基于神经网络柔性机器人反演控制器的设计
基于神经网络的空间柔性机械臂PID快速学习控制

式中: AD = — △日 = 一 D . 日 詹
t eylan a d c mp n aeiv remo e ,po ot n itg ain df rnit n ( I i l e r n o e s t n es — d l rp r o ne rt iee t i v i o f a o P D)c nrl ra d RB e r o t l n F n u a oe l
Abtat F r h aet yt c igpo l fref ai p c o o wt eil maiuaos hsp p r — s c : o et jco a kn rbe o e— ot gsaerbt i f xbe np lt ,ti a e r t r r r m f l n hl r a
第3 8卷第 5期
2 1 年 5月 01
应
用
科
技
V 13 . o 5 o. 8 N .
Ma v201 1
App id Sce e a d Te hn lg le inc n c oo y
d i1 .9 9 ji n 10 6 1 .0 10 . 1 o:0 3 6/.s .0 9— 7 X 2 1 .5 O s
n t r r s d t u r n e tb l yo e s s m.E r rc s f n t n i f r d b I o t l r t x d c n ewok a e u e g a a t e sa i t f h y t o i t e ro o t u ci Sof e y P D c n r l h f e e . o e o e wi i
基 于神 经 网络 的 空 间柔 性 机 械 臂 PD快 速 学 习控 制 I
基于神经网络的反演算法研究

基于神经网络的反演算法研究一、引言在当今科技发展日新月异的年代,人们对于探索新技术的热情越来越高涨。
很多的理论和技术在这个时代应运而生,其中基于神经网络的反演算法是一个备受追捧的研究领域。
反演算法是一种通过观察某些结果来推断出它们的背后机制的算法。
而基于神经网络的反演算法则是将神经网络作为反演算法的工具,通过对大量数据的学习来预测未知的数据。
本文将探讨基于神经网络的反演算法的原理、优势及应用。
二、基于神经网络的反演算法原理基于神经网络的反演算法是指使用神经网络来完成反演算法的工作。
反演的目标是通过一个已知数据集,使神经网络产生一个模型去预测另一个未知数据集。
在反演过程中,通常会对神经网络进行训练,以提高其预测能力。
训练过程中,神经网络接受一组已知的输入数据,并将其转化为对应的输出数据。
在反演的情况下,输入的数据是已知的,而输出的数据则是未知的。
神经网络通过不断调整其参数,并与其输入与输出之间的差距进行比较,在训练结束时学到了输入与输出之间的复杂关系。
这些关系被称为神经网络的“模型”。
三、基于神经网络的反演算法优势基于神经网络的反演算法相对于传统的算法,具有以下几个优势:1.高度适应性神经网络是一种高度适应性的工具,它可以学习和预测极为复杂的关系模型,而传统的算法则需要根据已知的假设式来进行预测。
2.更精确的结果传统的算法通常产生较大的误差,而基于神经网络的反演算法则可以在最优模式中达到更高的预测精度,并且对于近似的结果也有较高的准确性。
3.处理大规模数据传统的反演算法通常会面临处理大量数据的难题。
基于神经网络的反演算法可以有效处理大规模的数据集,并从中学习有价值的模型。
4.易于实施传统的反演算法通常需要编写复杂的代码,而基于神经网络的反演算法则可以实现一种直接的方式来实现其反演功能。
四、基于神经网络的反演算法应用在许多领域中,基于神经网络的反演算法已经得到了广泛的应用。
以下列出了一些具有代表性的应用:1.天文学在天文学中,基于神经网络的反演算法可以用来识别和分类天体,并预测它们的位置、速度和亮度。
柔性机械臂自适应神经网络反演控制

柔性机械臂自适应神经网络反演控制
庞爱民;王振;马双宝
