第四章 基于粒子滤波的多视觉特征自组织融合的稳健跟踪
基于粒子滤波和多示例学习的目标跟踪

基于粒子滤波和多示例学习的目标跟踪
罗萱
【期刊名称】《计算机应用与软件》
【年(卷),期】2014(031)008
【摘要】目标跟踪是计算机视觉领域中研究的热点问题.当前,基于多示例学习的目标跟踪算法引起了较多的关注.在研究多示例学习算法的基础上,针对原始的多示例学习目标跟踪算法中使用运动模型的不足,提出一种改进的基于在线学习的目标跟踪方法.该方法首先根据方向直方图局部特征(HOG特征)来描述目标,然后通过粒子滤波方法对目标位置进行预测,再用基于Boosting的在线多示例学习方法来建立描述目标的模型和分类器,最后在下一帧的图像中利用该分类器来跟踪目标,同时在线更新分类器.通过实验表明,改进的方法可以有效地提高目标跟踪精度和算法的鲁棒性.
【总页数】5页(P186-190)
【作者】罗萱
【作者单位】重庆青年职业技术学院计算机科学系重庆400712
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于在线多示例学习的协同训练目标跟踪算法 [J], 李飞;王从庆;周鑫;周大可
2.基于RGB-D的在线多示例学习目标跟踪算法 [J], 高毅鹏;郑彬;曾宪华
3.基于加速鲁棒特征和多示例学习的目标跟踪算法 [J], 白晓红;温静;赵雪;陈金广
4.基于高效多示例学习的目标跟踪 [J], 彭爽;彭晓明
5.基于相关相似度的在线多示例学习目标跟踪算法 [J], 陈敏;张清华;陈晓森;陈江湖;谢思齐;陈思;
因版权原因,仅展示原文概要,查看原文内容请购买。
基于多特征选择及粒子滤波的目标稳健跟踪

基于多特征选择及粒子滤波的目标稳健跟踪孟犇;胡暾;杨杰【期刊名称】《计算机仿真》【年(卷),期】2011(28)1【摘要】研究机器人视觉问题,目标跟踪是当前计算机视觉及图像处理领域研究的热点问题,具有广泛的应用价值.目标建模是目标跟踪中的关键技术,目标模型的好坏直接影响到跟踪算法的性能.在复杂的场景中,尤其是背景与目标区分度较低的情况下采用图像单一特征建模往往无法取得理想的跟踪效果.提出一种多特征选择及粒子滤波的目标跟踪方法,以粒子滤波为跟踪框架,采用颜色和纹理特征对目标进行建模以减弱复杂背景的影响;跟踪过程中,通过对数似然比方法在线选择能区分目标和背景的最佳特征来描述目标,并更新目标模型以适应目标周围背景的变化,并进行仿真.结果表明方法在复杂背景的情况下具有鲁棒性和快速性.%With a wide range of applications, object tracking has become a research hotspot in computer vision and image processing. Object modeling is the key step in object tracking. The performance of a tracking algorithm is directly affected by the accuracy of the object model. The tracking result is not effective when modeling is based on single image feature with complex backsround, especially low distinctive environment. Based on multi-features selection and particle filter, a robust tracking algorithm is proposed in this paper. In the framework of the particle filter, color and texture features are employed to represent the object to reduce the influence of the complex background. During tracking, a model