16m^3平衡式液压抓斗挖泥船臂架系统结构分析
船舶常用液压系统
主泵的伺服系统用来改变主泵的油流方向和油流流量。它由齿轮泵CB1′、溢流阀Y1′、三位四通P型电磁换向阀DT1、单向阀、蓄能器和滤油器等组成。当DT1左右电磁铁均不通电,即如图中位置时,由齿轮泵输出的压力油同时进入变量伺服油缸的左、右腔,使伺服油缸的柱塞固定中间位置,即主油泵的斜盘的倾角为零。需要改变斜盘角度和倾斜方向,即改变主泵排量和变向时,只要接通电磁换向阀的一端电源即可。如果DT1左面的电磁铁通电、右面的电磁铁不通电,则三位四通阀的左位代替中位,压力油进入伺服油缸的右腔,左腔的油液回至油箱,形成回路,使伺服油缸的柱塞向左移到,改变变量斜盘的夹角,实现变量或变向的功能。反之亦然。
1.副油路系统
由齿轮泵CB1、溢流阀Y1及精滤器等组成副油路系统,其功能之一是作为主油路的补油系统,在主油路不工作时,使整个主油路充满着油液。在主油路工作时,始终与主油路的主泵吸油口相通,使主泵吸油口始终维持正压状态,避免空气进入主油路系统。同时能将经冷
却的油液带入主油路中,以利于降低系统的油温。功能之二是作为主油路中的YF1、YF2、DY1、DY2、DY3和DY4阀的控制压力油路。
⑴ 打开锥阀3、7和2、6、12、16,关闭其余所有锥阀。当DY1和DY3均不通电,即通道状态如图所示,这时主泵输出的压力油通过锥阀3ቤተ መጻሕፍቲ ባይዱ电液阀DY1进入油缸Ⅰ无杆腔,而有杆腔的油液通过电液阀DY1和锥阀2回至主油泵的吸油口b组成回路,对舵柄产生推力。同样主泵输出的压力油也通过锥阀7、电液阀DY3进入油缸Ⅲ有杆腔,而无杆腔的油液通过电液阀DY3和锥阀6回至主油泵的吸油口b组成回路,对舵柄产生拉力。舵柄在油缸Ⅰ、Ⅲ生成的力偶作用下开始顺时针转动,从而改变舵角。
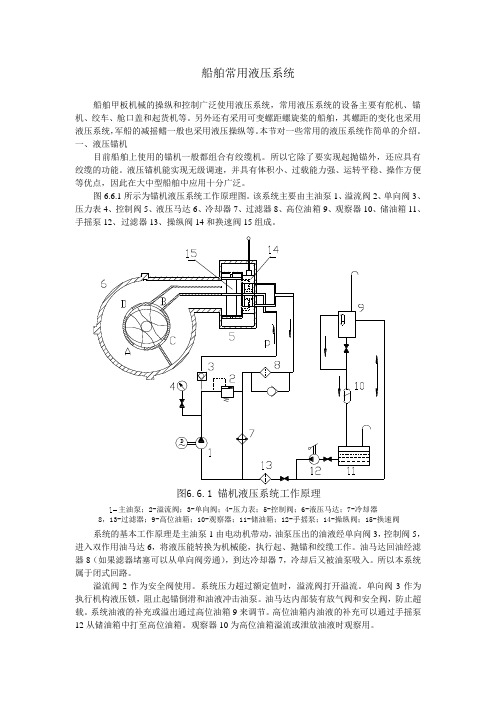
溢流阀2作为安全阀使用。系统压力超过额定值时,溢流阀打开溢流。单向阀3作为执行机构液压锁,阻止起锚倒滑和油液冲击油泵。油马达内部装有放气阀和安全阀,防止超载。系统油液的补充或溢出通过高位油箱9来调节。高位油箱内油液的补充可以通过手摇泵12从储油箱中打至高位油箱。观察器10为高位油箱溢流或泄放油液时观察用。
工程机械船用液压抓斗结构和原理

工程机械船用液压抓斗结构和原理1、结构组上铰接了两个铲斗,上、下横梁通过连杆铰接连接,下横梁上面装有液压系统。抓斗上部有挂钩与起升机构相连。液压系统由油箱、油泵、控制阀组、液压油缸等组成,如图所示。两个液压油缸铰接在下横梁两边,活塞杆顶部为锥形,与上横梁中的锥孔紧配,并用螺帽固定。四根连杆把上横梁和抓斗连接起来,当油缸的下部通人压力油、上部回油时,活塞上移,顶动上横梁上移,连杆拉动抓斗,打开抓斗。同理,当油缸上部通人压力油时,抓斗关闭。2、液压系统工作原理抓斗打开过程:油泵正转时,油箱中的油经过止回阀RV3
起重机抓斗结构设计设计与分析

毕业设计说明书起重机抓斗设计与分析学生姓名:学号:学院:系名:机械工程与自动化专业:机械设计制造及其自动化指导老师:年 6月起重机抓斗结构设计设计与分析摘要起重机抓斗是起重机械必不可少的一部分,广泛用于港口、码头、车站货场、矿山等方面装载各种散货、原木、矿物、煤炭、砂石料、土方石等。
起重机抓斗具有提高生产效率和提高生产安全性的特点。
起重机抓斗种类繁多,在不同的场合有不同类型的抓斗,起重机抓斗功能分为空抓斗下降、抓货、满载抓斗上升和卸货。
我国经济飞速发展的今天,抓斗在我国国民经济生产甲的使用范围将日益扩大,具有较好的经济效益,广阔的发展前景。
