祁皑结构力学 第8章 位移法
福大结构力学课后习题详细答案(祁皑).. - 副本
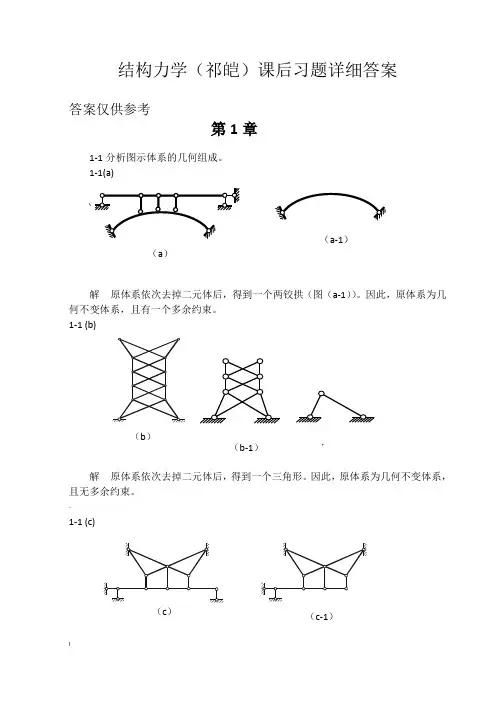
结构力学(祁皑)课后习题详细答案答案仅供参考第1章1-1分析图示体系的几何组成。
1-1(a)(解原体系依次去掉二元体后,得到一个两铰拱(图(a-1))。
因此,原体系为几何不变体系,且有一个多余约束。
1-1 (b)解原体系依次去掉二元体后,得到一个三角形。
因此,原体系为几何不变体系,且无多余约束。
1-1 (c)[(c-1)(a)(a-1)(b)(b-1)*(c-2) (c-3)解 原体系依次去掉二元体后,得到一个三角形。
因此,原体系为几何不变体系,且无多余约束。
1-1 (d)!(d-1) (d-2) (d-3)解 原体系依次去掉二元体后,得到一个悬臂杆,如图(d-1)-(d-3)所示。
因此,原体系为几何不变体系,且无多余约束。
注意:这个题的二元体中有的是变了形的,分析要注意确认。
1-1 (e)~解 原体系去掉最右边一个二元体后,得到(e-1)所示体系。
在该体系中,阴影所示的刚片与支链杆C 组成了一个以C 为顶点的二元体,也可以去掉,得到(e-2)所示体系。
在图(e-2)中阴影所示的刚片与基础只用两个链杆连接,很明显,这是一个几何可变体系,缺少一个必要约束。
因此,原体系为几何可变体系,缺少一个必要约束。
1-1 (f)[解 原体系中阴影所示的刚片与体系的其它部分用一个链杆和一个定向支座相(d )(e )(e-1)AB}AB (e-2)(f )(f-1)连,符合几何不变体系的组成规律。
因此,可以将该刚片和相应的约束去掉只分析其余部分。
很明显,余下的部分(图(f-1))是一个几何不变体系,且无多余约束。
因此,原体系为几何不变体系,且无多余约束。
1-1 (g)解 原体系中阴影所示的刚片与体系的其它部分用三个链杆相连,符合几何不变体系的组成规律。
因此,可以将该刚片和相应的约束去掉,只分析其余部分。
余下的部分(图(g-1))在去掉一个二元体后,只剩下一个悬臂杆(图(g-2))。
因此,原体系为几何不变体系,且无多余约束。
福大结构力学课后习题详细问题详解(祁皑).. - 副本
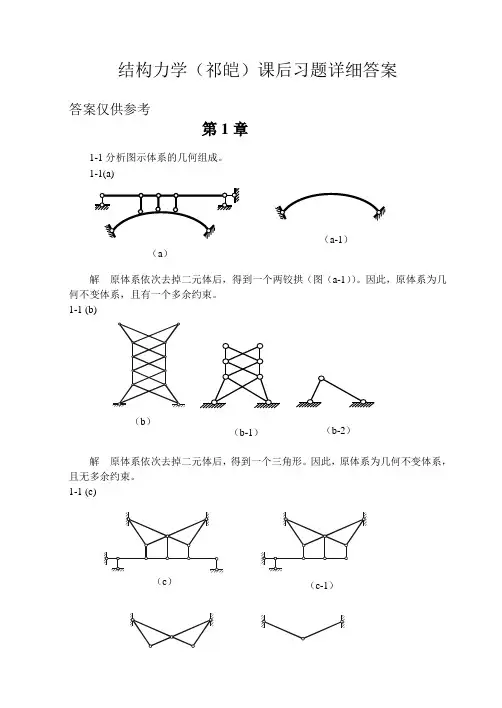
结构力学(祁皑)课后习题详细答案答案仅供参考第1章1-1分析图示体系的几何组成。
1-1(a)解 原体系依次去掉二元体后,得到一个两铰拱(图(a-1))。
因此,原体系为几何不变体系,且有一个多余约束。
1-1 (b)解 原体系依次去掉二元体后,得到一个三角形。
因此,原体系为几何不变体系,且无多余约束。
1-1 (c)(c-1)(a )(a-1)(b )(b-1)(b-2)(c-2) (c-3)解 原体系依次去掉二元体后,得到一个三角形。
因此,原体系为几何不变体系,且无多余约束。
1-1 (d)(d-1) (d-2) (d-3)解 原体系依次去掉二元体后,得到一个悬臂杆,如图(d-1)-(d-3)所示。
因此,原体系为几何不变体系,且无多余约束。
注意:这个题的二元体中有的是变了形的,分析要注意确认。
1-1 (e)解 原体系去掉最右边一个二元体后,得到(e-1)所示体系。
在该体系中,阴影所示的刚片与支链杆C 组成了一个以C 为顶点的二元体,也可以去掉,得到(e-2)所示体系。
