使用软件MissionPlanner对飞控进行配置的过程
pix飞控校准流程

pix飞控校准流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!1. 安装和连接硬件将 Pix 飞控安装在飞行器上,并确保连接正确。
(完整版)missionplanner所有飞行模式中文参数调参必备

0
0:禁用 1:启用
启用姿态锁定,当摇杆松开后姿态不变
ACRO_PITCH_RATE
180
角度/秒
10 500
特技模式下满舵的最大俯仰角速度
ACRO_ROLL_RATE
180
角度/秒
10 500
特技模式下满舵的最大横滚角速度
ADSB_BEHAVIOR
0
ADSB_ENABLE
0
AFS_QNH_PRESSURE
0
毫米汞柱
这个参数设置以毫米汞柱计的在高度限制中使用的QNH压强. 0值将禁用高度限制.
AFS_RC
1
AFS_RC_FAIL_TIME
0
AFS_RC_MAN_ONLY
1
AFS_TERM_ACTION
0
此选项可用来强制执行一个在飞行终止后的动作. 通常这是由外部的失效保护板执行的, 但在这你可以软件设置APM来做这件事. 若设为0(默认) 则没有额外操作. 若设为“魔数”42 则飞机会在所有舵面执行最大打舵以及0油门,来故意让自己坠机.
AFS_MAN_PIual)下输出高电平的数字IO口
AFS_MAX_COM_LOSS
0
如果通讯失联事件累计超过这个值,则飞机将停止在通讯恢复后再度回到任务. 设为零来允许任意数目的通讯失联事件.
AFS_MAX_GPS_LOSS
0
如果GPS丢失事件累计超过这个值,则飞机将停止在GPS信号恢复后再度回到任务. 设为零来允许任意数目的GPS丢失事件.
0
这个选项启用高级失效保护系统. 若设为0(禁用)所有高级失效保护功能无效
AFS_GEOFENCE
1
AFS_HB_PIN
2多旋翼无人机飞控调试技术_加载参数

二、加载参数
2.1、连接飞控到地面站软件
◆在PC设备管理器中查看当前飞控(PX4 FMU)使用的端口。
图示中是
COM3,不同PC可能有差异,需要自己查看。
图 2.1 设备管理器中查看端口
◆ Mission Planner中选择相应的端口,选择波特率为115200,然后点击“连接”。
图 2.2 端口设置和软件连接
2.2、加载参数
◆点开地面站软件的“配置/调试”菜单下的“全部参数表”。
图 2.3 全部参数表界面
◆点击右边的“加载”。
图 2.4 加载参数菜单
◆通过弹出的对话框,找到并打开“E360参数.param”文件。
图 2.5 默认参数
◆如果弹出提示,点击“OK”。
点击“Yes”
点击“Yes”
◆然后点击右边的“写入参数”。
图 2.6 写入参数菜单。
Mission Planner地面站操作手册
Mission Planner地面站作业手册目录第一章地面站基本界面 (3)一、基础界面、仪表盘、动作指令 (3)第二章航线规划器与指令 (4)一、建立航点与指令 (4)第三章多边形测绘航线规划设置 (5)一、多边形航线 (5)1.添加多边形点 (5)2.绘制航线多边形区域 (6)3.创建自动航线组 (6)4.设置基本航线参数 (7)5.设置航线网格 (7)6.设置相机参数 (8)第四章航线飞行模拟校验 (9)1. 飞行仿真模式 (9)2. 仿真校验测试 (9)第五章Pos数据与照片匹配 (10)一、飞控日志、相机照片、遥测数据导出 (10)1. 飞控日志导出 (10)2. 相机照片导出 (10)3. 遥测数据导出 (11)4. Pos数据匹配 (11)第六章相机调参设置 (13)二、相机参数设置 (13)三、相机接入初始设置 (14)加一章飞控参数写入失控返航等等调试第一章地面站基本界面一、基础界面、仪表盘、动作指令基础界面仪表盘动作指令第二章航线规划器与指令一、建立航点与指令第三章多边形测绘航线规划设置一、多边形航线1.添加多边形点多边形航线主要用于航测航线规划飞行航线的规划首先需要绘制一个多边形框选指定的作业区域2.绘制航线多边形区域在地图中规划好需要拍摄的大概区域3.创建自动航线组右键点击地图选择自动航点工具S-urvey(Grid)来创建飞行航线组4.设置基本航线参数基础设置中建议所有选项都选中,飞行速度、海拔高度、航线角度根据任务需求来设置5.设置航线网格拍摄正射影像这一处设置的选项建议不选中,航向旁向重叠率的设置至关重要,根据任务需求设置好。
