加速度传感器MMA7260在步态特征提取中的应用_侯向锋
基于MMA7260加速度传感器的电子计步器
作者简介:邢辉(1988-),男,武汉科技大学自动化系学生,研究 方向:自动化技术。
万方数据
- 17 -
基于MMA7260加速度传感器的电子计步器
作者: 作者单位: 刊名:
英文刊名: 年,卷(期): 被引用次数:
邢辉, 赵敏 武汉科技大学自动化系,湖北武汉,430081
中国高新技术企业 CHINA HIGH TECHNOLOGY ENTERPRISES 2010(22) 1次
3 LCD(JHD12864F)简介
3.1 功能结构介绍
JHD12864F 是一种具有 4 位 /8 位并行、2 线或 3 线串
行多种接口方式,内部含有国标一级、二级简体中文字库的点
阵图形液晶显示模块;其显示分辨率为 128×64,内置 8192
个 16*16 点汉字,和 128 个 16*8 点 ASCII 字符集 . 利用该
本文读者也读过(6条) 1. 苏丽娜.董金明.赵琦 基于加速度传感器的计步器系统[会议论文]-2007 2. 侯向锋.刘蓉.周兆丰.HOU Xiang-feng.LIU Rong.ZHOU Zhao-feng 加速度传感器MMA7260在步态特征提取中的应用[期刊论文]-传感技术 学报2007,20(3) 3. 王广文.陈洪亮.Wang Guangwen.Chen Hongliang 基于MMA7260车辆加速度测量系统开发[期刊论文]-电工技术2008(11) 4. 赵康德.张荣标.张业成.宋永献.Zhao Kangde.Zhang Rongbiao.Zhang Yecheng.Song Yongxian 基于MMA7260和μPD78F0547的水泵振动信 号采集器[期刊论文]-现代仪器2010(3) 5. 宋浩然.廖文帅.赵一鸣.SONG Hao-ran.LIAO Wen-shuai.ZHAO Yi-ming 基于加速度传感器ADXL330的高精度计步器[期刊论文]-传感技术 学报2006,19(4) 6. 曹赟.周宇.徐寅林.CAO Yun.ZHOU Yu.XU Yinlin 加速度传感器在步态信号采集系统中的应用[期刊论文]-信息化研究2009,35(9)
基于MMA7260加速度传感器的电子计步器

两
( maN.2 C uiy .8) u le316 0 ttO0 v N 1 O3
.
基于 MMA 2 0加速 度传感器 的电子计步器 76
邢 辉, 赵 敏
( 武汉科技 大学 自动化 系, 湖北 武汉 4 0 8 ) 3 0 1
E状 态
执 仃 作
结 果
高——一 >低
I 缓 ;— — >DR / O 中
由 MMA 2 0获取 步 态的加 速度信 号 , 76 单片机 A mea的 内置 T g
模 数 转 换 器 对 其 进 行 采 样 和 AD 转 换 后 , 得 到 了步 态 的 特 / 就
征数据 , 此数据 通过 并 口被 送入单 片机 中经过 一定的算 法 , 输
出在 L D 液 晶 显 示 屏 上 显 示 。 C
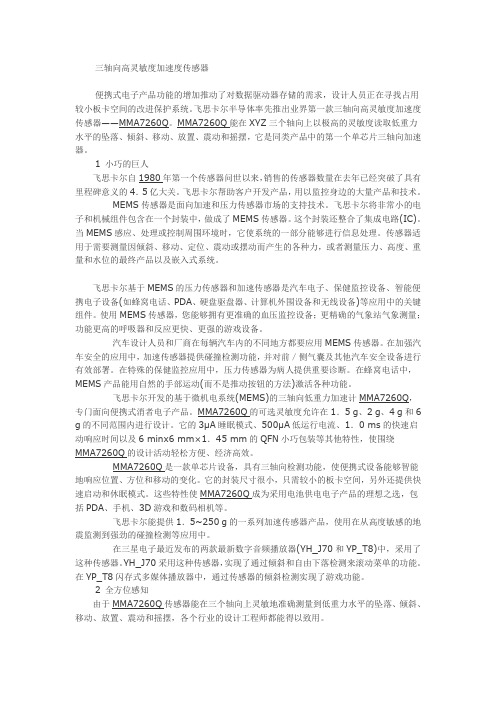
M MA 2 0是 Fe s a 76 re c l 司 的 三 轴 ( , 轴 , e公 X轴 Y Z轴 1
加速度传感器 , 好可以对人行走时 的三个方 向的加速度信号 正 进行检测 f 如下图所示 )从而更精确 的获取人行走时 的信息。 ,
一
l 一 5
A c lrt n — — + c eeai o ——
r
I
V
关 键 词 : 子 计 步 器 ; 速 度 传 感 器 ; 片 机 A m g l ; 晶 电 加 单 T ea 6 液
显 示 屏
图 2 MMA 2 0传 感 方 向 76
中图 分 类 号 : 6 ' l Rl
文献标识 码 : A
2 MMA 2 0简 介 76
21 功 能 介 绍 .