在图(e-2)中阴影所示的刚片与基础只用两个链杆连接,很明显,这是一个几何可变体系,缺少一个必要约束。
因此,原体系为几何可变体系,缺少一个必要约束。
1-1 (f)解原体系中阴影所示的刚片与体系的其它部分用一个链杆和一个定向支座相连,符合几何不变体系的组成规律。
因此,可以将该刚片和相应的约束去掉只分析其余部分。
很明显,余下的部分(图(f-1))是一个几何不变体系,且无多余约束。
因此,原体系为几何不变体系,且无多余约束。
1-1 (g)(d ) (e )(e-1)A(e-2)(f )(f-1) (g ) (g-1) (g-2)解 原体系中阴影所示的刚片与体系的其它部分用三个链杆相连,符合几何不变体系的组成规律。
因此,可以将该刚片和相应的约束去掉,只分析其余部分。
余下的部分(图(g-1))在去掉一个二元体后,只剩下一个悬臂杆(图(g-2))。
结构力学-位移法PPT学习教案
F
有两个刚结点E、F、D、C,由于忽
略轴向变形, 点的竖向 E、F、D、C
C
位移为零, 点及 的水平
E、F
D、C 点
位移相等,因此该结构的未知量为:
E F C D EF CD
B
第10页/共96页
§8-2 位移法未知量的确定
结论: 刚架(不带斜杆的)一个结点一个转角,一层一个侧移。
例5:
A B
例6: A
荷载作用下,杆端弯矩表达式:
3
EI L
B
qL2 8
M AB 0
第27页/共96页
§8-3 杆端力与杆端位移的关系
FP
例:
BA杆:
B 2EI
q EI
可看作两端固定的梁,在B端支座发
C
生了转角B水平位移 ,BC还有均 L 布荷载作用下,杆端弯矩表达式
:
A
L/2
L/2
M BA
4
EI L
B
6EI L2
BC
B 排架结构,有两个铰结点A、B, 由于忽略轴向变形,A、B两点的竖 向位移为零,A、B两点的水平位移
D
相等,因此该结构的未知量为: AB
例8:
A
B
EA=∞
C
E
F
两跨排架结构,有四个结点 A、B、C、D,同理A与B点、D与 D C点的水平位移相同,各结点的 竖向位移为零,但D结点有一转 角,因此该结构的未知量为:
下面开始对单跨超静定梁在支座位移及荷载作用 下的杆端弯矩用力法进行逐个求解。
第16页/共96页
§8-3 杆端力与杆端位移的关系
第17页/共96页
§8-3 杆端力与杆端位移的关系
第18页/共96页
结构力学第八章位移法
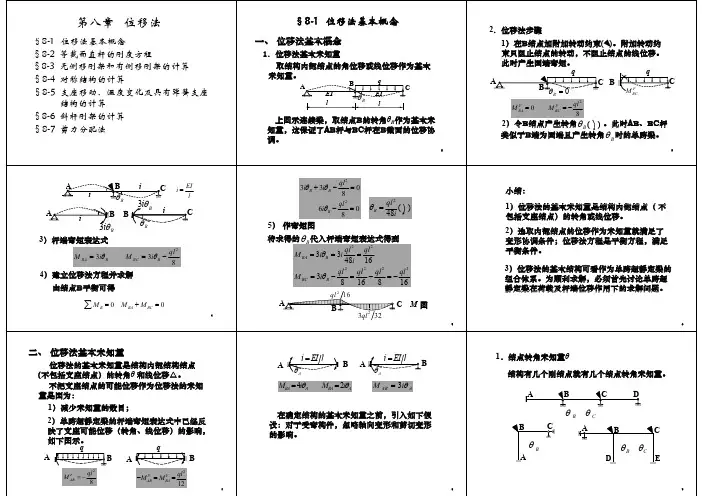
二、等截面直杆的刚度方程
D
EI 1. 两端固定梁 i l
MAB 4iA M BA 2i A
由上图可得: i
A
M AB 4i A 2i B
M BA
B( ) 3.杆件两端相对侧移 杆件两端相对侧移
C ( )
A A
EI
B
A
B 可写成:
6i l 6i 2i A 4i B l
F M BA 0 F M BC
B
EI
C
上图示连续梁,取结点B的转角θB作为基本未 知量,这保证了AB杆与BC杆在B截面的位移协 这保 与 在 截 位移协 调。
2
2)令 )令B结点产生转角 结点产生转角 B ( ) 。此时 。此时AB、BC杆 杆 类似于B端为固端且产生转角 B 时的单跨梁。
l
MAB
B
MBA
MAB 2iB M BA 4i B
杆件两端相对侧移△,其与弦转角β 的正负 号一致。而β以顺时针方向为正,逆时针方向 为负。 为负 l B A A B
l
13
A
i
MAB
B
B
A
A
EI
B
l