而缓冲点的距离可以根据仿真测试来制定最佳的缓冲距离,达到进入拍照区域是稳定的直线航线。
航线起飞方向则根据规划的起降点选择好适当的起降地点与方向决定。
6.设置相机参数设置并校验相机参数,或加载照片样本。
设置好所有参数后保存航线并写入航线。
第四章航线飞行模拟校验1.飞行仿真模式Mission Planner自带有仿真功能,可以进行离线测试航线如果是任务前预规划,可以事先模拟飞行一次以便校验飞行参数与拍照点位是否正确。
使用FlightGear在MissionPlanner中对APM进行半实物仿真

使用FlightGear在MissionPlanner中对APM进行半实物仿真2014/10/10张兆龙一,半实物仿真介绍本次半实物仿真用到的文件都在“HIL_APM”文件夹中。
1.下载FlightGear软件和MissionPlanner软件。
经实践验证FlightGear2.6版本和MissionPlanner1.3.10版本搭配可以进行本次半实物仿真,FlightGear3.0版本和MissionPlanner1.3.10版本搭配不可以进行本次半实物仿真。
2.先安装FlightGear软件,32位操作系统安装在C盘“Program Files”文件夹中,64位操作系统安装在C盘Program Files(x86)文件夹中。
3.再安装MissionPlanner,32位操作系统安装在C盘“Program Files”文件夹中,64位操作系统安装在C盘Program Files(x86)文件夹中。
4.以32位操作系统为例,拷贝”system.fgfsrc”到C:\Program Files\FlightGear\data(64位操作系统拷贝到C:\Program Files(x86)\FlightGear\data)文件夹中,拷贝MA VLink.xml文件到C:\Program Files\FlightGear\data\Protocol文件夹中(64位操作系统拷贝到C:\Program Files(x86)\FlightGear\data\Protocol)。
再拷贝“Rascal”文件夹到C:\Program Files\FlightGear\data\Aircraft文件夹中(64位操作系统拷贝到C:\Program Files(x86)\FlightGear\data\Aircraft)。
5.如果是64位操作系统,还要拷贝C:\Program Files(x86)\FlightGear中的“data”文件夹到C:\Program Files\FlightGear\bin\Win64文件夹中。
Pixhawk飞控设置飞行模式教程及LED灯意义
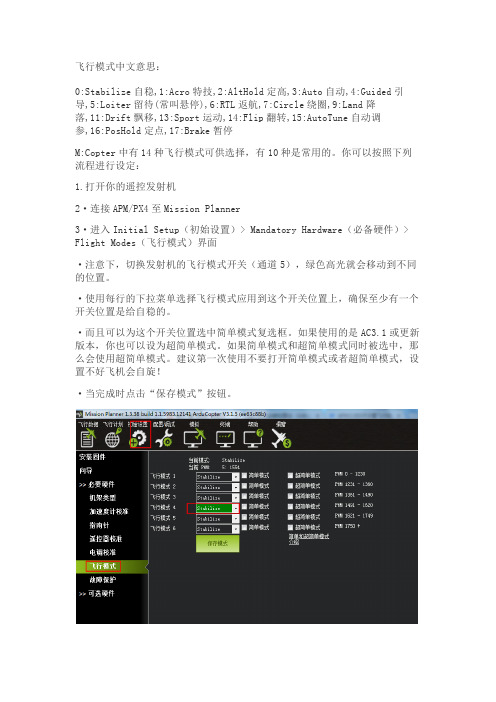
飞行模式中文意思:0:Stabilize自稳,1:Acro特技,2:AltHold定高,3:Auto自动,4:Guided引导,5:Loiter留待(常叫悬停),6:RTL返航,7:Circle绕圈,9:Land降落,11:Drift飘移,13:Sport运动,14:Flip翻转,15:AutoTune自动调参,16:PosHold定点,17:Brake暂停M:Copter中有14种飞行模式可供选择,有10种是常用的。
你可以按照下列流程进行设定:1.打开你的遥控发射机2·连接APM/PX4至Mission Planner3·进入Initial Setup(初始设置)> Mandatory Hardware(必备硬件)> Flight Modes(飞行模式)界面·注意下,切换发射机的飞行模式开关(通道5),绿色高光就会移动到不同的位置。
