86系列两相正齿轮箱大力矩混合式步进电机-米思米
步进电机选型手册
北京飞凌东泰电子技术有限公司
010-69732383
86 圆形步进电机系列
技术数据:
步进电机型号
步距 角 (°)
静力 矩 (N.m)
电流 (A)
电阻 (Ω)
电感 (mH)
引线 数 (NO.)
机身 长 (mm)
转动 惯量
重量 (Kg)
(g.cm^2)
FL86BYG62
1.8 1.8 1.9 2.6 9.7
长度 (mm)
115
150
转动 (g.cm^2)
5500 11000
重量 (Kg)
5 8.4
电机轴径均为 19mm,键槽尺寸为 6*35mm 接线图:
北京飞凌东泰电子技术有限公司
010-69732383
130 圆形步进电机系列
技术数据:
步距角
型号
(°)
静力矩 (N.m)
电流 (A)
电阻 (Ω)
电感 (mH)
外形图:
相感抗(mH ±20%)
2.3 25 4.2 36 6
长度 (mm)
71 103 103 135 135
重量 (Kg)
1.7 2.85 2.85
4 4
型号 FL86BYG3A71 FL86BYG3A103 FL86BYG3A103 FL86BYG3A135 FL86BYG3A135 接线图:
型号
FL86BYG65
FL86BYG80 FL86BYG118 FL86BYG156
轴径 键槽
φ9.5 、 单平台
φ14
0.8×25
φ12.7 25
φ15.875 5×25
北京飞凌东泰电子技术有限公司
接线图:
三相步进电机

产品详情价格:180元最小采购量:不限品牌/型号:Leadshine雷赛/863S22、863S42、863S68H 额定转矩:2.26/4.26/6.78(NM)产品介绍Leadshine雷赛86系列三相步进电机:863S22、863S42、863S68H的详细信息∙品牌/型号:Leadshine雷赛/863S22、863S42、863S68H∙额定转矩:2.26/4.26/6.78(NM)∙产品类型:三相混和式步进电机∙额定功率:22-50(W)W∙额定电压:24-48(V)V∙额定电流:5.0/5.0/3.5(A)A∙额定转速:1600(rpm)r/min∙外形尺寸:73/105/127(mm)mm∙产品认证:CE∙适用范围:3DM683/3ND583/3ND883/3ND1183/3ND2283∙效率:98(%)%∙Leadshine雷赛86系列三相步进电机:863S22、863S42、863S68H∙o86系列三相步进电机*以上仅为代表性产品外形尺寸接线图步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
森创 SH-20806D 两相混合式步进电机细分驱动器 说明书
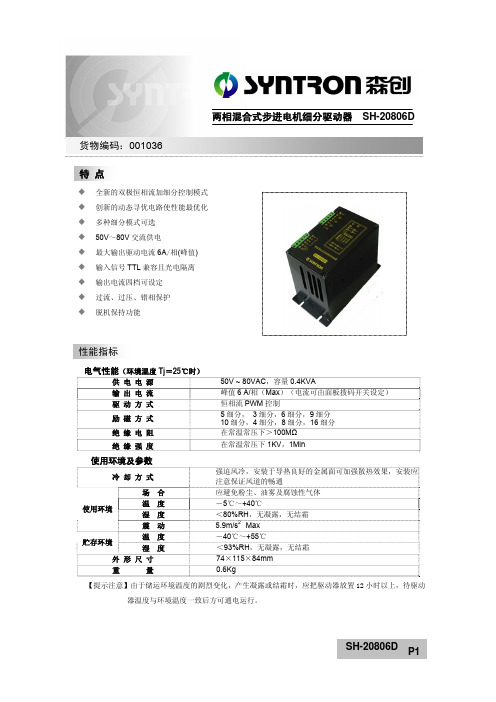
供 电 电 源
50V ~ 80VAC ,容量0.4KVA
输 出 电 流 峰值6 A/相(Max )(电流可由面板拨码开关设定) 驱 动 方 式 恒相流PWM 控制
励 磁 方 式 5细分, 3细分,6细分,9细分 10细分,4细分,8细分,16细分 绝 缘 电 阻 在常温常压下>100M Ω 绝 缘 强 度
在常温常压下1KV ,1Min
冷 却 方 式
强迫风冷,安装于导热良好的金属面可加强散热效果,安装应注意保证风道的畅通
场 合 应避免粉尘、油雾及腐蚀性气体 温 度 -5℃~+40℃
湿 度 <80%RH ,无凝露,无结霜 使用环境
震 动 5.9m/s 2 Max 温 度
-40℃~+55℃
贮存环境
湿 度
<93%RH ,无凝露,无结霜
外 形 尺 寸 74×115×84mm 重 量
0.6Kg
特 点 性能指标 适应性宽,可靠性高,灵活性大 两相混合式步进电机细分驱动器 货物编码:001036
功能及使用
SH-20806D 输入信号
典型接线图
外形尺寸
注意
畅通,没有遮挡物,设备的通风
良好,并定期检查散热风扇运转
是否正常;机柜内有多个驱动器
并列使用时要保证相互之间的
距离不小于。
森创 SH-21006C 两相混合式步进电机细分驱动器 说明书

通过面板第 2 位拨码开关可以选择驱动器输出的相电流,第 2 位为‘ON’时输出相电流为有效值 4A, 为‘OFF’时输出相电流为有效值 6A。
改善半步
本驱动器采用改善半步运行模式。驱动整步步距角 1.8 度的两相电机时可实现每步 0.9 度的分辨率, 即 400 步/转。在这一点上与标准半步运行方式相同,但是由于采用了力矩补偿技术,可以提高电机的 低速力矩(理论上最大可以提升 40%),并且可有效解决相邻两拍之间的力矩波动,即强弱步问题, 使电机的加速性和平稳性得到改善。对于不同的电机由于其电感电阻参数的差异改善的效果不尽相同, 对于高速运行(一般 500 转/分以上),采用改善半步和标准半步差别不大。
SH-21006C P2
SH-21006C
输入输出信号
驱动器的输入信号Βιβλιοθήκη 子采用可拔插的端子,可以先将其拔下,接好线后再插上。
公共端
脉冲信号输入 方向信号输入 脱机信号输入 报警信号输出
本驱动器的输入信号采用共阳极接线方式,用户应将控制信号的正电源连接到该端子上, 信号输出线连接到相应的信号端子上,当信号输入端出现低电平时相对应的内部光耦开 通,将信号输入驱动器中。当用户系统的信号无法提供共阳接线方式时,需要另做转换接 口的电路与之匹配,也可以和我们联系,使用本公司的信号转换模块解决。
使用环境及参数
冷却方式
场合
使用环境
温度 湿度
震动
保存温度
外形尺寸
重量
强迫风冷 (当输出相电流 6A 时) 尽量避免粉尘、油雾及腐蚀性气体 0℃ ~ +50℃ <80%RH,无凝露,无结霜 5.9m/s2 Max -20℃ ~ +65℃ 180×115×72mm
东方电机公司2相步进电机和驱动器包装CSK系列说明书

ORIENTAL MOTORGENERAL CATALOG2-PHASE STEPPING MOTOR AND DRIVER PACKAGECSK SeriesFeatures·····························································B-234Standard Type····················································B-238High-Resolution Type·········································B-243SH Geared Type·················································B-248List of Motor and Driver Combinations···············B-253Wiring Diagram···················································B-254Switching and Setting Functions························B-255Adjusting the Output Current······························B-2552-PHASE STEPPING MOTOR AND DRIVER PACKAGECSK SeriesGEAR PLCDIRECTRE -GENER -ATION PACK - AGE DC INPUT1.High TorqueThe CSK high-torque 2-phase stepping motor series combines the PK series of 2-phase high-torque motors. The maximum holding torque values are as follows:CSK24Ⅺ: 22.2 oz-in (0.16N •m) ϳ44.4 oz-in (0.32N •m)CSK26Ⅺ:54.1 oz-in (0.39N •m) ϳ187 oz-in (1.35N •m)2.Powerful SH Geared TypeThe product line for the CSK series also includes the SH geared type that provides high torques. There are six gear ratios: 3.6:1, 7.2:1, 9:1, 10:1, 18:1, and 36:1.3.High-Resolution TypeThe product line for the CSK series also includes high-resolution types for which the basic step angle (1.8Њ/step) for the two-phase stepping motors is cut in half to 0.9Њ/step (for full steps).The resolution is doubled from 200 steps per revolution for standard types to 400 steps per revolution. The high-resolution type can be run in half-step mode to provide 800 steps per revolution.pact DriverThe drivers produce a high output of 2A/phase for 24V/36V DC. None the less, they are compact in size W 2.64 in.