第4章间接平差原理
合集下载
间接平差

x 2 ( X 1 x1 )
0 2
0
v4 ( X
0
x2) H
A
B
x 1 ( h1 X 1 H
)
0 2 0 2
x1 x 2 (h2 X
X1 ) X1 )
B 0
0
x1 x 2 (h2 X
x 2 (h4 X
0
A 0
x 2 ( X 1 x1)
x2 H
C
v4 X 1 x1 H
0
B
B
x 1 ( h1 X 1 H
A
)
0 2
x1 x 2 (h2 X
X1 ) ) )
0
x 2 ( h3 X
0 2 0
H
C
x1 (h4 X 1 H
B
v3 X
2
H
2
A
v4 X
H
B
v5 X 1 X
2
v6 X 1 X
2
v 1 v2 v3 v 4 v 5 v6
X 1 H
A
h1
B
X 1 H
h2
X
2
0
X 1 H
h1
B
140 x 1
X
2
X
0 2
x2
X 1 H
h2
条件平差与间接平差的相互关系
条件平差与间接平差的相互关系
一、条件平差与间接平差
1、条件平差与间接平差是指:条件平差是指基础数据是现有被观
测坐标信息,假定各点位置坐标值满足一定近似关系时(即解算中假
定有约束关系或条件,以达到所求结果的平差方法);而间接平差是指,基础数据是待测点的被观测量,包括方位量、距离量等,无任何
关系的前提条件,是一种完全无条件的平差方法。
二、条件平差
2、条件平差一般会把条件设置为两个系统中坐标值的差值最小,
这样就能够更容易地实现平差。
条件平差的典型应用是重叠法平差,
它会利用各观测值之间的内在联系,并通过设定一定的几何条件,使
其之间被观测量满足某一关系,以解决无条件方程组的平差问题。
三、间接平差
3、间接平差是指以被观测量构成的方程组,可以以各种迭代方法
求解,但是必须有一定的条件限制才能使解出的坐标值符合实际要求。
加拿大匹兹堡大学的Bloch教授认为,从下面几个原因考虑起,最好
用间接平差来解决坐标转换的问题:
(1)传统的解算序号很容易引起原点偏移和比例错误;
(2)间接平差可以很好地表示待解系统中的不确定性;
(3)使用间接平差可以很好地降低待解系统中分量精度和消隐关
系统时发生的偏差。
四、条件平差与间接平差的关系
4、条件平差与间接平差是有联系的,相互之间的联系是:可以把
条件平差看做是一种特殊的间接平差,即在无条件间接平差的基础上,再加入解算中的限制条件,以达到所求结果。
可以说,条件平差是间
接平差的分支,而间接平差是条件平差的总集合。
第四章-间接平差

X~1 X~ 2
L~2 L~3
,
X~ 1 X~ 2
L~2 L~2
,
X~ 1 X~ 2
L~4 L~6
,
2020/1/3
20
§4-2 误差方程
等因,为X综它~1上们 所X都~2述是,函采数BA用独C间立。接的平。差但,不应能该选选取定X~刚1 好L~t2个, X~而2 又 L~4,
Z ,则
的协因数阵为 QLL
QZZ
QXˆL QQVLˆLL
QLXˆ Q XˆXˆ QVXˆ QLˆXˆ
QLV Q XˆV QVV QLˆV
QLLˆ Q XˆLˆ
QVLˆ QLˆLˆ
式中对角线上子矩阵,就是各基本向量的自协因数阵,非 对角线上为两向量的互协因数阵。
Error Theory and Fundation of Surveying Adjustment
主讲:喻铮铮 单位:许昌学院城市与环境学院
2020/1/3
1
第一章 绪论
第二章 误差理论基础
内
第三章 平差数学模型与最小二乘原理
容
第四章 间接平差
第五章 条件平差
提
第六章 附有参数的条件平差
要
第七章 附有约束条件的间接平差 第八章 参数加权平差和分组平差
1、单位权中误差的计算
中误差为 ˆ 0
V T PV nt
计算VTPV,可将误差方程代入后计算,即