·使用每行的下拉菜单选择飞行模式应用到这个开关位置上,确保至少有一个开关位置是给自稳的。
·而且可以为这个开关位置选中简单模式复选框。
如果使用的是AC3.1或更新版本,你也可以设为超简单模式。
如果简单模式和超简单模式同时被选中,那么会使用超简单模式。
建议第一次使用不要打开简单模式或者超简单模式,设置不好飞机会自旋!·当完成时点击“保存模式”按钮。
飞行模式注解1、稳定模式Stabilize稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式。
此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最佳模式。
一定要确保遥控器上的开关能很方便无误地拨到该模式,应急时会非常重要。
2、比率控制模式Acro这个是非稳定模式,这时apm将完全依托遥控器遥控的控制,新手慎用。
3、定高模式ALT_HOLD定高模式(AltHold)是使用自动油门,试图保持目前的高度的稳定模式。
APM自动调参步骤

APM飞控自动调参操作步骤:1). 设置一个定高档位(althold)。
在mission planner, Config/tuning里面APM : copter PIDS 选项卡中将ch7或者ch8 设置为自动调参(autotune)。
2). 将apm所设置的input通道,连接到遥控器的一个2档开关。
将遥控器对应的2档开关打到关档(low)。
3). 一定要找一个无风的天气或者风很小的天气出去自动调参,到一个尽可能大的空旷场地。
如果有条件可以在体育馆里。
4). 自稳模式解锁起飞,将飞行模式切换到定高。
尽量不要飞太高,高处空气流动速度会快,如果万一摔机,低空可以减小损失,尽量在草地上测试自动调参(后面会讲怎样防止自动调参坠机)。
5). 将设置的ch7 或者ch8 对应遥控器2当开关打到开档(high)以启动自动调参:首先飞机会先向左倾斜20度,再向右20度,左右来回几分钟。
横滚调好之后会开始做俯仰调参,前后晃。
6). 可以随时用遥控器控制飞机前后左右上下位置以免碰撞到障碍物,在手动调节飞机位置的时候使用的是原始的PID值,松开杆后飞机会继续从刚才移动前的那个点继续调。
也可以随时将自动调参开关置低来放弃调参过程。
遥控器的4个摇杆方向微调全要置0,这样才可以模拟摇杆回中。
7). 自动调参结束飞机会自动恢复调参之前的PID。
8). 此时将调参开关打低、再打高飞机就以调参之后的PID飞行,如果觉得满意直接让调参开关在高档位,降落加锁,这样就保存了新的PID。
9). 或者将调参开关打低,降落加锁,这样就不保存数据。
注意:以下第一条是自动调参炸鸡官方解释的主要原因,autotune的bug 在去年12月就已经修干净了,现在就是电调不同步导致炸鸡了。
1. 自动调参会对生成频率很高的PWM脉冲方波给电调(让飞机迅速左右前后摇晃以感应参数),在PWM脉冲变化速度快的情况下,盘式电机或者低于500KV的电机就会容易堵转。
使用软件MissionPlanner对飞控进行配置的过程

1、打开Mission Planner软件,进入初始设置选项选择串口为COM4 PX4 FMU(COM4),波特率设置为115200 2、选择安装固件-》加载自定义固件会弹出一个文件选择对话框,来选择自定义文件3、点击自定义文件,选择“打开”选项,选中该文件,选中的文件开始被下载到开发板上。
4、下载完成后,会显示提示,要求在飞控板上的音乐停止之后,再点击“OK”按钮5、等音乐停止之后,点击“OK”按钮之后,就可以完成飞控板的软件下载操作。
会显示提示“Upload Done”,即下载完成。
6.此时点击右上角的“连接”图标,就可以连接到飞控板上,对飞控板的参数进行调试。
此时,界面出现一个新增的“必要硬件”选项,点击该选项,会发现该选项下面包含“机架类型”、“加速度计校准”、“罗盘”、“遥控器校准”、“飞行模式”、“故障保护”六个选项,“机架类型”、“飞行模式”、“故障保护”三个选项可以选择自定义模式,“加速度计校准”、“罗盘”、“遥控器校准”三个选项则需要自己进行校准。