updatingstrategy based on on-line feature selection is used to select the most discriminative features which can effectively distinguish the object from the changing background. The experimental results show the proposed algorithm is effective and robust in complex background.【总页数】5页(P186-189,276)【作者】孟犇;胡暾;杨杰【作者单位】上海交通大学图像处理与模式识别研究所,上海,200240;上海交通大学图像处理与模式识别研究所,上海,200240;中国航天科工集团第二研究院,北京,100854;上海交通大学图像处理与模式识别研究所,上海,200240【正文语种】中文【中图分类】TP391.4【相关文献】1.基于多特征信息融合粒子滤波的红外目标跟踪 [J], 孙艳丽;周伟;李建海2.基于多特征的退火粒子滤波视觉目标跟踪算法 [J], 赵迎春;郭强3.基于多特征自适应融合的粒子滤波目标跟踪算法 [J], 董娜;刘军4.基于多特征融合的权值优化粒子滤波目标跟踪 [J], 熊杰;吴晓红;卿粼波;何小海;尤晓建5.基于多特征融合的转移粒子滤波红外小目标跟踪算法研究 [J], 霍富功;王诗琴因版权原因,仅展示原文概要,查看原文内容请购买。
基于粒子滤波和多特征融合的目标跟踪算法
cl l in fh a i e egtMen hl te e h s gfr o r n rc rl r ajs daat e . h a ua o te rc i . aw i ,h i s fu i l ds ut awee d t pi l T e c t o p tlw h e w g of n o c o a t u u e d v y
d veo e y u ig t r e a e e ma e e l p d b sn ag t y lv li g .Th wo f au e r u e n t e fa fp ril l r h e l k i e e t e t r swe e f s d i h r me o atce f t ,t i st i e n h
构信 息的融合系数.实验表 明,该算法 的稳定性较高,同时提 高了跟踪 的精度。 关键词 : 粒子滤波;加权 颜色直方 图;结构模型;融合 Bae nP rilFl r n l— au e uin ‘ jc akn o i m sdo at e ie dMutf tr s T Al t c t a ie F o
c n io s f lt r d b c g o n s a t c ig ag r h c mb nn ec l ra d s u tr l n o ma in Wa r p s d o d t n ut e a k r u d , a kn lo i m o i ig t o o n r c a f r t Sp o o e . i o c e r t h t u i o W eg td c l rh s g a b s d o V s u e o d s r e t e c l r d l ft e tr e, tu tr lmo e wa i he o o i o r m a e n HS wa s d t e c b h oo t i mo e ag t a s cu a d l s o h r
基于粒子滤波的多自由度运动目标跟踪

基 于 粒 子ห้องสมุดไป่ตู้滤 波 的 多 自 由度 运 动 目标 跟 踪
王国 良, 刘金 国
( 中国科学院 长春光学精密机械与物理研究所, 吉林 长春 103 ) 303
摘 要 : 了 在 复杂 背 景 下 跟 踪 视频 序 列 中的 多 自 由度 运 动 目标 , 于粒 子 滤 波 理 论 提 出 了一 种 多 自由度 运 动 目标 的稳 健 为 基