【期刊名称】《机械设计与制造》
【年(卷),期】2024()6
【摘要】柔性机械臂系统是一类具有强耦合性的高阶非线性系统,动力学模型中通常包含一定的结构不确定性。
针对结构不确定性所导致的轨迹跟踪控制复杂问题,提出一种基于RBF神经网络的自适应反演控制方法。
首先分离出系统的已知信息部分和未知信息部分;而后通过反演法设计系统的轨迹跟踪控制器;再采用RBF神经网络对系统模型中的未知信息和虚拟控制量导数进行近似,设计基于RBF神经网络的自适应控制律,并通过Lyapunov理论证明了系统的稳定性。
最后通过数值仿并与传统PD控制进行对比,结果表明该方法轨迹跟踪性能更优,跟踪精度提高了80%以上,证明了控制方法的有效性。
【总页数】6页(P309-314)
【作者】庞爱民;王振;马双宝
【作者单位】武汉纺织大学机械工程与自动化学院;湖北省数字化纺织装备重点实验室
【正文语种】中文
【中图分类】TH16
【相关文献】
1.基于自适应神经网络的柔性关节机械臂控制
2.柔性关节-柔性臂空间机器人的神经网络自适应反演控制及双重柔性振动抑制
3.基于RBF神经网络的不确定机械臂自适应反演控制研究
4.水果采摘机械臂神经网络自适应反演控制研究
5.基于神经网络柔性关节机械臂反演滑模控制
因版权原因,仅展示原文概要,查看原文内容请购买。
基于神经网络的柔性机器人应用研究
基于神经网络的柔性机器人应用研究一、引言随着人工智能技术的日益成熟,柔性机器人的应用越来越广泛。
特别是在一些人力资源匮乏的领域,柔性机器人已经成为一种极具价值和潜力的机器人类型。
然而,柔性机器人的关键在于其柔韧性和适应性,这对其控制系统的要求极高。
基于神经网络的控制技术,成为柔性机器人越来越重要的控制手段。
二、什么是神经网络控制技术神经网络控制技术是一种模仿生物神经系统的学习和适应原理,构建出的数学模型。
它可以模拟人类大脑的思维机制,自我学习、适应外界环境和改进自身控制能力。
在机器人领域,神经网络控制技术最大的优点是可以使机器人具备快速自适应能力,这对柔性机器人的控制具有重要作用。
三、柔性机器人的特点柔性机器人是一种独特的机器人类型,具有以下几个特点:1. 软性设计:柔性机器人采用柔性的材质和结构,可以使其适应各种不规则形状和运动。
2. 多关节设计:柔性机器人具有多个关节,可以实现大范围的运动和控制。
3. 特殊应用领域:柔性机器人通常应用于狭小、危险、难进入的场所,如医疗、救援、航天等领域。
四、柔性机器人的神经网络控制技术1. 神经网络建模技术神经网络可以建模复杂的控制系统和非线性问题,因此被广泛应用于柔性机器人控制领域。
2. 神经网络学习与训练技术神经网络可以通过学习和训练,提高其控制能力和适应性。
对柔性机器人来说,这种能力尤为重要。
3. 神经网络控制优化技术神经网络可以通过控制优化技术,优化其控制策略和动作规划,从而使机器人的控制更加智能化和高效化。
五、柔性机器人神经网络控制技术的应用实例1. 医疗领域应用柔性机器人可应用于内窥镜和手术机器人等医疗领域。
在这些领域中,柔性机器人需要具备精准控制、高度适应和实时响应能力,神经网络控制技术可以实现这些要求。
2. 救援领域应用灾难救援和海底探测等领域,柔性机器人需要具备柔韧性、适应性和灵活性,能够适应复杂环境和任务需求。
神经网络技术可以实现机器人的快速自适应和实时响应。
基于RBF神经网络的上肢柔性外骨骼机器人自适应复合控制
基于RBF神经网络的上肢柔性外骨骼机器人自适应复合控制外骨骼机器人作为一种新兴的机器人技术,具有广泛的应用前景。
而上肢柔性外骨骼机器人是一种能够辅助人体上肢运动的机器人系统,具有良好的灵活性和安全性。
然而,传统的控制方法在解决外骨骼机器人的控制问题上存在一定的局限性。
为了提高上肢柔性外骨骼机器人的控制性能,本文提出了一种基于RBF(径向基函数)神经网络的自适应复合控制方法。
一、概述上肢柔性外骨骼机器人作为一种特殊的机器人系统,主要由机械骨架、柔性传感器和控制系统等组成。
其主要任务是辅助人体上肢运动,并增强上肢力量。
而外骨骼机器人的控制是实现其良好性能的关键。
