02任务二YL-235A考核装置的认识
235A总体结构介绍

235A总பைடு நூலகம்介绍
235A整机概述
亚龙YL-235A
型光机电一体化实训考核装置 既包含了机电一体化专业所涉及的基础知识、 专业知识和基本的机电技能要求,也体现了 当前先进技术在生产实际中的应用。它为学 生提供了一个典型的、可进行综合训练的工 程环境,为学生构建了一个可充分发挥学生 潜能和创造力的实践平台。在此平台上可实 现知识的实际应用、技能的综合训练和实践 动手能力的客观考核。
YL-235A工作流程
送料机构
1、出料口 2、料盘 3、锁紧螺母 4、延长轴 5、弹簧盖 6、工件 7、弧长 8、直流电机 9、旋转套 10、摩擦片 11、滑动部件
送料机构特点
该料盘结构及组成零件如上图所示,通过调
整螺母的位置,从而可以有效改变弹簧对 滑动部件、摩擦片、旋转套的连接预压力, 达到变旋转套的输出扭矩,使其既能有效驱 动料盘内的工件,又能保证工件对弧片的阻 力过大时,旋转套相对于电机输出轴相对滑 动,使其有效保护电机输出不过载。
机械手搬运机构
1-旋转气缸 2-非标螺丝 3-气动手爪 4-手爪磁性开关Y59BLS 5-提升 气缸 6-磁性开关D-C73 7-节流阀 8-伸缩气缸 9-磁性开关D-Z73 10-左右限位传感器 11-缓冲阀 12-安装支架
机械手搬运机构特点
整个搬运机构能完成四个自由度动作,手臂
伸缩、手臂旋转、手爪上下、手爪松紧。 各个机构均采用双电控电磁阀控制,以增加 机械手工作的稳定性。
物料传送和分拣机构
1-磁性开关D-C73 2-传送分拣机构 3-落料口传感器 4-落料口 5-料槽 6-电感式传感器 7-光纤传感器 8-过滤调压阀 9-节流阀 10-三相异步电机 11-光纤放大器 12-推料气缸
亚龙YL-235A型光机电装备介绍
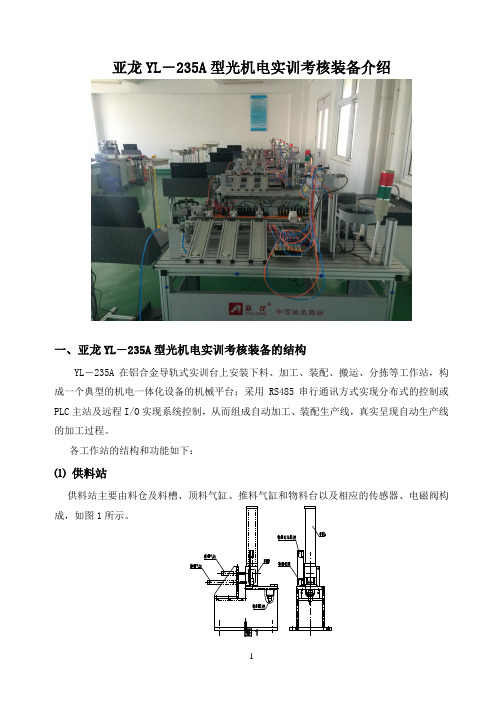
亚龙YL-235A型光机电实训考核装备介绍一、亚龙YL-235A型光机电实训考核装备的结构YL-235A在铝合金导轨式实训台上安装下料、加工、装配、搬运、分拣等工作站,构成一个典型的机电一体化设备的机械平台;采用RS485串行通讯方式实现分布式的控制或PLC主站及远程I/O实现系统控制,从而组成自动加工、装配生产线,真实呈现自动生产线的加工过程。
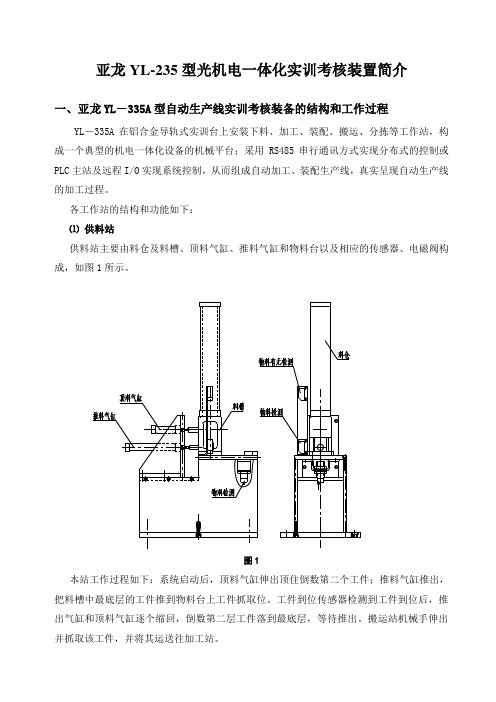
各工作站的结构和功能如下:⑴供料站供料站主要由料仓及料槽、顶料气缸、推料气缸和物料台以及相应的传感器、电磁阀构成,如图1所示。
图1本站工作过程如下:系统启动后,顶料气缸伸出顶住倒数第二个工件;推料气缸推出,把料槽中最底层的工件推到物料台上工件抓取位。
工件到位传感器检测到工件到位后,推出气缸和顶料气缸逐个缩回,倒数第二层工件落到最底层,等待推出。
搬运站机械手伸出并抓取该工件,并将其运送往加工站。
⑵加工站加工站主要由物料台、夹紧机械手、物料台伸出/缩回气缸、加工(冲压)气缸以及相应的传感器、电磁阀构成,如图2所示。
图2本站的功能是完成一个对工件的冲压加工过程,流程如下:搬运站机械手把工件运送到物料台上→物料检测传感器检测到工件→机械手指夹紧工件→物料台回到加工区域冲压气缸的下方→冲压气缸向下伸出冲压工件→完成冲压动作后向上缩回→冲压气缸缩回到位→物料台重新伸出→到位后机械手指松开→搬运站机械手伸出并夹紧工件,将其运送往装配站。
⑶装配站装配站主要有供料单元、旋转送料单元、机械手装配单元、放料台以及相应的传感器、电磁阀构成,如图3所示。