在起重机抓斗结构设计与分析的过程中,通过收集相关资料,确定抓斗的设计方案,并对其进行结构设计计算,运用Solidworks绘制抓斗组成零件的三维模型,装配所设计的抓斗零件,并绘制二维工程图,然后运用Solidworks软件中的Simulation插件对所设计的抓斗进行有限元分析,判断抓斗的合理性,对所设计抓斗进一步修改,确定最终的抓斗结构。
关键词:计算,Solidworks,三围建模,装配,二维工程图,Simulation,有限元分析Design and analysis of structural design of Grab crane AbstractCrane grab is an essential part of lifting machinery, widely used in ports, terminals, stations garages, loading various aspects of mining and other bulk cargo, timber, minerals, coal, sand and gravel, earth stone. Grab crane with increased productivity and improved safety in production characteristics. Crane grab variety, on different occasions have different types of grabs, crane grab function into an empty grab down, grab the goods, loaded up and grab unloading. The rapid development of China's economy today, grab the national economy will be the use of production A growing, with good economic, broad prospects for development.In the process of design and analysis of grab crane structure, through the collection of relevant information, determine the design scheme of grab, and designthe structure of the calculation, 3D model using Solidworks drawing grab components, assembly design of grab parts, and 2D engineering drawings, and then use Solidworks software to the Simulation plug-in for the finite element analysis on the design of grab, grab the rationality of judgment, further modifications to the design of grab bucket structure, determine the final structure of the grab..Keywords: Calculate, Solidworks, measurements