单元及基板的说明
安川机器人同步传送带的操作手册

机器人同步传送带的操作手册1.同步传送带基板单元JANCD-XCP02-2(XRC)/ JANCD-NCP02(NX100)/ JANCD-YCP02(DX100)的安装与设置先把JANCD-XSL01基板安装到JANCD-XCP02单元上/JANCD-NSL01基板安装到JANCD-NCP02单元上;并把此单元安装到CPU基架上。
DX100-ycp022.设定2.机器人同步基板的配置与设置㈠.管理模式,机器人主菜单下[机器人]菜单画面下,选择[传送带文件],弹出以下设置参数画面。
其中:①文件号:传送带特性文件号码如下表所示②使用状态(使用/不使用)设定使用或者不使用传送带特性文件③接口(CN1/CN2/CN3)选择使用已经连接的编码器输入,使用这个接口来启动同步功能的原点输入开关启动机器人同步跟踪功能.★信号XRC中CNPG07这个接口对应CN1,CNPG08对应CN2,CNPG09接口对应CN3★在Nx100机器中NCP02的CN06接口的P1组接线为对应CN1,P2组接线为对应CN2等,参见接线图)编码器与机器人间的配线。
④编码器断线检测(开/关)检测编码器输入线路连接的状态,如果编码器断线则产生1400报警[传输编码器异常],切断机器人伺服电源,机器发生重大故障,要解除机器人故障,先把同步跟踪编码器及线路修复好,才解除故障。
⑤编码器输入类型(编码器/虚拟编码器)指定是外部给机器人同步基板的编码器输入类型是使用实际编码器还是使用虚拟编码器来实现机器人同步跟踪功能控制。
如果选择虚拟脉冲类型编码器,机器人控制系统的同步机能也能执行/实现同步跟踪功能(即便是没有连接输入编码器信号或者传送带没有运行)。
在调试时,选择哪种类型进行跟踪测试.⑥编码器符号(向前/退后)指定从编码器反馈的脉冲位置是传送带向前运转的还是退后运转的方向.当选择“退后”模式时,传送带跟踪位置的等号和数据在传送带监视器画面下的数值数据是有符号.所以,机器人控制器执行连续跟踪在退后运动方向的跟踪模式。
安川机器人通用输入输出信号定义
A15 OUT24+
B16 024VU
A16 024VU
B17 024VU
A17 024VU
B18 +24VU
A18 +24VU
B19 +24VU
A19 +24VU B20 FG
A20
* Փ⫼䚼⬉⑤ᯊˈ䇋ᡞ&1aǃa䏇㒓পᥝDŽ
ֵো IN IN IN IN IN IN IN IN
B10
A10
A10
B11
B11
A11
A11
B12
B12
A12
A12
B13
B13
A13
A13
B14
B14
A14
A14
B15
B15
A15
A15
B16
024VU
A16
024VU
B17
024VU
A17
024VU
B18
+24VU
A18
+ޓ24ޓVޓU ޓޓޓ
B19
+ޓ2ޓ4VޓUޓޓޓ
A20
ッᄤ1R B1 A1 B2 A2 B3 A3 B4 A4 B5 A5 B6
A6 024VU 024VU
B8 A8 B9 A9
B10 A10 B11 A11 B12 A12 B13 A13 B14 A14 B15
A15 024VU 024VU 024VU 024VU +24VU +24VU +24VU +24VU
DX100
13 单元及基板的说明 13.12 机器人通用输入输出信号定义
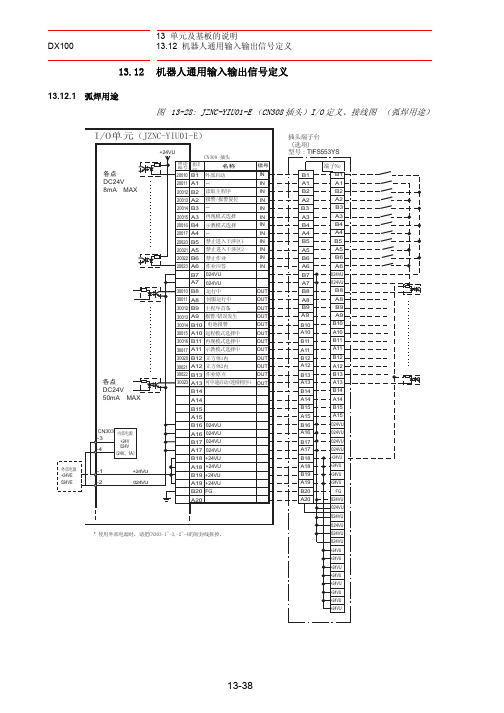
13.12 机器人通用输入输出信号定义
安川机器人通用输入输出信 定义

20036 B6 IN07
20037 A6 IN08
B7 024VU
A7 024VU
30024 B8 ᮁ⇨ ⲥ
30025 A8 ᮁϱ ⲥ
30026 B9 ㉬ϱ ⲥ