图3本站功能是完成上盖工序,即把黑色或白色两种小圆柱工件嵌入到大工件中的装配过程。
当搬运站的机械手把工件运送到装配站物料台上时,顶料气缸伸出顶住供料单元倒数第二个工件;挡料气缸缩回,使料槽中最底层的小圆柱工件落到旋转供料台上,然后旋转供料单元顺时针旋转180度(右旋),到位后装配机械手按下降气动手爪→抓取小圆柱→手爪提升→手臂伸出→手爪下降→手爪松开的动作顺序,把小园柱工件顺利装入大工件中,机械手装配单元复位的同时,旋转送料单元逆时针旋转180度(左旋)回到原位,搬运站机械手伸出并抓取该工件,并将其运送往物料分解站。
亚龙YL-235型光机电一体化实训考核装置简介
亚龙YL-235型光机电一体化实训考核装置简介一、亚龙YL-335A型自动生产线实训考核装备的结构和工作过程YL-335A在铝合金导轨式实训台上安装下料、加工、装配、搬运、分拣等工作站,构成一个典型的机电一体化设备的机械平台;采用RS485串行通讯方式实现分布式的控制或PLC主站及远程I/O实现系统控制,从而组成自动加工、装配生产线,真实呈现自动生产线的加工过程。
各工作站的结构和功能如下:⑴供料站供料站主要由料仓及料槽、顶料气缸、推料气缸和物料台以及相应的传感器、电磁阀构成,如图1所示。
图1本站工作过程如下:系统启动后,顶料气缸伸出顶住倒数第二个工件;推料气缸推出,把料槽中最底层的工件推到物料台上工件抓取位。
工件到位传感器检测到工件到位后,推出气缸和顶料气缸逐个缩回,倒数第二层工件落到最底层,等待推出。
搬运站机械手伸出并抓取该工件,并将其运送往加工站。
⑵加工站加工站主要由物料台、夹紧机械手、物料台伸出/缩回气缸、加工(冲压)气缸以及相应的传感器、电磁阀构成,如图2所示。
图2本站的功能是完成一个对工件的冲压加工过程,流程如下:搬运站机械手把工件运送到物料台上→物料检测传感器检测到工件→机械手指夹紧工件→物料台回到加工区域冲压气缸的下方→冲压气缸向下伸出冲压工件→完成冲压动作后向上缩回→冲压气缸缩回到位→物料台重新伸出→到位后机械手指松开→搬运站机械手伸出并夹紧工件,将其运送往装配站。
装配站主要有供料单元、旋转送料单元、机械手装配单元、放料台以及相应的传感器、电磁阀构成,如图3所示。
图3本站功能是完成上盖工序,即把黑色或白色两种小圆柱工件嵌入到大工件中的装配过程。
当搬运站的机械手把工件运送到装配站物料台上时,顶料气缸伸出顶住供料单元倒数第二个工件;挡料气缸缩回,使料槽中最底层的小圆柱工件落到旋转供料台上,然后旋转供料单元顺时针旋转180度(右旋),到位后装配机械手按下降气动手爪→抓取小圆柱→手爪提升→手臂伸出→手爪下降→手爪松开的动作顺序,把小园柱工件顺利装入大工件中,机械手装配单元复位的同时,旋转送料单元逆时针旋转180度(左旋)回到原位,搬运站机械手伸出并抓取该工件,并将其运送往物料分解站。
亚龙YL-235A

亚龙YL-235A型光机电一体化实训考核装置一、亚龙YL-235A型光机电一体化实训考核装置简介实训装置由铝合金导轨式实训台、典型的机电一体化设备的机械部件、PLC模块、变频器模块、按钮模块、电源模块、模拟生产设备实训模块、接线端子排和各种传感器等组成。
整体结构采用开放式和拆装式,实训装置用于机械部件组装,可根据现有的机械部件组装生产设备,也可添加机械部件组装其他生产设备,使整个装置能够灵活的按教学或竞赛要求组装具有生产功能的机电一体化设备。
模块采用标准结构和抽屉式模块放置架,互换性强;按具有生产性功能和整合学习功能的原则确定模块内容,使教学或竞赛时可方便的选择需要的模块。