V T PV Bxˆ lT PV xˆT BT PV lT PV ,
顾及式BTPV=0
V T PV lT PBxˆ l lT Pl lT PBxˆ
测量程序设计_条件平差和间接平差
程序代码如下:
disp(‘-------水准网间接平差示例-------------’) disp(‘已知高程’) Ha = 5.015 % 已知点高程,单位m Hb = 6.016 % 已知点高程,单位m
A h2 D h1
C h6 E h7 B h4
h5
h3
disp(‘观测高差,单位m’)
L = [1.359; 2.009; 0.363; 1.012; 0.657; -0.357] disp(‘系数矩阵B’)
则: PV AT K
V P A K QA K
T
1 T
4、法方程: 将条件方程 AV+W=0代入到改正数方程V=QATK 中,则得到:
AQAT K W 0
r1 r1 r1
记作: 由于
N aa K W 0
rr
R( Naa ) R( AQAT ) R( A) r
Naa为满秩方阵, K Naa1W ( AQAT )1 ( AL A0 )
if H(1,1)+H(2,1)-H(3,1)+HA-HB==0 && H(2,1)H(4,1)==0 disp(‘检核正确') else disp(‘检核错误') end disp(‘平差后的高程值') HC = HA + H(1,1) HD = HA + H(1,1) + H(4,1)
二、间接平差的基本原理
其中l=L-d.
ˆ 设误差Δ和参数X的估计值分别为V 和 X
则有
ˆ V AX l
X0 为了便于计算,通常给参数估计一个充分接近的近似值
ˆ ˆ X X0 x
则误差方程表示为
间接平差原理

函数非线性要将其线性化,列出误差方程。
3、由误差方程系数B和自由项组成法方程。 4、解算法方程,求
ˆ x
,计算参数的平差值
0 ˆ ˆ。 X X x
5、由误差方程计算V,求出观测量平差值 L L V
。
ˆ L V 和 ,进而求出 L
。
一、间接平差一般原理
则有:
T ˆ ˆ l ) min ( Bx l ) P( Bx
按数学上求函数自由极值的方法,得
V PV V T 2V P V T PB 0 ˆ ˆ x x
T
转置后得:
则有:
间接平差的基础方程
解此基础方程,有:
可得
即:
一般地,间接平差的函数模型为
(4-1-1)
平差时,为了计算方便和计算的数值稳定性,一般对参数都 取近似值,令 代入(4-1-1)式,并令
由此可得误差方程
3、间接平差的随机模型
4、平差准则
V PV min
T
5、间接平差的目的
求解极值条件方程组: 和
,得到
0 ˆ ˆ X X x
V
ˆ x
第4章 间接平差
§4-1 间接平差原理
知识回顾:
1、间接平差法(参数平差法):是通过选定t个与观测值
有一定关系的独立未知量作为参数,将每个观测值都分别
表达成这t个参数的函数,建立函数模型,按最小二乘原理,
用求函数极值的方法解出参数的最或然值,从而求得各观 测值的平差值。
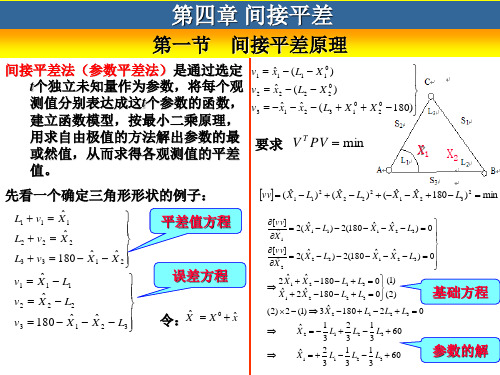
2、间接平差法的误差方程 例如,在一个三角形中,等精度独立观测了三个角,观测 值分别为L1、L2和L3。求此三角形各内角的最或然值。若能选 取两个内角的最或然值作为参数 X ˆ 、X ˆ ,则可以建立参数 1 2 与观测值之间的函数关系式
测量平差基础课件——间接平差原理

令: Xˆ X 0 xˆ
l L (BX 0 d ) L L0
则有: V Bxˆ l
一、间接平差原理
设有n个观测值L ,必要观测个数为t,
选定t个独立参数 Xˆ 近似值取为X 0,有
Xˆ X 0 xˆ
L LV
平差值方程为:
Li vi ai X 1 bi X 2 ti X t di
P 0 0
1 0