本文通过引入了RBF神经网络,设计了一种自适应复合控制方法,以提高外骨骼机器人的运动控制性能。
二、RBF神经网络RBF神经网络是一种前馈神经网络,其基本组成由输入层、隐藏层和输出层构成。
隐藏层使用径向基函数作为激活函数。
在外骨骼机器人的控制中,RBF神经网络可以用来建立机器人的运动模型和逆模型,实现机器人的轨迹规划和运动控制。
三、自适应复合控制方法1. 建立机器人的运动模型首先,基于控制对象的物理特性,建立外骨骼机器人的运动学模型和动力学模型。
然后,利用RBF神经网络建立机器人的逆模型,可以根据期望的机器人末端轨迹,计算出对应的关节角度。
2. 设计控制器在自适应复合控制方法中,需要设计两个控制器:位置控制器和力矩控制器。
位置控制器通过计算期望关节角度和当前关节角度之间的偏差,控制外骨骼机器人的位置。
力矩控制器则通过计算期望关节力矩和当前关节力矩之间的偏差,控制外骨骼机器人的力矩。
3. 自适应调节为了进一步提高控制性能,引入了自适应调节机制。
通过监测外骨骼机器人的运动状态和力矩输出,不断调整RFB神经网络中的权值和阈值,以实现运动模型的自适应更新。
四、实验与结果分析在实验中,利用基于RBF神经网络的自适应复合控制方法控制了一台上肢柔性外骨骼机器人进行运动。
基于神经网络算法的智能控制系统设计与优化
基于神经网络算法的智能控制系统设计与优化随着人工智能技术的不断发展和应用,基于神经网络算法的智能控制系统已经成为了一种趋势。
智能控制系统可以应用于汽车、工业、机器人等领域,使得设备更加精准、高效。
本文将探讨如何基于神经网络算法设计和优化智能控制系统。
一、神经网络算法简介神经网络算法是一种通过模拟人类大脑神经元的方式实现学习和决策的算法。
与传统的机器学习算法相比,神经网络算法具有更高的自适应性和更好的泛化性能,适用于非线性、高维度的问题。
神经网络算法通常包括输入层、隐藏层和输出层。
输入层接收输入数据,隐藏层通过一系列的计算对数据进行处理,输出层得出最终的预测结果。
神经网络算法通常需要进行训练,通过不断的反馈和调整权重,使得预测结果越来越准确。
二、智能控制系统设计流程智能控制系统的设计包括模型建立、算法选择、系统实现三个主要步骤。
首先,需要根据需要设计的控制对象建立数学模型。
这一步骤通常需要对控制对象进行系统建模,分析其特性和行为,确定需要控制的变量和控制目标。
可以使用多种数学方法建立模型,如微积分、统计学等。
其次,需要选择合适的算法。
基于神经网络的智能控制系统通常使用反向传播算法进行神经网络训练。
反向传播算法是一种利用梯度下降法对神经网络权重进行优化的算法,可以使得神经网络的预测结果更加准确和稳定。
最后,需要进行系统实现。
这一步骤通常涉及软硬件设备的组装和调试。
需要根据设计好的模型和算法,编写相应的程序,并进行系统测试和优化。
三、优化智能控制系统的方法在智能控制系统的实现过程中,需要对系统进行优化,以提高其准确性、性能和稳定性。
以下是一些常见的优化方法:1. 数据预处理:在训练之前,需要对原始数据进行清洗和预处理,去除离群点和异常数据,消除噪声干扰。
2. 网络结构优化:在设计神经网络结构时,需要根据控制对象的特性和要求,合理确定神经网络的层数、节点数和连接方式。
可以通过交叉验证等方法进行网络结构优化。
基于神经网络的智能机器人设计与实现

基于神经网络的智能机器人设计与实现随着人工智能技术的发展,人们越来越需要能够与人类交互的智能机器人。
为了满足这一需求,许多研究人员和企业都开始着手研发基于神经网络的智能机器人。
神经网络是一种仿造人类大脑神经元结构的计算模型,可以模拟出人类的思维和决策过程。
基于神经网络的智能机器人就是利用这种模型,让机器人能够具备类似于人类思维的能力,从而更好地与人类交互。
要实现基于神经网络的智能机器人,需要进行以下几个方面的研究:1. 机器人的感知能力机器人需要能够以人类类似的方式感知周围的环境,包括声音、视觉、触觉等多个方面。
为了实现这一点,可以使用各种传感器来获取环境信息,并将这些信息输入到神经网络中进行处理和分析。