s a eo h b etwe eu d td t d u tk r e— a d d h a d mo iyt esz ftak n n o h p ft eo jc r p a e o a j s e n lb n wit n df h ieo rc i g wi d w,
c mp e a k r u d,a ta kn lo i m o li e r eo—re o mo i g o jcs wa r p s d o lxb c g o n r c ig ag r h f rmu t d g e ~ ffe d m vn b e t s p o o e t —
k r e-oo it g a ,t ec n e o iin o h b e ta dt e c v ra c ti b td s rh d t e en l l rh so rm c h e t rp st ft eo j c n h o a in e marx t ̄ ec ie h o a
基于粒子滤波的多目标跟踪技术研究

基于粒子滤波的多目标跟踪技术研究在计算机视觉领域,目标跟踪一直是一个挑战性的问题。
由于目标可能会经历形状、大小、颜色等多种变化,同时还会受到光照、背景干扰等因素的影响,因此开发一种有效的目标跟踪算法一直是计算机视觉研究的热点问题之一。
基于粒子滤波的多目标跟踪技术是一种常用的方法之一。
粒子滤波是一种基于蒙特卡罗方法的概率滤波技术。
它将状态估计问题转化为在状态空间中对一些随机样本进行采样来近似表示状态空间中的概率密度函数。
在多目标跟踪任务中,每个目标都是由若干个粒子表示。
根据目标在时间和空间上的演化规律,通过更新粒子状态来实现目标的跟踪。
多目标跟踪问题最重要的问题之一是如何表示目标。
在基于粒子滤波的方法中,每个目标都可以用一个有限的状态向量来表示,例如物体的位置、速度、尺度、方向等信息。
在实际应用中,我们还需要根据目标的特征进行特征提取和特征选择,以便更好地区分不同的目标。
例如,颜色和形状特征可以用于跟踪鸟类,纹理和形状特征可以用于跟踪车辆。
多目标跟踪中一个重要的问题是如何估计状态的后验概率。
在基于粒子滤波的方法中,我们使用一些权重来表征每个粒子的重要性。
这些权重是通过比较每个粒子的测量结果和真实结果之间的相似度来计算的。
然后,我们根据这些权重调整粒子的数目和状态,以便更好地逼近后验概率分布。
多目标跟踪中另一个重要的问题是如何处理目标的动态特性。
我们需要根据目标的动态特性来更新粒子状态。
例如,我们可以使用常用的运动模型来描述目标的运动轨迹,并将其用于状态更新。
在实际应用中,我们还需要考虑目标的非线性运动模式和运动噪声的影响,在状态更新时进行相应的处理。
总体来说,基于粒子滤波的多目标跟踪技术具有以下优点:首先,它可以在跟踪多个目标时保持较好的稳定性。
其次,它具有很好的适应性,可以适用于不同类型的目标跟踪任务。
最后,它的可扩展性很好,可以很容易地扩展到更复杂的目标跟踪任务。
当然,基于粒子滤波的多目标跟踪技术也存在一些挑战。
视觉跟踪
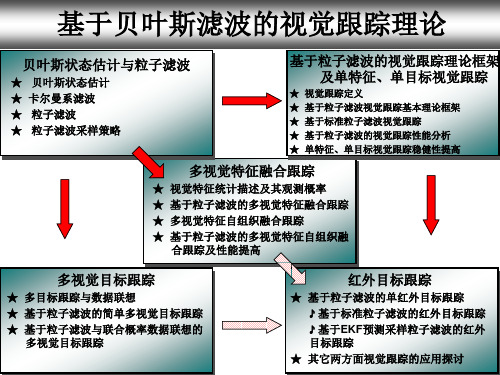
基于标准粒子滤波的视觉跟踪及实验对比
一、动机
标准粒子滤波是经典的粒子滤波算法 单特征、单目标视觉跟踪
说明基于粒子滤波的视觉跟 踪的优越性和前景
二、基于标准粒子滤波的视觉跟踪实现
1.视觉目标状态采样与转移: p X k X k 1 2.采用核(kernel)概率密度估计方法实现颜色特征的统计描述 3.用颜色概率分布直接加权采样粒子
由于退化现象 4. 重采样步骤
二、视觉目标状态转移模型
状态转移模型刻画了视觉目标在两帧之间的运动特性:越精确越有利于视觉跟 踪,但很难建立精确的模型。因此,建立近似状态转移模型: 1.从特定的训练图像序列中学习:很难有普遍适应性 2.选择特定的统计模型:自回归模型
三、建立视觉目标观测概率分布
是实现粒子权值计算的关键 特定视觉特征的统计描述 建立观测概率分布
结论:在复杂场景中,单视觉特征的区分性是动态变化的,很难具有长期 的稳定区分性,采用单视觉特征的视觉跟踪性能会随着视觉特征的区分能力下 降而下降。