7、“机架类型”选项可以选择默认8.1、“加速度计校准”需要自己校准,点击“校准加速度计”进入校准, 8.2、在将飞控板水平放置之后,点击按钮,完成水平位置的校准8.3、在将飞控板左向放置之后,点击按钮,完成向左方向的校准8.4、在将飞控板右向放置之后,点击按钮,完成向右方向的校准8.5、在将飞控板向下放置之后,点击按钮,完成向下方向的校准8.6、在将飞控板向上放置之后,点击按钮,完成向上方向的校准8.7、在将飞控板背面向上放置之后,点击按钮,完成翻转方向的校准8.8、所有姿态都完成之后,会显示校准成功。
9、“罗盘”校准9.1对罗盘进行校准时,点击“罗盘”选项,进入“罗盘”选项界面,接着点击“现场校准界面”,进入校准界面。
旋转飞控板,使得所有白点都被经过,痕迹形成一个完整的球形。
9.2 校准完成后,点击“Done”按钮,或者信息采集完成后,软件会自动跳转,接着显示,校准好的罗盘的数据。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、打开Mission Planner 软件,进入初始设置选项
选择串口为 COM4 PX4 FMU(COM4),波特率设置为 115200
2、选择安装固件-》加载自定义固件
会弹出一个文件选择对话框,来选择自定义文件
巧币叩讥屋冃腳■芹・:壬厂甲㈡克milTF 去口 1"
f 在辑赵SI 岂也#
丄11 MJU AlYNk P 【dMF dW NFf 1 电写F !4 ExtlMder 3、点击自定义文件,选择“打开”选项,选中该文件, 选中的文件开始被下载到开发板上。
Km Avifw LlJIlbud LJL 勇应L 吻關
I.
5、等音乐停止之后,点击“ 0K ”按钮之后,就可以完成飞控板的软件下载操作。
会显示提示“ Upload
Done ”,即下载完成。
6.此时点击右上角的“连接”图标,就可以连接到飞控板上,对飞控板的参数进行调试 。
此时,界面出
现一个新增的“必要硬件”选项,点击该选项,会发现该选项下面包含
下载完成后,会显示提示,要求在飞控板上的音乐停止之后,再点击“ 0K ”按钮 Sir.AM 1** 4血时: htM 卄血 幻工 |. 口 ! iH «<tWWJFMd 比站小*El ■鬲“百士虑吹
个选项,“机架类型”、“飞行模式”、“故障保护”三个选项可以选择自定义模式, 度计校准”、“罗盘”、“遥控器校准”三个选项则需要自己进行校准。
飞1i«ht
養I■杞-“加速
l^trnw -\rT*p tlkrifS ftBUiK Wft *U _~ ~~ 7、“机架类型”选项可以选择默认
& 1、“加速度计校准”需要自己校准,点击“校准加速度计”进入校准
,8.2、在将飞控板水平放置之后,点击按钮,完成水平位置的校准
IVUMA 怖幔 會③
H1MB W
W UM IN* 少怡(3
口 [□鬼 冃导
>¥3tr|-K^
nreuiai J*^u+ ¥4J4 Lwd ud ti +u ur
■连虎计枝丸
歸■驚护 sir”#
8.3、在将飞控板左向放置之后,点击按钮,完成向左方向的校准
飞斤■«! T.frrffl VH-4||E aid 浮・ Ktfi
Haia Fihid# ifc I lib iUIFT Hl da H >3 |i ■■■ uy bFy
Eli 楼式
8.4、在将飞控板右向放置之后,点击按钮,完成向右方向的校准
占 ^rdkit«4«r Vti
V.MtK 帕 W 呼・
園鬣初砧审口
机果美■
wia«TtKA
8.5、在将飞控板向下放置之后,点击按钮,完成向下方向的校准
鼻■聿星 血
酬庚计腔■
8.6、在将飞控板向上放置之后,点击按钮,完成向上方向的校准
3 Mmtr* buhl 1_二$泌血“ WiZnptar 引:hia | 旦
■\i-Rli配B鼻武
(3
■也
L m
SOX
m电at计校冶
■L疙夬:X Pi.ua whiil-i u*» It ut ■ +U UF
