数控4刀位自动回转刀架设计
数控车床自动回转刀架机电系统设计

数控车床自动回转刀架机电系统设计数控车床自动回转刀架是一种经常用于车削加工中的设备,其主要作用是在切削过程中快速更换刀具。
为了实现自动化操作,我们可以设计一个机电系统来控制刀架的回转动作。
下面是一个关于数控车床自动回转刀架机电系统设计的概述,其中包括系统的组成、工作原理以及关键技术。
一、机电系统组成1.电机:用于驱动刀架的转动,一般采用步进电机或伺服电机;2.传动装置:将电机的旋转运动转化为刀架的回转运动;3.可编程控制器(PLC):控制刀架的回转运动以及实现自动化操作;4.感应装置:用于检测刀架的位置,一般采用光电开关或接近开关;5.人机界面:用于人机交互的显示屏和按键。
二、工作原理1.工件加工:数控车床自动回转刀架机电系统安装在数控车床上,工作时根据加工工艺确定刀具的种类和数量,并将刀具安装在刀架上。
2.刀具选择:根据加工过程中所需的刀具类型,PLC通过人机界面接收到相关指令后,控制电机将刀架旋转至相应的刀具位置,光电开关或接近开关检测刀架是否到位。
3.切削过程:数控系统控制数控车床进行切削加工,当需要更换刀具时,PLC发送指令,电机带动刀架旋转至指定刀具位置,完成刀具的更换。
然后PLC再次发送指令,使数控车床继续进行切削加工。
4.刀具回收:加工结束后,刀架需要回到回收位置,等待下一次的切削操作。
三、关键技术1.传动装置设计:根据转速和转动力矩的要求,选择合适的传动方式(如齿轮传动、皮带传动等)来实现电机和刀架之间的动力传递及转动控制。
2.位置检测技术:光电开关或接近开关能够实现对刀架位置的准确检测,确保刀架到位后才能进行切削加工,提高工件加工的精度。
3.控制系统设计:PLC控制系统需要根据刀具种类和数量,编写相应的控制程序,实现自动化操作。
同时,可以根据需要增加串口或网络通信功能,方便与上位系统进行数据交互。
4.人机界面设计:人机界面需要简洁、直观、易用,使操作人员能够方便地进行刀具的选择和刀架的控制等操作。
数控车床四工位刀架原理及维修

障,恢复生产是我们 的期望。要做到这一点 ,我们必须 离)带动刀架体 1旋转 ,在刀架体旋转 的过程 中,由于
要总结经验 ,吃透原理 ,以便工作起来得心应手 。
弹簧 3l的作用使得粗定位销 13始终保持与刀架座 23接
在对几次数控车床四工位刀架维修后 ,笔者总结常 触 ,且粗定位销 l3只能沿 一个方 向公 转 ,粗 定位销在
刀架连续旋转找不见多由电路问题所致在实践中有以下几种可能磁性减弱表面吸附灰尘过多与灰尘混合形成一层隔膜使磁性减弱解决这种故障比较容易拆下磁铁架表面擦拭干净装上即好刀架在长时间工作后由于反复正反转有可能使螺纹压圈松动导致霍尔元件骨架实际为刀架定位槽与霍尔元件位置不匹配解决这种故障也比较容易松开螺纹压圈管脚断裂对于管脚没有封装的霍尔元件管脚断裂时有发生要求在刀架拆卸或保养要小心翼翼轻拿轻放避免利器碰撞管脚厂家针对以上问题已推出有封装的霍尔元件组件问题的解决已大有改观某刀号信号导线断裂仔细测量刀位信号导线刀架体磁铁架磁铁霍尔元件外罩0导线刀架轴螺纹压圈4霍尔元件骨架推力球轴承粗定位销螺杆下粗定位销0蜗轮刀架电动机中滑板4床鞍传动键联接螺钉刀架座轴承压盖蜗杆0轴承螺母弹簧上粗定位销刀架工作原理粗定位压盖刀架电动机有两个动作正转和反转其动作控制由霍尔元件来完成通过导线连接该导线为一个输入端一个输出端四个刀位信号动机得到信号后正转带动蜗杆转动并带动蜗轮冷加工设备与维修基于提高主轴回转精度的车床动力传动结构改进山东理工大学机械工程学院004主轴是机床的核心零件机床主轴的精度和特性可以用来评价机床本身的精度一般说来主轴的回转精度是衡量一台数控机床技术参数的一个关键指标安装工件或者刀具处的径向圆跳动量和端面圆跳动量有时也会涉及到主轴倾角运动的变化量回转精度通常是在无载荷的情况下通过手动或者低速机动主轴进行测量的在车床的主轴轴系中由于主轴一般用于安装工是工件的相对位置基准和运动基准其回转精度直接影响所加工零件的表面粗糙度和圆柱度等指标所以改善和控制主轴的回转精度使其确保工件的加工质是数控车床生产和