绘制等。
2. 掌握仿真软件提供的分析工具,如方差分析、回归分析等。
3. 将仿真结果与实际数据或理论进行对比,验证仿真模型的准确性。
实验步骤:1. 打开仿真软件,创建一个新项目。
2. 在建模界面,根据实验需求创建仿真模型。
3. 设置仿真参数,启动仿真。
4. 观察仿真结果,进行数据分析。
5. 将仿真结果与实际数据或理论进行对比,验证仿真模型的准确性。
6. 完成实验报告。
实验结果与分析:1. 通过本次实验,掌握了仿真软件的基本操作,包括建模、仿真、分析等。
2. 在建模过程中,学会了创建实体、连接器、传感器等,并能够进行模型的修改、删除、复制等操作。
3. 在仿真过程中,成功设置了仿真参数,启动了仿真,并观察到了仿真结果。
4. 在分析过程中,运用了仿真软件提供的分析工具,对仿真结果进行了数据分析,并与实际数据或理论进行了对比,验证了仿真模型的准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验五SIMULINK仿真实验
一、实验目的
考察连续时间系统的采样控制中,零阶保持器的作用与采样时间间隔对Ts 对系统稳定性的影响
二、实验步骤
开机执行程序,用鼠标双击图标,进入MA TLAB命令窗口:Command Windows在Command Windows窗口中输入:simulink,进入仿真界面,并新建Model文件在Model界面中构造连续时间系统的结构图。
作时域仿真并确定系统时域性能指标。
图(6-1)
带零阶保持器的采样控制系统如下图所示。
作时域仿真,调整采样间隔时间Ts,观察对系统稳定性的影响。
图(6-2)
参考输入量(给定值)作用时,系统连接如图(6-1)所示:
图(6-3)
三、实验要求
(1)按照结构图程序设计好模型图,完成时域仿真的结构图
(2)认真做好时域仿真记录
(3)参考实验图,建立所示如图(6-1)、图(6-2)、图(6-3)的实验原理图;
(4)将鼠标移到原理图中的PID模块进行双击,出现参数设定对话框,将PID 控制器的积分增益和微分增益改为0,使其具有比例调节功能,对系统进行纯比例控制。
1. 单击工具栏中的图标,开始仿真,观测系统的响应曲线,分析系统性
能;调整比例增益,观察响应曲线的变化,分析系统性能的变化。
2. 重复步骤2-3,将控制器的功能改为比例微分控制,观测系统的响应曲线,
分析比例微分控制的作用。
3. 重复步骤2-3,将控制器的功能改为比例积分控制,观测系统的响应曲线,
分析比例积分控制的作用。
4. 重复步骤2-3,将控制器的功能改为比例积分微分控制,观测系统的响应曲
线,分析比例积分微分控制的作用。
5. 参照实验一的步骤,绘出如图(6-2)所示的方块图;
6. 将PID控制器的积分增益和微分增益改为0,对系统进行纯比例控制。
不断
修改比例增益,使系统输出的过渡过程曲线的衰减比n=4,记下此时的比例增益值。
7. 修改比例增益,使系统输出的过渡过程曲线的衰减比n=2,记下此时的比例
增益值。
8. 修改比例增益,使系统输出呈临界振荡波形,记下此时的比例增益值。
9. 将PID控制器的比例、积分增益进行修改,对系统进行比例积分控制。
不断
修改比例、积分增益,使系统输出的过渡过程曲线的衰减比n=2,4,10,记下此时比例和积分增益。
10、将PID控制器的比例, 积分, 微分增益进行修改,对系统进行比例、积分、
微分控制。
不断修改比例、积分、微分增益,使系统输出的过渡过程曲线的衰减比n=2、4、10记下此时的比例、积分、微分增益值。
四、实验报告要求
(1)叙述零阶保持器的作用
(2)讨论采样时间间隔Ts对系统的影响。
(3)写出完整实验报告
附:step模块在sources库中
sum模块在math operations库中
scope模块在sinks库中
transfer fcn模块在continuous库中
zero-order hold模块在discrete库中。