0 1
0 0
2
0 0 0 2
6
第一节 间接平差原理
3.组成法方程
Nbb
BT PB
5 1
1
2
W
BT Pl
11 7
5 1
1
2
xˆ1 xˆ2
11 7
0
4.解算法方程
Xˆ 1
Xˆ 2
观测值 平差值
V Bxˆ l [1.7,2.7,2.7,0.3] xˆ1
令:L n,1
L1
L2 Ln T
a1 b1 t1
V
n,1
V1
V2 Vn T
B a2
b2
t
2
Xˆ
t ,1
Xˆ 1
d
n,1
d1
Xˆ 2 Xˆ t T n,t
d 2 d n T
an
bn
t
n
L V BXˆ d
3
第一节 间接平差原理
L V BXˆ d
xˆ
2
5 1
1 1
2
11 7
1 9
2 1
5.求改正数
1 11 1.7 5 7 2.7(mm)
T
hhˆˆ12 hhˆˆ43
h1 h2 hh43
误差理论与测量平差基础间接平差.pptx

2、未知数的选择 选择原则:a、所选取t个待估参数必须相互独立; b、所选取t个待估参数与观测值的函数 关系容易写出来。
第5页/共48页
3、不同情况下未知数的选择及误差方程的列立
(1)、水准网
在水准网平差中,通常选t个待定点的高程平差
值作为待估参数。这样选 既足数,又独立, 而且容易写出参数 与观测值之间的函 Xˆ数1 关Hˆ系E , 。Xˆ 2如 图Hˆ F,选
由于观测值 y 有误差,故由上式可得曲线拟合
的误差方v程i 为aˆ:0 aˆ1xi aˆ2 xi2 aˆ3 xi3 yi
b、曲面拟合
曲面拟合在DEM、GPS水准等工作中常常用到。 将地H面i 视 为a0 一 a个1x连i 续a2的yi 曲 a面3 x,i2 则a高4 yi程2 可a5表xi y达i 为平面 坐标的函数,且可用多项式表达为:
有足够起算数据的三边网与三角网一样,也是
选m个待定点的坐标平差值作为待估参数,即
t=2m 。一般地,边长观测值可由下图表示,于是
k
有:
Si
j
vi ( Xˆ k Xˆ j )2 (Yˆk Yˆj )2 Si
第15页/共48页
例如在下图,我们选 Xˆ1 Xˆ C , Xˆ 2 YˆC , Xˆ 3 Xˆ D , Xˆ 4 YˆD
教材:7-5 习题:7.2.16
第17页/共48页
(5)、导线网
导线网为特殊的边角网,其必要观测数t=2m
(m为待定点个数),其观测值为角度观测值和边
长观测值两类。所以误差方程也是角度误差方程和
边长误差方程两类。
vi ˆik ˆij arctan
可Yˆk以先Yˆi Xˆ k Xˆ
列角度误 arctan
第5页/共48页
3、不同情况下未知数的选择及误差方程的列立
(1)、水准网
在水准网平差中,通常选t个待定点的高程平差
值作为待估参数。这样选 既足数,又独立, 而且容易写出参数 与观测值之间的函 Xˆ数1 关Hˆ系E , 。Xˆ 2如 图Hˆ F,选
由于观测值 y 有误差,故由上式可得曲线拟合
的误差方v程i 为aˆ:0 aˆ1xi aˆ2 xi2 aˆ3 xi3 yi
b、曲面拟合
曲面拟合在DEM、GPS水准等工作中常常用到。 将地H面i 视 为a0 一 a个1x连i 续a2的yi 曲 a面3 x,i2 则a高4 yi程2 可a5表xi y达i 为平面 坐标的函数,且可用多项式表达为:
有足够起算数据的三边网与三角网一样,也是
选m个待定点的坐标平差值作为待估参数,即
t=2m 。一般地,边长观测值可由下图表示,于是
k
有:
Si
j
vi ( Xˆ k Xˆ j )2 (Yˆk Yˆj )2 Si
第15页/共48页
例如在下图,我们选 Xˆ1 Xˆ C , Xˆ 2 YˆC , Xˆ 3 Xˆ D , Xˆ 4 YˆD
教材:7-5 习题:7.2.16
第17页/共48页
(5)、导线网