改造的重要课题我公司自主研制生产的ak37型卧式车床问题会很快解决对于故障刀架卡死肯定由机械问题所致现在刀架处润滑不良由于加工中大量切削液飞溅气腐蚀使刀架内部各部分不能正常工作例如下推力球轴承磨损严重轴承滚珠滚道磨损或出现麻点需更换轴承弹簧失效或断裂影响粗定位或卡死需更换表面腐蚀或断裂滑销表面腐蚀影响螺上下导向使刀架卡死滑销断裂就不言而喻了以上对车床四工位刀架结构及原理进行了分析举了常见故障及处理方法除此之外日常保养对于刀架来说也很重要要做到每班将刀架清理干净定期给各滑动部分加润滑油以保证刀架寿命月份已研制生产了三代一直以来都能够满足公司的生产要求但近年来随着客户对加工工件精度要求的提高问题日渐显露针对该型号车床加工精度的提高问题列入攻关日
数控车床四工位自动回转刀架的工作原理
数控车床四工位自动回转刀架的工作原理引言:数控车床是一种高精度加工设备,广泛应用于机械加工行业。
四工位自动回转刀架是数控车床的重要组成部分,它能够实现在加工过程中刀具的自动更换,提高生产效率和加工精度。
本文将详细介绍数控车床四工位自动回转刀架的工作原理。
一、工作原理概述四工位自动回转刀架主要由刀架本体、伺服电机、刀杆、刀具等部分组成。
刀架本体安装在数控车床主轴箱上,通过伺服电机驱动刀杆进行回转。
刀杆上装有多个刀具,可在加工过程中根据加工要求自动更换刀具。
下面将详细介绍其工作原理。
二、刀架本体和伺服电机刀架本体是四工位自动回转刀架的核心部分,它通常由高强度铸铁材料制成,具有良好的刚性和稳定性。
伺服电机则用于驱动刀架的回转运动。
通过数控系统对伺服电机进行控制,可以实现刀架的精确定位和回转速度的调节。
三、刀杆和刀具刀杆是连接刀架本体和刀具的重要部分,通常由高强度合金钢制成。
刀杆上安装有多个刀具座,刀具座上则安装有不同类型的刀具。
刀具根据加工要求的不同,可以选择不同的刀具进行自动更换。
这样,数控车床在加工过程中可以根据需要灵活选择刀具,提高加工效率和精度。
四、工作原理详解1. 初始位置设定:在加工前,数控系统会根据加工程序设定初始位置,确定刀架的起始位置和工作方向。
2. 伺服电机驱动:根据加工要求,数控系统通过控制伺服电机的运动,使刀架进行回转。
回转的速度和方向可以通过数控系统进行调节。
3. 刀具选择:在加工过程中,数控系统会根据加工程序的要求,从刀具库中选择合适的刀具。
刀具库中存储了各种类型的刀具,根据加工要求可灵活选择。
4. 刀具更换:当需要更换刀具时,数控系统会通过控制伺服电机,使刀架停在合适的位置。
然后,利用机械装置将当前使用的刀具卸下,并安装新的刀具。
5. 加工过程:在刀具更换完成后,刀架会继续回转,数控车床进行加工作业。
在加工过程中,数控系统可以根据需要调整刀具的进给速度和切削深度,以实现不同形状和精度的加工要求。
数控车床四工位回转刀架的故障诊断与维护

换刀过程: ( 1 ) 松 开 刀 架 电 机 与刀 架 内一 蜗 杆 连 接 , 刀 架 电机转 动 时与 蜗杆 配
使接通部位接触 良好等相应措施来排除。 除此 以外, 电源不通的原因还 可考 虑 刀架至控制器断线 、 刀架内部断线、 电刷式霍尔元什位露变化 导致不 能正 常通 断等情况。 手动换刀正常、不能 白动换 刀。此时应重点检 微机 与刀架控制器 引 线、 微} I t I / o接 口及刀架到位 回答信号 如果 电器也没 f u 1 题那就检测 机械 , 用六角扳手插入蜗杆端部旋转时不易转动,而用力时 呵以转动 ,1 f _ _ { 卜次 夹紧后刀架仍不能启动 。 此种现象出现, 可确定刀架不能启动的原因是预紧 力过大, 可 通 过 调 小刀 架 电机 夹 紧 电流 排 除 之 。
I l i 平。 4 R 霍 尔 元件 开 关 输 出 的4 个 刀 位 信 号T1  ̄ 1 、 4 分 别送 到 4 只 光耦 合 进 行 处理, 经 过 光 电 隔 离 的信 号 再送 给 I / O接 口芯 片 。 架 每 个 霍 尔元 件 都 正 对 一 个刀位, 当 刀具 转 到 工作 位 置 时 , 利 用 磁 体雨 l 霍 尔元件导通, 将 川架位置发送 ̄ I P L C的数字输入。通过P L C的数字输 出, 控 制 卣流 继 电器 , 继 电器 再 驱 动 交 流 接 触 器 连 通 三 相 交 流 电 源 , 使 刀 架 电动 机 正转 或 反 转 。