(67mm) ϫ D 2.83 in. (72mm) ϫ H 1.22 in. (31mm), due to a custom IC, surface mount technology and FET output stage.5.Expanded control functionsThese motors are equipped with an “Automatic Current Cutback ” function and “Excitation Timing ” output, which is handy for detecting the mechanical home position of the device.Furthermore, internal switches can set the step angle and pulse type.6.Simple and reliable connectionsIndependent connectors are used for the driver input/output signals and the motor output lines.7.Highly reliable photocoupler inputⅢCSK SERIES SYSTEM CONFIGURATION A compact stepping motor and driver are combined to make possible high-precision positioning with open loop control.2-Phase Stepping MotorCSK Series Standard Type(Full Step Angle 1.8˚)Page B-238Two sizes are available: the CSK24Ⅺ with a 1.65 inch (42mm)square mounting and the CSK26Ⅺwith a 2.22 inch (56.4mm)square mounting.CSK Series High-Resolution Type(Full Step Angle 0.9˚) PageB-243CSK high-resolution type has a full step angle of 0.9˚ (400 perrevolution).Two sizes are available: the CSK24ⅪM with a 1.65 inch(42mm) square mounting and the CSK26ⅪM with a 2.22 inch(56.4mm) square mounting.CSK Series SH Geared TypePage B-248Six gear ratios are available: 3.6:1, 7.2:1, 9:1, 10:1, 18:1 and 36:1.The low ratios allow the gear shaft speed to be reduced without reducing the speed of the motor too much, thus enabling more precise resolution and smoother rotation at low speed.ⅢSPECIFICATIONSSTANDARD TYPE (Full Step Angle 1.8°)motor torque performance. When using the motor with the dedicated driver, the driver's “Automatic Current Cutback ” function at motor standstill reduces maximum holding torque by approximately 40%.●The power source input current value represents the maximum current. (The input current varies according to the pulse frequency.)✽Responds up to approximately 10 kHz with a pulse duty of 50%. When using it at higher speeds, narrow the pulse width (shorten the photocoupler ’s ON time.)CSK 2 4 5 -A T AⅢPRODUCT NUMBER CODEShaft Type A : Single ShaftB : Double Shaft Motor Case Length2-phaseCSK seriesMotor Frame Size 4: 1.65 in. (42mm) sq.6:2.22 in. (56.4mm) sq.USA VersionTerminal Block TypeCSK243-BTANote:CSK244-BTACSK245-BTA●DC24V CSK243-BTACSK244-BTACSK245-BTA●DC36VT o r q u e [o z -i n ]T o r q u e [N ·m ]3.02.52.01.51.00.5 0D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](15)(150)(1500)(Half Step )0.300.250.200.150.100.050T o r q u e [o z -i n ]T o r q u e [N ·m ]3.02.52.01.51.00.5D r i v e r I n p u t C u r r e n t [A ]L 2(–72)Speed [r/min ](15)(150)(1500)(Half Step )0.300.250.200.150.100.050T o r q u e [N ·m ]3.02.52.01.51.00.5 0D r i v e r I n p u t C u r r e n t [A ]2(–72)Speed [r/min ](15)(150)(1500)(Half Step )T o r q u e [N ·m ]3.02.52.01.51.00.5 0D r i v e r I n p u t C u r r e n t [A ]L 2(–72)Speed [r/min ](15)(150)(1500)(Half Step )T o r q u e [N ·m ]3.02.52.01.51.00.5 0D r i v e r I n p u t C u r r e n t [A ]2(–72)Speed [r/min ](15)(150)(1500)(Half Step )T o r q u e [N ·m ]3.02.52.01.51.00.5D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](15)(150)(1500)(Half Step )CSK264-BTCSK266-BTCSK268-BT●DC24V CSK264-BTCSK266-BTCSK268-BT●DC36VT o r q u e [N ·m ]3.02.52.01.51.00.5 0D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](15)(150)(1500)(Half Step )T o r q u e [N ·m ]3.02.52.01.51.00.5D r i v e r I n p u t C u r r e n t [A ]L 2(–72)Speed [r/min ](15)(150)(1500)(Half Step )T o r q u e [N ·m ]3.02.52.01.51.00.5 0D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](15)(150)(1500)(Half Step )T o r q u e [N ·m ]3.02.52.01.51.00.5D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](15)(150)(1500)(Half Step )T o r q u e [N ·m ]3.02.52.01.51.00.5 0D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](15)(150)(1500)(Half Step )T o r q u e [N ·m ]3.02.52.01.51.00.5D r i v e r I n p u t C u r r e n t [A ]L 2(–72)Speed [r/min ](15)(150)(1500)(Half Step )Note:●MotorⅢDIMENSIONS scale 1/4, unitסinch (mm)CSK243-ATA(Single shaft)Motor Model: PK243-01AA Weight 0.47lb. (Mass 0.21kg) CSK243-BTA(Double shaft)Motor Model: PK243-01BA Weight 0.47lb. (Mass 0.21kg) CSK244-ATA(Single shaft)Motor Model: PK244-01AA Weight 0.6lb. (Mass 0.27kg) CSK244-BTA(Double shaft)Motor Model: PK244-01BA Weight 0.6lb. (Mass 0.27kg) CSK245-ATA(Single shaft)Motor Model: PK245-01AA Weight 0.78lb. (Mass 0.35kg) CSK245-BTA(Double shaft)Motor Model: PK245-01BA Weight 0.78lb. (Mass 0.35kg)CSK264-AT(Single shaft)Motor Model: PK264-02A Weight 1lb. (Mass 0.45kg) CSK264-BT(Double shaft)Motor Model: PK264-02B Weight 1lb. (Mass 0.45kg) CSK266-AT(Single shaft)Motor Model: PK266-02A Weight 1.55lb. (Mass 0.7kg) CSK266-BT(Double shaft)Motor Model: PK266-02B Weight 1.55lb. (Mass 0.7kg) CSK268-AT(Single shaft)Motor Model: PK268-02A Weight 2.21lb. (Mass 1kg) CSK268-BT(Double shaft)Motor Model: PK268-02B Weight 2.21lb. (Mass 1kg)✽.59Ϯ.01 (15Ϯ0.25) indicates the length of milling on motor shaft.