B
A
i
MBA
M AB 4i 2i 6i A l B M 2i 4i 6i BA l
F M AB
A
i EI l
A
B
A
i EI l
A
B
1.结点转角未知量θ 结构有几个刚结点就有几个结点转角未知量。 A B C D
MBA 4iA
MBA 2iA
结构力学 第8章 位移法
6
杆端内力、位移的符号规定: 杆端内力、位移的符号规定:
●
杆端弯矩: 表示AB杆 端的弯矩 绕杆端顺时针 端的弯矩。 顺时针为正 杆端弯矩: MAB表示 杆A端的弯矩。绕杆端顺时针为正 杆端剪力:绕隔离体顺时针转为正(同前) 杆端剪力:绕隔离体顺时针转为正(同前)。 顺时针转为正 结点转角: 顺时针转为正。 结点转角:以顺时针转为正。 转为正 杆端的相对线位移:使杆件弦转角顺时针转动为正。 杆端的相对线位移:使杆件弦转角顺时针转动为正。 弦转角顺时针转动为正
1 2 3
杆14, 36: 两端固定
4 5 6
基本未知量3个。 基本未知量 个
杆12, 23, 25: 一端固定 一端铰结
23
又例:
m m
原结构
次超静定) (4次超静定) 次超静定
基本结构
次超静定) (5次超静定) 次超静定
24
§8—4 位移法的典型方程及计算步骤 4
基本未知量为: 基本未知量为:Z1、Z2 。 基本结构如图。 基本结构如图。 R1—附加刚臂上的反力矩 附加刚臂上的反力矩 F R2—附加链杆上的反力 附加链杆上的反力 l 据叠加原理, 则有 据叠加原理, 2 R1=R11+R12+R1P=0 R2=R21+R22+R2P=0
EI
可见, 不独立, 代入第一式: 可见,B=f (A、△AB), 不独立 代入第一式 MAB=3iA 式中 (转角位移方程) 转角位移方程) (固端弯矩) 固端弯矩)
l
t2
16
§8—3 位移法的基本未知量和基本结构 3
1.位移法的基本未知量 1.位移法的基本未知量
位移法的基本未知量是各结点的角位移和线位移, 位移法的基本未知量是各结点的角位移和线位移, 计算时应 各结点的角位移 独立的角位移和 数目。 首先确定独立的角位移 线位移数目 首先确定独立的角位移和线位移数目。 (1) 独立角位移数目 同一刚结点,各杆端转角相等一个独立的角位移未知量。 一个独立的角位移未知量 同一刚结点,各杆端转角相等一个独立的角位移未知量。 固定支座处,转角=0,已知量; =0,已知量 固定支座处,转角=0,已知量; 铰结点或铰支座各杆端的转角不独立,不必作为基本未知量。 铰结点或铰支座各杆端的转角不独立,不必作为基本未知量。 独立角位移数目= 独立角位移数目=结构刚结点的数目
结构力学8位移法
一端固定、一端简支
M AB
Δ AB 3iθ A 3i MF AB L
3iθ A Δ AB F FQAB 3i 2 FQAB L L 3iθ A Δ AB F F 3i 2 FQBA QBA L L
一端固定、一端定向
M AB iθ A iθ B M F AB F M BA iθ A iθ B M BA
1 qL2 41.7kN m 12
MF BC
F MCB
1 qL2 41.7kN m 12
设 EI 0 1
i BA i BE
4EI0 1 4 3EI0 3 4 4
i BC i CF
5EI0 1 5
i CD
4EI0 1 4
3EI0 0.5 6
§8-2 等截面杆件的刚度方程
两端固定 1、由杆端位移求杆端力 一端固定、一端简支 一端固定、一端定向