此外,还需要对机器人进行深度学习,让其能够识别并区分不同的声音、图像、触觉等感觉信息。
2. 机器人的语言能力为了能够更好地与人类进行交互,机器人需要能够理解和使用语言。
通过基于神经网络的自然语言处理技术,机器人可以将人类的语言转化为机器能够理解的数字信号,并进行语义分析、意图理解等相关处理,从而与人类进行精确的沟通。
3. 机器人的决策能力机器人需要在复杂的环境下作出正确的决策。
通过在神经网络中进行训练,并利用强化学习等技术,机器人可以逐渐学习和提高自己的决策能力。
此外,还需要将机器人的决策与环境中不同的事件和目标进行相关联,从而能够实现更高级别的决策。
4. 机器人的执行能力在决定了具体的行动后,机器人需要具备相应的执行能力,能够移动、抓取、操作等。
通过将人工智能技术和机械技术相结合,可以实现对机器人运动控制的深度学习,并进行相应的动作规划和执行。
总结来说,基于神经网络的智能机器人需要具备感知、语言理解、决策和执行等多个方面的能力。
只有在这些方面能够均衡发展,才能实现真正意义上的智能机器人。
但是目前,离真正意义上的智能机器人还存在着较大的差距。
在实际应用上,智能机器人仍面临种种挑战,包括各种复杂的环境、各种复杂的任务、各种人类行为模式等等。
柔性关节机器人的模糊反步自适应位置控制

柔性关节机器人的模糊反步自适应位置控制摘要:本文针对柔性关节机器人的高精度控制问题,提出了一种基于模糊反步自适应算法的位置控制方法。
首先,根据机器人特性,建立了柔性关节机器人动力学模型;其次,利用模糊逻辑推理得到模糊反步控制器,实现了对柔性关节机器人的位置反馈控制;最后,根据反步控制器的控制误差以及运动学方程,得到自适应控制器更新规则,实现了对柔性关节机器人的参数自适应控制。
通过仿真实验对该方法进行验证,结果表明,该控制方法能够有效地提高柔性关节机器人的位置控制精度和自适应性能。
一、引言反步控制是一种修正控制变量的控制方法,其基本思想是通过引入一个反馈控制器对系统误差进行修正,从而实现对系统状态的控制。
反步控制器具有较强的鲁棒性和适应性,能够有效地应对非线性、不确定性和时变性等问题,因此在柔性关节机器人的控制中得到了广泛应用。
然而,反步控制器中的参数往往需要仔细调节,且不适用于模型参数难以测量或变化的情况。
因此,需要将反步控制器与自适应控制相结合,实现对柔性关节机器人动态特性的自适应控制。
二、柔性关节机器人动力学建模柔性关节机器人的动力学特性主要表现在其关节柔度和惯性上。
因此,建立柔性关节机器人的动力学模型需要考虑关节刚度和惯性对机器人运动的影响。
此处假设机器人为单自由度系统,且忽略摩擦和空气阻力的影响。
如图1所示,柔性关节机器人的动力学模型可以表示为:$$J\ddot{\theta}+B\dot{\theta}+K\theta=F$$其中,J表示质量矩阵,B表示阻尼矩阵,K表示刚度矩阵,θ表示机器人关节角度,F表示外部扰动力。
质量矩阵J、阻尼矩阵B和刚度矩阵K分别表示机器人的惯性、阻尼和刚度特性,其中J和K是关节位移的非对称矩阵,而B是对称矩阵。
质量矩阵和刚度矩阵可以根据机器人的物理结构和材料特性进行推导,而阻尼矩阵则需要通过实验或仿真方法确定。
在实际应用中,由于阻尼矩阵往往难以测量,因此可以采用模糊反步自适应控制方法实现对阻尼矩阵的自适应辨识与控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第34卷第1期2018年1月齐齐哈尔大学学报(自然科学版)Journal of Qiqihar U niversity(N atural Science Edition)Vol.34,No.1Jan.,2018基于神经网络柔性机器人反演控制器的设计谢斌,盛魅,杨清志(亳州职业技术学院,安徽亳州236800)摘要:建立柔性机器人系统的动力学模型,对实际情况作了相应的假设,借助于神经网络函数的逼近技术,提出 一种柔性关节空间机器人的自适应反演控制方案,给出基本反演控制器和神经网络反演控制器的数学模型。