● These external appearance drawings are for double shaft models. For a single. 2 5 0 0 D I A .1).25DIA.)).25DIA.✽.59Ϯ.01 (15Ϯ0.25) indicates the length of milling on motor shaft.✽.59Ϯ.01 (15Ϯ0.25) indicates the length of milling on motor shaft.ⅢDIMENSIONS scale 1/4, unitסinch (mm)●DriverDriver: CSD2109-T(For CSK243model)CSD2112-T(For CSK244and CSK245 models)CSD2120-T(For CSK264, CSK266 and CSK268 models) Weight: 0.29lb. (Mass 0.13kg).13DIA. ( 3.2)See page B-38 for information on driver installation.HIGH-RESOLUTION TYPE (Full Step Angle 0.9°)CSK 2 4 5 M A T AⅢPRODUCT NUMBER CODEShaft Type A : Single ShaftB : Double Shaft Motor Case Length2-phaseCSK seriesMotor Frame Size 4: 1.65 in. (42mm) sq.6:2.22 in. (56.4mm) sq.USA VersionTerminal Block TypeHigh-Resolution Type●Maximum holding torque refers to the holding torque at motor standstill when the rated current is supplied to the motor (2 phase excitation). Use this value to compare motor torque performance. When using the motor with the dedicated driver, the driver's "Automatic Current Cutback" function at motor standstill reduces maximum holdingⅢSPEED vs. TORQUE CHARACTERISTICS fs : Maximum Starting Pulse RateCSK243MBTACSK244MBTACSK245MBTA●DC24V CSK243MBTACSK244MBTACSK245MBTA●DC36VT o r q u e [o z -i n ]T o r q u e [N ·m ]3.02.52.01.51.00.5 0D r i v e r I n p u t C u r r e n t [A ]2(–72)Speed [r/min ](7.5)(75)(750)(Half Step )0.300.250.200.150.100.05T o r q u e [o z -i n ]T o r q u e [N ·m ]3.02.52.01.51.00.5D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](7.5)(75)(750)(Half Step )0.300.250.200.150.100.050T o r q u e [o z -i n ]T o r q u e [N ·m ]2.01.51.00.5 0D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](7.5)(75)(750)(Half Step )0.300.250.200.150.100.050T o r q u e [o z -i n ]T o r q u e [N ·m ]2.01.51.00.5D r i v e r I n p u t C u r r e n t [A ]L 2(–72)Speed [r/min ](7.5)(75)(750)(Half Step )0.300.250.200.150.100.05T o r q u e [o z -i n ]T o r q u e [N ·m ]2.01.51.00.5 0D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](7.5)(75)(750)(Half Step )0.300.250.200.150.100.050T o r q u e [o z -i n ]T o r q u e [N ·m ]2.01.51.00.5D r i v e r I n p u t C u r r e n t [A ]2(–72)Speed [r/min ](7.5)(75)(750)(Half Step )0.300.250.200.150.100.05Note:CSK264MBTCSK266MBTCSK268MBT●DC24V CSK264MBTCSK266MBTCSK268MBT●DC36VT o r q u e [o z -i n ]T o r q u e [N ·m ]2.01.51.00.5 0D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](7.5)(75)(750)(Half Step )0.60.50.40.30.20.10T o r q u e [o z -i n ]T o r q u e [N ·m ]2.01.51.00.5D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](7.5)(75)(750)(Half Step )0.60.50.40.30.20.1T o r q u e [o z -i n ]T o r q u e [N ·m ]2.01.51.00.5 0D r i v e r I n p u t C u r r e n t [A ]2(–72)Speed [r/min ](7.5)(75)(750)(Half Step )1.21.00.80.60.40.20T o r q u e [o z -i n ]T o r q u e [N ·m ]2.01.51.00.5D r i v e r I n p u t C u r r e n t [A ]2(–72)Speed [r/min ](7.5)(75)(750)(Half Step )1.21.00.80.60.40.2D r i v e r I n p u t C u r r e n t [A ]L 2(–72)Speed [r/min ](7.5)(75)(750)(Half Step )D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](7.5)(75)(750)(Half Step )Note:ⅢDIMENSIONS scale 1/4, unitסinch (mm)●MotorCSK243MATA(Single shaft)Motor Model: PK243MAA Weight 0.47lb. (Mass 0.21kg) CSK243MBTA(Double shaft)Motor Model: PK243MBA Weight 0.47lb. (Mass 0.21kg) CSK244MATA(Single shaft)Motor Model: PK244MAA Weight 0.6lb. (Mass 0.27kg) CSK244MBTA(Double shaft)Motor Model: PK244MBA Weight 0.6lb. (Mass 0.27kg) CSK245MATA(Single shaft)Motor Model: PK245MAA Weight 0.78lb. (Mass 0.35kg) CSK245MBTA(Double shaft)Motor Model: PK245MBA Weight 0.78lb. (Mass 0.35kg)CSK264MAT(Single shaft)Motor Model: PK264MA Weight 1lb. (Mass 0.45kg) CSK264MBT(Double shaft)Motor Model: PK264MB Weight 1lb. (Mass 0.45kg) CSK266MAT(Single shaft)Motor Model: PK266MA Weight 1.55lb. (Mass 0.7kg) CSK266MBT(Double shaft)Motor Model: PK266MB Weight 1.55lb. (Mass 0.7kg) CSK268MAT(Single shaft)Motor Model: PK268MA Weight 2.21lb. (Mass 1kg) CSK268MBT(Double shaft)Motor Model: PK268MB Weight 2.21lb. (Mass 1kg)✽.59Ϯ.01 (15Ϯ0.25) indicates the length of milling on motor shaft.. 