例2 、故 障现 象 : 刀 架 不 能 正常 夹 紧 故 障分 析 : 出 现此 故 障时 ,首先 柃 查 夹 紧 开 关 位 置 是 否 同 定 不 当, 并 调
数控车床四工位电动刀架设计

数控车床四⼯位电动⼑架设计数控车床四⼯位电动⼑架设计摘要:数控车床今后将向中⾼当发展,中档采⽤普及型数控⼑架配套,⾼档采⽤动⼒型⼑架,兼有液压⼑架、伺服⼑架、⽴式⼑架等品种,预计近年来对数控⼑架需求量将⼤⼤增加。
数控⼑架的发展趋势是:随着数控车床的发展,数控⼑架开始向快速换⼑、电液组合驱动和伺服驱动⽅向发展。
根据加⼯对象不同,有四⽅⼑架、六⾓⼑架和⼋(或更多)⼯位的圆盘式轴向装⼑⼑架等多种形式。
回转⼑架上分别安装四把、六把或更多⼑具,并按数控装置的指令换⼑。
本部分主要对四⼯位⽴式电动⼑架的机械设计和应⽤继电-接触控制系统控制部分的设计。
并对以上部分运⽤CAD做图,对电动⼑架有更直观的了解。
最后的提出了对电动⼑架提出了意见和措施。
关键词:数控⼑架,电动⼑架,四⼯位Abstract:numerical control lathe, will in future development, the middle-grade high when to by supporting, high-grade nc cutter revised by both cutting, dynamic type hydraulic cutter, servo cutter, vertical cutter etc varieties, expected in recent years on the nc cutter demand will increase greatly. Nc cutter is the development trend of the development of numerical control lathe, along with, nc cutter began to change cutters quickly and electrohydraulic servo driver combined driving and direction. According to different targets, have four processing cutting, hexagonal cutter and eight (or more) can dise-type axial outfit knife knife, and other forms. Turn the tool carrier separately installs four, six or more tools, and press CNC equipment instructions change knife. This part of 4 Labour vertical electric mainly the mechanical design and application of cutting the relay - contact control system of control part of the design. And the above part of CAD do diagram, a more intuitive electric knife understanding. The final proposed to the electric cutter puts forward opinions and measures.Keywords: nc cutter, electric cutter, four locations引⾔数控机床是集机械、电⽓、液压、⽓动、微电⼦和信息等多项技术为⼀体的机电⼀体化产品。