仿 真结果表明,能实现系统关节运动控制目标,可使系统各柔性关节的振动较小,有效地控制机器人完成所期望的 关节运动,对无精确模型信息的机器人实现控制,保证系统的稳定性和收敛性,满足机器人系统的控制要求,所 设计的控制器在具体的机器人控制中是可行的。
关键词:反演控制器;神经网络;Lyapunov函数;虚拟控制量中图分类号:TP242 文献标志码:A 文章编号:1007-984X(2018)01-0001-04柔性多体系统动力学的研究成果在机器人技术的发展中得到了广泛的引用,特别是柔性机械臂成为发 展新一代机器人技术的关键性课题代1-3]。
与刚性机械臂相比较,柔性机械臂具有高速操作,高负载自重比,低能耗和低成本等优点,但同时由于弹性变形和振动等原因,影响到系统的稳定性与控制精度,难以建立 精确的系统模型代45]。
为此,将神经网络用于柔性机器人的反演控制器的设计。
1系统描述柔性机器人的动力学方程:(Iq^i^MgLsinqx-q2)=QI+K(q2_q1)=^式中,和分别是柔性力臂和电机的转角,K为柔性力臂的刚度,^e^n是控制输人,•/是电机的转动惯量,/是柔性力臂的转动惯量,M是柔性力臂的质量,Z是柔性力臂重心到关节的长度。
如若取Xi =qi ,义2=Q i ,义3 =Q2 ,义4 =Q2,式(1 )可写成严X1 =X2±2= -^(MgLsinxi +K(%i —X3))‘±3 =±4、±4 =-j(m—K{±3 —±1))为了实现无需建模的柔性机器人反演控制,则把式(2)变成,±1 =±2±2 =±3 +g(±)<±3 =±4~±4 =f(±)+式中,± = [±1±2±3±4]r为系统状态向量,g(±) = —±3 —MgLsin±i/I-尺(±1 —±2)/I ±3)/J,m= 1/J。
g(±),f(±),m未知,但m下界m已知,m>m且m>〇[6]。
⑵⑴f(±)=尺(±1 —2基本反演控制器的设计收稿日期:2017-07-25基金项目:安徽省2015年高等学校重点教学研究项目(2015jyxm535)作者简介:谢斌(1973~),男,安徽涡阳人,副教授,硕士研究生,主要从事机械电子工程应用研究• 2 •齐齐哈尔大学学报(自然科学版)2018 年疋乂:一X u取Xu =为彳兄置指曰^Q1 =文1 一文U =^2一^1d°定义:e2 =X2-X2d(4)式中,X2d为虚拟控制量。
取X2d —Xid-灸1^1,灸1 > 0可得:•e1—e2+X2d—X1d —e2+X1d一^1e1 一X1d —e2- ^1e1(5)设计 Lyapunov函数为:^1—1^1,^1—一灸^2+《^2。
由式(4 )可得:e2—X2- X2d —X3+g- X2d,取己3 —X3 -X3d,取虚拟控制量为:X3d—-g+X2d-灸2e2- e1,灸2>0,蒼为g的估计量。
X2d —X1d一^1e1 —X1d一^1(x2一X1d),e2—g-g-^2e2+e3-e1°设计Lyapunov函数为F2—F1+1e2—1(e1 +e2) (6)朽—一灸1e1+己而+e2e2 — -fc^2—^e2+(g—g)e2+e2e3^g—g,e3 —0时,"^2< 0°e3 —X3 - X3d —X4- X3d°’X3d —-g+X'1d一fc1(x3 +g一X1d)一fc2(x3+g一X2d)一X2+X1d(7)把义3d分解为已知和未知两部分:X3d—X3d一X3d,X3d—X1d一fc1(x3一X1d)一fc2(x3一X2d)+X1d一x2,X3d—g+式中,X3d不包含模型信息,为已知部分,X3d包含模型信息,为未知部分,取X3d-d°定义:e4—X4—X4d设计虚拟变量:X4d —X3d-d-^3e3-e2,式中灸3>0,d为d的估计值。