Iff ■贰9、“罗盘”校准
9.1对罗盘进行校准时,点击“罗盘”选项,进入“罗盘”选项界面,接着点击“现场校准界面”,进入校准界面。
8.7、在将飞控板背面向上放置之后,点击按钮,完成翻转方向的校准
& &所有姿态都完成之后,会显示校准成功。
了牝1血足脚
10、“遥控器校准”
打开有线或者无线的遥控终端,进入“遥控器校准”界面,点击“校准遥控”按钮。
就 可以对遥控器进行校准。
每次都需要将要校准的摇杆拉到最小值和最大值。
取■帝护 严 --------
H8M Hru tfi HRffl ttfH fJ* 皿 •鮎・HHFt
旋转飞控板,使得所有白点都被经过,痕迹形成一个完整的球形。
9.2校准完成后,点击“ Done ”按钮,或者信息采集完成后,软件会自动跳转,接着显 示,校准好的罗
盘的数据。
21 Mis^or Planner 1^.25 build 1.1.55t-fc.4£lJ5& ArduCopter Vi.2.1-rc^ l5fllfab2^.: 飞行狗抹飞行计划初*餐舌阳嵩硯试 W 裁希 話助 霍眶
廖觀約禺己匚][□鬼 安装固件
向导 机架娶型
扣速度计较淮
号凰 • Hxhkwk/IX4
逞腔答校理
飞行楼式
嫌障保护
工、可基理件 NzrFfhHh u e 136 129 74 Ih.es a have been ssirad. fsz v^- 严诙亦删 ------------------------------------ 田 內奧齧蛊.M1ALI0H BOHI 测外蛊罗鑒 RDTAnO«_ED(LL_lW 1K4 內対蛊娶盘.K )rATt01f_lKirE
I 如 lAT :LJi£UL lzHl
d o
» 处
nffus
3止:JEK
叶 TW E>T 1>3 '■P 侶 I MTIF p "'FW1 «W H 4i 飞存肚n 飞fin 农I Wfl-fljl
la 董 & jgi/te*克嘉餐-严葩科如齐a-tr- 目爲M 常科胃■.便■ 畫十N 咅由 f 申Ai-曰
有*
Q 启陶
田白动 腹"井
冋碍
«l*XS 扭邃戎tl
暑肃 爭a
飞冇■虑
» 可 BWF
确保开发板开着,
接收器有电源供
电,并确保遥控器
有电源供电,没有
加载油门。
Em sure your tr snEmitter is “n and receiver is povered and connected
Ensure jroux motor net haye : pow^r/nQ props
在每次使得拉杆拉到最大和最小值之后,红线就会达到顶部。
Click OK arid mo^e all BC sticks and tch«s to th^ir
extreme post Li ons so the red lairs hit th.e lirmi ls…
布rfll
s lrtiGX afR'li'i «L 冷商 SB ) 勺£ O 匚]口 *W 亠 £2
OK
01
拉杆操作完成后的效果图: 校准完成后,需要保证所有的摇杆都在中间位置,关掉油门。
Ml T M
Ensur« d.1 youx sticks 戡咅 c«nt«r«d and throttle i s down, uid click ok
> continue
最后会显示校准的摇杆参数
Hwe- 世电 the detected, railo optioivE
HOTE Ch^jmels not connected are di splayed as 1500 +~2
H oirmal Tralnes e around. 1 100 I 1900
Channel: N in | Flax
11、“飞行模式”设置
有各种各样的“飞行模式“可以用来进行设置,选择自己需要的模式,进行保存就可以 了。
CCCCCCCC 44494444 SG 也
旧百
Q OOOOOOOD 444944M ^ 33333333 Qtf Qu Qrf- QJ
12、“故障保护”选项,选择默认的值就可以了。