结构力学第8章
清华大学结构力学第8章渐进法分析

A
i
B
A
M AB iA
M BA iA
A
i
B
A
CAB
M BA M AB
1 2
CAB
M BA M AB
0
CAB
M BA M AB
1
在上面的讨论中可知,远端弯矩等于近端弯
矩乘传递系数,即 MBA CAB M。AB 清华大学结构力学第8章渐进法分 析
四、单结点力矩分配
MB=60kN.m
200kN
A
EI
3m
B
3m
20kN/m
EI C
6m
a)
200kN MB 60kN.m 20kN/m
B
A
B
150kN.m -90kN.m 150kN.m 150kN.m 90kN.m C
b)
用位移法解图a)所示结构时,首先在结点B加上 附加转动约束,锁住B使之不能转动。其产生的 反力矩MB等于各杆端固端力矩的代数和,见图 b)。
0.571
BC
3 7
0.429
M
F AB
1 8
2006Biblioteka 150kN.mMF BC
1 20 62 8
90kN.m
结点B约束力矩为:
M
F BA
1 8
200
6
150kN.m
结点B分配力矩为:
MB (150 90)清华6大0学k结N构.m力学第8章渐进M法分B 60kN.m
析
3)运算格式
分配系数 固端弯矩 分配传递
A
-150
-17.13
杆端弯矩 -167.13
BA BC
0.571 0.429
150 -90 -34.26 -25.74
结构力学第八章 影 响 线
与其他截面上的弯矩无关。
(4) 绘制规定不同 MC的影响线中的正弯矩画在基线的上方, 负弯矩画在基线的下方,标明正负号。
★第三节
结点荷载作用下梁的影响线
(1)支座反力FRA和FRB的影响线
(2)MC的影响线 C点正好是结点。
(3) MD的影响线 (4) FQCE的影响线 力,以FQCE表示。 MD的影响线如图8-5c所示。 在结点荷载作用下,主梁在C、E两点之间
3.弯矩影响线作法 由此得简支梁作弯矩影响线简易作法:先作一基线,在基线对
应所作弯矩影响线截面处作一竖线,其值为ab/l,连接A、B两
端,即为此截面弯矩的影响线,如图8-2e所示。 弯矩影响系数其量纲为L,单位为m
3.弯矩影响线作法 【例8-1】试用静力法绘制图8-3所示外伸梁的FAy、FBy、FQC、 MC 、FQD、MD的影响线。 【解】(1)绘制反力FAy、FBy的影响线。取A点为坐标原点,横 坐标x向右为正。当荷载F=1作用于梁上任一点x时,分别求得 反力FAy、FBy的影响线方程为
这就是FRB的影响线方程。由此方程知,FRB的影响线是一条
直线。在A点,x=0,FRA=0。在B点,x=1,FRB=1。利用这 两个竖距便可以画出FRB的影响线,如图8-2b所示。
(2) 支座反力FRA影响线作法 将FP=1放在任意位置,距A点为x。由平衡条件 解得 这就是FRA的影响线方程。由此方程知,FRA的影响线也是一
1.支座反力的影响线 (1) 支座反力FRB影响线作法 如图8-2a所示简支梁,将FP=1放 将FP=1放在任意位置,距A点为x。
在任意位置,距A点为x。
(2) 支座反力FRA影响线作法
(1) 支座反力FRB影响线作法 如图8-2a所示简支梁,将FP=1放在任意位置,距A点为x。 由平
结构力学教程——第8章 影响线
P1 P2 Pk
PN
C
a
b
dx dy1
y1 y2 yk h
yN
MC影响线
dyk+1 dx
MC (x) =P1y1 + P2y2 + Pkyk +…+ PNyN
dMC (x) =P1dy1 + P2dy2 + Pkdyk +…+ PNdyN
dMC (x) =dy1 (P1+ P2 +…+ Pk)+dyk+1 (Pk+1+ Pk+2 +…+ PN)
横坐标以 下的图形,影响线系数取负号。
例:机动法作简支梁C点弯矩和剪力的影响线。 x P=1
A
C
B
a
b
l
解:弯矩的影响线
ab/l
1
b
A
C
B
MC
x P=1
A
C
B
a
b
l
解:剪力的影响线
b/l
1
A
C
B
QC
a/l
小结
机动法作影响线的步骤
撤去与Z相应的约束,代以未知力Z。 使体系沿Z的正方向发生位移,作出δP图, 既为Z的影响线的轮廓。 令δz=1,可定出影响线的竖距。 横坐标以上的图形,影响线系数取正号;
P1
RL Pk RR
a
b
RL Pk RR
a
b
R L Pk 7 2 > R R 4.5
求QC
q
A
C
B
dx
b
l