2 5 0 0 D I A .1).25DIA.)1).25DIA.✽.59Ϯ.01 (15Ϯ0.25) indicates the length of milling on motor shaft.✽.59Ϯ.01 (15Ϯ0.25) indicates the length of milling on motor shaft.●DriverDriver: CSD2109-T(For CSK243M model)CSD2112-T(For CSK244M and CSK245M models)CSD2120-T(For CSK264M, CSK266M and CSK268M models) Weight: 0.29lb. (Mass 0.13kg).13DIA. ( 3.2)See page B-38 for information on driver installation.●Maximum holding torque refers to the holding torque at motor standstill when the rated current is supplied to the motor (2 phase excitation). Use this value to compare motor torque performance. When using the motor with the dedicated driver, the driver's “Automatic Current Cutback ” function at motor standstill reduces maximum holding torque by approximately 40%.●The power source input current value represents the maximum current. (The input current varies according to the pulse frequency.)●Permissible torque is the maximum value of the mechanical strength of the gear unit. Use the product with a total torque (load and acceleration) less than the permissible torque.ⅢSPECIFICATIONSSH GEARED TYPECSK 2 6 4 A T A -SG 10ⅢPRODUCT NUMBER CODEShaft Type A : Single ShaftB : Double ShaftMotor Case Length2-phaseCSK seriesMotor Frame Size 4: 1.65 in. (42mm) sq.6:2.22 in. (56.4mm) sq.USA VersionTerminal Block TypeSG : SH Geared TypeGear Ratio●Maximum holding torque refers to the holding torque at motor standstill when the rated current is supplied to the motor (2 phase excitation). Use this value to compare motor torque performance. When using the motor with the dedicated driver, the driver's "Automatic Current Cutback" function at motor standstill reduces maximum holding torque by approximately 40%.●The power source input current value represents the maximum current. (The input current varies according to the pulse frequency.)●Permissible torque is the maximum value of the mechanical strength of the gear unit. Use the product with a total torque (load and acceleration) less than the permissible torque.ⅢSPEED vs. TORQUE CHARACTERISTICSCSK243BTA-SG3.6CSK243BTA-SG7.2CSK243BTA-SG9CSK243BTA-SG10CSK243BTA-SG18CSK243BTA-SG36ⅢPRECAUTIONSWhen using the CSK SH geared type, please note the following:1.Do not exceed the maximumpermissible torque:Permissible torque represents the maximum value of themechanical strength of the gear unit. Be sure to keep the total 2.Do not exceed the permissible speedrange:Do not exceed the maximum output speed of the gearhead indicated in the specifications on page B-248, 249. The speedT o r q u e [N ·m ]1.41.21.00.80.60.40.20D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](4.16)(41.6)(416)(Half Step )T o r q u e [N ·m ]1.41.21.00.80.60.40.20D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](2.08)(20.8)(208)(Half Step )T o r q u e [N ·m ]1.41.21.00.80.60.40.20D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](1.66)(16.6)(166)(Half Step )T o r q u e [N ·m ]1.41.21.00.80.60.40.2D r i v e r I n p u t C u r r e n t [A ]2(–72) Speed [r/min ](0.83)(8.33)(83.3)(Half Step )T o r q u e [N ·m ]1.41.21.00.80.60.40.20D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](0.41)(4.16)(41.6)(Half Step )T o r q u e [N ·m ]1.41.21.00.80.60.40.2D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](1.5)(15)(150)(Half Step )fs : Maximum Starting Pulse RateNote:●Pay attention to heat dissipation from motor and driver. The motor will produce a considerable amount of heat under certain conditions. Be sure to keep the temperature of the motor case under 212˚F (100˚C).