2019最新1控制器规格书物理
鲁科版(2019)高中物理 选择性必修第一册1
1. 用如图所示的装置可以验证动量守恒定律,在滑
块A和B相碰的端面上装上弹性碰撞架,它们的上端
装有等宽的挡光片。
两光电门间的某一适当位置。给A一个向右的初速度,
通过光电门Ⅰ的时间为∆t1,A与B碰撞后A再次通过
光电门Ⅰ的时间为∆t2 ,滑块B通过光电门Ⅱ的时间
为Δt3。为完成该实验,还必需测量的物理量
实验器材
斜槽轨道、半径相等的钢球和玻璃球、白纸、复写纸、小铅锤、
天平(附硅码)、毫米刻度尺、圆规。
第1章 动量及其守恒定律 第3节 科学验证:动量守恒定律
实验原理与设计
质量分别为 m1 和m2的两小球 A 、B 发生正碰,若碰撞前
球 A 的速度为v1,球 B 静止,碰撞后的速度分别为1′和
2′ ,根据动量守恒定律,应有1 1 = 1 1′ + 2 2′ 。
靠近槽口处,使小球a从斜槽轨道上某固定点由静
止释放,撞到木板并在白纸上留下痕迹O;
②将木板向右平移适当的距离并固定,再使小球a
从原固定点由静止释放,撞到木板并在白纸上留
下痕迹P;
③把小球b静止放在斜槽轨道的水平段的最右端,
让小球a仍从原固定点由静止释放,和小球b相碰后,
两小球撞到木板并在白纸上留下痕迹M和N;
ห้องสมุดไป่ตู้
ma
yP
ma
yN
mb
yM
(3)只要由静止从同一位置释放小球a,
小球到达轨道底端时速度相等,摩擦力
对实验结果不会产生影响。
第1章 动量及其守恒定律 第3节 科学验证:动量守恒定律
谢 谢!
3. 能撰写规范的实验报告,对验证动量守恒定律的实验过程进行交流和反思。
DSFXXD1控制器规格书精品资料

试
保存伺服系统的参数,可以进行点动、在外部没有接线的情况下,可直接置 ON输入信号,可以实时监控伺服系统的状态,并且可以生成曲线,以最形
软
象的方式展现伺服系统的响应性及稳定性等信息,以方便伺服参数的调节。
件
专用通讯线
调 试 软 件
提供快速的参数设置、读取、保存、打印等等!从3.1.2C至F版固件 全兼容!
等待时间
闪 光 对 焊 机
轴 承 套 圈 自 动 车 床
可利用外部端子输入信号触发正反两方向找
原点功能 原点,也可以将当前位置直接定义为原点。
功
能 齐
电子齿轮比可自由设定,并可在运行中设定
动态齿轮 ,设定后的电子齿轮比将立即生效。
全
两组PID参数之间进行切换! 参数切换
/SPD-B /N-OT
编码器Z信号
反
转
方向寻Fra bibliotek原点找
原
点
编码器Z相信号在电机的每一圈内固定且唯一,因此,利用Z信号来确定 原点,将会比单纯依靠外部信号来确定原点更加准确!
指
定
当
复位信号
前
停止条件
/SPD-D
点
原点
位
原
点
总
PLC样例 程序
HMI样例
线
程序
控
制
PLC
OR
HMI
RS485
RS485
调
直观易用的上位机软件,为伺服系统的调试提供了极大的方便,可修改、
伺服电机按照预先设定的位置、速度、加减速时间段与段之 间的等待时间等参数进行相对及绝对定位控制!
如左图中,工作位置每次固定 转动90度其运行参数相对固定,可 以将这些参数直接设置到伺服驱动 器中,当然,也可以利用上位机来 随时修改!