F M F FQij ij 2、荷载作用下求固端力
两端固定 3、等截面杆件的刚度方程 4、算例 5、计算步骤 一端固定、一端简支 一端固定、一端定向
弦转角
两端固定
Δ AB M AB 4iθ A 2iθ B 6i L M 2iθ 4iθ 6i Δ AB A B BA L
3iθ B 9
M BC 3iθB M F BC
MF Bc
1 2 2 62 qL 9kN m 8 8
算例2 求图示梁的弯矩图。
解: 1、基本未知量 θ B θ C 2、求各杆端弯矩 AB杆: BE杆:
M BA 3iBA θB M F BA
M BE 4iBE θ B M EB 2iBE θ B
结构力学第8章 矩阵位移法
单元两端的杆端位移分别在单元坐标系和整体坐标系 下分解,其位移分量就构成上面的杆端位移向量。
与坐标轴的正方向一致者为正;
返回目录
作业1:已知单元的内力图,列出单元坐标下 及整体坐标下的杆端力向量。
3.04
1.24
y 0.43
4.38N)
x
作业2:已知单元的杆端力如图,写出单元坐 标及整体坐标表示的单元杆端力向量,并 作出单元的内力图。
2EI
l
x
2EI EI
l 6EIl x x
l2
EuIj 1
6EIl
x
l 2 uj 1
EA
l
x
EI
EuIj 1
l
平l面梁单元ul j 的1 x单元刚度矩阵
l
y
ui=1
6EI
l2
N ElA i y
6EI
l
12 2EI l3
12EI
Qi
0l 3
y
2EI
0 Ml iy
2EI 6EI
l
l2
vi =1 θi=1
等截面直杆的刚度方程
适用于两端都是刚结点的杆, 基本未知量为杆两端的转角和侧移;
刚度方程:
M AB
4i A
2i B
6i
l
M BA
2i A
4i B
6i
l
QAB
QBA
1 l
(
M
AB
M BA)
QAB
QBA
6i l
A
6i l
B
1 2i l2
4i
❖ 写成矩阵的形式:
❖ 杆端弯矩、剪力、杆端 侧移均以绕杆端顺时针 为正。关键掌握每个系
结构力学 位移法
n EAi 2 ∑ ⋅ sin α i ∆ = F p li i =1
荷载之间的关系。 荷载之间的关系。 由基本方程得
(e)
上式就是位移法的基本方程 位移法的基本方程, 上式就是位移法的基本方程,它反映了结构的结点位移与结构的结点
Fp ∆= n EAi ⋅ sin2 αi ∑l i =1 i
由虎克定律得
(b)
图(a)
ui =
则:FN i
FN i l i EAi
(c)
∆
ui
EAi = u i (u i = ∆ sin α i ) (d) li
图(c)
上式就是拉压杆的刚度方程 它反映了杆端力F 与杆端位移u 拉压杆的刚度方程, 上式就是拉压杆的刚度方程,它反映了杆端力 N i与杆端位移 i 之间的 关系。 式代入(a)式得 关系。把(d)式代入 式得 式代入
F
p
2 1
Z
1
Z
1
Z
1
3
图(b) 图(a)
图(c)
如果能求出转角Z 则各杆( 杆 如果能求出转角 1,则各杆(12杆、13杆)的内力均可按前面的 杆 力法求得。因此,在位移法中,以结点位移 作为基本未知量 作为基本未知量, 力法求得。因此,在位移法中,以结点位移Z作为基本未知量,并以 单跨超静定梁作为基本计算单元,由此可知,用位移法分析刚架时, 单跨超静定梁作为基本计算单元,由此可知,用位移法分析刚架时, 需要解决下面三个问题: 需要解决下面三个问题: (1)位移法的基本未知量的数目(至少要求出多少个位移未知量) 位移法的基本未知量的数目(至少要求出多少个位移未知量) 位移法的基本未知量的数目 (2)单跨超静定梁分析 单跨超静定梁分析 (3)相应于基本未知量的位移法方程如何建立和求解。 相应于基本未知量的位移法方程如何建立和求解。 相应于基本未知量的位移法方程如何建立和求解