步态加速度信号的无线采集系统设计

步态加速度信号的无线采集系统设计
周兆丰;刘守印;侯向锋
【期刊名称】《单片机与嵌入式系统应用》
【年(卷),期】2007(000)005
【摘要】为实现步态加速度信号的无线采集,提出一种基于内嵌8051的无线收发芯片CC1010的有效方法.简要介绍步态加速度信号无线采集系统的工作原理,详细说明该系统的软硬件设计与实现.系统采用路由和重传机制,以确保数据的可靠传输.利用本采集系统成功建立一个36人的步态加速度数据库,可供不同领域的步态研究者进行分析.
【总页数】4页(P57-60)
【作者】周兆丰;刘守印;侯向锋
【作者单位】华中师范大学;华中师范大学;华中师范大学
【正文语种】中文
【中图分类】TP3
【相关文献】
1.32通道无线表面肌电和加速度信号采集系统设计 [J], 左鹏飞;路知远;张永强;董中飞;陈香
2.基于加速度计的步态数据无线采集系统设计 [J], 刘燕;李月香
3.步态加速度信号的无线采集系统设计 [J], 李雅
4.基于AVR的振动加速度信号采集系统设计 [J], 汪祖民;罗显成;孙慧琳;孙继武
5.基于FPGA的侵彻加速度信号采集系统设计 [J], 董胜飞;石云波;陈艳香;智丹;杨志才
因版权原因,仅展示原文概要,查看原文内容请购买。
基于加速度传感器的动作识别技术研究
基于加速度传感器的动作识别技术研究随着科技的不断推进,加速度传感器被日益广泛地应用于各个领域中。
其中,基于加速度传感器的动作识别技术已经成为了人们关注的焦点。
这项技术能够通过检测运动员身上的加速度传感器,来准确地识别出他们正在进行的动作,并从中提取出有用的信息。
在本文中,我们将详细探讨基于加速度传感器的动作识别技术的研究进展以及未来的发展方向。
一、技术背景加速度传感器是一种能够检测物体加速度的装置,它是一种微机电系统(MEMS)。
合成对数周期(SLP)算法、人工神经网络(ANN)算法和决策树算法是常用的动作识别技术。
加速度传感器技术在运动测量领域的应用非常广泛,例如,用于测量地震,检测楼房的结构是否牢固,还用于医学领域,例如,检测人类的步态是否正常。
二、基于加速度传感器的动作识别技术的研究进展基于加速度传感器的动作识别技术最初是用于运动医学和康复医学领域,虽然它在这些领域中的应用非常成功。
但是,现在这项技术已经扩展到了更广泛的领域,例如,人机交互界面、智能手环等。
而且,这项技术还可以用于控制机械臂、福利设施等。
这是因为加速度传感器技术可以帮助工程师们探索不同领域的新思路和方法。
对于动作识别技术的研究,有很多的应用场景和创新的可能性,同时也有很多挑战。
最近几年,人们一直在尝试发现一些新的方法和算法,以更准确地检测出不同的动作。
一项研究发现,加速度传感器可能会因载体的不稳定而出现误差。
因此,需要开展一些相关的研究工作,提高保真度,并且完善研究的标准化。
三、未来的发展方向除了应用场景和算法方面的研究,未来还需要在硬件设计方面进行更深入的探索。
例如,我们必须解决能源问题,保证加速度传感器可以长时间工作。
同时,还需要研究新型加速度传感器的性能和特性,这些传感器可以被用于新的领域,例如,运动物品追踪。
此外,基于加速度传感器的动作识别技术还发挥着越来越重要的作用,例如,通过识别运动员进行的动作,可以准确评估他们的运动能力,从而制定更好的训练计划。
三轴向高灵敏度加速度传感器
三轴向高灵敏度加速度传感器便携式电子产品功能的增加推动了对数据驱动器存储的需求,设计人员正在寻找占用较小板卡空间的改进保护系统。
飞思卡尔半导体率先推出业界第一款三轴向高灵敏度加速度传感器——MMA7260Q。
MMA7260Q能在XYZ三个轴向上以极高的灵敏度读取低重力水平的坠落、倾斜、移动、放置、震动和摇摆,它是同类产品中的第一个单芯片三轴向加速器。
1 小巧的巨人飞思卡尔自1980年第一个传感器问世以来,销售的传感器数量在去年已经突破了具有里程碑意义的4.5亿大关。
飞思卡尔帮助客户开发产品,用以监控身边的大量产品和技术。
MEMS传感器是面向加速和压力传感器市场的支持技术。
飞思卡尔将非常小的电子和机械组件包含在一个封装中,做成了MEMS传感器。
这个封装还整合了集成电路(IC)。
当MEMS感应、处理或控制周围环境时,它使系统的一部分能够进行信息处理。
传感器适用于需要测量因倾斜、移动、定位、震动或摆动而产生的各种力,或者测量压力、高度、重量和水位的最终产品以及嵌入式系统。
飞思卡尔基于MEMS的压力传感器和加速传感器是汽车电子、保健监控设备、智能便携电子设备(如蜂窝电话、PDA、硬盘驱盘器、计算机外围设备和无线设备)等应用中的关键组件。