四工位专用机床课程设计说明书超详细
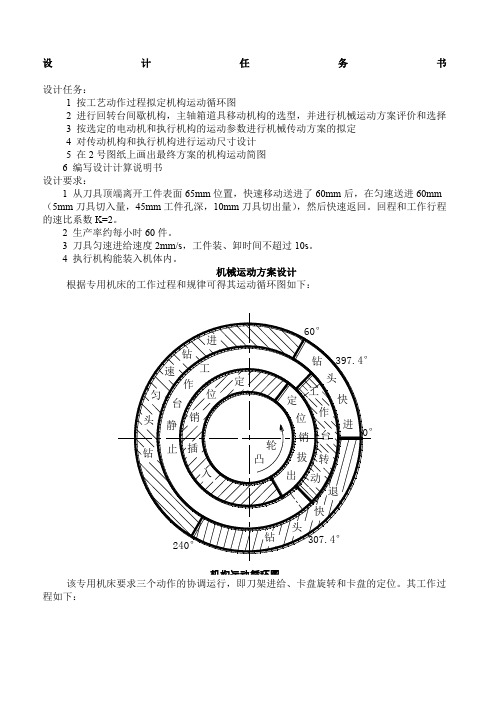
设计任务书设计任务:1 按工艺动作过程拟定机构运动循环图2 进行回转台间歇机构,主轴箱道具移动机构的选型,并进行机械运动方案评价和选择3 按选定的电动机和执行机构的运动参数进行机械传动方案的拟定4 对传动机构和执行机构进行运动尺寸设计5 在2号图纸上画出最终方案的机构运动简图6 编写设计计算说明书设计要求:1 从刀具顶端离开工件表面65mm位置,快速移动送进了60mm后,在匀速送进60mm (5mm刀具切入量,45mm工件孔深,10mm刀具切出量),然后快速返回。
回程和工作行程的速比系数K=2。
2 生产率约每小时60件。
3 刀具匀速进给速度2mm/s,工件装、卸时间不超过10s。
4 执行机构能装入机体内。
机械运动方案设计根据专用机床的工作过程和规律可得其运动循环图如下:机构运动循环图该专用机床要求三个动作的协调运行,即刀架进给、卡盘旋转和卡盘的定位。
其工作过程如下:要确保在刀具与工件接触时卡盘固定不动,刀具退出工件到下次接触工件前完成卡盘旋转动作。
几个动作必须协调一致,并按照一定规律运动。
机械总体结构设计一、原动机构:原动机选择Y132S-4异步电动机,电动机额定功率P=5.5KW,满载转速n=1440r/min 。
二、传动机构:传动系统的总传动比为i=n/n 6,其中n 6为圆柱凸轮所在轴的转速,即总传动比为1440/1。
采用涡轮蜗杆减速机构(或外啮合行星减速轮系)减速。
三、执行部分总体部局:执行机构主要有旋转工件卡盘和带钻头的移动刀架两部分,两个运动在工作过程中要保持相当精度的协调。
因此,在执行机构的设计过程中分为,进刀机构设计、卡盘旋转机构和减速机构设计。
而进刀机构设计归结到底主要是圆柱凸轮廓线的设计,卡盘的设计主要是间歇机构的选择。
在执行过程中由于要满足相应的运动速度,因此首先应该对于原动机的输出进行减速。
下面先讨论减速机构传动比的确定:由于从刀具顶端离开工件表面65mm 位置,快速移动送进了60mm 后,在匀速送进60mm (5mm 刀具切入量,45mm 工件孔深,10mm刀具切出量),然后快速返回。
FANUC系统数控车床四方刀架手动换刀PMC设计
P MC 接 收从机 床侧各 装置反馈的输 入信 号, 在 控制程序 中进行逻辑 运算 ,作 为机床动 作 的条件及对 外围设备进行诊 断的依据 。Y 是 由 P MC 输 出到机床 侧的信号 。在 P MC 控 制 程序 中,根据 自动控 制的要求 ,输 出信 号 控制机床 侧的电磁阀、接 触器 、信号灯 动作 , 满 足 机床 运 行 的需要 。I / Ol i n k 的地址 是 从 YO 开 始 的 F 是 由 控 制 伺 服 电机 与 主 轴 电机 的系统部分侧 输入到 P MC 信 号 , 系 统 部 分 就是将伺服 电机和主轴 电机 的状态 ,以及请 求相关机床 动作 的信 号 ( 如移动 中信号 、位 置检测信 号、系统准备完成信 号等) ,反馈 到 P MC 中去进行 逻辑运 输,作为机床动 作的条 件 及 进 行 自诊 断 的 依据 ,其 地 址 从 F O 开始。 G 是由 P MC 侧输 出到系统部分 的信 号,对 系统部分进 行控制和信 息反馈 ( 如轴互锁信 号、M 代码执 行完毕信号等 )其地址从 G O 开始。
用 于 数控 机 床 外 围辅助 电气 部 分 的 自动控
制 ,所 以称 为 可编 程 序 机床 控 制器 ,简称
PM C。
x 是 来 自机床侧 的输入信号 ( 如接 近开 关 、 极 限 开 关 、压 力 开 关 、操 作 按 钮 等 输 入
信 号 元件 , I / Ol i n k 的地址是从 X 0 开始 的 。
一
、
F A N U C数控系统 P MC 的介绍
数 控 系 统 分 为 控 制 伺 服 电动 机 和 主 轴 电
机 作各种进给 切削动作 的系统部分 和控制机 床外 围辅助 电气 部分的 P MC。P MC 与 P L C 所 需 实 现 的 功 能 是 基 本 一 样 的 。P L C 用 于 工 厂 一 般 通 用 设备 的 自动 控 制装 置 , 而P MC 专