结构力学第8章 4-2
位移法基本方程是:附加刚臂的反力矩和附加链杆反力应为零的 630 r11Z1 r12 Z 2 R1P 0 平衡条件。 Z1
r21Z1 r22 Z 2 R2 P 0
23i
Z2
r11 4i 3i 7i 3i r21 2 3i 3i 15i r22 16 4 16
1
2
8-4 位移法算例
例1 试用位移法绘制图示刚架的弯矩图。
30kN 30kN
20kN/m
EI=常数
2m
4m
此刚架B点的左边部分为静定悬臂梁,其B端的弯矩 和剪力可由静力平衡条件得出,并将它们反向作用于 结点B上。
3
4m
R1P 30
R2 P 3 20 4 30 8 60
为计算系数项和自由项,绘出单位和荷载弯矩图, 如下:
14
单位弯矩图及荷载弯矩图
r11 12i r12 r21 4i
r22 20i
R1P 0
ql 2 3ql 2 Z1 , Z2 672i 672i 15
R2 P
ql 2 12
例4 用位移法计算排架
r11 Z1 R1P 0
r11 Z1 R1P 0
23
12i 18i 12i r11 2 2 2 l l l
R1P P
P Pl 2 Z1 12i 18i 12i 42i 2 2 2 l l l
24
用叠加法作弯矩图,即
M M1Z1 M P M1Z1 0 M1Z1
30
位移法典型方程为
r11Z1 r12 Z 2 R1P 0 r21Z1 r22 Z 2 R2 P 0
第8章位移法b
求出各系数后,不难进行具体计算。
§8.7*用位移法计算有斜柱的刚架
用位移法计算有斜柱的刚架时,在分析原理上与前面所述的矩形
刚架的计算方法是一样的,只是在计算典型方程的系数和自由项时要 复杂些。常用的方法有几何法和方程法两种。下面举例说明。如图
(a)所示带斜柱的刚架,作M图。
Fp
Z1
C 2EI EI D
(3)建立位移法方程
MBA
B
图(a) Z1 Z2
MBC
MCB
C
图(b) MCD
MBE
MCF
(a) 两端为固定
M AB 4i A 2i B M BA FQAB 6i F AB M AB l 6i F 2i A 4i B AB M BA l 6i 6i 12i F A B 2 AB FQAB l l l 6i 6i 12i F A B 2 AB FQBA l l l
如图(a)所示对称结构,受一般荷载作用。利用对称性可将荷载 分解成两组:对称荷载和反对称荷载两种情况。
2Fp
Fp
Fp
Fp
Fp
=
图(a)
Fp
+
图(b)
Fp
图(c)
图(d)
图(e)
正对称荷载部分:力法分析时有两个基本未知量,位移法分析时有 一个基本未知量,因此采用位移法计算较为方便。 反对称荷载部分:力法分析时有一个基本未知量,位移法分析时有两 个基本未知量,因此采用力法计算较为方便。
l
Fp
B 2i
Z2
C
1 几何法
B EI A
l
Z3
基本结构如图(b)所示 位移法典型方程为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