亚龙YL-235A型光机电一体化实训考核装置用于教学,可按工作过程导向,工学结合的模式规划教学活动,完成以下工作任务:1. 气动系统的安装与调试项目:选用该装置配置的单出杆气缸、单出双杆气缸、旋转气缸等气动执行元件和单控电磁换向阀、双控电磁换向阀和磁性开关等气动控制元件,可完成下列气动技术的工作任务:★气动方向控制回路的安装;★气动速度控制回路的安装;★摆动控制回路的安装;★气动顺序控制回路的安装;★气动机械手装置的安装;★气动系统安装与调试;2. 电气控制电路的安装和PLC程序编写项目:选用该装置配置的PLC模块、变频器模块和指令开关、传感器等,可完成下列PLC应用技术工作任务:★电动机正反转控制电路的连接与控制程序编写;★电动机调速控制电路的连接与控制程序编写;★气动方向控制程序编写;★气动顺序动作控制程序编写;★气动机械手控制程序编写;★皮带输送机控制程序编写;★机电一体化设备控制程序编写;★自动生产线控制程序编写。
3. 机电设备安装与调试项目选用该装置配置的机电一体化设备部件、PLC模块、变频器模块和指令开关、传感器等,可完成下列机电设备安装和机电一体化技术的工作任务:★传动装置同轴度的调整;★皮带输送机的安装与调整;★搬运机械手设备安装与调试;★物件分拣设备的安装与调试;★送料设备的安装与调试;★自动生产线设备安装与调试。
亚龙YL-235A光机电一体化1.11

2.系统的组成 (1).机构的组成
该装置主要由实训台、盘式下料机构、气动机械 手搬运机构、传送分拣机构、接线端子排等组成,如 下图所示:
实训台
盘式下料机构
搬运机械手机构
传送分拣机构
接线端子排
(2).电气控制的组成
该装置的电气控制部分主要由电源模块、PLC模块、 变频器模块、触摸屏模块、按钮模块、电磁阀、气缸 以及各种传感器等组成,如下图所示:
直流减速电机
技术参数:
转速 额定电压 空栽电流 负载电流
6圈/min
24V±10 ≤60mA ≤300mA
正常使用: 电机两个接线端子接入直流电压为24V。 电机的正反转的切换取决于直流电的正负极的切换 。
光电传感器
工作原理
漫射式光电接近开关是利用光照射到被测物体上后反射回来的光线而工 作的,由于物体反射的光线为漫射光,故称为漫射式光电接近开关。它的光 发射器与光接收器处于同一侧位置,且为一体化结构。在工作时,光发射器 始终发射检测光,若接近开关前方一定距离内没有物体,则没有光被反射到 接收器,接近开关处于常态而不动作;反之若接近开关的前方一定距离内出 现物体,只要反射回来的光强度足够,则接收器接收到足够的漫射光就会使 接近开关动作而改变输出的状态。
气源处理组件输入气源来自空气压缩机,所提 供的压力为0.6~1.0MPa, 输出压力为0~0.8MPa 可调。输出的压缩空气送到各工作单元。
接近开关
检测距离:2--4mm 体积小,安装方便 动作频率可高达2500HZ 极性保护和过载保护 重复精度式<5%
额定电压DC 10-30V
额定电流DC 200mA
漫射式接近开关的工作原理
送料机构的实际应用
搅拌机
亚龙YL-235A光机电一体化实训

2021/5/27
1
一、认识亚龙YL-235A光机电一 体化实训考核装置
二、设备在教学中的使用
三、解读全国技能竞赛
2021/5/27
2
一、认识亚龙YL-235A光机 电一体化实训考核装置
2021/5/27
3
职
选用设备中不同的部件进行组合,可完成与实际自动生产
业
线相同的生产任务。设备的组装、调试,与职业岗位的工作 任务相同;设备的组装、调试的性能要求和技术要求,与实
(4)具有一定的难度,不仅是已有知识、技能的应用,而且还要 求学生运用已有知识,在一定范围内学习新知识、技能,解决过去从 未遇到过的实际问题。