使用MEMS传感器,您能够拥有更准确的血压监控设备;更精确的气象站气象测量;功能更高的呼吸器和反应更快、更强的游戏设备。
汽车设计人员和厂商在每辆汽车内的不同地方都要应用MEMS传感器。
在加强汽车安全的应用中,加速传感器提供碰撞检测功能,并对前/侧气囊及其他汽车安全设备进行有效部署。
在特殊的保健监控应用中,压力传感器为病人提供重要诊断。
在蜂窝电话中,MEMS产品能用自然的手部运动(而不是推动按钮的方法)激活各种功能。
飞思卡尔开发的基于微机电系统(MEMS)的三轴向低重力加速计MMA7260Q,专门面向便携式消者电子产品。
MMA7260Q的可选灵敏度允许在1.5 g、2 g、4 g和6 g的不同范围内进行设计。
基于加速度传感器的速度及路程测量系统
Sk
h ( f ( xk ) 4 f ( x 1 ) f ( xk 1 )) k 6 2
Simpson 公式中每一个小微段用到三个点积分,所以我们积分时对每三个点进行积分从 而得到如下的公式
其中
h
是采样周期的二倍,
n
a 为采集到的加速度,n 为信息处理的周期。
n/ 2 n/ 2 h Vt Vk (a0 4 a2 k 2 a2 k 1 an ) 6 k 0 k 1 k 1
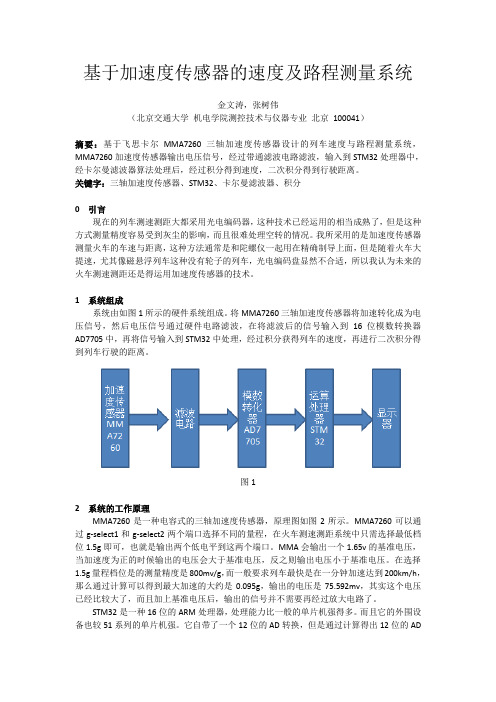
图1 2 系统的工作原理 MMA7260 是一种电容式的三轴加速度传感器,原理图如图 2 所示。MMA7260 可以通 过 g-select1 和 g-select2 两个端口选择不同的量程,在火车测速测距系统中只需选择最低档 位 1.5g 即可,也就是输出两个低电平到这两个端口。MMA 会输出一个 1.65v 的基准电压, 当加速度为正的时候输出的电压会大于基准电压,反之则输出电压小于基准电压。在选择 1.5g 量程档位是的测量精度是 800mv/g, 而一般要求列车最快是在一分钟加速达到 200km/h, 那么通过计算可以得到最大加速的大约是 0.095g,输出的电压是 75.592mv,其实这个电压 已经比较大了,而且加上基准电压后,输出的信号并不需要再经过放大电路了。 STM32 是一种 16 位的 ARM 处理器, 处理能力比一般的单片机强得多。 而且它的外围设 备也较 51 系列的单片机强。它自带了一个 12 位的 AD 转换,但是通过计算得出 12 位的 AD
图2
图3 系统软件流程图 软件系统采取的是卡尔曼滤波器对数据进行软件滤波,然后再利用辛普森公式进行积 分,软件流程图如图 4 所示。卡尔曼滤波器(Kalman Filter)是一个最优化自回归数据处理 算法(optimal recursive data processing algorithm) 。对于解决很大部分的问题,他是最优, 效率最高甚至是最有用的。他的广泛应用已经超过 30 年,包括机器人导航,控制,传感器 数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处 理,例如头脸识别,图像分割,图像边缘检测等等。 现设线性时变系统的离散状态防城和观测方程为: X(k) = F(k,k-1)· X(k-1)+T(k,k-1)· U(k-1) Y(k) = H(k)· X(k)+N(k) 3 其中 X(k)和 Y(k)分别是 k 时刻的状态矢量和观测矢量 F(k,k-1)为状态转移矩阵 U(k)为 k 时刻动态噪声 T(k,k-1)为系统控制矩阵 H(k)为 k 时刻观测矩阵 N(k)为 k 时刻观测噪声 则卡尔曼滤波的算法流程为: 预估计 X(k)^= F(k,k-1)· X(k-1) 计算预估计协方差矩阵 C(k)^=F(k,k-1)×C(k)×F(k,k-1)'+T(k,k-1)×Q(k)×T(k,k-1)' Q(k) = U(k)×U(k)' 计算卡尔曼增益矩阵 K(k) = C(k)^×H(k)'×[H(k)×C(k)^×H(k)'+R(k)]^(-1) R(k) = N(k)×N(k)' 更新估计 X(k)~=X(k)^+K(k)×[Y(k)-H(k)×X(k)^] 计算更新后估计协防差矩阵 C(k)~ = [I-K(k)×H(k)]×C(k)^×[I-K(k)×H(k)]'+K(k)×R(k)×K(k)' X(k+1) = X(k)~ C(k+1) = C(k)~ 重复以上步骤 在对加速度信号进行处理之后我们得到了一组可以积分的加速度信号。 为了获得比较 高的积分精度,我们采用了 Simpson 公式进积分 在每个小区间 xk , xk 1 使用 Simpson 公式
基于三轴加速度传感器的手势识别_刘蓉