● When using the motor with the dedicated driver, the driver's "Automatic Current Cutback" function at motor standstil reduces maximum holding torque by approximately 40%.CSK264BTA-SG3.6CSK264BTA-SG7.2CSK264BTA-SG9CSK264BTA-SG10CSK264BTA-SG18CSK264BTA-SG36D r i v e r I n p u t C u r r e n t [A ]2(–72)Speed [r/min ](4.16)(41.6)(416)(Half Step )D r i v e r I n p u t C u r r e n t [A ]2(–72)Speed [r/min ](2.08)(20.8)(208)(Half Step )D r i v e r I n p u t C u r r e n t [A ]2–72 Speed [r/min ](1.66)(16.6)(166)(Half Step )D r i v e r I n p u t C u r r e n t [A ]2(–72) Speed [r/min ](0.83)(8.33)(83.3)(Half Step )D r i v e r I n p u t C u r r e n t [A ]2(–72)Speed [r/min ](0.41)(4.16)(41.6)(Half Step )D r i v e r I n p u t C u r r e n t [A ]2(–72)Speed [r/min ](1.5)(15)(150)(Half Step )4.The direction of gear shaft rotationsdiffers according to reduction ratios:The direction of motor shaft rotation and gear shaft rotation according to the gear ratio applied:3.Consider backlash in bi-directionalpositioning:Backlash is the free rotation angle (i.e., play) of the output shaft when the input section of the reduction gear is fixed. If there is a Note:●Pay attention to heat dissipation from motor and driver. The motor will produce a considerable amount of heat under certain conditions. Be sure to keep the temperature of the motor case under 212˚F (100˚C).● When using the motor with the dedicated driver, the driver's "Automatic Current Cutback" function at motor standstil reduces maximum holding torque by approximately 40%.CSK243ATA-SG Ⅺ(Single shaft)Motor Model: PK243A1A-SG ⅪWeight 0.78lb. (Mass 0.35kg)CSK243BTA-SG Ⅺ(Double shaft)Motor Model: PK243B1A-SG ⅪWeight 0.78lb. (Mass 0.35kg)CSK264ATA-SG Ⅺ(Single shaft)Motor Model: PK264A2A-SG ⅪWeight 1.66lb. (Mass 0.75kg)CSK264BTA-SG Ⅺ(Double shaft)Motor Model: PK264B2A-SG ⅪWeight 1.66lb. (Mass 0.75kg)✽.59Ϯ.01 (15Ϯ0.25) indicates the length of milling on motor shaft.See page B-36 for information on motor installation.ⅷScrews (included)4-No.4-40 UNC. length .39 (10)ⅷScrews (included)4-No.8-32 UNC. length .59 (15).1968 D I A .0.2500 D I A .[1/4"]●DriverDriver : CSD2109-T (For CSK243-SG model)CSD2120-T (For CSK264-SG model)Weight: 0.29lb. (Mass 0.13kg).13 DIA. ( 3.2)●MotorⅢDIMENSIONS scale 1/4, unit סinch (mm)● shaft, ignore the colored areas.Enter A(single shaft) or B(double shaft) in the Ⅺwithin the model numbers.ⅢWIRING DIAGRAMⅢINPUT/OUTPUT SIGNALSⅢPower Supply2-Phase Stepping Motor●Pulse Input1-Pulse Input Mode Pulse Signal"Pulse" signal is input to the PULSE/CW Ϫterminal. When the photocoupler state changes from "ON" to "OFF", the motor rotates one step. The direction of rotation is determined by the following rotation direction signal.Rotation Direction SignalThe "Rotation Direction" signal is input to theDIR./CCW Ϫterminal. A "photocoupler ON" signal input commands a clockwise direction rotation. A "photocoupler OFF" signal input commands a counterclockwise direction rotation.2-Pulse Input Mode CW Pulse Signal"Pulse" signal is input to the PULSE/CW Ϫterminal. When the photocoupler state changes from "ON" to "OFF", the motor rotates one step in a clockwise W Pulse Signal"Pulse" signal is input to the DIR./CCW Ϫterminal. When the photocoupler state changes from "ON" to "OFF", the motor rotates one step in a counterclockwise direction.●All Windings Off (C.OFF) InputWhen the "All windings Off" (C.OFF) signal is in the"photocoupler ON" state, the current to the motor is cut off and motor torque is reduced to zero. The motor output shaft can then be rotated freely by hand.This signal is used when moving the motor by external force or manual home position is desired.●Excitation-Timing (TIMING) OutputThe signal is output once each time the excitation sequence returns to step "0" in synchronization with input pulses. The excitation sequence is designed to complete electrical one cycle as the motor shaft rotates 7.2˚. A signal is output every 4 pulses in full step mode (1.8˚/step) and every 8pulses in half step mode (0.9˚/step).Use a power supply that can supply sufficient input current.When power supply capacity is insufficient, a decrease in motor output can cause the following malfunctions:●Motor does not rotate properly at high-speed (insufficient torque)●Motor startup and stopping is slow.Use connector TB1 and TB2 when connecting.Note:●Keep the voltage Vo 1and Vo 2between DC 5V and DC 24V. When they are equal to DC 5V, the external resistances R 1and R 2are not neccessory. When they are above DC 5V, connect R 1to keep the current below 20mA, and connect R 2to keep the current below 10mA.