视觉目标的视觉特征是冗余的,且一些视觉特征是互补的,也就是说在视 觉目标运动过程中,虽然在某时间段某个视觉特征的区分性下降,但总会有一 个或几个具有较稳定区分能力的视觉特征用于描述视觉目标。因此,在复杂场 景下,多视觉特征融合跟踪是改善视觉跟踪性能的有效途径
2 N i i i i 2 E N k Nwk r Ck N max r i 1 N i 1
那么该粒子滤波算法将在均方误差意义下收敛
五、粒子滤波采样策略
拒绝采样法 重要性采样法:最优重要性建议分布准则(重要权值方差最小)
马尔科夫链-蒙特卡罗采样法 :Metropolis-Hastings(M-H)算法和Gibbs采样
基于特征融合的粒子滤波红外目标跟踪算法

基于特征融合的粒子滤波红外目标跟踪算法刘润邦;朱志宇【摘要】The simplistic of the infrared target observation feature is one of the main reasons that the particle filter tracking algorithm always fails. An infrared target tracking algorithm based on feature fusion for particle filter is proposed in this paper.Considering the limitation of infrared target feature description,We build the characteristic observation model based on the histogram of gray and the histograms of oriented gradients.The particle weights are updated by calculating the Bhattacharyya distance between the candidate template and the target template.In order to improve the accuracy of target tracking, an adaptive dynamic updating strategy is adopted for the target template.The experiments of Matlab simulation confirm that the improved algorithm shows strong accuracy and robustness in infrared target tracking under complex background.%红外目标观测特征单一是粒子滤波跟踪算法易发生跟踪丢失的主要原因.提出一种基于特征融合的粒子滤波红外目标跟踪算法.考虑到红外目标特征描述的局限性,建立基于灰度直方图和梯度方向直方图的特征观测模型,通过计算候选模板和目标模板的巴氏距离来更新粒子权值.为提高目标跟踪的精度,对目标模板采取自适应动态更新策略.Matlab仿真实验验证,改进算法在复杂背景下的红外目标跟踪中表现出较强的准确性和鲁棒性.【期刊名称】《火力与指挥控制》【年(卷),期】2018(043)005【总页数】5页(P39-43)【关键词】粒子滤波;灰度直方图;方向梯度直方图;红外目标【作者】刘润邦;朱志宇【作者单位】江苏科技大学电子信息学院,江苏镇江 212003;江苏科技大学电子信息学院,江苏镇江 212003【正文语种】中文【中图分类】TP3910 引言目标跟踪一直以来都是计算机视觉和数字图像处理的重要组成部分,广泛应用于智能安防、行为识别和军事安全等领域。
基于改进粒子滤波的多传感器融合空间目标跟踪