控制器说明书
目录1 简介2 规范2.1 DUALAC2的技术规范 5 2.2 DUALAC2&HP的技术规范 6 2.3 DUALAC2 POWER(加强型)的技术规范 7 2.4 DUALAC2&HP POWER(加强型)的技术规范 8 2.5 控制单元 82.5.1微动开关82.5.2 加速单元 82.5.3 其他模拟控制单元 92.5.4 速度反馈 92.5.5 转向角传感器 10 2.6 保护特性 11 2.7 操作特性 12 2.8 故障诊断 13 2.9 热保护措施 13 2.10 常规问题的解决与防范 13 2.11 磁化与磁辐射 132.12 主接触器与应急开关 143 安全与保护144、安装14 4.1 连接电缆 14 4.2 接触器 15 4.3 熔断器 15 4.4 “DUALAC2”与“DUALAC2”加强型的接线说明 15 4.5 “DUALAC2”与“DUALAC2&HP”加强型的接线说明 17 4.6编码器安装 19 4.7CANBUS连接器的结构 194.7.1单个DUALAC2 控制器 194.7.2“DUALAC2”作为CANBUS网络的终端模块 204.7.3“DUALAC2”作为循环模块接入CANBUS网络 20 4.8电源接线图 214.8.1“DUALAC2” 214.8.2“DUALAC2加强型” 224.8.3“DUAL AC2&HP” 234.8.4“DUALAC2&HP加强型” 24 4.9机械图 25 4.10“DUALAC2”与“DUALAC2加强型”标准接线图 294.11 “DUALAC2&HP”与“DUALAC2&HP加强型”标准接线图 305、利用手持单元的编程及调整 315.1使用手持单元调整 31 5.2手持单元及连接器接线的描述 315.3标准手持单元菜单的介绍 32 5.3.1 “DUALAC2”与“DUALAC2加强型”菜单结构 325.3.1a 主菜单 325.3.1b 从菜单 335.3.2 “DUALAC2&HP”与“DUALAC2&HP加强型”菜单设置 345.3.2a 主菜单 345.3.2b 从菜单 35 5.4 功能设置 35 5.4.1 “DUALAC2”与“DUALAC2加强型”—主控制部分 35 5.4.2 “DUALAC2”与“DUALAC2加强型”—从控制部分 375.4.3 “DUALAC2&HP”与“DUALAC2&HP加强型”—主控制部分功能 38 5.4.4 “DUALAC2&HP”与“DUALAC2&HP加强型”—从控制部分功能 38 5.5 参数调节 40 5.5.1 “DUALAC2”—主控制部分 40 5.5.2 “DUALAC2”—从控制部分 41 5.5.3 “DUALAC2&HP”—主控制部分 415.5.4 “DUALAC2&HP”—从控制部分 42 5.6 可编程的控制器的功能 46 5.6.1 功能设置(参见 5.4) 465.6.2 参数编程(参见5.5) 465.6.3“DUALAC2&HP”与“DUALAC2&HP加强型”测试 465.6.4“DUALAC2&HP”与“DUALAC2&HP加强型”测试 475.6.5 储存功能(存储数据)—仅适用于PC 控制 47 5.6.6 复制功能(下载参数用于其他控制)—仅适用于PC手持单元 47 5.6.7 显示最后5次报警信息,连同小时计值,温度一起显示 47 5.6.8 加速器范围整定 48 5.6.9 参见手持单元手册对于功能和参数的详细说明 48 5.7 AC牵引逆变器设置顺序 48 5.8 测试功能描述 48 5.8.1 “DUALAC2”与“DUALAC2加强型”—主控制部分 495.8.2 “DUALAC2”与“DUALAC2加强型”—从控制部分 50 5.8.3 “DUALAC2&HP”与“DUALAC2&HP加强型”—主控制部分 515.8.4 “DUALAC2&HP”与“DUALAC2&HP加强型”—从控制部分 526、其他功能54 6.1 保存与复制功能 54 6.2 报警菜单描述 54 6.3 手持单元整定加速器操作过程 557、“DUALAC2”与“DUALAC2&HP”故障诊断56 7.1 与牵引相关的错误编码 56 7.2 手持单元显示的关于牵引相关的报警分析 60 7.3 与泵斩波器相关的故障编码 647.4 手持单元显示的关于油泵方面的报警分析 658、推荐使用部件659、定期维护 67= 凡标注此记号的章节是与安全相关的内容出版物编号:版本1 简介ZAPIMOS系列中的DUAL AC2逆变器适合用于3—7KW一对电机控制。
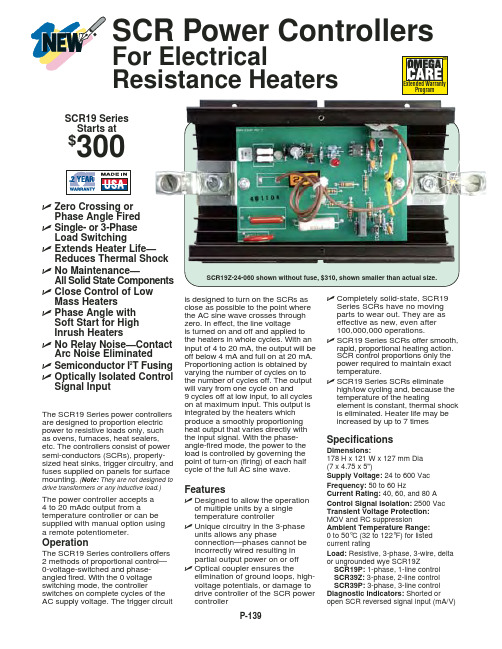
SCR19系列电源控制器产品说明书
=
5%
power
change
minimum step change. Infinitely
variable time base units also
produce less power line disturbances.