modeling, assembly, two-dimensional engineering drawings, Simulation, finite element analysis目录第1章前言 (1)1.1课题介绍 (1)1.2抓斗作业在国民生产中的作用 (1)1.3国内外抓斗发展史 (2)1.3.1国外抓斗研究的发展史 (2)1.3.2国内抓斗研究的发展史 (3)1.4抓斗设计及研究现状 (3)1.5抓斗的发展方向 (3)1.6本课题的现实意义 (4)1.6.1任务及要求 (4)1.6.2现实意义 (5)第2章抓斗方案的确定 (6)2.1抓斗类型 (6)2.2抓斗的选用 (7)2.3抓斗方案的确定 (7)2.3.1不同抓斗性能的比较 (7)2.3.2方案的确定 (10)第3章液压抓斗的结构设计计算 (14)3.1总体方案确定 (14)3.2.2 刃口板厚度 (16)3.2.3抓斗强度计算 (17)3.2.4抓斗自重的分配 (18)3.3抓斗液压系统的确定 (19)第4章抓斗三维建模与绘图 (21)第5章抓斗的有限元分析 (25)5.1有限元分析软件介绍 (25)5.2分析过程与结果 (25)第6章总结 (30)参考文献 (31)致谢 (32)第1章前言1.1课题介绍抓斗是广泛应用于装卸散货的一种取物装置(今年来还发展了许多用于装卸件货,例如木材、钢锭的抓具,广义上,他们也应被纳入在抓斗的范围内)。
臂式斗轮堆取料机平衡梁结构分析

臂式斗轮堆取料机平衡梁结构分析摘要:通过对臂式斗轮堆取料机平衡梁结构分析,确定其结构合理性,并对平衡梁强度及刚度进行计算,校核其截面强度是否符合设计要求。
关键词:臂式斗轮堆取料机平衡梁主应力结构分析1、概述:臂式斗轮堆取料机(以下简称为斗轮机)平衡梁主要应用于三支点式斗轮机,具体布置在三支点门座单支点一侧下方,行走机构鞍座的上方,是斗轮机中重要的连接及承载钢结构。
平衡梁的结构布置导致其承载很大重量(一百多吨),对其结构的强度及刚度要求很高,因此我们对其结构特点进行详细分析,并具体举例对其主要受力点进行应力及挠度计算。
2、结构分析:平衡梁的结构主要有三部分:主箱梁、支腿、上部轴承座平衡梁的主截面为封闭箱梁,惯性矩大,结构承载能力比较强。
箱梁内部布置四道筋板,防止局部变形。
受结构限制,箱梁内部筋板只能焊三边,所以筋板底边不施焊并留有缝隙,防止筋板受力变形。
(详见下图)平衡梁的两侧支腿与行走鞍座采用栓接形式,便于下方行走机构的维修,连接孔加工形式采用配钻,保证其安装精度。
两支腿下表面一同加工以保证其平面度。
支腿腹板插入箱梁内部,保证其截面高度,并在支腿箱梁内焊有短筋板,加强局部稳定性。
平衡梁上部轴承座与门座采用销轴联接,轴承座采用整板下料贯穿箱梁内部,与上下盖板及筋板焊为一体。
下端探出下盖板20mm,更便于与下盖板施焊。
3、实例计算:通过对我公司现有一伊朗项目进行举例,具体计算平衡梁主截面正应力,轴承座挤压应力,平衡梁变形挠度,校核整体结构是否满足强度和刚度的需求。