自动换刀装置的形式---回转刀架换刀
8.4.1 自动换刀装置的形式自动换刀装置是加工中心的重要执行机构,它的形式多种多样,目前常见的有以下几种。
1.回转刀架换刀数控机床使用的回转刀架是最简单的自动换刀装置,有四方刀架、六角刀架,即在其上装有四把、六把或更多的刀具。
回转刀架必须具有良好的强度和刚度,以承受粗加工的切削力:同时要保证回转刀架在每次转位的重复定位精度。
图8-17为数控车床六角回转刀架,它适用于盘类零件的加工。
在加工轴类零件时,可以用四方回转刀架。
由于两者底部安装尺寸相同,更换刀架十分方便。
图8-17 数控车床六角回转刀架1-活塞2-刀架体3、7-齿轮4-齿圈5-空套齿轮6-活塞8-齿条9-固定插销10、11-推杆12-触头回转刀架的全部动作由液压系统通过电磁换向阀和顺序阀进行控制,它的动作分为4个步骤:(1)刀架抬起当数控装置发出换刀指令后,压力油由a孔进入压紧液压缸的下腔,活塞1上升,刀架体2抬起,使定位用的活动插销10与固定插销9脱开。
同时,活塞杆下端的端齿离合器与空套齿轮5结合。
(2)刀架转位当刀架抬起后,压力油从c孔进入转位液压缸左腔,活塞6向右移动,通过联接板带动齿条8移动,使空套齿轮5作逆时针方向转动。
通过端齿离合器使刀架转过60º。
活塞的行程应等于齿轮5分度圆周长的1/6,并由限位开关控制。
(3)刀架压紧刀架转位之后,压力油从b孔进入压紧液压缸上腔,活塞1带动刀架体2下降。
齿轮3的底盘上精确地安装有6个带斜楔的圆柱固定插销9,利用活动插销10消除定位销与孔之间的间隙,实现反靠定位。
刀架体2下降时,定位活动插销10与另一个固定插销9卡紧,同时齿轮3与齿圈4的锥面接触,刀架在新的位置定位并夹紧。
这时,端齿离合器与空套齿轮5脱开。
(4)转位液压缸复位刀架压紧之后,压力油从d孔进入转位液压缸的右腔,活塞6带动齿条复位,由于此时端齿离合器已脱开,齿条带动齿轮3在轴上空转。
如果定位和夹紧动作正常,推杆11与相应的触头12接触,发出信号表示换刀过程已经结束,可以继续进行切削加工。
自动回转刀架的工作原理
自动回转刀架的工作原理自动回转刀架是一种能够实现自动刀具更换和定位的设备,广泛应用于数控机床等领域。
其工作原理主要包括控制系统、传动系统和回转机构。
控制系统是自动回转刀架工作的核心。
它由计算机数控系统控制,通过发出相应的指令来控制刀架的运动和刀具的更换。
控制系统接收来自数控系统的指令,将其转化为电信号,并通过接口板送到伺服控制器。
伺服控制器根据电信号的变化来控制刀架的运动。
控制系统通过广义线轨进行位置控制,能够实现刀架在各个位置的精确定位。
传动系统是自动回转刀架的重要组成部分,其主要通过电机、减速器和传动装置实现。
电机是传动系统的驱动源,能够通过输入电信号来带动整个系统的运动。
减速器将电机的高速旋转转化为刀架的低速运动,从而提供更稳定的力矩输出。
传动装置则将减速器的输出转化为刀架的运动,使刀架能够按照指定的路径和速度进行回转。
回转机构是实现刀架自动回转的关键部件。
它由电机、轴承和转盘组成。
电机通过电信号驱动转盘的转动,从而实现刀架的回转。
轴承则在转盘和支撑座之间提供支撑和转动的功能,保证刀架的稳定运行和精确定位。
回转机构通过起到回转作用,使刀架能够实现不同刀具之间的自动更换。
同时,它还能够通过改变电机的转速和方向来实现刀架的旋转运动。
自动回转刀架的工作原理是通过控制系统驱动传动系统和回转机构,实现刀架的自动定位和刀具的自动更换。
首先,控制系统接收来自数控系统的指令,计算出刀具的更换位置。
然后,传动系统根据控制信号驱动电机和减速器,将刀架带到相应的位置。
最后,回转机构通过转盘驱动刀架实现刀具的旋转更换,完成刀具更换的动作。
除了刀具更换,自动回转刀架还能够实现刀架的自动定位。
在加工过程中,控制系统可以根据程序要求实时改变刀架的位置,使刀具能够按照顺序完成加工操作。
这种自动定位功能可以大大提高加工效率和精度。
总之,自动回转刀架通过控制系统、传动系统和回转机构的协同作用,实现刀架的自动定位和刀具的自动更换。