Dimensions: mm (in)
Model No.
ߜ No Relay Noise—Contact Arc Noise Eliminated
ߜ Semiconductor I2T Fusing ߜ Optically Isolated Control
Signal Input
The SCR19 Series power controllers are designed to proportion electric power to resistive loads only, such as ovens, furnaces, heat sealers, etc. The controllers consist of power semi-conductors (SCRs), properlysized heat sinks, trigger circuitry, and fuses supplied on panels for surface mounting. (Note: They are not designed to
controller with infinitely variable time
base provides maximum closeness
in temperature regulation by offering
higher power resolution than fixed
控制器的使用说明书

控 制 器
机种一览 24V 触摸面板
网关单元
简易绝对 型单元
RoBoNET
ดވ፺ RCS2 Ⴜள / ܠ፺ᄚ༇ / ፊღཔ࠵ดވ፺
మݢ܌େ Ȕᄲख˖CB-RCC-MAɕɕɕȕ Ꮃ 1m/3m/5m ֦ᆻቂݢେدጐ P424
ףబධݢେ Ȕᄲख˖CB-RCS2-PAɕɕɕȕ Ꮃ 1m/3m/5m ֦ᆻቂݢେدጐ P424
对于形状相同但是孔眼位置稍有不同的多个工件的场合,可以通过使用同一位置 No. 的移动指令,但是切换品种编号的 方式予以应对。
定位模式
2 轴独立模式 2 轴控制器时,可以分别指示各轴进行动作。
示教模式
DS-S-C1 兼容模式
可利用外部信号移动滑块(拉杆),将停止位置写入位置数据。 当使用了 DS-S-C1 控制器时,无需变更上位程序,可以直接替换控制器。※ 与驱动轴之间没有兼容性。
2m
5m
0.2m
ܕRS232C ݢେ ᄲख˖CB-ST-
E1MW050-EB ˄ࡒ༥ི
IA-101-X-MW˅
5m
Ꭱ४ݢେ˄دጐ P424˅ Ȕᄲख˖CB-SEL-SJ002ȕ ˄ᅤჵ˅
1m
USB ݢେ˄دጐ P424˅ Ȕᄲख˖CB-SEL-USB010ȕ ˄ࡒ༥ི IA-101-X-USB˅
ə1 ፺ࣙࢆˈᅍᇋ ݕ2 ፺๒ȃ
I/O ፯ I/O ݢେܿ٣ݢ ޡኑݢᅼ
C Ꮃᄲ
1 1 ፺ࣙࢆ 2 2 ፺ࣙࢆ
20 20W པ࠵మ ܌200 200W པ࠵మ܌ 30D RCS2 ቂ 30W པ࠵మ ܌300 300W པ࠵మ܌ 30R RS ቂ 30W པ࠵మ ܌400 400W པ࠵మ܌ 60 60W པ࠵మ ܌600 600W པ࠵మ܌ 100 100W པ࠵మ ܌750 750W པ࠵మ܌ 150 150W པ࠵మ܌
2019人教版普通高中教科书物理选择性必修1目录

普通高中教科书物理选择性必修1
第一章:动量守恒定律
第一节、动量
第二节、动量定理
第三节、动量守恒定律
第四节、实验:验证动量守恒定律
第五节、弹性碰撞和非弹性碰撞
第六节、反冲现象火箭
第二章:机械振动
第一节、简谐运动
第二节、简谐运动的描述
第三节、简谐运动的回复力和能量
第四节、单摆
第五节、用单摆测量重力加速度
第六节、受迫振动共振
第三章:机械波
第一节、波的形成
第二节、波的描述
第三节、波的反射、折射和衍射