30027 A9 ᮁᓻ ⲥ
30030 B10 OUT01 䗮⫼䕧ߎ
30031 A10 OUT02
30032 B11 OUT03
IN
20013 A2 䄺䄺ԡ
IN
20014 B3 㧙
IN
20015 A3 ⦄ݡᓣ䗝ᢽ
IN
20016 B4 冫ᬭᓣ䗝ᢽ
IN
20017 A4 㧙
IN
20020 B5 火ℶ䖯ܹᑆ⍝ऎ
IN
20021 A5 火ℶ䖯ܹᑆ⍝ऎ
IN
20022 B6 火ℶϮ
IN
20023 A6 Ϯᑨㄨ
IN
B7 024VU A7 024VU
A20
ッᄤ1R B1 A1 B2 A2 B3 A3 B4 A4 B5 A5 B6
A6 024VU 024VU
B8 A8 B9 A9
B10 A10 B11 A11 B12 A12 B13 A13 B14 A14 B15
A15 024VU 024VU 024VU 024VU +24VU +24VU +24VU +24VU
A20
ッᄤো B1 A1 B2 A2 B3 A3 B4 A4 B5 A5 B6
A6 024VU 024VU
B8 A8 B9 A9
B10 A10 B11 A11 B12 A12 B13 A13 B14 A14 B15
A15 024VU 024VU 024VU 024VU +24VUޓޓޓޓ +24VU +24VU +24VU
陶瓷基板在电动汽车中的应用_概述及解释说明
陶瓷基板在电动汽车中的应用概述及解释说明1. 引言1.1 概述随着电动汽车的广泛应用和不断发展,对于高性能和可靠的电子组件和系统的需求也日益增长。
而陶瓷基板作为一种优异的材料,因其出色的导热、绝缘和化学稳定性,在电动汽车中得到了广泛应用。
1.2 文章结构本文将首先介绍陶瓷基板的定义和特点,然后探讨电动汽车中常见的电子组件和系统。
随后,将通过具体案例来说明陶瓷基板在电动汽车中的应用领域。
接下来,我们将重点讨论陶瓷基板在电动汽车中的优势和挑战,包括其在导热性能、机械强度以及生产成本方面所带来的优势,并分析制约其应用的技术挑战。
最后,我们还将探讨陶瓷基板对可持续发展所带来的影响,并展望未来趋势和发展方向。
1.3 目的本文旨在全面概述陶瓷基板在电动汽车中的应用情况,并解释说明其优势和挑战。
通过深入分析,我们将探讨陶瓷基板对电动汽车可持续发展的影响,并对未来的趋势和发展方向进行讨论。
最终目的是为读者提供关于陶瓷基板在电动汽车领域中的全面认识,并促进该领域的进一步研究和应用。
2. 陶瓷基板在电动汽车中的应用:2.1 陶瓷基板的定义与特点:陶瓷基板是一种多层结构的电子元件,由具有良好导电和绝缘性能的陶瓷材料制成。
它通常由多个通过薄膜技术隔离的金属线路和组件组成,以支持和连接各种电子器件。
与传统的有机基板相比,陶瓷基板具有较低的热膨胀系数、较高的耐高温性能和优异的尺寸稳定性。
2.2 电动汽车中的电子组件和系统:在现代电动汽车中,大量复杂的电子组件和系统被广泛应用。
这些包括功率模块、控制单元、驱动器、传感器等。
其中,功率模块负责控制并转换电池提供的直流能源为适合驱动马达所需的交流能源;控制单元则监测整个电动汽车系统,并协调不同部分之间的交互;驱动器则将电能转化为力以推动车辆前进;传感器负责采集各种环境数据以及车辆状态信息。
2.3 陶瓷基板在电动汽车中的应用案例:在电动汽车中,陶瓷基板被广泛应用于上述提到的各种电子组件和系统中。
陶瓷基板使用注意事项

基板使用时的注意事项说明一、陶瓷基板的特点基板材料:硬度高、强度高,绝缘性好,但是韧性较差,当急冷急热时易出现由于热应力造成的裂纹。
同一般脆性材料类似,陶瓷基板对于压应力的承受能力远远大于其承受拉应力的能力。
因此,生产中避免对陶瓷基板施加拉应力是防止基板碎裂的一个重要方面。
切割加工难度大,因此一般采用圆刀或者激光进行加工。