基于三轴加速度传感器的手势识别刘 蓉a ,刘 明b(华中师范大学 a. 物理科学与技术学院;b. 计算机科学系,武汉 430079)摘 要:针对手势交互中手势信号的相似性和不稳定性,设计实现一种基于三轴加速度传感器的手势识别方案。
采用MMA7260加速度传感器采集主手腕的手势动作信号,根据手势加速度信号的特点,进行手势动作数据窗口的自动检测、信号去噪和重采样等预处理,通过提取手势动作的关键特征,构造离散隐马尔可夫模型,实现手势动作识别。
实验结果证明该方案的识别精度较高。
关键词:加速度传感器;手势识别;人机交互;信号处理;离散隐马尔可夫模型Gesture Recognition Based on Three-axial AccelerometerLIU Rong a , LIU Ming b(a. College of Physical Science and Technology; b. Department of Computer Science, Central China Normal University, Wuhan 430079, China) 【Abstract 】Aiming at similarity and instability of gesture activity signal in gesture interaction, a gesture recognition scheme based on three-axial accelerometer is presented. It utilizes a MMA7260 accelerometer to capture the acceleration signal of dominant wrist. An activity detection algorithm is used to auto determine the data stream which containing interesting motion according to the features of gesture activity signal. After denoising and resampling the acceleration data streams, gesture features are extracted, and Discrete Hidden Markov Model(DHMM) is built for gesture recognition. Experimental results demonstrate the effectiveness of the scheme.【Key words 】accelerometer; gesture recognition; human-computer interaction; signal processing; Discrete Hidden Markov Model(DHMM) DOI: 10.3969/j.issn.1000-3428.2011.24.047计 算 机 工 程 Computer Engineering 第37卷 第24期V ol.37 No.24 2011年12月December 2011·人工智能及识别技术· 文章编号:1000—3428(2011)24—0141—03文献标识码:A中图分类号:TP391.411 概述手势交互是近几年人机交互领域的研究热点,与传统人机交互模式相比,基于手势的交互更自然便捷。
基于关键点提取的人体活动识别

基于关键点提取的人体活动识别
郭华峰;向长城;宋礼文;陈世强
【期刊名称】《湖北民族大学学报:自然科学版》
【年(卷),期】2022(40)2
【摘要】为改变活动识别复杂度高和活动识别率低的问题,提出了一种针对关键点提取的活动识别算法.该方法对加速度传感器采集的加速度信号进行了关键点的提取,混合隐马尔科夫回归模型(mixed hidden Markov regression
model,MHMRM)对观测样本序列输出并进行建模,最大限度地通过关键点序列保留多维信号之间的特征信息,然后通过期望最大化算法(expectation maximization,EM)对模型参数进行优化并建立算法模型,使用维特比算法分割数据最终状态.使用不同活动顺序的测试集对算法性能进行测试,包含了站立、坐、躺、步行、上楼、下楼、慢跑、跳等几类活动.实验结果表明,提出的算法以关键点抽样的方式保留数据整体特征,实现快速准确地人体活动识别,其平均识别准确率为94.06%.因此,采用此方法可有效地对人体的活动信息进行分割识别,实现对人体活动的准确检测.