导线网为特殊的边角网,其必要观测数t=2m
(m为待定点个数),其观测值为角度观测值和边
长观测值两类。所以误差方程也是角度误差方程和
边长误差方程两类。
vi ˆik ˆij arctan
可Yˆk以先Yˆi Xˆ k Xˆ
列角度误 arctan
第4章间接平差原理
第四章 间接平差
第一节 间接平差原理
ˆ 间接平差法(参数平差法)是通过选定 v1 = x1 − ( L1 − X 10 ) 间接平差法(参数平差法) t个独立未知量作为参数,将每个观 v2 = x2 − ( L2 − X 20 ) 个独立未知量作为参数, ˆ 测值分别表达成这t个参数的函数, 测值分别表达成这t个参数的函数, v3 = − x1 − x2 − ( L3 + X 10 + X 20 − 180) ˆ ˆ 建立函数模型,按最小二乘原理, 建立函数模型,按最小二乘原理, T 用求自由极值的方法解出参数的最 要求 V PV = min X1 或然值, 或然值,从而求得各观测值的平差 值。
− ˆ x = N bb1W
ˆ x = ( B T PB ) −1 B T Pl
5.求观测值改正数 5.求观测值改正数
ˆ ˆ X = X0 +x l = L − ( BX 0 + d )
ˆ V = Bx − l
6.求平差值 6.求平差值
L = L +V,
∧
ˆ V = Bx − l
3.组成法方程 3.组成法方程
3
第四章 间接平差
第一节
二、计算步骤 1.确定t,选 个独立量为参数X. 1.确定t,选t个独立量为参数X. 确定t, 2.列立误差方程 2.列立误差方程 ˆ L + V = BX + d 或
ˆ 或L + V = f ( X )
间接平差原理
4.解算法方程 4.解算法方程,求参数的改正数 解算法方程,
平差值
ˆ ˆ X = X0 + x ∧ L = L +V
∧ ∧
平差值方程为: 平差值方程为: 令:nL1 = [L1 ,
第一节 间接平差原理
ˆ 间接平差法(参数平差法)是通过选定 v1 = x1 − ( L1 − X 10 ) 间接平差法(参数平差法) t个独立未知量作为参数,将每个观 v2 = x2 − ( L2 − X 20 ) 个独立未知量作为参数, ˆ 测值分别表达成这t个参数的函数, 测值分别表达成这t个参数的函数, v3 = − x1 − x2 − ( L3 + X 10 + X 20 − 180) ˆ ˆ 建立函数模型,按最小二乘原理, 建立函数模型,按最小二乘原理, T 用求自由极值的方法解出参数的最 要求 V PV = min X1 或然值, 或然值,从而求得各观测值的平差 值。
− ˆ x = N bb1W
ˆ x = ( B T PB ) −1 B T Pl
5.求观测值改正数 5.求观测值改正数
ˆ ˆ X = X0 +x l = L − ( BX 0 + d )
ˆ V = Bx − l
6.求平差值 6.求平差值
L = L +V,
∧
ˆ V = Bx − l
3.组成法方程 3.组成法方程
3
第四章 间接平差
第一节
二、计算步骤 1.确定t,选 个独立量为参数X. 1.确定t,选t个独立量为参数X. 确定t, 2.列立误差方程 2.列立误差方程 ˆ L + V = BX + d 或
ˆ 或L + V = f ( X )
间接平差原理
4.解算法方程 4.解算法方程,求参数的改正数 解算法方程,
平差值
ˆ ˆ X = X0 + x ∧ L = L +V
∧ ∧
平差值方程为: 平差值方程为: 令:nL1 = [L1 ,
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
令: 误差方程 则有: 则有:
ˆ B T PBx − B T Pl = 0
N bb = B T PB, W = B T Pl