目前的陶瓷基板加工一般采用激光加工较多,激光加工时切孔时可采用脉冲激光或者连续激光,而划线时一般采用脉冲激光,以减少激光局部加热对陶瓷基板的热冲击。
而由于划线是在陶瓷表面通过激光烧灼出连续密集排列的点状凹坑而形成线条,以方便封装后分成独立的小单元。
基板使用时的注意事项说明二、陶瓷基板特点电路材料:采用银浆烧结而成,银浆一般组成为银粉、玻璃粉及有机溶剂,其中银粉含量约80%以上,玻璃粉含量一般不超过2%,其余为有机溶剂。
银浆通过丝网印刷工艺在陶瓷基板表面形成电路,通过烧结排出银浆中的有机成分,同时玻璃及银粉软化,将银粘接在陶瓷板上形成电路。
由于基板在加工过程中经过850~900摄氏度的高温进行烧结,其中的有机成分在烧结过程中全部分解,所形成的的电路上只留有无法分解排出的银单质及少量玻璃,其中玻璃主要起到将银粘接在陶瓷基板上的目的。
银单质稳定性较差,极易受到空气中S元素等与银容易发生反应的元素的影响而变色。
基板使用时的注意事项说明三、陶瓷基板使用的注意事项1、焊线:在进行焊线时一般需要进行加热,而陶瓷基板由于已经经过激光划线、切割,基板上已经存在缺陷,因此在受到热冲击时,基板上的划线、切割等地方就成为薄弱点,当热应力大于基板薄弱点的强度时,就会出现基板的破损现象。
应对措施:在基板进行焊线的过程中,需要对基板进行预热,使其从室温到进行焊线加工的过程中,温度得到较为均匀的升高,避免由于温差过大形成较大的热应力。
一般根据焊线的实际温度、环境公益及焊线工艺条件确定陶瓷基板温度的升温条件,通过测量基板在不同阶段的表面温度,确定相应的公艺参数。
DX200接线图

14.13.2 搬运用途图14-42: JANCD-YIO21-E(CN308插头)I/O分配、接线图(搬运用途)14 单元及基板的说明14.13 机器人通用输出输入信号分配图14-43: JANCD-YIO21-E(CN309插头)I/O分配、接线图(搬运用途)14 单元及基板的说明14.13 机器人通用输出输入信号分配图14-44: JANCD-YIO21-E(CN306插头)I/O分配、接线图 (搬运用途)14 单元及基板的说明14.13 机器人通用输出输入信号分配图14-45: JANCD-YIO21-E(CN307插头)I/O分配、接线图(搬运用途)14 单元及基板的说明14.13 机器人通用输出输入信号分配表 14-4: 专用输入一览表(搬运用途)逻辑编号输入名称/功能20010外部启动与示教编程器的[START]功能相同。
只有在启动时有效,机器人开始运行(再现)。
但是,外部启动被禁止时无效。
该项在再现条件画面中进行设定。
20012主程序调出该信号只有在启动时有效,机器人程序的首项,即作为主程序(1)的首项将被调出。
但在再现、示教锁定中、正在演示的主程序无法调出。
调用禁止(通过操作条件画面设定)时无效。
20013报警/错误复位报警、错误发生时(排出主要原因后),开启此信号,将解除报警、错误的状态。
20015再现模式的选择在示教编程器模式键指向[REMOTE]时,选择再现模式。
该信号只有在启动时有效。
和其他模式选择信号同时被指定时,优先选择示教模式。
在指定条件画面的“外部模式切换”禁止时,该信号无效。
20016示教模式的选择在示教编程器模式键指向[REMOTE]时,选择再现模式。
该信号开启时,其他模式选择无效。
另外,即使其他模式选择信号开启,也优先选择该信号,进入示教模式。
20020禁止进入干渉区1将要进入立方体12)区域时,若此时信号开启,机器人将停下,并进入待机状态(伺服接通)。
待机时,关闭该信号后,机器人将重新开始作业。
焊装夹具设计技术规范
6.4.5 手动夹紧,气动打开的标准机构:
EC—J 02 001—2008
12
每天进步一点点
PDF 文件使用 "pdfFactory Pro" 试用版本创建
6.4.6 手动夹紧,气动打开机构气动原理图的构成:
EC—J 02 001—2008
1.此种类型气缸下部进气口处安装消声器;
2500≥A+B≥1800 采用 12#槽钢 (超大型) 基板厚度 C=25
A+B≥2500
采用 20#槽钢 (超大型) 基板厚度 C=30
注:A 或 B≥1400 时采用中间加强筋,且间距不大于 700mm。周边槽钢设计开口向外;
6.3.3 精度 l 基准面平面度0.1/1000; l 基准槽公差±0.05mm; l 栅格线位置相对基准的误差:0.15/1000; l 基准面粗糙度Ra1.6。
1.目的
EC—J 02 001—2008
为在夹具设计制造过程中,提供设计依据及验收标准;在与夹具厂家进行技术交流以
本标准作为依据。
2.范围
本标准规定了夹具设计制造过程中设计规则和部分标准件的适用范围。
本标准适用于长城汽车股份有限公司的夹具设计制造及夹具验收和招标技术文件依
据。
3.规范性引用文件
下列文件中的条款通过本标准的引用而成为本标准的条款,本标准等效采用以下标
准,所示标准均为有效版本,所有标准均会被修订,如有修订将及时变更。
GB/T1804-1992 一般公差、线性尺寸的未注公差;
GB/T1800.4-1999 孔与轴的极限偏差数值;
GB/T4458.4-1984 尺寸标注;
GB/T4458.5-1984 尺寸公差与配合的标注;
DX100维护要领书

DX100维护要领书请务必确保本使用说明书到达本产品的最终使用者手中。
MOTOMAN 使用说明书一览MOTOMAN-□□□使用说明书DX100 使用说明书DX100 操作要领书DX100 维护要领书「DX100操作要领书」根据用途不同内容有异,请一定确认与用途是否相同.SG-MOTOMAN资料编号:R-CTO-A108DX100iiDX100安全注意事项使用前(安装,运转,保养,检修),请务必熟读并全部掌握本说明书和其他附属资料,在熟知全部设备知识,安全知识及注意事项后再开始使用。
本说明书中的安全注意事项分为“危险”,“注意”,“强制”,“禁止”四类分别记载。
另外,即使是 “注意”所记载的内容,也会因情况不同而产生严重后果,因此任何一条注意事项都极为重要,请务必严格遵守。
iiiDX100ivDX100v本书常用词汇定义“MOTOMAN”是安川电机工业机器人的商品名。
MOTOMAN 由机器人本体“机器人”,机器人控制柜,示教编程器和“供电电缆”构成。
在本书中,这些部分如下表表示。
机器人各部分 本书的表示DX100控制柜DX100DX100 示教编程器示教编程器机器人与控制柜之间的电缆供电电缆DX100另外,示教编程器的键,按钮,画面的表示方法如下所示:操作步骤的表达方式的定义操作步骤的说明中, "选择 …… "表示的操作方法,是把光标移到选择对象上,再按[选择]键,或者直接在触摸屏上触摸选择。
viDX100警示牌的说明下列警示牌牌贴在机器人及 DX100上。
要完全遵照警示牌执行。
vii1 DX100的设备配置DX100 1.1 单元及基板的配置1DX100的设备配置DX100是由单独的部件和功能模块(多种基板)所组成。
出现故障后的原件通常可以很容易地用部件或模块进行更换。
关于DX100设备配置的说明如下:1.1单元及基板的配置1.1.1配置机型的构成可分为:小型机型、中型机型、大型机型三类。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
DX100
13 单元及基板的说明 13.4 CPS 单元 (JZNC-YPS01-E)