【总页数】6页(P190-195)
【作者】郭华峰;向长城;宋礼文;陈世强
【作者单位】湖北民族大学数学与统计学院;湖北民族大学智能科学与工程学院;湖北民族大学新材料成型及装备技术产学研中心
【正文语种】中文
【中图分类】TP181
【相关文献】
1.基于关键帧轮廓特征提取的人体动作识别方法
2.基于人脸检测和关键点识别的快速人体组件划分
3.基于人体关键点的分心驾驶行为识别
4.监控视频中基于人体关键点的步态识别研究
5.基于人体关键点的吸烟行为识别方法研究
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第20卷 第3期2007年3月传感技术学报CHINESE JO URNAL OF S ENSO RS AND ACTU ATORSVol.20 No.3Mar.2007Application of Accelerometer MMA7260in the Gait Feature ExtractionH OU X iang -feng ,LIU Rong *,ZH OU Zhao -f eng(Dep artment o f E lectr onic In formation an d Eng ineering ,Hua Zhong Norma l University ,Wuh an 430079,China )A bstract :Introduces the principle o f acceleromete r M M A7260and discusses a direct and effective method fo r g ait feature ex traction w ith MM A7260.In order to extract g ait feature ,a test system ,w hich is mainly com po sed o f M MA7260and microco ntro ller ADUC841,is desig ned.After capturing the accele ration signal of g ait through adopting M MA7260,the sig nal is sampled and co nverted to the characteristic data via the built -in ADC of microcontro ller.Then the characteristic data of gait are saved in SRAM.H aving transmit -ted the characte ristic data of gait to the com pute r through serial po rt ,we can see their w avefo rm via the Matlab.This verifies the method is effective.Key words :acceleratio n sensor ;gait feature ;A /D conversion EEACC :7230加速度传感器M M A7260在步态特征提取中的应用侯向锋,刘 蓉*,周兆丰(华中师范大学电信系,武汉430079)收稿日期:2006-05-15 修改日期:2006-05-15摘 要:介绍加速度传感器M M A 7260的工作原理、结构及功能,提出了一种采用M M A 7260提取步态特征的有效方法.实验中,M M A 7260与微控制器AD UC841组成一个测试系统,由M M A 7260捕获步态的加速度信号,微控制器的内置模数转换器对其进行采样和A /D 转换后,就得到了步态的特征数据,将其存储到静态存储器中.步态特征数据通过串口被送入计算机,借助于M atlab 可以看到周期性的步态特征信号波形.关键词:加速度传感器;步态特征;A /D 转换中图分类号:TP212.1 文献标识码:A 文章编号:1004-1699(2007)03-0507-05 步态就是人走路的姿势.作为一种生物特征,它具有不受距离影响、非侵犯性、难以伪装、受环境影响小等独特的优点,因而近年来倍受关注.国内外的许多知名大学和研究机构如美国麻省理工学院、中国科学院自动化研究所等都广泛展开了步态识别研究工作[1].步态特征的独特性为人的身份识别提供了有效线索,对医疗上的异步病态、偏瘫等疾病的预防、诊断和康复也可以起到很显著的辅助作用.而且,在现代化的体育训练中,也可以通过步态特征来监测运动员的体能消耗情况、动作准确程度等,从而制定出科学的训练方案.此外,步态在机器人的行走、人的行为理解等科学研究上也占有举足轻重的地位.步态特征提取是步态特征应用的前提.目前,主流的步态特征提取是基于图像的,主要方法可分为两大类:基于模型和基于特征.基于模型的方法是将人用合适的模型表示,如Lee [2]采用七个椭圆表示人的侧面二值化图像的身体的不同部分,每个部分用一个椭圆表示;Yoo 等[3]根据解剖学的知识,计算人体各个关键部位的运动学特征;Cunado 等[4]将大腿建模为链接的钟摆,从其倾斜角度信号的频率分量中获取步态特征.