数控车床自动回转刀架PLC控制系统设计
1 电动回转刀架工作过程
电动刀架一般有 四工位或 六工位 , 由电动机 、 械 机 换刀 机构 、 发讯盘 等组 成 , 当系统 发 出换 刀信 号 , 刀架 电机正转 , 通过 减速 机构 和 升降机 构将 上 刀体 上升 至
发生改变 , 统选 择也 会发 生 相应 的改 变 。也 可 以采 系
用单 键换 刀 , 一个 短 促 的按 键 可 以换 下 一 个 刀位 。T 指令 换刀是 直 接 通过 编 程 刀号 作 为 目的刀 位 进行 换
刀。刀架 电机顺 时针 旋 转 时为选 刀 过程 , 逆时针 旋转
2 控 制 系统 设 计
限于篇 幅 , 只给 出 自动换 刀部分梯形 图如 图 3 。 图 3是 自动换刀 控制的 P C梯形 图 , L 在梯形 图中 ,
刀架控 制 的主 电路 , 主要 是 通过 控制 刀架 电机 的正转 和 反转来控制 刀架 的正转 和 反转 ; ( ) 刀 架 控制 图 b是
用字节传送 指令将 当前 刀 位开 关 信号 1. 0 0一1. 0 3转 换成 当前刀号 存放 到 T , T选 通信 号 的作用 下 , 中 在
输入信号 进行检测 , 把刀 具各 有一 个霍 尔位 置检 测 每
维普资讯
维普资讯
机床 电器 20 . 0 83
计 算机 ・ L P C应用— —数控车床 自动 回转刀架 P C控制系统设计 L
数 控 车床 自动 回转 刀 架 P C控 制 系统 设 计 L
陈学 军 ( 台州职 业技 术学 院 ,100 380 )
摘要 : 在分析数控车床 自动 回转刀架工作过程的基础上 , 介绍 了 自动换刀控制 的 P C程序设计 。实践证 明 , L
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录一、设计任务 (2)二、总体结构设计 (2)2.1 减速传动机构的设计 (2)2.2上刀体锁紧与精定位机构的设计 (2)2.3刀架抬起机构的设计 (3)三、自动回转刀架的工作原理 (3)四、主要传动部件的设计 (5)4.1 蜗杆副的设计计算 (5)4.1.1 蜗杆的选型 (6)4.1.2 蜗杆副的材料 (6)4.1.3 按齿面接触疲劳强度进行设计 (6)4.1.4 蜗杆和涡轮的主要参数与几何尺寸 (9)4.1.5 校核涡轮齿根弯曲疲劳强度 (9)4.1.6 验算效率η (11)4.2 螺杆的设计计算 (11)五、电器控制部分的设计 (12)5.1 硬件电路设计 (12)5.1.1 收信电路 (12)5.1.2 发信电路 (14)5.2 控制软件设计 (17)参考文献 (16)一、设计任务题目:数控车床自动回转刀架结构设计任务:设计一台四工位立式回转刀架,适用于C616或C6132经济型数空车床。
要求绘制自动回转刀架的机械结构图。
推荐刀架所用电动机的额定功率为90W,额定转速1440r/min,换刀时要求刀架转动的速度为30r/min。
二、总体结构设计2.1 减速传动机构的设计普通的三项异步电动机因转速太快,不能直接驱动刀架进行换刀,必须经过适当的减速。
根据立式转位刀架的结构特点,采用蜗杆副减速时最佳选择。
蜗杆副传动可以改变运动的方向,获得较大的传动比,保证传动精度和平稳性,并且具有自锁功能,还可以实现整个装置的小型化。
2.2上刀体锁紧与精定位机构的设计由于刀具直接安装在上刀体上,所以上刀体要承受全部的切削力,其锁紧与定位的精度将直接影响工件的加工精度。
本设计上刀体的锁进玉定位机构选用端面齿盘,将上刀体和下刀体的配合面加工成梯形端面齿。
当刀架处于锁紧状态时,上下端面齿相互啮合,这时上刀体不能绕刀架的中心轴旋转;换刀时电动机正转,抬起机构使上刀体抬起,等上下端面齿脱开后,上刀体才可以绕刀架中心轴转动,完成转位动作。
2.3刀架抬起机构的设计要想使上、下刀体的两个端面齿脱离,就必须设计适合的机构使上刀体抬起。
本设计选用螺杆-螺母副,在上刀体内部加工出内螺纹,当电动机通过蜗杆-涡轮带动蜗杆绕中心轴转动时,作为螺母的上刀体要么转动,要么上下移动。