$3 —-灸3《3 - e2+ e々 +(d- d)设计 Lyapunov函数为:F3 —F2+卜3 —2 (e1+eg+eg),则—"^2+e2e3 — -fc^2-灸2《2-灸3《2+(g- g)e2+(d- d)e2+ ege4(8)当g—g,d—d,e4 —0时,% <0°.e4 —X4 - X4d — /+m w- X4d(9 ) X4d —X.1d-fc1(X4-X.1d)-fc2(e4-X.1d+fc1(X3-X1d))+X1d-X3-fc3(X4-X3d)-(X3-X2d)-fc1fc2g-g-d-fc3X3d-g—X4d+X4d(10)式中,x4d为已知,X4d为未知,fX4d —X1d- fc1(X4- X.1d)- fc2(e4- X1d+fc1(X3 - X1d)) +X1d- X3 - fc3(X4- X3d)<j-(x3—X2d)l X4d — -fc1fc2g-g-d-fc3X3d-g定义:/ =/-^d,则式(9)可写成e4 —/+X4d+ m w—X4d — / —X4d+(m—m)w+ m w(11)式中,沿为m的估计值。
控制律设计为:w=-"^(-/ +X4d一fc4e4一e3)(12)由式(11 )和式12可得e4 -(/- /) +(m- m)w-灸4《4-e3(13)设计Lyapunov函数为:=F3 +2e4 —2(e1+e2+e3 +2e4(14)化—一-fc2e2- fc3e3- fc々e4+(m-说),+(g- g)e2+(d- d)e3 +(/ - /)e4第1期基于神经网络柔性机器人反演控制器的设计• 3 •如若!,彡,/ 能够逼近g ,d ,/,T O ,贝I J 17V 4<0。
3神经网络反演控制器的设计采用RBF 神经网络实现^ /的逼近值,设逼近值分别为足/,贝I J :(g = ^r 0i +£i^d = W ^&2 + £2{/^W 3T 03+£3式中,%为理想权值,0,■为高斯基函数,/ = 1,2,3,||£|卜||[£1而,£3广||<4,丨网^^。
定义:S =命1T01‘ d = #f 02-/=#3T 03式中,为用于未知量估计的神经网络权值。
定义:-〇Z =-〇Z =^10八^102%」0,丨|Z ||_p s Z M = z - Z (15)(16)(17)(18)设计Lyapunov 函数为:f =1§t §+2"(F q -17)+1 兩219:尸 1 00 r 2尸3式中,n = 2§T §,">〇, Q 为正定阵,Q =神经网络权值的自适应律设计为夕= Q 0§T -«QII §l|Z式中,0 = [〇 01 02 03]T ,《为正实数,沿(0)2m ,系统有界。
,§ = [e1 e2 e3 e 4]T ,T O = T O —T O 204仿真验证在控制对象1式,取实际参数从=0.2,1=0.02,/=1.35\10-2,=7.47,1/=2.16\10-1。
位置指令心=5加,系统 初始值为x (0) = 0,控制器参数^ = fc2 =岣=fc 4 = 3.5。
采用RBF 神经网络逼近g ,d 和/,控制律取式100, 自适应律取式109和113,神经网络输人取x = [X 1巧A &]T ,在自适应律中,取《 = 0.01 ,尸2=尸3= 尸4=250,即Q = d ,邶(0, 0.004, 0.004, 0.004)。
根据 _/=2.16x 10-1的实际值,可取巴=1.0。
在自适应律的设计中,估计参数T O 与控制输人^之间互相影响,具有很强的耦合关系,^的变化直接影 响T O 的变化;如果T O 值太小,则^会很大,从而自适应律中的T O 会很大,则T O 值变化幅度会很大,可能导致T O 为零 的情况,为了防止这种情况,应保证T O —直处于较大值;如果T O 值太大,则^会很小,从而自适应律中的T O 会 很小,则T O 值变化幅度会很小,从而导致T O —直很小,控制输人失效。
为了防止这种情况,应保证T O 值不能 太大。
因此在仿真实验中,T O 值应结合经验取适当较大的值,取T O (0) = 1 000。
另外为了保证T O 值不会很大, 将"值取得大些,U = 150。
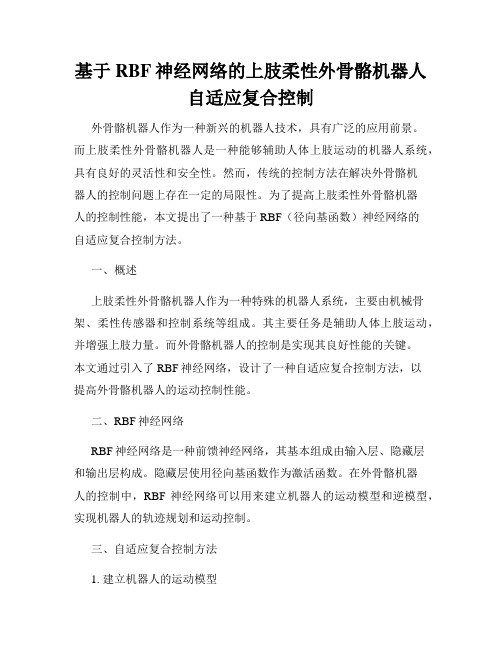
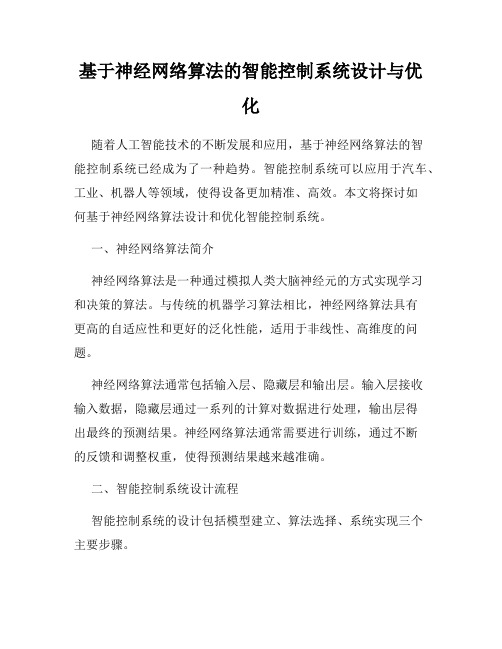