13.4 CPS 单元 (JZNC-YPS01-E)
此 CPS 单元 (JZNC-YPS01-E)是提供控制用的 (系统、I/O、控制器)的 DC 电源 (DC5V、DC24V)。 另外还备有控制单元的 ON/OFF 的输入。
TMEDN-630809-MA (nichifu)
ᴀ䕈ࠊᵓ 54&#'#:#
%0
8
5*1%-
图 13-3:
防碰撞传感器的连接
6/'&0(#㧔PKEJKHW㧕 5*1%-
կ⬉⬉㓚˄ֵো˅
ེੱ
6/'&0/#㧔PKEJKHK㧕 6/'&0(#㧔PKEJKHW㧕
DX100
13 单元及基板的说明 2 次连接信号连接时的注意事项
注意
• 对于 2 次专业连接,请同时连接 ON/OFF 开关 (接点)
• 2 个信号的 ON/FF 时间不一致时,就发生报警。
&:
ϧ⫼䕧ܹ
ᓔ݇
8
䕧ֵܹো
䕧ߎֵো
8
ৠᯊ21
注意
⺄ᩲӴᛳ఼ ˄䗝乍˅
5*1%- 6/'&0/#㧔PKEJKHW㧕
⺄ᩲӴᛳ఼ֵো⬉㓚
13.2.2.2 用机器人内部电缆连接防碰撞传感器时
1. 在基本轴控制基板 EAXA-CN512 (动力插头)里,用端子销子把短 路连接的 【SHOCK-】和 {SHOCK+】销子拆开。
2. 把分开的 SHOCK(+) 插头和机器人机内的防碰撞传感器信号线的 SHOCK(+) 连接。
%0 Ⳉ䕧ܹᦦ༈
%0 ,2䗮ֵᦦ༈
%0 ,2䗮ֵᦦ༈
%0 ࠊ䗮ֵᦦ༈
%0 ࠊ䗮ֵᦦ༈
%0 ᭈ⌕఼ࠊֵোᦦ༈
%0 #/229/ֵোᦦ༈
%0 #/229/ֵোᦦ༈
%0 #/229/ֵোᦦ༈
%0 #/229/ֵোᦦ༈
#8
(7
(7 $&ैދ亢⫼ⱘֱ䰽ϱ )2
#8
%0 $&ैދ亢ᦦ༈
%0%0%0 $&ࠊ⬉⑤ᦦ༈
图 13-1: 电源接通单元的构成 (JZRCR-YPU01- □)
%0 Џ⬉⑤䕧ܹᦦ༈
%0
%0
8 8
%0
8
%0
#%+0
+0276 8#% *\ ##
%0
4'/16'
&38䖲ⱘᦦ༈
%0 &38䖲ջᦦ༈
%0
%0%0 9ऩܗ䕧ߎᦦ༈
%0%0
%0 #/229/ֵোᦦ༈
%0 #/229/ֵোᦦ༈
13.2.2 防碰撞传感器的连接方法
13.2.2.1 直接连接防碰撞传感器的信号线时 1. 在基本轴控制基板 EAXA-CN512 (动力插头)里,用端子销子把短 路连接的 【SHOCK-】和 {SHOCK+】销子拆开。
2. 首先把拆下来的端子销 【SHOCK-】和 【SHOCK】分别和碰撞传感器 的信号线连接。
(使用机器人内部电缆连接防碰撞传感器时)
ེੱ
5*1%- 6/'&0(#㧔PKEJKHW㧕
5*1%-
5*1%- 6/'&0(#㧔PKEJKHW㧕
⺄ᩲӴᛳ఼ 㧔䗝乍˅
5*1%- 6/'&0/#㧔PKEJKHW㧕կ⬉⬉㓚㧔2)㧕
䇋䖲䏇㒓
ण ޓ䇗 ޓҢ ޓ ࡼޓջ ޓޓޓޓ ޓޓ
ᴀ䕈ࠊᵓ 㧔54&#'#:#&㧕
%0
8 $
$
#:&+0
$
$
#:&+0
#
#
#:&+0
$
$
#:&+0
#
#
#:&+0
$
$
#:&+0
#
#
#:+0%1/ #
#
8 #
电源接通单元经过线路滤波器对控制电源供给电源 (单相交流 200 至 220V)。
电源接通单元的形式
形式 JZRCR-YPU01- □
对应机种
MH5L、MH6、MA1400、VA1400、MA1900、HP20D、 HP20D-6、MH50、MS80、VS50、ES165D、ES200D
(7
(7 $&ࠊ⬉⑤⫼ⱘֱ䰽ϱ 2
#
䇋䖲䏇㒓
䗖ড়ⱘᦦ༈
,(#,♽ ,&(8-:.㧦,56 ធὐ㧦5,()(2
#9)㨪
ǂⱘ䚼ߚ᳝ᄬण䇗Ңࡼջᴀ䕈ࠊᵓᯊˈ䇋䖲DŽ 㧔54&#'#:#غ㧕
13-7
DX100
13 单元及基板的说明 13.3 CPU 单元的构成