当刀架处于锁紧状态时,上刀体与下刀体的端面齿相互啮合,因为这时上刀体不能与螺杆一起转动,所以螺杆的转动会使上刀体向上移动。
当端面齿脱离啮合时,上刀体就与螺杆一起转动。
设计螺杆时要求选择适当的螺距,以便当螺杆转动一定的角度时,使得上刀梯与下刀体的端面齿能够完全脱离啮合状态。
自动回转刀架的传动机构示意图,详细的装配图在图纸上。
三、自动回转刀架的工作原理自动回转刀架的换刀流程如下图。
图上表示自动回转刀架在换刀过程中有关销的位置。
其中上部的圆柱销2和下部的反靠销6起着重要作用。
当刀架处于锁紧状态时,两销的情况如图A所示,此时反靠销6落在圆盘7的十字槽内,上刀体4的端面齿和下刀体的端面齿处于啮合状态(上下端面齿在图中未画出)。
需要换刀时,控制系统发出刀架转位信号,三项异步电动机正向旋转,通过蜗杆副带动蜗杆正向转动,与螺杆配合的上刀体4逐渐抬起,上刀体4与下刀体之间的端面齿慢慢脱开;与此同时,上盖圆盘1也随着螺杆正向转动(上盖圆盘1通过圆柱销与螺杆联接),当转过约错误!未找到引用源。
时,上盖圆盘1直槽的另一端转到圆柱销2的正上方,由于弹簧3的作用,圆柱销2落入直槽内,于是上盖圆盘1就通过圆柱销2使得上刀体4转动起来(此时端面齿已完全脱开)。
上盖圆盘1、圆柱销2以及上刀体4在正转的过程中,反靠销6能够从反靠圆盘7中十字槽的左侧斜坡滑出,而不影响上刀体4寻找刀位时的正向转动。
上刀体4带动磁铁转到需要的刀位时,发信盘上对应的霍尔元件输出低电平信号,控制系统收到后,立即控制刀架电动机反转,上盖圆盘1通过圆柱销2带动上刀体4开始反转,反靠销6马上就会落入反靠圆盘7的十字槽内,至此,完成粗定位。
此时,反靠销6从反靠圆盘7的十字槽内爬不上来,于是上刀体4停止转动,开始下降,而上盖圆盘1继续反转,其直槽的左侧斜坡将圆柱销2的头部压入上刀体4的销空内,之后,上盖圆盘1是下表面开始与圆柱销2的头部滑动。
再次期间,上、下刀体的端面齿逐渐啮合,实现精定位,经过设定的延时时间后,刀架电动机停转,整个换刀过程结束。
由于蜗杆副具有自锁功能,所以刀架可以稳定地工作。
四、主要传动部件的设计4.1 蜗杆副的设计计算自动回转刀架的动力源是三相异步电动机。
其中蜗杆与电动机直联,刀架转位时蜗轮与上刀体直联。
已知电动机额定功率错误!未找到引用源。
=90W 。
,额定转速1n =1440r/min ,上刀体设计转速错误!未找到引用源。
=30r/min ,则蜗杆销连接 蜗杆-涡轮减速刀架电动机正转 螺杆正转 上盖圆盘旋转霍尔元件触发蜗杆-涡轮减速上刀体抬起端面齿错开圆柱销落入上盖圆上刀体旋转 到位回答 刀架电动机反转 螺杆反转 反靠销反靠端面齿啮合刀架电动机正转刀架电动机正转延时锁紧 电动机停转 自动回转刀架的换刀流副的传动比i=1n 错误!未找到引用源。
/2n 错误!未找到引用源。
=1440/30=48。
刀架从转位到锁紧时,需要蜗杆反向,工作载荷不均匀,启动时冲击较大,今要求蜗杆副的使用寿命错误!未找到引用源。
=10000h 。
4.1.1 蜗杆的选型GB/T10085-1988推荐采用渐开线蜗杆和锥面包络蜗杆。
本设计采用结构简单,制造方便的渐开线型圆柱蜗杆。
4.1.2 蜗杆副的材料刀架中的蜗杆副传动的功率不大,但蜗杆转速干,一次,蜗杆的材料选用45钢,其螺旋齿面要淬火,硬度为45~55HRC,以提高其表面耐磨行;蜗轮的转速较低,其材料主要考虑耐磨性,选用铸锡磷青铜ZCuSn10P1,采用金属模制造。
4.1.3 按齿面接触疲劳强度进行设计刀架中的蜗杆副采用闭式传动,多因齿面胶合或点蚀而失效。
因此,进行载荷计算时,先按齿面接触疲劳强度进行设计,再按齿根弯曲疲劳强度进行校核。
按蜗轮接触疲劳强度条件设计计算的公式a ≥ 232)][(H P E Z Z KT σ错误!未找到引用源。
(4-1)式中 a--蜗杆副的传动中心距,单位mm ;K--载荷系数;T 2错误!未找到引用源。
--作用在涡轮上的转矩错误!未找到引用源。
,单位N.mm ;Z E --弹性影响系数,单位 MPZ P --接触应力,[H σ错误!未找到引用源。