2021/5/27Biblioteka 202.用于PLC的教学项目
★皮带输送机的前进与后退控制程序编写
用于PLC的LD、LDI、OUT、 AND、ANI、 OR、ORI 、ANB、ORB、 END 等基本指令的教 学与实训。
▲技能竞赛传达教学改革的信息
工作过程导向,工作任务引领等项目教学模 式。
▲试题传达的信息
技能竞赛的试题,对设备的使用、教学功 能的开发。
2021/5/27
30
仅供参考, 谢谢大家!
2021/5/27
31
2021/5/27
32
技能竞赛的题目以“任务书”的形式呈现在参赛者的面前,尤其是对 直接参赛的专业教师来说,是现代职业教育理念转化为实践的努力,对 于拉近实践教学与职业能力的距离有很重要的意义。因此,我想一定会 在职业教育人才培养模式改革中发挥重要的引导作用。
2021/5/27
26
(2)制订工作计划的能力:分析完成工作 任务的程序,分配工作人员,安排每个工
亚龙YL235A型光机电一体化实训考核装置
亚龙YL235A型光机电一体化实训考核装置一、亚龙YL-235A型光机电一体化实训考核装置简介实训装置由铝合金导轨式实训台、典型的机电一体化设备的机械部件、PLC模块、变频器模块、按钮模块、电源模块、模拟生产设备实训模块、接线端子排和各种传感器等组成。
整体结构采纳开放式和拆装式,实训装置用于机械部件组装,可依照现有的机械部件组装生产设备,也可添加机械部件组装其他生产设备,使整个装置能够灵活的按教学或竞赛要求组装具有生产功能的机电一体化设备。
模块采纳标准结构和抽屉式模块放置架,互换性强;按具有生产性功能和整合学习功能的原则确定模块内容,使教学或竞赛时可方便的选择需要的模块。
亚龙YL-235A型光机电一体化实训考核装置用于教学,可按工作过程导向,工学结合的模式规划教学活动,完成以下工作任务:1. 气动系统的安装与调试项目:选用该装置配置的单出杆气缸、单出双杆气缸、旋转气缸等气动执行元件和单控电磁换向阀、双控电磁换向阀和磁性开关等气动操纵元件,可完成下列气动技术的工作任务:★气动方向操纵回路的安装;★气动速度操纵回路的安装;★摆动操纵回路的安装;★气动顺序操纵回路的安装;★气动机械手装置的安装;★气动系统安装与调试;2. 电气操纵电路的安装和PLC程序编写项目:选用该装置配置的PLC模块、变频器模块和指令开关、传感器等,可完成下列PLC应用技术工作任务:★电动机正反转操纵电路的连接与操纵程序编写;★电动机调速操纵电路的连接与操纵程序编写;★气动方向操纵程序编写;★气动顺序动作操纵程序编写;★气动机械手操纵程序编写;★皮带输送机操纵程序编写;★机电一体化设备操纵程序编写;★自动生产线操纵程序编写。
3. 机电设备安装与调试项目选用该装置配置的机电一体化设备部件、PLC模块、变频器模块和指令开关、传感器等,可完成下列机电设备安装和机电一体化技术的工作任务:★传动装置同轴度的调整;★皮带输送机的安装与调整;★搬运机械手设备安装与调试;★物件分拣设备的安装与调试;★送料设备的安装与调试;★自动生产线设备安装与调试。
1、绪论:亚龙YL-235A光机电一体化设备的介绍
4.控制元件
(1)可编程控制器PLC
(2)变频器
采用三菱FX2N-48MR 继电器输出,所有接口采 用安全插连接
三菱E700-0.75KW 控制 电机带动传送带转动,所 有接口采用安全插连接
5.指令开关和指示元件
本实训装置中用到的指令开关有复位按钮、自锁按钮、转 换开关和急停开关,指示元件有警示灯、指示灯和蜂鸣器。