t ,t t ,1
则上式变为: 则上式变为:
ˆ V = Bx − l
要求: V T PV = min 要求: 令: 则有: 则有:
ˆ N bb x − W = 0
法方程
法方程的解: 法方程的解: − ˆ x = N bb1W
平差值
ˆ ˆ X = X0 + x ∧ L = L +V
∧ ∧
平差值方程为: 平差值方程为: 令:nL1 = [L1 ,
V = [V1
n ,1
一般地:设有n个观测值 一般地:设有n ∧ ˆ L = B X+ d
n, 1 n, t t , 1 n, 1
Li + vi = ai X 1 + bi X 2 + L + t i X t + d i
ˆ x = ( B T PB ) −1 B T Pl
∧
对自变量X求导,令一阶导数为0 对自变量X求导,令一阶导数为0,即: 或
∂V T PV ∂V = 2V T P = V T PB = 0 ˆ ˆ ∂x ∂x
观测值和参数的平差值: 观测值和参数的平差值:
L = L +V, ˆ ˆ X = X0 + x
− ˆ x = N bb1W
ˆ x = ( B T PB ) −1 B T Pl
5.求观测值改正数 5.求观测值改正数
ˆ ˆ X = X0 +x l = L − ( BX 0 + d )
ˆ V = Bx − l
6.求平差值 6.求平差值
L = L +V,
∧
ˆ V = Bx − l
3.组成法方程 3.组成法方程
第四章 间接平差
第一节 间接平差原理
ˆ 间接平差法(参数平差法)是通过选定 v1 = x1 − ( L1 − X 10 ) 间接平差法(参数平差法) t个独立未知量作为参数,将每个观 v2 = x2 − ( L2 − X 20 ) 个独立未知量作为参数, ˆ 测值分别表达成这t个参数的函数, 测值分别表达成这t个参数的函数, v3 = − x1 − x2 − ( L3 + X 10 + X 20 − 180) ˆ ˆ 建立函数模型,按最小二乘原理, 建立函数模型,按最小二乘原理, T 用求自由极值的方法解出参数的最 要求 V PV = min X1 或然值, 或然值,从而求得各观测值的平差 值。
3
第四章 间接平差
第一节
二、计算步骤 1.确定t,选 个独立量为参数X. 1.确定t,选t个独立量为参数X. 确定t, 2.列立误差方程 2.列立误差方程 ˆ L + V = BX + d 或
ˆ 或L + V = f ( X )
间接平差原理
4.解算法方程 4.解算法方程,求参数的改正数 解算法方程,
2011-9-23
ˆ ˆ ˆ ˆ [vv] = ( X 1 − L1 ) 2 + ( X 2 − L2 ) 2 + (− X 1 − X 2 + 180 − L3 ) 2 = min
∂[vv] ˆ ˆ ˆ = 2( X 1 − L1 ) − 2(180 − X 1 − X 2 − L3 ) = 0 ˆ ∂X 1 ∂[vv] ˆ − L ) − 2(180 − X − X − L ) = 0 ˆ ˆ = 2( X 2 2 1 2 3 ˆ ∂X 2 ˆ ˆ 2 X 1 + X 2 − 180 − L1 + L3 = 0 (1) ⇒ ˆ ˆ 基础方程 X 1 + 2 X 2 − 180 − L2 + L3 = 0 (2) ˆ (2) × 2 − (1) ⇒ 3 X − 180 + L − 2 L + L = 0
T
−1
间接平差原理
ˆ X1
ˆ X2
4.解算法方程 4.解算法方程
观测值 平差值
ˆ x1 5 − 1 11 1 2 1 11 1.7 x = − 1 2 ⋅ − 7 = 9 ⋅ 1 5 ⋅ − 7 = − 2.7 ( mm) ˆ2 ˆ h1 h1 v1 1.003 1.0047 1.7 ˆ h2 = h2 + v 2 = 0.501 (m) + 2.7 ( mm) = 0.5037 (m) ˆ h h3 v3 0.503 0.5003 − 2.7 5.求改正数 5.求改正数 3 ˆ h4 h4 v 4 0.505 0.5047 − 0.3 T