]--许用接触应力,单位为MPa 。
从式中算出蜗杆副的中心距a 之后,根据已知的传动比i=48,查表选择一个合适的中心距a 值,以及相应的蜗杆,蜗轮参数。
1)确定作用在蜗轮上的转矩错误!未找到引用源。
蜗杆头数错误!未找到引用源。
=1,蜗杆副的传动效率η=0.65,由电动机的额定功率P 1=90W ,可以算出蜗轮传动的功率P 2错误!未找到引用源。
=P 1错误!未找到引用源。
η,再由蜗轮的转速n 2=30r/min 求得作用在蜗轮上的转矩T 2错误!未找到引用源。
=9.5522n p 错误!未找到引用源。
=9.5521n p η错误!未找到引用源。
=18.623N ·m=18623N ·mm2)确定载荷系数K载荷系数K= K A K β K V 其中KA 为使用系数,查表得, 由于工作载荷不均匀,启动时冲击较大,因此取K A =1.15; K β为齿向分布系数,因工作载荷在启动和停止时有变化,故取K β=1.15;K V 为动载系数,由于转数不高。
冲击不大,可取K V =1.05。
则载荷系数K= K A K β K V 错误!未找到引用源。
≈1.39使用系数K A 工作类型I II III 载荷性质 均匀,无冲击 不均匀,小冲击 不均匀,大冲击每小时起动次数 <2525-50 >50 起动载荷 小较大 大 KA1 1.15 1.23)确定弹性影响系数Z E铸锡磷青铜蜗轮与钢蜗杆相配时,从有关手册查的弹性影响系Z E =160Mpa 1/24)确定接触系数Z P先假设蜗杆分度圆直径d1 和传动中心距a 的比值d1错误!未找到引用源。
/a=0.35。
查表的Z P =2.9铸锡青铜蜗轮的基本许用接触应力[σH ]`(MPa) 蜗轮材料铸造方法 蜗杆螺旋面的硬度 ≤45HRC >45HRC 铸锡磷青铜ZCuSn10P1 砂模铸造 150180 金属模铸造 220268 铸锡锌铅青铜ZCuSn5Pb5Zn5 砂模铸造 113135 金属模铸造128 1405)确定许用接触应力[H σ]根据蜗轮材料为铸锡磷青铜ZCuSn10P1金属模制造蜗杆螺旋齿面硬度大于45HRC 可查表的蜗轮的基本许用应力][H σ`错误!未找到引用源。
=268MPa 已知蜗杆为单头,蜗轮每转一转时每个轮齿啮合的次数j=1;蜗轮转数错误!未找到引用源。
=30r/min ;蜗杆副的使用寿命错误!未找到引用源。
=10000h 。
则应力循环次数:N=60j n2 错误!未找到引用源。
错误!未找到引用源。
=60×1×30×10000=1.8×107错误!未找到引用源。
寿命系数:K HN=87787108.11010⨯=N =错误!未找到引用源。
0.929许用接触应力:[H σ]=KHN ×[H σ]`=0.929⨯268=MPa6)计算中心距 将以上各参数带入4-1,求得中心距:a ≥232)][(H P E Z Z KT σ=)2499.2160(1862339.13⨯⨯⨯=44.8mm 错误!未找到引用源。
查表取a=50,已知蜗杆头数Z 1错误!未找到引用源。
=1,设模数m=1.6mm ,得蜗杆分度圆直径d 128mm 。
这时错误!未找到引用源。
d 1/a=0.4,查表得接触系数Z P `=2.75。
因为Z P `< Z P 错误!未找到引用源。
所以上述计算结果可用。
4.1.4 蜗杆和涡轮的主要参数与几何尺寸1)由蜗杆和涡轮的基本尺寸和主要参数蜗杆的参数与尺寸 头数Z 1错误!未找到引用源。
=1,模数m=1.6mm ,轴向齿距P a 错误!未找到引用源。
=π错误!未找到引用源。
m=5.027mm轴向齿厚S a 错误!未找到引用源。
=21错误!未找到引用源。
m=2.514mm ,分度圆直径错误!未找到引用源。
=20mm直径系数q=错误!未找到引用源。
=6.120=12.5分度圆导程角错误!未找到引用源。
=11arctand mz 错误!未找到引用源。
=q z 1arctan=`574 取齿顶高系数错误!未找到引用源。
=1,径向间隙系数c=0.2,则齿顶圆直径d 1a 错误!未找到引用源。
=d 1错误!未找到引用源。