●Use twisted-pair wire of 3.1ϫ10-4 in 2(0.2mm 2) or thicker and 6.6 feet (2m) or iess in length for the signal line.●Use wire 7.8ϫ10-4 in 2(0.5mm 2) or thicker for motor lines (when extended) and power supply lines, and use 1.2ϫ10-3 in 2(0.75mm 2) or thicker for the wire for the grounding line.●Use spot grounding for the grounding of the driver and external controller. ●Signal lines should be kept away at least 3.94 in. (10cm) from power lines(power supply lines and motor lines). Do not bind the signal line and power line together.ⅢTIMING CHARTCW Motor CCWPulseAll Windings Off Input ON OFFON OFFON OFFDirection✽1 It is recommended to wait a period of time to allow the motor oscillations toend before inputting the "All windings Off" signal. This time varies with the load inertia, the load torque and the starting pulse rate, Signal input must be stopped before the motor stops.✽2 Never input a step pulse signal immediately after switching the "All windingsOff" signal to the “photocoupler ON ” state or the motor may losesynchronism. In general, an interval of 100ms (minimum) is required.Response up to about 10 kHz with a pulse duty of 50%. When using it at higher speeds, narrow the pulse width.2. Adjusting the Motor Operating CurrentTo set the "Automatic Current Cutback" function to inactive (SW1:OFF):(1) Adjust the motor operating current with the RUNpotentiometer. It can be adjusted from 0.3A/phase to the rated value of the driver.(2) The motor operating current is set for the rated current at the time of shipping. The RUN potentiometer can be used lower the operating current to reduce temperature rise in the motor/driver, adjust torque margin and reduce vibration.ⅢSWITCHING AND SETTING FUNCTIONS 3. Adjusting The Current At Motor StandstillT o set the "Automatic Current Cutback" function to active (SW1:ON):(1) Adjust the current at motor standstill with the STOPpotentiometer. It can be adjusted from 25% to 40% of the run operating current (0.3A minimum).(2) At the time of shipping, the current at motor standstill is set for 40%. The STOP potentiometer readjusts the current to the value required to produce enough holding torque.(1) Automatic Current Cutback at motor standstill When switch 1 (ACD) is set to ON, the "Automatic CurrentCutback" function at motor standstill is active. Approximately 0.1seconds after input pulses stop, the motor output current is automatically lowered to suppress heat generation in the motor and driver. Generally, the switch should be in the ON position. (If the switch is set to OFF , the "Automatic Current Cutback"function at motor standstill is disabled.)(2) Step Angle Standard Type:When switch 2 (F/H) is set to ON, the driver is set for 1.8˚/step (200 steps per revolution. When the switch is set to OFF , the driver is set for 0.9˚/step (400 steps per revolution). High-Resolution Type:When switch 2 (F/H) is set to ON, the driver is set for 0.9˚/step (400 steps per revolution). When the switch is set to OFF , the driver is set for 0.45˚/step (800 steps per revolution).(3) Pulse Input ModeThe driver is designed to function under either of the following two pulse output modes on the user ’s controller:●When switch 3 (1P/2P) is set to OFF , the driver is set for the 2-pulse input mode, in which two types of pulse signal (one each for CW and CCW) are used to control the motor.●When switch 3 (1P/2P) is set to ON, the driver is set for the 1-pulse input mode, in which a pulse signal and a direction of rotation signal are used to control the motor.(4) Power Supply VoltageWhen using a 24V DC power supply, switch 4 (24/36V) should be ON. When using a 36V DC power supply, the switch should be OFF .ⅢADJUSTING THE OUTPUT CURRENT1.Adjustment MethodConnecting voltmeterInsert voltmeter test probes [approximately 0.18 in. diameter (2.1mm)] as shown below.The current value for one phase is equivalent to the voltage shown by the voltmeter. (ex : voltmeter voltage 1V=1A/Phase)Note :The motor Run current should be less than the motor rated current.Holding Torque ϭRated Holding Torque ϫCurrent at MotorStandstill [A]Motor Rated Current [A]RED (ϩ)BLACK (Ϫ)C.C.ϩ C.C.ϪRUN VR STOR VR。
博世86中文说明书.