13-16rpm 380v 0.18/0.15A 25W 50/60HZ
Part 03
各个机构的组成
01 送料机构 02 机械手搬运机构 03 物料传送及分拣机构
1.送料机构
转盘 调节支架
物料 出料口物料 检测传感器 物料检测支架
直流电机
放料转盘: 转盘中共放三种物料:金属物料、白色非 金属物料、黑色非金属物料。 驱动电机: 电动机采用24V 直流减速电动机,转速 6r/min;用于驱动放料转盘旋转。 物料支架: 将物料有效定位,并确保每次只上一个物 料。 出料口传感器: 物料检测为光电漫反射型传感器,主 要为PLC提供一个输入信号,如果运行中,光电传感器 没有检测到物料并保持若干秒钟,则应让系统停机然 后报警。
各元件的结构和使用
01
气动执行元件
02
气动控制元件
03
各种传感器
04
控制元件
05
指令开关和指示元件
06
传动元件
1.气动执行元件
气缸、气手指、旋转气缸; 气源处理组件 (油水分离器) 空气压缩机
气 缸 的 分 类
分类 按活塞的形式 按活塞杆的形式 按有无缓冲装置
活塞式
柱塞式
膜片式 单杆 双杆
无缓冲 单侧缓冲 双侧缓冲
机械手搬运机构的实际应用
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Date: 2013-10-16
Page: 2
任务实施
三、GX Developer启动
Date: 2013-10-16
Page: 3
任务实施
三、GX Developer启动
Date: 2013-10-16
Page: 4
任务实施
四、GX Developer的基本操作与使用 1.创建新工程 单击 “工程(F)”,选择“创 建新工程(N)”命令, “PLC系列”选择“FXCPU”; “PLC类型”选择“FX2N(c)”; “程序类型”选择“梯形 图”; 驱动器路径:E:/机电×× 班/××小组。
Page: 1
任务实施
一、GX Developer的安装 安装三菱自动化软件工作平台Environment of MELSOFT,打开 GX Developer的ENVMEL文件夹,双击setup文件开始安装。 安装三菱PLC编程及程序调试软件GX Developer,打开GX Developer文件夹,双击setup文件,即可完成安装工作。 二、计算机与PLC通信的硬件连接 连接RS-232电缆,一头接在计算机的RS232口(串口),另一 头接在PLC的RS422通信口上。选择正确的计算机通信口(COM)即 可实现通信。
Date: 2013-10-16
Page: 7
任务小结
Developer的安装。
计算机与PLC通信的硬件连接。 GX Developer的基本操作与使用。 梯形图程序其他内容的操作。
Date: 2013-10-16
Page: 8
任务二 YL-235A型光机电一体化实训考核装置的认识
任务描述
将三菱的 GX Developer 编程软件装入电脑,用数据线SC09连接计算机与PLC。利用编程软件编写出三相异步电动机正反 转控制的PLC程序,然后将程序下载到PLC里,并进行程序的编辑、 运行、调试及监视。
Date: 2013-10-16
索引:电动机正反转控制
Date: 2013-10-16
Page: 5
任务实施
四、GX Developer的基本操作与使用 2.用GX Developer编写梯形图程序的操作。
工具栏
Dat 任务实施
四、GX Developer的基本操作与使用 3.梯形图程序其他内容的操作 梯形图程序变换 梯形图检查 梯形图程序保存 程序写入PLC 运行监控入PLC