基于改进粒子滤波的多传感器融合空间目标跟踪薛广月;付俊明;俞能杰;韩治刚【摘要】A multi-sensor fusion method based on an improved particle filter (PF) was presented to estimate the states of space targets for tracking. The improved PF was designed by adopting a fusion estimation based proposal distribution and by using the memetic compact differential evolution (McDE) as re-sampling to generate new particle sets. A theorem was introduced and a simulation were studied to prove the validity of the proposed fusion scheme.%为了跟踪空间目标,构建了基于局部粒子滤波器的多传感器融合方法估计空间目标状态。
粒子滤波重要采样过程中,设计了基于融合估计的重要密度函数减少粒子贫化问题,并设计基于McDE(Memetic compact Differ⁃ential Evolution)重采样策略,通过对粒子的变异与选择等进化操作来解决粒子退化问题。
理论推导与仿真结果皆证明方法的有效性。
【期刊名称】《海军航空工程学院学报》【年(卷),期】2016(031)002【总页数】6页(P127-132)【关键词】粒子滤波;多传感器融合;空间目标跟踪【作者】薛广月;付俊明;俞能杰;韩治刚【作者单位】航天恒星科技有限公司,北京100086;航天恒星科技有限公司,北京100086;航天恒星科技有限公司,北京100086;航天恒星科技有限公司,北京100086【正文语种】中文【中图分类】V249.328空间目标跟踪的根本任务是基于传感器的量测获得目标状态轨迹的估值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章基于粒子滤波的多视觉特征自组织融合的稳健跟踪在视觉跟踪中,视觉特征的选择是非常重要的,常用的视觉特征有:形状[20,40,85]、颜色[35,36,39,55,59,117]、纹理[115]和运动[55]等。
为了评价视觉特征的可用性和适用性,在3.4.1节提出了两个定性的指标,即视觉特征的区分性和稳定性。
在视觉跟踪中,为了获得较好的跟踪性能,都期望能获得区分性和稳健性较好的视觉特征。
然而,对于不同场景,各视觉特征的区分性是不同的,不可能找到一个普遍适用的视觉特征。
特别地,在复杂场景中,各视觉特征的区分性是时变的,是不稳定。
因此,在复杂场景中,单一视觉特征很难取得良好的视觉跟踪性能。
为了提高复杂场景下视觉跟踪稳健性,多视觉特征融合是非常有前景的解决途径,当前已成为视觉跟踪的研究热点[54-56,118,123]。
从信息融合观点来说,在动态的复杂环境中,单传感器信息(或单特征)是不充分的和不稳定的,很难稳健执行特定复杂任务;而多传感器信息(或多特征)融合能利用各信息间的互补性和冗余性,从而显著提高算法的性能。
一般地,对于视觉跟踪问题,视觉特征是冗余的,而且一些视觉特征对场景的动态变化又是互补的。
因此,在复杂场景下多视觉特征融合跟踪能显著提高算法的稳健性。
从信息融合理论出发,Kragic等将投票(Voting)算法[124]和模糊逻辑融合算法[125]应用于多视觉特征融合跟踪,并在机器人视觉伺服控制取得了可靠、稳健的性能[7]。
在动态的复杂场景下,各视觉特征区分性是时变的,自适应融合是非常重要的;而且该自适应融合过程是非指导的,是自组织的。
从多视觉特征自适应、自组织融合角度出发,Triesch等提出了一种多视觉特征自组织融合算法,称为民主合成(Democratic Integration)[126-128],并成功应用于人脸跟踪[126,127]。
由粒子滤波原理和视觉跟踪定义(见定义 3.2)可知,在粒子滤波理论框架下可以很容易地通过观测概率合成实现多视觉特征概率融合跟踪。
Isard等通过重要性采样思想,简单地把颜色特征融合到基于粒子滤波的轮廓跟踪中[60]。
Wu等提出了一种互推理的多特征融合视觉跟踪方法,通过粒子滤波和互推理过程把形状和颜色特征合成实现了在复杂场景下的稳健视觉跟踪[54]。
但是,这两种跟踪方法缺点在于其算法原理仅能实现两个视觉特征的融合,很难推广到多视觉特征的融合跟踪。