3.1平衡梁主截面正应力平衡梁正应力由两部分载荷组成:集中载荷P所,自重载荷G主应力σ=σ1+σ2=M1/W+M2/W;其中σ1:集中载荷产生的主应力;σ2:自重产生的主应力;M1:集中载荷产生弯矩M2:自重产生弯矩W:抗弯截面模量将平衡梁作为双支点简支梁(如上图),根据机械设计手册,其集中载荷最大弯矩:M1=RA*L/2=PL/4,集中载荷P可通过重心偏移及平衡梁上部结构重量得出P≈150t,L=8000mm,M1=150*8000/4=300000t.mm查阅机械设计手册:W==BH3-bh3/6H=710*15053-690*14733/6*1505=2.38* 107mm3σ1=M1/W=300000/2.38*107=0.00252t/mm2=126MPa根据机械设计手册M2=GL/8;G=5.5t;L=8000mm;M1=5.5*8000/4=11000t.mm;σ1=M2/W=11000/2.38*107=0.00046t/mm2=4.6MPa;σ=σ1+σ2=126+4.6=130.6MPa此项目钢板选用Q345-B材质,屈服极限σs=345MPa安全系数:σs/σ=2.64,安全系数大于1.34(GB/T3811-2008起重机设计规范),满足要求。
抓斗式挖泥船施工技术
抓斗式挖泥船施工技术一、开工展布抓斗式挖泥船开工展布包括挖泥船进点定位、锚缆抛设布置、定位方式等基本过程。
(1)进点定位。
抓斗式挖泥船在不同的水域、流速、风力、风向等工况条件下进点定位方式也有所区别,要视具体情况灵活掌握。
1)在通常水域施工,一般采用的定位方法是:抓斗挖泥船被拖到施工区,当GPS坐标点与施工图坐标点基本重合后,随即放下抓斗定住船位,再依次抛锚展布。
这类方法又有逆流进位顺流施工、逆流进位逆流施工和顺流进位顺流施工等3种进点定位方式。
A.逆流进位顺流施工。
先放下抓斗临时固定住船位,再利用拖轮或锚艇将一尾锚抛向船头方向,收紧尾锚缆,使船体与水流流向形成夹角后提起抓斗,在水力作用下进行调头。
调头完成后再将抓斗抛下,临时固定船位,再利用拖轮或锚艇依次抛锚展布。
锚抛完后,再通过收放锚缆细调船位、船向。
之后再利用拖轮和水流冲力调头。
B.逆流进位逆流施工。
在挖槽起点位置先放下抓斗临时固定住船位,再利用拖轮或锚艇依次抛锚展布。
一般先抛逆水(顶水)锚,后抛顺水锚;当流速较缓,而风较大时,可先抛上风锚,再抛下风锚。
所有锚抛下后,再通过收放锚缆,细调船位、船向。
C.顺流进位顺流施工。
可在预定位置先抛一尾锚,并放出锚缆。
当挖泥船到达挖槽起点位置后,放下抓斗临时固定住船位,再利用拖轮或锚艇依次抛锚展布。
锚抛完后,再通过收放锚缆细调船位、船向。
2)如果开挖区流急、水深、风强,船位用抛抓斗不易固定时,可先在附近缓流区、浅水区或风浪较小的区域抛斗定位,然后抛出顶水锚,再绞锚缆进位。
在山区河道施工,往往水流湍急紊乱,河底又多为卵石或岩石,抛锚也可能无法固定船位,此种情况下可根据岸边地形地质的不同采用如下“岸缆”措施。
A.埋设地垄。
当岸边为滩地,且无岩石土质易开挖时,可采用埋设地垄的方式固定船位,地垄位置应避免选在陡坎边缘或陡坡上,地垄前应有足够的稳定阻挡土体。
B.围捆巨石。
当岸边有着地稳定的巨型孤石或突出牢靠的岩角时,可采用锚缆或钢缆对其进行围捆,并在靠水域一侧与锚缆相连。
某型号起重机抓斗结构设计说明书

目录1绪论 (1)1.1 抓斗的研究背景 (1)1.2 国内外抓斗的发展现状 (2)1.2.1 国外发展现状 (2)1.2.2 国内发展现状 (3)1.3 抓斗发展趋势 (3)1.4 研究内容 (4)2抓斗方案确定 (5)2.1 常见抓斗形式 (5)2.1.1单绳抓斗 (5)2.1.2长撑杆抓斗 (5)2.1.3 耙集式抓斗 (6)2.1.4 剪式抓斗 (7)2.1.5钳式抓斗 (8)2.1.6多颚板抓斗 (9)2.1.7马达抓斗 (9)2.1.8扭矩抓斗 (10)2.2 抓斗选择 (11)2.2.1抓斗选取要求 (11)2.2.2抓斗结构 (13)2.2.3抓斗工作原理 (14)3.1 影响抓斗抓取能力的因素 (14)3.1.1散料特性 (15)3.1.2抓斗结构尺寸 (15)3.1.3抓斗自重G (16)3.1.4设计意见 (16)3.2 抓斗设计计算 (17)3.2.1抓斗自重的计算 (17)3.2.2抓斗自重分配 (18)3.2.3颚板宽度B (19)3.2.4抓斗最大开度........................... (19)3.2.5抓斗的其他几何参数.................. (20)3.2.6抓斗颚板侧面形状 (20)3.2.7滑轮组倍率 (23)3.3抓斗受力分析 (23)3.4抓斗各部分具体参数 (25)3.4.1颚板具体参数 (25)3.4.2撑杆具体参数 (26)3.4.3上承梁具体参数 (26)3.4.4下承梁具体参数 (26)3.4.5滑轮支撑件具体参数 (26)3.4.6钢丝绳选择 (27)3.4.7滑轮组选择 (27)3.4.8其他零件 (29)3.5.1抓取能力验算 (29)3.5.2颚板强度校核 (30)3.5.3抓斗颚板与下承梁连接轴校核 (31)3.5.4连接螺栓M48强度校核 (31)3.5.5撑杆强度校核 (31)3.5.6滑轮组强度校核 (32)4三维建模过程 (33)4.1 建模过程简述 (32)4.2 抓斗各零件建模实体 (32)4.2.1上撑梁建模 (32)4.2.2撑杆建模 (33)4.2.3下承梁建模 (33)4.2.4颚板一建模 (34)4.2.5颚板二建模 (35)4.2.6滑轮支撑体建模 (36)4.2.7滑轮建模 (37)4.2.8滑轮装配 (37)4.2.9滑轮装配 (38)5 毕业设计总结 (39)参考文献 (40)致谢 (42)1 绪论1.1抓斗的研究背景随着社会的日益发展,一些强度较大的体力劳动逐步被机械生产所替代,起重机则是其中运用最为广泛的工业机械,它对减轻劳动强度,节省人力,降低建设成本,提高生产质量,加快施工建设,实现工程施工机械化起着十分重要的作用。
基于有限元方法的抓斗式挖泥船船体结构强度分析

基于有限元方法的抓斗式挖泥船船体结构强度分析摘要:本文利用MSC.Nastran软件对36m抓斗式挖泥船在两种不同工况下进行有限元分析,给出了适合于该型船舶的边界条件施加方法和载荷计算方法,从计算结果可以了解船体各主要构件的应力水平和薄弱部位,为抓斗式挖泥船的结构设计提供参考。
关键词:挖泥船结构强度结构设计有限元抓斗式挖泥船可以在港口内移至任何需要的地方,抓斗式挖泥船通常在港区或航道内从事挖泥作业,船上有起重设备,吊臂形式主要有固定式和旋转式两种[1],同时可以起吊货物,或是靠泊,或是移到锚地转移大件货物。
本文对36m抓斗式挖泥船在10%燃料备品和全部燃料备品两种载重工况下进行有限元强度分析,以校核该型船舶的结构强度。
1 船体说明36m抓斗式挖泥船结构按《钢质内河船舶建造规范》(2009)[2]的要求进行设计。
本船为自航船,装载有动力装备,既可以固定停靠在特定水域进行挖泥或吊装作业,也可以自行移动进行航道清理工作。
本船除船体自重、船用设备、燃油备品外,不带其他货物等载荷,因此,结构强度计算不需考虑其货物载荷对船体结构强度的影响。
该船长34.9m,船宽8.40m,型深1.5m,结构吃水0.9m,肋距为0.5m,航区为A级,参照Ⅲ类工程船——抓斗式挖泥船进行设计,如图1所示。
2 有限元模型2.1 有限元模型取直角坐标系,坐标原点位于船体中心线#20肋位处,X轴沿船长方向以向首为正,Y轴沿船宽方向以向左舷为正,Z轴沿型深方向以向上为正。
有限元模型单位:长度为米(m),力为牛顿(N)。