仿真结果如图1〜3所示,真个系统稳定,达到预期的精度要求。
.4步齐齐哈尔大学学报(自然科学版)2018年time/s图2控制输人图3 g〇)估计5结束语对所建立动力学模型,根据实际情况作相应的假设,提出一种基于神经网络的反演控制器设计方法;借助于神经网络函数逼近技术,提出一种柔性机器人的自适应反演控制方案。
通过仿真结果表明该方案可 使系统各柔性关节的振动较小,能够有效地控制空间机器人完成所期望的关节运动。
降低机器人系统中不 确定因素对控制系统的影响;适当调整控制器参数可以实现无需机器人精确模型信息的控制,也能保证系 统的稳定性和收敛性,满足机器人系统的控制要求;在以后实验中将进一步验证该控制方法的有效性。
参考文献:[1]李晓刚,刘普浩.基于反演设计的码垛机器人神经网络自适应控制[J].包装工程,2012⑴:80-85[2]阮玉镇.水果采摘机械臂神经网络自适应反演控制研究[J].农机化研究,2015⑶:165-169[3]陈志勇,陈力.柔性关节空间机器人基于神经网络的自适应反演控制[J].工程力学,2013(4):397-401[4]吴忠强,张晓霞,舒杰.柔性机器人基于自适应模糊动态面的实用稳定控制[J].中国机械工程,2012(19):2297-2301[5]过希文,王群京,李国丽.基于动态面的机械臂轨迹跟踪神经网络自适应算法[J].系统仿真学报,2011(11):2327-2332[6]严琴,髙国琴,邬燕忠.自适应反演神经网络控制在并联机器人中的应用[J].机械设计与制造,2010(5):77-79[7]王洪瑞,冯玉东,刘秀玲,等.基于反演设计的机器人自适应动态滑模控制[J].计算机工程与应用,2010(8):211-213Design of backstepping controller for flexible robot based on neural networkXIE Bin, SHENG Kui, YANG Qing-zhi(Bozhou Vocatioal and Technical College,Anhui Bozhou 236800,China )Abstract;The dynamic model of flexible robot system,the actual situation of the corresponding hypothesis,based on neural network function approximation technique,an adaptive inversion of a flexible joint space robot control scheme,gives the mathematical model of basic inversion controller and neural network inversion controller.The simulation results show that the control system can achieve the goal of joint movement,the smaller the vibration of flexible joint system,joint movement effectively control the robot to complete the desired,to achieve control of the non accurate model of robot,ensure the stability and convergence of the control system,to meet the demands of robot system,the controller designed is feasible in the robot control.Key words;backstepping controller;neural network;Lyapunov function;virtual control quantity。