重要
因为防碰撞传感器是选项,标准配置机器人的机内防碰撞传 感器电缆没有连接防碰撞传感器。
机器人的机内防碰撞传感器电缆的配线,请参照使用的机器 人使用说明书中的配线图。
图 13-4: 防碰撞传感器的连接
13-5
DX100
ᴀ䕈ࠊᵓ 54&#'#:#
8
%0
13 单元及基板的说明 13.2 基本轴控制基板 (SRDA-EAXA01 □)
• 相同接点,请不要连接 2 个信号。 (请准备 2 个独立的接点)
• 每个信号的电源是相反的,如果接到同一个点的话,电源会出现短 路,有可能到时 DX100 单元故障。
&:
ϧ⫼䕧ܹ
8
䕧ֵܹো
䕧ߎֵো
8
!! ⋧หធὐ
ⷁ䏃⬉⌕
13-2
DX100
/#&'+0,#2#0
#$%&'()* ,./ 0 23 4 5 67 8
%0
8 8
%0
• 控制器电源控制回路 • 防碰撞传感器 (SHOCK)输入回路 • 直接输入回路
图 13-2: 基本轴控制基板 (SRDA-EAXA01 □ )
%0 5*1%-ֵো䕧ܹᦦ༈
%0 ࠊ⬉⑤䕧ֵܹো
%0 㓪ⷕ఼ֵোᦦ༈
%0 ᢅ䯌ࠊֵোᦦ༈
%0 ᅝܼऩܗ,)ᦦ༈ǂ
(7
(7
(7
#
%0
%0
(7 #
%0
%0
%0
(7
(7
%0
(7#
58/: 58/:
(7#
%0
0%/
58/: 58/:
%0
%0
%0 %0 %0
%0 %0 %0
58/: 58/:
13.3.2.2 机器人 I/F 单元 (JZNC-YIF01- □ E) 机器人 I/F 单元 (JZNC-YIF01- □ E) 是对机器人系统的整体进行控制,控 制基板 (JANCD-YCP01)是用背板的 PCI 母线 I/F 连接、基本轴控制基板 (SRDA-EAXA01A □ ) 是用高速并行通讯连接的。
$ # #
8 #
䗖ড়ⱘᦦ༈
$ $ # $ # $ # # #
,(#,♽ ,&(8-:.㧦,56 ᦦ༈㧦5,()(2
#9)㨪
Ⳉ䕧ܹ˄Ԏ᳡˅ Ⳉ䕧ܹ˄Ԏ᳡˅ Ⳉ䕧ܹ˄Ԏ᳡˅ Ⳉ䕧ܹ˄Ԏ᳡˅ Ⳉ䕧ܹ˄Ԏ᳡˅ Ⳉ䕧ܹ˄Ԏ᳡˅
图 13-5: 直接输入 (伺服)1-5 的连接
13-6
DX100
13 单元及基板的说明 13.2 基本轴控制基板 (SRDA-EAXA01 □)
ᴀ䕈ࠊᵓ
54&#'#:# غ
#:&+0
%0 8 $
$
#:&+0
#
#:&+0
$
#:&+0
#
#:&+0 #:&+0 #:+0%1/
DC + 5V DC + 24V (24V1:系统用、24V2⫼
&1 /$1⫼
%0
%0
%0
&1 ϧ⫼ষ 56&
⬉∴
13.3.2 CPU 单元内的单元基板 13.3.2.1 控制基板 (JANCD-YCP01)
此基板 (JANCD-YCP01)用于控制整个系统、示教编程器上的屏幕显示, 操作键的管理、操作控制、插补运算等。 它具有 RS-232C 串行接口、和 LAN 接口 (100BASE-TX/10BASE-T)。
13 单元及基板的说明 13.1 电源接通单元
13.1 电源接通单元
电源接通单元是由电源接通顺序基板 (JANCD-NTU)和伺服电源接触器 (1KM, 2KM) 以及线路滤波器 (1Z) 组成。电源接通单元根据来自电源接通 顺序基板的伺服电源控制信号的状态,打开或关闭伺服电源接触器,供给 伺服单元电源 (三相交流 200 至 220 V)。
8 8⬉⑤䕧ߎᦦ༈
%0 8⬉⑤䕧ߎᦦ༈
%0 䖰ࠊᦦ༈
项目 交流输入
输出电压 监视器显示
规格
额定输入电压:AC200/220V 电压变更范围:+ 10% ~- 15% (AC170 ~ 242V) 频率 :50/60Hz ± 2Hz (48 ~ 62Hz)
Ӵᛳ఼ᵓ ϧ⫼3&,ᦦῑ;
ᴎ఼Ҏ,)ᵓ -$1&'<,)ষ(