利用MSC.Patran有限元软件[3]建立36m挖泥船Fr8~Fr68舱段的有限元模型,如图2和图3所示。
2.2 边界条件根据《钢质内河船舶建造规范》(2009)关于船舶直接计算的要求,在Fr8剖面(A剖面)和Fr68剖面(B剖面)中和轴处分别建立刚性点A、B,在刚性点上施加弯矩。
3 载荷及计算工况[4]由于本船作业时无货物载荷,船体重量载荷只由燃油备品的变化引起,故分析本船的结构强度考虑以下两种载荷工况:(1)10%燃料物品下的载荷,同时在甲板上的起重机起吊3t的泥沙载荷;(2)全部燃料物品下的载荷,同时在甲板上的起重机起吊3t的泥沙载荷。
抓斗式挖泥船挖泥测深及控制系统

抓斗式挖泥船挖泥测深及控制系统摘要:本文针对现使用的抓斗式挖泥船普遍存在的问题,研究分析了开发挖泥船挖泥测深及其控制系统,介绍了系统工艺原理和开发步骤,以供从业人员互相学习进步。
关键词:抓斗式;挖泥船;挖泥测深;控制系统一、抓斗式挖泥船普遍存在问题分析抓斗式挖泥船的超深、超宽控制对工程各方的效益影响日益凸显。
随着GPS 定位系统的引进,挖泥超宽现象已得到有效控制,而船舶施工时水中状况复杂,现有水砣、单波束、多波束测深仪不能实时提供准确有效的数据,使得超深现象难以得到精准控制。
根据经验,通常超深30~5Ocm;不但增加施工成本,有时也满足不了业主对超深控制的要求。
中交第一航务工程局第二工程有限公司“交抓111”船,以下简称交抓111;是1987年从日本购买的8m3抓斗式挖泥船,挖泥深度计精度较低,难以满足对挖泥超深控制的要求。
采用在抓斗提升索上做标记的方法控制挖泥深度,这种方法过于繁琐、精度低,并且容易造成操作人员视力疲劳。
另一方面,交抓111的硬件和程序针对某船专门设计,不通用,长期服役,一旦损坏很难修复。
为此在交抓111上开发挖泥测深及控制系统,安装挖泥深度计(以下简称深度计)和抓斗开口度计(以下简称开口度计)。
通过计量抓斗提升索长度实时测量和显示挖泥深度,以及通过计量抓斗提升索和开闭索的长度差值,对抓斗的开口度进行计算和显示。
其中抓斗开口度显示为系统附加功能,目的是使操作人员能够直观掌握抓斗在水下的开合程度,提高操作速度和效率。
该系统特点是深度自动控制,将深度计与挖泥机支持卷筒、开闭卷筒的离合、刹车控制系统连接起来,在深度计上输入1个预设深度后,抓斗在达到该深度时可自动停止并自动进行挖掘,加强操作人员对挖泥超深的掌控。
交抓111抓斗提升、开闭系统见图1:系统开发预定目标和要求如下:1)超深控制需要实现测量准确、安装简便以及实时准确反应的功能。
将高程误差控制在10cm之内,可清晰准确地观察,做到实时观测,抗干扰性强,适应多种环境因素。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引 言
国家 政策 的 大 力 支 持 ,有 力 地 促 进 了航 道 疏 浚行 业 近年 来 的 发 展 。抓 斗 挖 泥 船 作 为 航 道 疏 浚 领域 的重 要 施 工 装 备 在航 道 疏 浚 作 业 中发 挥 着 重
船体 两 部 分 组 成 。其 中 ,船 体 配 备 有 3根 钢 桩 ,
Ke ywo r ds:ba l a n c e d— t y pe hy d r a u l i c g r a b d r e d g e r;f in i t e e l e me nt ;s t a t i c s t r e ng t h a na l y s i s
1 6 i n 3平 衡 式 液压 抓 斗 挖 泥 船 臂 架 系 统结 构分 析