QC
a
y
l
QC
结构力学第8章

退 出 最大差; c为结构中一个结点的位移分量数,显然,最大半
带宽与结构的结点编码的顺序有关。通常应使相邻结点编
上一页 码的最大差值为最小,即d 值为最小。
下一页
烟台大学
返回 自测 帮助 开篇 退出
上一页 下一页
第四章第8章 静矩定阵结位构移的法位移计算
例如图示刚架,按图a 编码,d=3×(9+1)=30 ,而按 b 图编码,d=3×(3+1)=12 。
位移法的基本未知量也是结点位移——独立的线位移和转
退出
角。但由于有时考虑杆件的轴向变形,且把杆件铰结端的
转角也作为基本未知量,因此,基本未知量数目比传统位
上一页
移法的基本未知量多一些。
下一页
烟台大学
返回 自测 帮助 开篇 退出
上一页 下一页
第四章第8章 静矩定阵结位构移的法位移计算
烟台大学
返回 自测 帮助 开篇 退出
4. 总刚度方程和总刚度矩阵的性质与特点
返回
总刚度方程为整体结构的结点荷载与结点位移之间的 自 测 关系式,是结构应满足的平衡条件。无论何种结构,其总
刚度方程都具有统一的形式:
帮助
K=P
开篇
式中K为总刚度矩阵,为结构的结点位移列向量,P
退出
为结点力列向量。
上一页
总刚度矩阵K反应了整个结构的刚度,是描述结点
(3) 连续梁的等效体刚度矩阵K和等效结点荷载P代入基本方程得
(5) 解方程得
8i 2i
2i1 8i2
ql2 102
1
ql2 90i
,
2
ql2 36i0
(6) 求杆端力并绘制弯矩图如图所示c。
(c ) 4 5 .6
结构力学第8章位移法

结构力学第8章位移法位移法是结构力学中一种常用的分析方法。
它基于结构物由刚性构件组成的假设,通过计算结构在外力作用下产生的位移和变形,进而推导出结构的反力和应力分布。
位移法的基本思想是将结构的局部位移组合成整体位移,通过建立位移和反力之间的关系,解决结构的力学问题。
位移法的分析步骤通常包括以下几个方面:1.建立结构的整体位移函数。
位移函数是位移法分析的基础,通过解结构的运动方程建立结构的位移与自由度之间的关系。
2.应用边界条件。
根据边界条件,确定结构的支座的位移和转角值。
支座的位移和转角值可以由结构的约束条件和外力产生的位移计算得出。
3.构建位移方程组。
将结构的整体位移函数带入到结构的平衡方程中,得到位移方程组。
位移方程组是未知反力系数的线性方程组。
4.解位移方程组。
通过解位移方程组,求解未知反力系数。
可以使用高斯消元法、克拉默法则或矩阵方法等解方程的方法求解。
5.求解反力和应力分布。
通过已知的位移和未知的反力系数,可以计算出结构的反力和应力分布。
这些反力和应力分布可以进一步用于结构的设计和评估。
位移法的优点是适用范围广泛,适合复杂结构的分析。
它可以处理线性和非线性的结构,包括静力学和动力学的分析。
同时,位移法具有较高的精度和准确度,在结构的分析和设计中得到广泛应用。
然而,位移法也存在一些限制。
首先,位移法假设结构是刚性的,忽略了结构的变形和位移过程中的非线性效应。
其次,位移法需要建立适当的位移函数,对于复杂结构来说,这是一个复杂和困难的任务。
此外,位移法在处理大变形和非线性结构时可能会遭遇困难。
综上所述,位移法是结构力学中一种重要的分析方法。
它通过计算结构的位移和变形,推导出结构的反力和应力分布,为结构的设计和评估提供基础。
然而,位移法也存在一些限制,需要在具体的分析问题中谨慎应用。
东南大学 结构力学第八章 影响线

1. FRA的影响线
B
A
l
MB 0
lx FR A l
(0 x l)
FP=1 x
FR A
FR B
2. FRB的影响线
1
MA 0
FRA的影响线
FR B
x l
(0 x l)
1
FRB的影响线
简支梁的弯矩影响线(下侧受拉为正)
MC的影响线
FP=1
B
当FP=1在C截面以左时, 取C截面以右CB段研究
3. 在Z的影响线中,横坐标表示的是FP=1的作用位置; 纵坐标表示
的是影响系数 Z 的大小。 (比较:弯矩图、弯矩影响线)
• 计算方法:1.静力法
2.机动法(虚功原理)
弯矩图与弯矩影响线的比较
FP
A
a
C
D b
ab l F
FP=1
B
AB梁的弯矩图
A
a
C
D b
ab
l
总结:
B
MC的影响线
1.由于荷载的位置由不变到可变,从而使得Z由不变到可变。
3) 荷载位置:
•求影响线时,FP=1是移动荷载; •内力图中,荷载位置固定。
4) FQC左的值与FQC右的值.