基于特征的方法是直接从人体图像当中提取出步态的特征数据,如Amit Kale 等[5]、王亮等[6]把人的二值化图像的侧面外轮廓作为步态的特征;J.Little 和J.Boy d [7]把步态序列图像的光流的频率和相位信息作为步态特征.以上方法都是建立在视频处理、图像处理的基础上,在下面的假设下进行的:①假设人的行走方向与摄像机的镜头主轴的方向垂直.②假设摄像机静止,并且摄像机的视角范围内只有一个人在运动.然而,动态环境中拍摄的图像结果会受光照变化、运动目标的影子等多方面因素的影响,这会给基于图像的步态特征提取带来了较大困难.所以,H eikki Ailisto等[8-9]提出一种采用加速度传感器来获取步态特征的方法,避免了动态环境中多方面因素对捕捉图像的不利影响,降低了数据处理的难度,开辟了步态特征获取的新途径.但此方法采用装备有DAQ1200数据采集卡的笔记本电脑来采集数据,不仅成本高,而且不便于测试对象携带.本文提出了一种基于加速度传感器的步态特征提取方案.该方案采用Freescale公司的三轴加速度传感器M MA7260测量步态的加速度信号,并用ADI公司的微控制器ADUC841作为核心控制器,控制其内置的模数转换器对加速度信号进行采样、A/D转换,然后将数据存储在静态存储器中.该测试系统由便携式蓄电池组为其供电,可脱机使用.根据需要,步态特征数据还可通过串口传送到计算机中,以供不同领域的研究者进行分析.1 M M A7260简介1.1 功能介绍MM A7260是美国Freescale公司最新推出的一款低成本单芯片三轴加速度传感器.该微型电容式加速传感器融合了信号调理、单极低通滤波器和温度补偿技术,并提供了四种加速度测量范围,分别为:±1.5g n、±2g n、±4g n和±6g n.M MA7260还具有很高的灵敏度,当选择±1.5g n的测量范围时,灵敏度达到800m V/g n.它采用6m m×6mm ×1.45mm QFN的封装,体积超小,只需很小的板卡空间.而且,M MA7260提供休眠模式,是电池充电的手持设备产品的理想之选.它具有三轴向检测功能,使便携式设备能够智能地回应位置、方位和移动的变化.MM A7260的其主要特性如下.①XYZ:具有三轴向的感应功能;②可选的加速度范围:±1.5g n、±2g n、±4g n 和±6g n;③低电流消耗:500μA;④休眠模式:3μA;⑤低电压运行:2.2~3.6V;⑥快速启动时间:1m s;⑦低噪音:达到更高的分辨率、更高的精确度;⑧超小体积:6mm×6mm×1.45mm QFN封装;⑨高灵敏度:800mV/g n@1.5g n.由于MM A7260传感器可准确测量三轴低量级下降、倾斜、移动、定位、撞击和震动,因此在H DD 保护、M P3播放器、游戏、便携式电子设备中得到了广泛的应用.本设计中则采用M MA7260来测量人走路时三维的加速度信号.1.2 结构与原理M MA7260的功能如图1所示.X、Y、Z三个相互垂直方向上的加速度由G-Cell传感单元感知,经过容压变换器、增益放大、滤波器和温度补偿后以电压信号输出.图1 M M A7260功能框图G-Cell传感单元是由半导体材料经微机械加工艺生产的微机械结构,整个物理模型由一对挠性轴、其支撑的极板及中间极板上的检测质量块组成.G-Cell的极板构成了两个背对背的平板电容,如图2所示.当系统被给定一加速度时,检测质量块所附属的中间极板就会偏离无加速度时的位置,这样它到一边固定极板的距离就会增加,同时到另一固定极板的距离就会减小.因此电容值也随着极板间距离的改变而改变,这就是对加速度的度量.电容值经过容压变换器转换为电压值,进过增益放大器、滤波器和温度补偿以电压的形式作为输出信号图2 G-Cell单元的物理模型1.3 引脚配置M MA7260的三个相互垂直的传感方向如图3所示.M M A7260的引脚配置如图3和表1所示.表1 M M A7260引脚功能引脚序号引脚名称描述1g n-Select1输入逻辑电平,选择灵敏度的级别2g n-Select2输入逻辑电平,选择灵敏度的级别3V DD电源输入4V SS电源地508传 感 技 术 学 报2007年续表引脚序号引脚名称描述5-11N /C 悬空12Sleep M ode 休眠模式13Z OUT Z 方向输出电压14Y OU TY 方向输出电压15X OUT X 方向输出电压16N /C悬空图3 M M A 7260的传感方向2 步态特征提取电路的设计2.1 硬件电路设计在步态特征提取中,首先使用MM A7260来获取三维步态加速度信号,然后传送给微控制器ADUC841进行处理.ADUC841是ADI 公司最新推出的一款高集成度的微控制器,其内核是优化的8052,执行速度达20M I /s.ADUC841芯片内提供了一个高精度、低偏差并经过工厂校准的2.5V 参考电压.