Perez 等提出了一种分层采样的多特征融合的视觉跟踪方法,讨论了颜色、运动和声音特征的融合跟踪,并在一些场景中取得了较好的跟踪效果[55]。
但是,该多视觉特征融合跟踪方法的缺点在于:(1)要对处理场景有充分了解,根据足够的先验知识,确定主视觉特征;(2)根据主视觉特征和其他视觉特征间的互补性关系,确定分层采样的顺序,如果分层采样顺序不当,将使得视觉跟踪性能较低;(3)分层采样是串联的处理过程,影响算法效率。
通过对比分析多视觉特征民主合成跟踪算法和粒子滤波融合跟踪算法,Spengler等提出了一种基于粒子滤波的多视觉特征融合跟踪算法,并分析得到基于粒子滤波的多特征融合视觉跟踪算法性能更有优势的结论[56],但该算法只是简单的将各视觉特征的观测概率密度进行了加权合成。
在此,通过对基于粒子滤波的多视觉特征融合跟踪算法的深入讨论和性能分析发现:粒子滤波是处理多视觉特征融合跟踪的有效理论框架;同时,通过对基于民主合成的多视觉特征自组织融合跟踪算法性能的深入分析可知:多视觉特征自组织融合是提高多视觉特征融合跟踪性能的有效方法。
为了充分利用这两种算法优势,在此将民主合成算法机理嵌入到粒子滤波理论框架中,从而形成有效的多视觉特征融合跟踪理论框架,并提出一种基于粒子滤波的多视觉特征自组织融合跟踪算法。
在此基础上,进一步研究多视觉特征自组织融合跟踪的有效性问题,提出一种特征生灭机制,从而提高该多视觉特征自组织融合跟踪的有效性。
本章主要讨论基于粒子滤波的多视觉特征自组织融合的稳健跟踪问题。
首先,讨论了常用视觉特征的统计描述,并分析各视觉特征的适用性和稳定性;然后,在粒子滤波理论框架下讨论多视觉特征融合跟踪问题,并分析基于粒子滤波的多视觉特征融合跟踪的性能;接着,讨论多视觉特征自组织融合跟踪问题,并分析多视觉特征自组织融合跟踪的优势;接下来,深入讨论基于粒子滤波的多视觉特征自组织融合跟踪问题,将多视觉特征自组织融合在基于粒子滤波的视觉跟踪框架下实现,提出一种基于粒子滤波的多视觉特征自组织融合跟踪算法,并在复杂场景下实现该视觉跟踪算法,进而对比分析其算法性能。
最后,讨论该多视觉特征自组织融合跟踪的有效性问题,提出一种特征生灭机制。
4.1 视觉特征统计描述及其观测概率在粒子滤波理论框架下,视觉跟踪的一个基本的问题就是视觉特征的统计描述。
通过建立视觉特征的有效统计描述,在视觉跟踪中实现各视觉特征观测概率计算。
一般地,对于视觉跟踪,视觉特征是冗余的,有很多视觉特征可用于跟踪,常用的有:颜色、形状、纹理和运动等。
对于不同的视觉特征,其统计描述方法也是不同的。
本节主要讨论常用视觉特征的统计描述问题,并通过视觉特征统计描述讨论该视觉特征的观测概率计算方法。
此外,对于不同场景,各视觉特征的区分性是不同的;而且,在动态复杂场景下,各视觉特征的区分性又是时变的,是不稳定的。
因此,针对不同的视觉特征,本节也将简单讨论其区分性和稳定性以及对不同场景的适用性。
4.1.1 颜色特征特性及其统计描述与观测概率计算在视觉跟踪中,颜色特征是基本的视觉特征[35,36,39,55,59,117]。
颜色特征的描述方法很多,常用的是颜色直方图统计法[59],而基于核的统计描述是非常有效的方法[35,36,39,117]。
为了便于讨论单特征、单目标跟踪,在 3.2.2节已详细讨论了基于核的颜色直方图的统计描述及观测概率计算方法,因此本节不再讨论其统计描述和观测概率计算方法。
在计算机视觉中,视觉目标所采用的颜色空间有很多种,图4.1显示了常用的两种颜色空间:RGB颜色空间和HSV颜色空间。
对于不同的场景,颜色空间的区分性和稳定性是不同的[36,129]。
本节将简要讨论颜色空间的选择问题和特定颜色空间的区分性和稳定性问题。
(a) (b)图4.1 颜色空间示意图, (a) RGB颜色空间, (b) HSV颜色空间Fig. 4.1 Color space, (a)RGB color space, (b) HSV color space一般地,RGB颜色空间不太稳定,原因在于:RGB空间各个颜色分量间存在相关性,对光照变化影响较大。
因此,在很多实际应用中颜色直方图往往不采用RGB颜色空间而是采用HSV颜色空间。
HSV颜色空间是由标准的RGB空间中从白色区域沿着立方体的对角线往黑色方向投影得到的(如图4.1(a)所示)。