b
1
l
FQC影响线
a
l
1
在FQC影响线图中,当FP=1作用于C截面时,竖标
竖标
a l
=FQC右,如下图所示。
b l
=FQC左;
FP=1
FP=1
A
B
A
B
C
C
FQC左
FQC右
习题 (1) 用静力法作图示结构A,B,D支座反力影响线
结构力学8章力矩分配

作业:
8-1(a) 8-4
§8-2 多结点的力矩分配
取EI=8 μBA=0.6 μBC=0.4 μCB=0.4 μCD=0.6
A
i=2 B↓↓↓↓↓↓↓↓↓↓↓ 2EI EI 8m i=1 8m MB=-128
24kN/m
↓↓↓↓↓↓↓↓↓↓↓
24kN/m
C
i=2 4m 2EI 4m MC=53 50kN
128 -75 0.4 M 0.6 C=78.6 128 -75 25.6 25.6 -MC=-78.6 -31.4 -47.2 3.2 -31.4 -47.2 -1.3 -1.9 0.2 -0.1 -0.1 25.6 124.2 -124.2
86.6
24kN/m A B↓↓↓↓↓↓↓↓↓↓↓
124.2
2)求m 大家算mAB= 50 mBA= - 50 mAD= - 80
M+MA=mAB+mAD+mAC - M
4m
用力矩分配法计算,画M图。 解:1)求μ 大家算μAB= 4/9 μAC= 2/9 μAD= 3/9
70 40
B 100kN 100
15kN· m 40kN/m
↓↓↓↓↓↓↓↓↓
mAB
1
SAB与杆的i(材料的性质、横截面 的形状和尺寸、杆长)及远端支承 有关,而与近端支承无关。
因此,在确定杆端转动刚度时:近端看位移(是否为单位位移)
远端看支承(远端支承不同,转动刚度不同)。
下列哪种情况的杆端弯矩MAB=SAB MAB MAB ① ② θ
MAB 1
√
1
MAB
1
1
③ )
④
转动刚度SAB=4i是(
结构力学(龙驭球)第八章
r
1 4i
11
3i
3
M 1图
2i
4
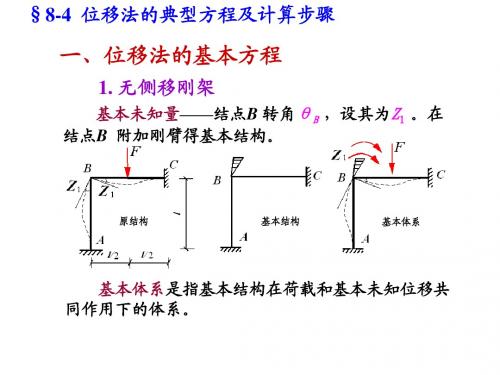
§8-4 位移法的典型方程及计算步骤
截取横梁12为隔离体, 由平衡条件得 r21 注意:杆端剪力FS13可 根据杆端弯矩求出。 取13杆为隔离体, 由∑M3=0, 有
FS13 l M 13 M 31 0
1 2
6
r2 1
6i l
M
1
13
i
l
0
R1
1
M 12 M
13
R1 R11 R12 R1P 0 R2 R21 R22 R2 P 0
(8-5)
M 13 0
第一式: R1 M 12
2
R2
反应了原结构横梁12上柱的 FS 2 4 FS13 剪力平衡条件。 设Z1=1时附加刚臂的约束反力矩r11,附加链杆的 约束力r21;Z2=1时附加刚臂的约束反力矩r12 ,附加 链杆的约束力r22,则 R11 r11 Z 1 R12 r12 Z 2
解:(1) 确定基本未知量,结点C的角位移Z1。 (2) 建立基本结构,得到基本体系。
§8-4 位移法的典型方程及计算步骤
(3) 建立位移法典型方程。
r11Z1 R1 0
(4)计算系数和自由项。 令
i EI l
,做出 M 1 图
r 8i 3i 11i 11
基本结构由于支座A产生位移时,各杆端的弯矩:
E I= 常 数 8
Fl
F
3
l
4