它内置有8个独立的12bit 模数转换通道、2个独立的12bit 数模转换通道和温度传感器.MM A7260和ADUC841的集成度都很高,使得步态特征提取测试系统的硬件设计大大简化.在ADUC841与M MA7260的接口中,首先要考虑噪声问题.因为M MA 7260内部采用了开关电容滤波器,有时钟噪声产生,所以需要在M MA7260的XOU T 、YOU T 和ZO UT 三个输出端分别接RC 滤波器,如图4所示.图4 M M A7260Q 与AD UC841接口原理图MM A7260输出的步态加速度信号是模拟信号,必须将其转换为数字信号.这就要考虑传感器MM A7260的输出电压和微控制器ADUC841内置模数转换器输入电压范围的匹配问题.本文在设计时将MM A7260的g -Select1和g -Select2两引脚均置为逻辑低电平,即选择了加速度的范围为±1.5g n.在保证M M A7260处于测试标准位置的情况下,其X 轴和Y 轴的输出电压为0.45~2.85V ,Z 轴的输出电压为1.25~3.65V ,而ADUC841的ADC 只可以接受0~ 2.5V 的电压.显然M MA7260的输出电压有可能超过ADUC841的ADC 的电压接受能力.因此在M MA7260与ADUC841接口的电路中采用了4.7k Ψ和10k Ψ电阻分压,这样既可保持信号的形状,又可使M MA7260的输出符合ADUC841的输入要求.另外,为了增强前后级电路间的阻抗匹配能力,在接口电路中XOU T 、YOUT 和ZOU T 三个通道中都采用了由运放OP491组成的射随电路.它对步态特征信号还有一定的驱动作用,增强了由M MA7260等组成的前级电路的带负载能力.由于M M A7260固有的内部采样频率为11kH z ,设计电路时其外部电源供电开关频率及ADUC841的A /D 采样频率都应不与之干扰,以防产生混叠误差.为了更准确的获取步态加速度信号,在硬件电路实现时,还应保证MM A7260与ADUC841的物理连接距离最短,以减少寄生电阻、寄生电容的产生,防止加速度信号的衰减和噪声的干扰.上述设计电路中我们选用了IS62C256来存储得到的步态加速度信号.当然这里静态存储器的大小可以根据研究者对数据精确度和脱机时间等不同的要求来进行选择.2.2 软件系统设计由M MA7260获取的步态加速度信号,经ADUC841内置的模数转换器采样、A /D 转换后,存储于静态存储器中.X 轴、Y 轴和Z 轴三个方向上的数据分别占用了ADUC841的第一个、第二个和第三个模数转换通道.本文采用了500H z 的采样频率.根据实验分析的要求,X 轴、Y 轴和Z 轴三个方向上均需要记录4000个数据,每个数据占用2byte ,于是在静态存储器中为三个方向的数据分别分配了10kB 的存储空间.本文设计时选用了ADUC841的三个16位定时/计数器中的Tim er0来产生定时中断,以保证500Hz 的采样频率.主程序包括初始化、判断数据采集按钮和传送数据按钮是否按下以及向计算机传输数据等程序.在Timer0初试化程序中,设置TL0=0x E0,T H0=0xB1,控制主程序每2m s 产生一次509第3期侯向锋,刘 蓉等:加速度传感器M M A7260在步态特征提取中的应用中断.在中断处理中,依次对X 轴、Y 轴和Z 轴三个方向上的信号进行采样、A /D 转换和存储数据,其流程图如图5所示.图5 程序流程图显然,在按下数据采集按钮8s 后,就可采集到4000个数据.采集的数据通过串口向计算机传送,并被保存下来,以供进一步研究.3 实验与结果分析为了检测步态特征提取电路的可行性,我们做了以下实验:测试系统由8.6cm ×6.0cm 的主电路板及附属电源组成,在实验中本测试系统由测试对象随身携带,全部放在腰带的正后方,像携带手机一样,只是位置在脊椎骨与腰带的交叉点处,同时保证MM A7260处于测试标准位置,即其X 轴的正方向指向人前进的方向,Y 轴的正方向指向人体的正左方,Z 轴的正方向指向人体的正上方.测试对象共10个人,其中5男5女,年龄在24~26周岁.测试对象均以正常的步速行走8s.每一次测试中,要求每个测试对象分别穿平跟鞋和高跟鞋,以测试出2组数据.实验每隔两天做一次,一共做3次.结果共得到60组数据,每组数据中都含有X 轴、Y 轴和Z 轴三个方向上的数据.实验中,对所有测试对象的X 轴、Y 轴和Z 轴三个方向的数据都采用相同的方式进行处理.每个测试对象测试完毕后,通过串口就可以看到测量到的三个方向的步态加速度数据,如图6所示.图6中的每列数据逗号前的数字表示数据所占模数转换的图6 测量到的步态加速度数据通道号,逗号后的数据就是相应通道的加速度数据.计算机接收到这些数据后,首先对这些数据进行归一化处理,使其都在0~1的范围内.这样,在M atlab 中利用PLOT ()函数,就可以形象地看到步态特征信号的波形.下面以8号测试对象的Z 轴方向上的数据为例进行说明.8号测试对象Z 轴方向的部分步态加速度数据,如图6中第三列数据所示.在M atlab 中,可以得到其相应的波形,如图7所示.从信号的轮廓可以看出,步态信号是周期性信号.