B 5I0 3I0 E
5m
C 4I0 D 3I0
F 4m
4m 6m
MCB 2iBC 1 4iBC 2 MCFB 21 42 41.7
MCD 3iCD 2 3 2
MBE 4iBE 1 3 1
MEB 2iEB 1 1.5 1
MCF 4iCF 2 2 2
MFC 2iFC 2 2
8-2位移法Ⅰ——直接平衡法
q=20kN/m
A 4I0 4m
B 5I0 3I0 E
5m
C 4I0 D 3I0
F 4m
4m 6m
M BA
3iBA
1
M
F BA
3
4EI0 4
1
20 42 8
3 1
40
MBC 4iBC 1 2iBC 2 MBFC 41 2 2 41.7
8-2位移法Ⅰ——直接平衡法
q=20kN/m
A 4I0 4m
12i/l2
A
B
FQ 12i / l 2
8-1 形常数和载常数
1
A
BA
B
A
B
3i
3i/l
M AB 3i
FQ 3i / l
A
B
3i/l
1
3i/l2
A
B
A
B
M AB 3i / l
FQ 3i / l 2
1 A
A
B
i
BA
i
B
M AB i MBA i
FQ 0
8-1 形常数和载常数
2 载常数
F AB
FP l
/2
M
F BA
FP l
/
2
FQF FP
BA
BA
B
M
F AB
EI
t1
t2
/
h
M
F BA
EI
t1
t2
/
h
FQF 0
8-1 形常数和载常数
1
A
B
A
B
1
1
A
B
A
B
1
1
A
B
8-1 形常数和载常数
q A
B
A
FP B
A
t1 t2
B
l/2 l/2
l
q A
FP
A
B
A
B
l/2 l/2
t1 t2
2 4.89
8-2位移法Ⅰ——直接平衡法
(4)求杆端弯矩
MBA 43.5kNm
MCD 14.7 kNm MCF 9.78kNm
(5)按照区段叠加法 作出弯矩图
MBC 46.9kNm MBE 3.4kNm MFC 4.89kNm
MCB 24.5kNm MEB 1.73kNm
11FP/16
B
A
B
5FP/16
M
F AB
3FPl
/ 16
FF Q AB
11FPl
/ 16
FF Q BA
5FPl
/ 16
A
t1 t2
B
A
B A
B
l
M
F AB
3EI t1
2h
t2
M
F BA
3EI t1
2h
t2
FQF
3EI t1
2hl
t2
8-1 形常数和载常数
q
ql2/3
ql
A
BA
BA
B
l
ql2/6
(3)建立隔离体平衡方程,求基本未知量
M BA
B
M BC
M BE
M BA M BE M BC 0
10 1 2 2 1.7 0L L L L L L (a)
C
M CB
MCD
MCF
MCB MCF MCD 0
2 1 9 2 41.7 0L L L L L L (b)
解(a)和(b),得 1 1.15
B点转角位移Δ1
8-2位移法Ⅰ——直接平衡法
(2)写出杆端弯矩
FP Δ1
A
B
M AB
2i
1
20 6 8
2i
1
15
M BA
4i
1
20 8
6
4i
1
15
q
B
C
Δ1
M BC
3i
1
2 62 8
3i
1 9
(3)利用隔离体的平衡方程求结点位移。
取B点为隔离体,建立B点的力矩平衡方程
M BA B M BC
解得
MBA MBC 0
q A
ql2/12
ql2/12
B
A
B
M
F AB
ql 2
/ 12
M
F BA