第四节、波的干涉
第五节、多普勒效应
第四章:光
第一节、光的折射
第二节、全反射
第三节、光的干涉
第四节、实验:用双缝干涉测量光的波长第五节、光的衍射
第六节、光的偏振激光。
2019_2020学年新教材高中物理第1章第4节速度变化快慢的描述——加速度课件新人教版必修第一册

(1)计算蜻蜓和火箭的加速度的大小并说明谁的速度变化快. (2)分析蜻蜓和火箭的加速度方向与速度方向的关系. (3)试根据上述情景和问题讨论在直线运动中物体做加速运动 或减速运动的条件是什么? 要点提示 (1)11.4 m/s2 10 m/s2 蜻蜓的速度变化快 (2)蜻蜓的加速度方向与速度方向相反;火箭的加速度方向与速 度方向相同. (3)在直线运动中,当加速度方向与速度方向相同时,物体做加 速运动;当加速度方向与速度方向相反时,s 初、末的速度的大小,这就隐含了 两速度方向可能相同,也可能相反.若两速度方向相同,物体做 匀加速运动,Δ v=6 m/s,a=6 m/s2;若两速度方向相反,取初 速度的方向为正方向,则 v=-10 m/s,全过程时间 t=1 s,Δ v =v-v0=-14 m/s,则 a=v-t v0=-101-4 m/s2=-14 m/s2,负 号说明 a 的方向与初速度方向相反,选项 B、D 正确.
速度变化量Δ v
加速度 a
物理 表示物体运动的 表示物体速度变 表示物体速度变
意义 快慢和方向
化的大小和方向 化的快慢和方向
大小 三个物理量的大小没有必然联系,其中一个物理量较
关系 大时,其余两个物理量不一定较大
关键能力 1 对速度与加速度关系的理解 速度与加速度的关系,下列说法中正确的是( )
A.速度变化得越多,加速度就越大 B.速度变化得越快,加速度就越大 C.加速度方向保持不变,速度方向也保持不变 D.加速度大小不断变小,速度大小也不断变小
间的比值. Δ v 3.公式:a=__Δ__t__. 4.单位:在国际单位制中,加速度的单位是___米__每__二__次__方__秒____, 符号为__m__/s_2_或___m_·__s_-_2____.
2022-2023年人教版(2019)新教材高中物理必修1 第1章运动的描述1
⒊ 物理意义:精确地描述物体运动的快慢.
⒋ 方向:这一时刻物体的运动方向.
5.速率:瞬时速度的大小叫作瞬时速率
6. 在匀速直线运动中,平均速度等于瞬时速度.
六.平均速率
定义:物体在某一段时间内通过的路程与通过 这段路程所用时间的比值. 定义式: v s,s是指物体在某段时间内的路程
t 标量性:平均速率是标量,只有大小,没有方向
议
1.速度和速率的区别和联系 2.瞬时速度和平均速度的区别和联系 3.平均速度和平均速率的区别和联系 4.在x-t图像中,根据什么来描述速度
展,评
展评
项目
物理意 义
速度
描述物运动的快慢和方向的物理 量,是矢量.
速率
描述物体运动的快慢的物理量, 是标量.
分类
平均速度,瞬时速度
平均速率,瞬时速率
决定因 素 方向
瞬时速度是指物体在某时刻或 经过某位置时的速度,它能精确 地描述物体在某时刻或某位置 运动的快慢和方向.
方向 物体的位移方向
物体此时的运动方向,即物体在 运动轨迹上过该点的切线方向,
联系
对应关 与一段位移(时间)相对应,是过程量 与某一时刻(位置)相对应.是
系
状态量
大小
(1)瞬时速度是极短时间内的平均速度.(2)都描述物体运动的快慢和方向. 都是矢量.国际单位都是m/s.(3)在匀速直线运动中,平均速度等于瞬时速度, 在变速直线运动中,某段时间内的平均速度和这段时间内某个时刻的瞬时速度没 有直接关系.
②若图线是一条平行于时间轴的直线,就表示质点静 止
③若图线是一条曲线,就表示质点做变速运动
检
1.下列有关常见物体的运动速度的表述
中,符合实际情况的是( B )