因为“左”步态和“右”步态不一定完全对称,因此信号被划分为a 步态和b 步态.图7 8号测试对象Z 轴方向的加速度信号图8为6号和8号测试对象在Z 轴方向的速度信号.图9为6号和8号测试对象在X 轴方向的加速度信号.由于不同测试对象Y 方向的信号差异小,所以这里只给出了X 轴和Z 轴两个方向上的加速度信号对比.由图8和图9可以看出:不同的测试对象,其加速度信号的幅度、周期以及变化的速率等有着明显的差异.除了对不同测试对象在X 轴和Z 轴方向的加速度信号做对比以外,本文对同一测试对象在不同时间(3天中的任意两天)的X 轴和Z 轴方向的加速度信号也做了对比.实验结果表明:在X 轴或Z 轴方向上,同一测试对象的步态加速度信号具有很大的相似性.图8 6与和8号测试对象Z轴方向加速度信号图9 6号和8号测试对象X 轴方向加速度信号510传 感 技 术 学 报2007年4 结 论通过以上实验得知,集成信号调理电路的MM A7260大幅度简化电路设计,同时因为MM A7260采用3.3V电源供电,功耗也大大降低.在我们的测试测试系统中,M MA7260的功耗,信号稳定性和灵敏度都达到了预期的效果.本文提出的基于M M A7260的步态特征提取方法,具有直接、有效的优点.该设计不但避免了动态环境中多方面因素对捕捉图像的不利影响,降低了数据处理的难度,而且性价比高,体积小,便于携带,可以应用于人的身份识别、医疗技术、体育训练以及运动健身等领域,具有实际应用的价值.实验是在假设步态特征提取测试系统处于标准位置的情况下进行的.如果步态特征提取测试系统偏离标准位置,测试信号就会受到影响.所以,在下一步的工作中,我们将进一步研究如何解决步态特征提取测试系统所处位置对提取信号的影响.参考文献:[1] http://w /ito/res earch/hid/index.html[EB/OL].[2] Lily Lee.Gait Analysis fo r Classification[R].AI Technical Re-port2003-014,M assachu setts Institute of Tech nology-artificialIntelligen ce Laboratory,2003.[3] Yoo J H,Nix on M S,Harris C J.Extracting Gait Signatu resBased on Anatomical Know ledge[C]//P roceedings of BM VASym posium on Advancing Biometric Techn ologies,2002.[4] Cu nado D,Nix on M,Carter ing Gait as a Biom etric,ViaPhase-W eigh ted M agnitude S pectra[C]//P roc InternationalConference on Audio-and Video-based Biometric Person Au-thentication,C rans-M on tana,S witz erland,1997.95-102.[5] Amit Kale,A N Rajagopalan,et al.Identification of Hum ansUsing Gait[J].IEEE T ransactons on Image Processing.2004,13(9):1163-1173.[6] 王亮,胡卫明,谭铁牛.基于步态的身份识别[J].计算机学报,2003,26(3):353-360.[7] J Little,J Boy d.Recognizing People by Their Gait:The Shapeof M otion[J].Videre:J ou rnal of Computer Vision Research,The M I T Press,1998,1(2):1-32.[8] Heikki Ail isto,M ikko Lindh olm,et al.Identifying Peoplefrom Gait Pattern w ith Accelerometers[C]//Proceedings ofSPIE.2005,5779:7-14.[9] Jani Män tyjärvi,M ikko Lindholm,et al.Identifying Users ofPortab le Devices from Gait Pattern w ith Accelerometers[C]//IEEE Intern ational Conference on Acoustics,S peech,and Sig-nal Proces s ing.2005,2:973-976.侯向锋(1980-),女,硕士研究生,主要研究方向智能信息与模式识别,xfh@.cn.刘 蓉(1969-),女,副教授,研究方向为模式识别与智能信息处理,liur ong@.511第3期侯向锋,刘 蓉等:加速度传感器M M A7260在步态特征提取中的应用。