使用说明—————————————沙楷——————————————感谢您对博世产品的购买。
你所选购的是一个现代化的优质家用设备。
您可以在我们的网站上找到关于我们产品的更进一步的信息。
该产品可用于在家中加工适量的食物或用于加工非工业方面的类似数量的食物。
非工业方面的应用包括以下几种,例如:在店铺的职工厨房、办公室、农业或其他商务场所中,也包括在寄宿家庭、小旅馆和类似的住宅中。
该产品用于在家中加工适量的食物。
所放入食物不要超过最大额定数量。
请认真阅读说明书并将其妥善保管。
若用户未按照说明书中的正确使用方法操作该产品,生产商拒绝对其产生的不良后果负责。
如果将该产品转让给第三方,请务必将说明书一同转交。
该产品免费保修。
该说明书介绍了产品的多种模式。
安全说明!小心电击请按照铭牌上的详细信息接通电源。
仅能在室内使用该设备。
如果连接线或者器械损坏,请勿使用。
避免儿童接触该设备。
除非在监护人的监护或指导下,否则禁止身体感官或精神受限的以及缺乏操作经验的人使用该设备。
在清理设备或离开房间时,务必要切断将设备的电源,否则会出现问题。
在设备运行时,不要走开。
不要将电源线放在锋利的边缘或很热的表面。
为了避免受伤,用户必须请生产商、售后人员或类似的有资格的人更换损坏的电源线。
只有我们的售后中心可以修理该设备。
手不要靠近设备中旋转的部分。
安全起见,该设备只能在安装好安全设施之后使用(11,12,13)设备运行时,请勿调整旋转臂。
只有设备停止转动后,方可调整。
在设备停止运行之前,请勿更换工具——切断电源后,该设备仍会继续旋转一段时间。
不要把底座浸在水中或用流动的水清洗。
只能用原装配件操作该设备。
当用原装配件时,请遵守附上的操作说明。
Included in standard delivery见表格fig.16概述请翻到标明的页码1 开关2配件/工具3 旋钮4 盖子5 有盖的进料管6 不锈钢搅拌碗7 搅棒8 搅拌器9 揉面钩与倒流板10 用于混合的容器11 工具的盖子12 电机的盖子13 混合器的盖子工具的驱动装置fig.22a 混合器和多叶混合器的电机2b 搅棒、搅拌器、揉面钩的驱动,碎肉机2c 磨面机、连续粉碎机和榨汁机的电机操作的位置!注意在操作该设备之前,将工具和相应的驱动按正确的方式连接在一起,并根据桌子的情况将其放在合适的位置。
步进电机及驱动器
外型尺寸
Figure
L
L1
64
20
75
37
113
37
151
37
接线图:
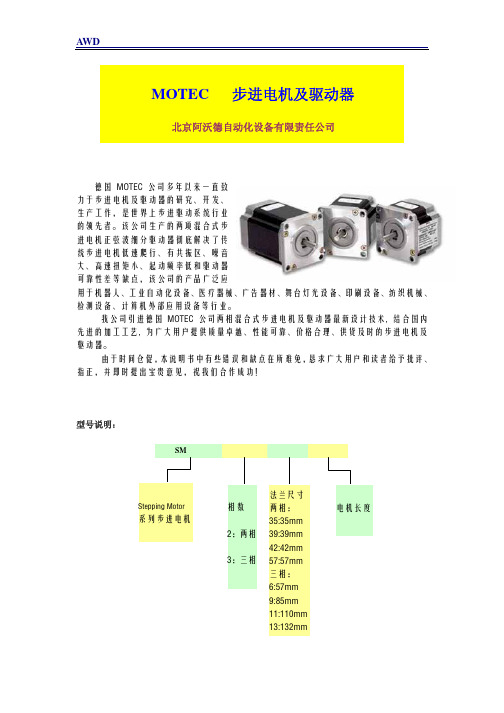
AWD
MOTEC 两相混合式步进电机正弦波细分驱动器
德国 MOTEC 公司生产的两项混合式步进电机正弦 波细分驱动器彻底解决了传统步进电机低速爬行、有共 振区、噪音大、高速扭矩小、起动频率低和驱动器可靠 性差等缺点,我公司引进其先进的技术,生产出性能更 加优越的步进电机驱动器。
电阻
Model Voltage(V) Current(A) Resistance
SM242-26
8
0.4
20
SM242-34 13.2
0.6
22
SM242-40
3.5
1.4
2.5
SM242-48
2.4
2.4
1
SM242-52
8
0.85
9.3
静力矩
Holding torque (Nm)
0.18 0.35 0.46 0.48 0.55
ON:双脉冲:PU 为正向步进脉冲信号,DR 为反向步进脉冲信号 D4
OFF:单脉冲:PU 为步进脉冲信号,DR 为方向控制信号
D5 自检测开关(OFF 时接收外部脉冲,ON 时驱动器内部发 7.5KHz 脉冲)
DIP 功能设定
OFF,双脉冲:PU 为正向步进脉冲信号,DR 为反向步进脉冲信号 DP3
电流
电阻
Model Voltage(V) Current(A) Resistance
SM235-26
3.6
0.8
4.5
SM235-28
SMD86静音型开环步进驱动器使用说明书

宁波纳川自动化科技有限公司 地 址:宁波市北仑区莫干山路36号 销售热线:代理洽谈:技术支持: 网 址:广州办事处:广东省广州市天河区汇德商业佛山办事处:广东省佛山市大沥镇苏州办事处:苏州市吴中区木渎镇联东U 谷 昆山办事处:江苏省昆山市玉山镇 丽水办事处:浙江省丽水市绿谷大道 温州办事处:浙江省温州市交行广场 丽水办事处:浙江省丽水市绿谷大道SMD86静音型开环步进驱动器使用说明书版本v1.1版 权 所 有不 得 翻 印【使 用 前 请 仔 细 阅 读 本 手 册,以 免 损 坏 驱 动 器】目录一、产品简介......................................................................................................................... - 2 -1.1概述.......................................................................................................................... - 2 -1.2特点.......................................................................................................................... - 2 -1.3应用领域................................................................................................................. - 2 -二、电气、机械和环境指标 ............................................................................................. - 3 -2.1电气指标................................................................................................................. - 3 -2.2使用环境和参数................................................................................................... - 3 -2.3机械安装尺寸图................................................................................................... - 3 -2.4散热方式................................................................................................................. - 3 -三、驱动器接口和接线介绍 ............................................................................................. - 3 -3.1接口描述................................................................................................................. - 3 -3.2控制信号时序图................................................................................................... - 4 -3.3控制信号接口图................................................................................................... - 4 -3.4接线要求................................................................................................................. - 5 -四、电流、细分拨码开关设定和附加功能设定 ........................................................ - 5 -4.1动态电流设定........................................................................................................ - 5 -4.2每转脉冲数设定................................................................................................... - 5 -4.3附加功能设定........................................................................................................ - 6 -4.4内部脉冲模式速度设定 ..................................................................................... - 6 -五、供电电源选择................................................................................................................ - 6 -六、电机选配......................................................................................................................... - 6 -6.1电机选配................................................................................................................. - 6 -6.2电机接线................................................................................................................. - 7 -6.3输入电压和输出电流的作用............................................................................ - 7 -七、典型接线案例................................................................................................................ - 7 -八、指示灯状态显示........................................................................................................... - 8 -九、常见问题......................................................................................................................... - 8 -十、纳川产品保修条款....................................................................................................... - 9 -SMD86数字式两相步进驱动器一、产品简介1.1 概述SMD86是纳川步进新推出静音型开环步进驱动器,采用了伺服电机FOC算法,完美解决步进电机静止噪音和低速振动问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4
5.5 0.42 3.5
45
1400
1.2
39.4 11.1 2.9 4.8 133.2 12.1 53.1 3.0 16.2 39.9
3
9.7 133.2
116 7.5
6 0.5 6
85 2700 2.4 24.3 53.1 4.5
10
32.4 39.9
E 输入转速高于400rpm时可能会出现力矩下降的情况。
0 0
600
1200
1800
2400
[rpm]
JHSTM86ʵ1.8ʵSʵ78
3.5
测试条件:48VDC;5.4A/相,整步
2.8
力矩 [Nm]
2.1
1.4
0.7
0 0
600
1200
1800
2400
[rpm]
JHSTM86ʵ1.8ʵSʵ116
9.5
测试条件:100VAC;6A/相,整步
7.6
力矩 [Nm]
步进电机 定位力矩 (kgf·cm)
输入转速为400rpm时
输出转矩 输出转速 (N·m) (rpm)
重量 (kg)
3
3.6 133.2
65
7.5 10
5.9 0.29 1.7
33
1000
0.8
9.1 12.1
53.1 2.4 39.9
S JHSTM86 1.8 (单轴
输出)
78
36 3 7.5 10
Order
型式 ʵ 步距角 ʵ 输出轴数 ʵ 机身长度 ʵ 减速比
订货范例 JHSTM86 ʵ 1.8 ʵ
S
ʵ 78 ʵ 10
适用驱动器
DB2608MH (P.339)
Delivery 交货期
库存品
隔日上海发货 P.47 (17:00前订购的库存品可当日发货。)
技术咨询 021-6391-7750
Price 价格
■齿轮箱性能
减速比 减速级数
3
7.5
10
2
极限转矩
45N·m
效率
81%
回差
4度
E 正齿轮间隙较大,不适用于正反转场合。
■接线图
4线
红
M
白
36 3
73% 3.5度
■矩频曲线(仅步进电机,不考虑齿轮箱)
JHSTM86ʵ1.8ʵSʵ65
2.5
测试条件:48VDC;6A/相,整步
2
力矩 [Nm]
1.5
1
0.5
86シリーズ2相ギアボックス付ステッピングモータ -ステップ角1.8°-
86系列两相正齿轮箱大力矩混合式步进电机
步距角1.8°
库存
常州富兴机电有限公司 (品牌代码: FUX)
米思米原创型式 此页产品与厂家目录刊登型式不同,请使用米思米原创型式,向米思米订购产品。
4ʵM6
18 4h9
73.55ʶ0.2 90 П36 П12ʵ00.05 85.85
25
9.5
3
73.55ʶ0.2 90
32ʶ1
42(60)ʶ1
UL1332 AWG18#
L
E( )内为减速比36时的数值。
E 产品附带平行键。
型式
步距角 (度)
输出 轴数
L 电机机身
长度
减速比
引出线 (根)
电流/相 (A)
电阻/相 (Ω)
电感/相 (mH)
步进电机 保持力矩 (kgf·cm)
步进电机 转动惯量 (g·cm2)
5.7
3.8
1.9
0 0
300
600
900
[rpm]
黄
绿
无步 刷进 电电 机机 山洋 电气 富兴 机电
332
便捷询价
元 2 种方法
P.49Biblioteka ■规格步距角 输出轴数 步距角精度 电阻精度 电感精度 温升 环境温度 绝缘电阻 耐电压 径向间隙 mm 轴向间隙 mm 径向最大负载 轴向最大负载
1.8° 单轴 ʶ5%(整步,空载) ʶ10%(20℃) ʶ20%(1kHz) 80℃ max.(额定电流,2相通电) ʵ20℃ʙʴ50℃ 100MΩmin.,500VDC 820VAC,1s,3mA 0.02max.(450g负载) 0.08max.(450g负载) 220N(距法兰面20mm) 60N