ql 2
/ 12
FP
A
B
l/2 l/2
FP l/8 A
FP l/8 B
M
F AB
FP l
/8
M
F BA
FP l
/
8
ql/2
A
B
ql/2
FF Q AB
ql
/
2
FF Q BA
ql
/
2
FP/2
A
B
FP/2
FF Q AB
FP
/
2
FF Q BA
1
6 7i
7i 1 6 0
8-2位移法Ⅰ——直接平衡法
(4)将结点位移代回杆端弯矩表达式。
M AB
2i
6 7i
15
16.72kN m
M BA
4i
6 7i
15
11.57 kN m
M BC
3i
6 7i
9
11.57 kN m
(5)按照区段叠加法作出弯矩图
16.72
11.57
3.21 15.85
第8章 位移法 8-1 形常数与载常数 8-2 位移法Ⅰ—直接平衡法 8-3 位移法Ⅱ—典型方程法 8-4 对称性利用 8-5 支座位移和温度变化时的计算
8-1 形常数与载常数
基本构件
形常数 三类基本构件由杆端单位位移引起的杆端弯矩和剪力. 载常数 三类基本构件在荷载作用下的杆端弯矩和剪力
要求:熟练背诵形常数和载常数,并能正确画 出相应的弯 矩图和剪力图
M
F AB
ql 2
/3
M
F BA
ql 2
/
6
FF Q AB
ql
FF Q BA
0
FP A
l/2 l/2
3FPl/8
FP
B
A
BA
B
FP l/8
M
F AB
3FPl
/8
M
F BA
FP l
/
8
FF Q AB
FP
FF Q BA
0
8-1 形常数和载常数
FP
FPl/2
A l
B
A
FP
BA
B
FPl/2
A
t1 t2
l
M
M图(kNm)
8-2位移法Ⅰ——直接平衡法
【例题】 试做图示刚架的弯矩图。各杆E相同。
4m 6m
q=20kN/m
A 4I0 4m
B 5I0 3I0 E
5m
C 4I0 D 3I0
F 4m
解 (1)基本未知量 B点顺时针转角位移Δ1
C点顺时针转角位移Δ2
8-2位移法Ⅰ——直接平衡法
(2)写出杆端弯矩 设EI0=1
l
B
8-1 形常数和载常数
q
A l
FP
B
A
B
l/2 l/2
A
FP B
A
t1 t2
B
l
l
8-2位移法Ⅰ——直接平衡法
1 无侧移结构
【例题】 试做图示刚架的弯矩图。各杆EI相同,i=EI/6。 FP=20kN,q=2kN/m。
FP
q
A
B
C
3m 3m
6m
FP Δ1
A
B
q
B
C
Δ1
【解】 (1)基本未知量
8-1 形常数和载常数
符号 结点转角、杆轴弦转角:顺时针为正。 杆端弯矩:绕杆端顺时针为正、绕结点逆时针为正。 ★ ★
剪力:以绕隔离体顺时针转动为正。
8-1 形常数和载常数
1 形常数
1
2i
A
B
ห้องสมุดไป่ตู้
A
BA
B
4i
6i/l
M AB 4i MBA 2i
FQ 6i / l
A
B
1
6i/l
A
B
6i/l
M AB 6i / l MBA 6i / l
FP
/
2
8-1 形常数和载常数
A
t1 t2
B
A
B A
B
l
M
F AB
EI
t1
t2
/
h
M
F BA
EI
t1
t2
/
h
FQF 0
q A
ql2/8
B
A
5ql/8
B
A
B 3ql/8
M
F AB
ql 2
/
8
FF Q AB
5ql
/8
FF Q BA
3ql
/
8
8-1 形常数和载常数
FP
A
B
l/2 l/2
3FP l/16 A