HSV颜色空间把色度从饱和度、亮度中分解出来,从而对光照变化影响较小。
此外,一些学者还将三维的RGB颜色空间进行组合计算,从而获得较好的颜色表示方法[130]。
特别地,归一化的两维颜色空间可表示为:))/(),/((),(B G R G B G R R g r ++++= (4.1)但是,这种方法对光照仍然较为敏感。
这是由于色饱和度没有被单独分离出来,而色饱和度通常受光照影响很大[129]。
因此,在光照变化强烈的场景中,采用HSV 颜色空间进行视觉目标的颜色核直方图描述更有优势。
对于视觉跟踪,颜色特征是广泛采用的视觉特征,其优势在于:对视觉目标的部分遮挡、旋转和尺度变化都是稳定的[35,36,39,59]。
由3.4.1节对颜色特征的区分性和稳定性研究可知,在视觉跟踪中采用单一的颜色特征存在两个缺点:(1)当视觉目标颜色在场景中没有明显的区分性时,视觉跟踪性能将下降;(2)当场景中出现一些颜色相近的视觉目标时,视觉跟踪将受到较大干扰,甚至引起误跟踪。
因此,在复杂的场景中,采用单一的颜色特征进行视觉跟踪,跟踪性能会受到严重影响。
4.1.2 形状特征特性及其统计描述与观测概率计算在视觉跟踪中,视觉目标的形状特征也是基本的视觉特征[10,20,40,85]。
在计算机视觉研究领域,视觉目标形状的描述方法很多,经典的形状描述方法为活动轮廓模型[58,85,131,132]。
一般地,在活动轮廓模型中使用一些离散控制点来表达视觉目标的轮廓,并通过B-样条拟合获得视觉目标的细节轮廓,而视觉目标轮廓动态变化通过仿射变换控制。
因此,对于特定视觉目标,用活动轮廓模型描述其形状必需两个基本条件:(1)根据视觉目标先验,确定具有完备离散控制点的先验轮廓模型,比如B-样条轮廓模型等;(2)描述视觉目标轮廓动态变化的仿射模型。
于是,在视觉跟踪中可根据活动轮廓模型的思想在仿射形状空间上建立视觉目标的概率轮廓模型,从而实现形状模型的统计描述,并以此计算形状特征的观测概率[20,85]。
在二维图像域上,如果设M 个离散控制点集的视觉目标轮廓为{}1,,M =x x x ,对于控制点m x ,根据仿射变换则有:1112121222m m a a t a a t ⎡⎤⎡⎤'=+⎢⎥⎢⎥⎣⎦⎣⎦x x (4.2) 其中,{}1112212212,,,,,s a a a a t t =X 构成仿射形状空间。
显然地,如果给定特定视觉目标的先验轮廓模型和仿射变换参数,则可完全确定该视觉目标的形状。
图4.2显示了人体头部形状的具有8个离散控制点B-样条轮廓模型描述。
一般地,视觉目标的先验轮廓模型,可通过特定训练图像序列学习获得[132]。
但在视觉跟踪中,为了简化计算复杂度,可根据视觉目标的形状先验选取特定的几何轮廓模型,比如圆、椭圆等二次曲线模型[54,122]。
对于图4.2所示的人体头部形状描述,可选择椭圆轮廓模型。
在基于粒子滤波的视觉跟踪中,视觉目标的形状采样粒子在仿射形状空间sX上抽取[54],并可根据视觉目标的先验轮廓模型获得其轮廓采样粒子的观测Z。
图4.2 人体头部形状的B-样条轮廓模型描述Fig. 4.2 The head shape description by B-spline contour models图4.3 视觉目标形状观测示意图,其中黄色椭圆为视觉目标轮廓采样,黑色曲线为视觉目标的边缘或杂波边缘,椭圆法线上的蓝色圆点为形状的观测点Fig. 4.3 Sket ch of visual object shape observation: the yellow ellipse is a sample of visual object shape;black curves are the edge of the visual object or the clutter;blue dots are the shape observat ion point on the normal of the ellipse 在基于粒子滤波的视觉跟踪理论框架下,视觉目标的轮廓采样粒子的观测概率计算是非常关键的,在此采用Blake和Isard的方法[20,85]计算形状观测概率。