Fl
8
3
4
3
27
M
P
图
2i
M 1图
4
r 21
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第8章 静定结构的位移计算 矩阵位移法 第四章
返回
自测
对于每个结点位移分量数相同的结构,原始刚度矩 阵的阶数为结构的总结点数乘以结点位移分量的数目, 例如,每个结点位移分量数为3的平面刚架,结构原始 刚度矩阵的阶数为3n×3n 。
帮助 开篇
退出
上一页
下一页
烟台大学
第8章 静定结构的位移计算 矩阵位移法 第四章
烟台大学
第8章 静定结构的位移计算 矩阵位移法 第四章
返回
自测
对于支座位移等于给定值时,采用“乘大数法”。 设结点位移向量中第 r个位移等于d0,在矩阵K与向量P中, , 主对角元素krr 改为Gkrr,将Pr改为d0Gkrr,其中G为一 大数通常取108~1010 。
帮助 开篇
退出
上一页
下一页
烟台大学
第8章 静定结构的位移计算 矩阵位移法 第四章
2. 先处理法
返回
自测
帮助 开篇
退出
上一页
下一页
(1) 集成。将单元刚度矩阵先按边界条件进行处理 , 然后按照单元连接结点的总位移编号将单元刚度矩阵的 元素在结构的刚度矩阵中对号入座,形成总刚后即可进 行求解。上述过程可通过引入定位向量来实现。在单元 定位向量中考虑边界条件,凡给定的结点位移分量,其 位移总码均编为零,与总码编为零相应的行、列元素在 集成总刚时被屏弃在外。 单元定位向量:按单元连接结点编号顺序由结点未 知位移编号组成的向量。
(2)边界条件处理
返回
自测
帮助 开篇
退出
上一页
下一页
对于刚性支座,用划行划列法处理刚性支座,即直 接划去原始刚度方程中与零位移对应的行和列。这样做 有时要改变原方程的排列顺序,会给编程带来麻烦。为了 不改变原方程的排列顺序,同时又要引入边界条件 ,采用 “主一副零”法。
设结点位移向量中第r个位移等于零, 即r=0 ,则在 结构的原始刚度矩阵k中的第r行第r列中主对角元素krr改 为1其余元素改为零。同时将结点结点荷载列向量 P中的 第r个分量也改为零。 即 k rr 1 k rs k sr 0 ( s r ) Pr 0
第8章 静定结构的位移计算 矩阵位移法 第四章 矩阵位移法的基本思路是:
返回
自测
(1) 先把结构离散成单元,进行单元分析,建立单元杆 端力与杆端位移之间的关系; (2)在单元分析的基础上,考虑结构的几何条件和平衡 条件,将这些离散单元组合成原来的结构,进行整体分析, 建立结构的结点力与结点位移之间的关系,即结构的总刚 度方程,进而求解结构的结点位移和单元杆端力。 在从单元分析到整体分析的计算过程中,全部采用矩 阵运算。
烟台大学
第8章 静定结构的位移计算 矩阵位移法 第四章
4. 总刚度方程和总刚度矩阵的性质与特点
返回
自测
总刚度方程为整体结构的结点荷载与结点位移之间 的关系式,是结构应满足的平衡条件。无论何种结构, 其总刚度方程都具有统一的形式:
K=P 式中K为总刚度矩阵,为结构的结点位移列向量,P 为结点力列向量。 总刚度矩阵K反应了整个结构的刚度,是描述结点 力与结点位移之间关系的系数矩阵。其矩阵的性质与 特点:
烟台大学
第8章 静定结构的位移计算 矩阵位移法 第四章
返回