张 . 健 徐 长 生 武汉 4 3 0 0 6 3 武汉理 工 大 学物流 工程 学 院
摘
要 :平 衡 式 液 压 抓 斗 挖 泥 船 是 一 种 全 新 结 构 形 式 的 航 道 疏 浚 装 备 ,文 中 利 用 大 型 有 限 元 分 析 软 件
度 为 一1 0℃ ~+ 5 0℃ 。
泥船 ,在 欧 美 等 国 家 有 着 良好 的应 用 ,而 在 国 内 尚无 应 用 案 例 ,也 无 相 关 的设 计 规 范 , 且 其 工 作 பைடு நூலகம்
环境 恶 劣 ,臂 架 系 统 受 力 非 常 复 杂 多 变 , 因此 ,
利用 相关 的软件 对 其 臂架 系统 进 行 结 构 静 强 度 分
制 造提供指导依据。
1 平 衡 式 液 压 抓 斗 挖 泥 机 结 构 形 式 及 工 作 条 件
1 6 m 平 衡 式 液 压 抓 斗 挖 泥 船 ( 见图 1 ) 由平衡 式液 压抓 斗挖 泥机 和
一
图1 1 6 m 平 衡 式 液 压 抓 斗 挖 泥 船
68 一
《 船舶 与 海 上 设 施 起 重 设 备 规 范 》 和G B 3 8 1 1 _ _ 2 o 0 8《 起 重 机 设 计 规 范 》,对 1 6 m 平 衡 式 液 压 抓 斗 挖 泥
船 臂 架 系统 进 行 结 构 静 强 度 分 析 , 了解 其 不 同 工 况 下 的受 力 状 态 和 应 力 分 布 状 态 ,为 挖 泥 船 产 品 化 设 计
紧凑 、生 产 效 率 高 ,作 为 一 种 全 新 结 构 形 式 的 挖
平衡 式液 压 抓 斗 挖 泥 机 主 要 工作 在 港 口或 遮 蔽水 域航 道环 境 ,最大 浪 高 1 . 5 m,挖 掘作 业 的风
速 为 ≤2 0 m / s ,船舶 调遣 风速 为 ≤5 5 m / s 环 境温
A n s y s ,对 1 6 m 平 衡式 液压 抓 斗挖 泥船 挖泥 机臂 架 系统进 行 结构 静强 度分 析 ,为本 类 型产 品的后 续制 造 提 供依 据 。 关键词 :平衡式液 压抓 斗挖泥船 ;有限元 ;静强度分析
中 图分 类 号 :U 6 7 4 . 3 1 文 献 标 识 码 :A 文章 编 号 :1 0 0 1 —0 7 8 5( 2 0 1 5 )0 9— 0 0 6 8— 0 4
《 起重运输机械》 2 0 1 5( 9 )
饕 誉 黧毒 : I —
、 V 、 、
用 于 起 重机 结 构健 康 监 测 的 光 纤 光栅 应 变 传 感 系 统
周 建华
武汉 市特 种设备 监 督检验 所
摘
武汉
4 3 0 0 1 4
要 :采用光纤光 栅应变传感系统对起重机 重要 结构件 的应力状 态进 行实 时在线测 量 ,实现在 役起 重机
2 平衡 式 液 压 抓 斗挖 泥 机臂 架 系统 的 建 模
平衡 式 液 压 抓 斗 挖 泥 机 臂 架 系 统 各 构 件 均 为
析 ,对 平 衡 式 液 压 抓 斗 挖 泥 船 产 品 化 设 计 有 着
重 要 的 意 义 。本 文 利 用 大 型 有 限 元
软 件 An s y s ,按 照 中 国 船 级 社 C C S
用于 船舶 定 位 和 移 位 。平 衡 式 液 压 抓 斗 挖 泥 机 由 液压 抓 斗 、象 鼻 架 、大 拉 杆 、 主 臂 架 、 配 重 梁 、 主臂 液压 缸 、尾 部 液 压 缸 、转 台 立 柱 、支 撑 圆筒
等组 成 。
要 的作用 ,1 6 m 平 衡式 液 压抓 斗 挖 泥船 结 构 形 式