自测
帮助 开篇
退出
上一页
下一页
(2)边界条件处理。对于刚性支座,其位移总码均 编为零。对于支座位移等于给定值时,通常也将其位移 总码均编为零,将支座结点位移的影响转换成单元非结 点荷载,即,将支座结点位移转换成与该支座结点位移连 接的各单元在单元坐标系中的杆端位移,求出由此给定 的杆端位移产生的单元固端力,然后转换成等效结点荷 载。 3. 弹性支座的处理 通常用主对角元素叠加法处理弹性支座。如果结构 的第j个自由度是弹性约束,那么,把弹性支座的刚度系 数叠加到原始刚度矩阵主对角线的第j个元素上即可得到 经约束处理后的总刚度方程。
帮助 开篇
退出
上一页
下一页
烟台大学
第8章 静定结构的位移计算 矩阵位移法 第四章
返回
自测
( 1 )元素kij的物理意义为:当△j=1而其他位移分量为 零时产生在△i方向的杆端力。 (2)主子块Kii是由结点i的相关单元中与结点i相应的 主子块叠加而得。 (3)当i、j为相关结点时,副子块Kij就等于连接ij的杆 单元中相应的子块;若i、j不相关,则Kij为零子块。 (4)总刚度矩阵为对称矩阵。 (5)总刚度矩阵为稀疏带状矩阵。愈是大型结构, 带状分布规律就愈明显。 (6)总刚度矩阵主对角元素都大于零。通常是主对 角元素占优势的矩阵,因此,线形方程组的解有较好的稳 定性。
帮助 开篇
退出
上一页
下一页
烟台大学
第8章 静定结构的位移计算 矩阵位移法 第四章
二、总刚度矩阵的集成及约束处理
返回
自测
帮助 开篇
退出
上一页
下一页
集成总刚度矩阵最常用的方法是直接刚度法,即由单 元刚度矩阵直接集成结构刚度矩阵,又可分为后处理法和 先处理法。 1. 后处理法 (1) 集成。对所有单元不做边界条件处理,均采用自 由式的单元刚度矩阵,按单元的结点编号将单元刚度矩 阵分为四个子块(阶数相同),逐块地将结点所对应的 子块在结构的原始刚度矩阵中对号入座,形成结构的原 始刚度矩阵。由于结点位移分量中包括了非自由结点的 已知位移,原始刚度矩阵为奇异的,需进行边界条件处 理,才能求解自由结点位移。由于原始刚度矩阵的阶数 较高,所以后处理法的主要缺点是占用较多的计算机内 存。
烟台大学
帮助 开篇
退出
上一页
下一页
第8章 静定结构的位移计算 矩阵位移法 第四章
5. 总刚度矩阵的最大半带宽
返回
自测
帮助 开篇
退出
上一页
下一页
总刚度矩阵的上三角部分,从某行的主对角元素到该 行最末一个非零元素所具有的元素的个数称为该行的半带 宽。各行半带宽的最大值称为总刚度矩阵的最大半带宽。 对应于后处理法,结构内部不存在组合结点时最大半 带宽的计算公式为:d=(b+1)c ,其中b为单元两端结点编码 的最大差; c为结构中一个结点的位移分量数,显然,最 大半带宽与结构的结点编码的顺序有关。通常应使相邻结 点编码的最大差值为最小,即d 值为最小。
烟台大学
第8章 静定结构的位移计算 矩阵位移法 第四章
返回
自测
(a) 1 10 19 (b) 1 2 5 6 11 20 4 8 9 2 3 12 21 7 4 13 22 10 11 12 5 14 23 13 14 15 6 15 24 16 17 18 7 16 25 19 20 21 8 17 26 22 23 24 9 18 27 25 26 27