L t1 L t2 L L L tn
ˆ L + V = BX + d
2011-9-23 2
第四章 间接平差
第一节
ˆ L + V = BX + d
间接平差原理
将基础方程第一式代入第二式,得: 将基础方程第一式代入第二式,
令:
ˆ ˆ X = X0 +x l = L − ( BX 0 + d )
6
第四章 间接平差
第二节
一、参数个数的确定 参数的个数等于必要观测个数。 参数的个数等于必要观测个数。
误差方程的列立
二、参数的选取
可以选直接观测值的平差值,也可以选 可以选直接观测值的平差值, 非直接观测量的平差值, 非直接观测量的平差值,甚至二者 水准网:有已知点:等于待定点个数。 水准网:有已知点:等于待定点个数。 兼而有之。要保证参数独立 参数独立。 兼而有之。要保证参数独立。 无已知点:待定点数减1 无已知点:待定点数减1。 水准网一般选待定点高程平差值; 水准网一般选待定点高程平差值; 测角网:有四个必要的起算数据, 测角网:有四个必要的起算数据,等于 三角网和导线网选待定点坐标平差值。 三角网和导线网选待定点坐标平差值。 倍待定点数。 2倍待定点数。 三、误差方程的列立 少于四个必要起算数据, 少于四个必要起算数据,等于 方法: 方法:把观测值表示成所选参数的函数 倍总点数减4 2倍总点数减4。 水准网和GPS网一般是线性的 网一般是线性的, 测边网、边角网、导线网:有四个必要 水准网和GPS网一般是线性的,三角网 测边网、边角网、导线网: 的起算数据,等于2倍待定点数。 的起算数据,等于2倍待定点数。 和导线网一般为非线性的。 和导线网一般为非线性的。如图测 角网, 点坐标平差值为参数: 角网,选D点坐标平差值为参数: 少于四个必要起算数据, 少于四个必要起算数据,等于 ˆ ˆ Y − YD Y − YD 倍总点数减3 ˆ 2倍总点数减3。 ˆ ˆ L1 = α DB − α DA = arctan B − arctan A
B T PV = 0
P为对角阵 基础方程
ˆ V = Bx − l B T PV = 0
2011-9-23
ˆ ˆ ˆ [ paa ]x1 + [ pab]x 2 + L + [ pat ] xt = [ pal ] ˆ ˆ ˆ [ pab] x1 + [ pbb]x 2 + L + [ pbt ]xt = [ pbl ] LLLLLLL ˆ ˆ ˆ [ pat ] x1 + [ pbt ]x 2 + L + [ ptt ] xt = [ ptl ]
0 − 7 l= 0 2
ˆ v 4 = x1 − (h4 − X 10 + H B )
2011-9-23
2 0 P= 0 0
0 0 0 1 0 0 0 1 0 0 0 2
第四章 间接平差
第一节
3.组成法方程 3.组成法方程
5 − 1 N bb = B PB = − 1 2 11 W = BT Pl = − 7 ˆ 5 − 1 x1 11 ⋅ − = 0 − 1 2 x ˆ2 − 7
ˆ XB − XD
2011-9-23
ˆ XA − XD
7
第四章 间接平差
第二节 误差方程的列立
二、参数的选取 可以选直接观测值的平差值,也可以选 可以选直接观测值的平差值, 非直接观测量的平差值, 非直接观测量的平差值,甚至二者 兼而有之。要保证参数独立 参数独立。 兼而有之。要保证参数独立。 水准网一般选待定点高程平差值; 水准网一般选待定点高程平差值; 三角网和导线网选待定点坐标平差值。 三角网和导线网选待定点坐标平差值。 三、误差方程的列立 再如下图的测边网: 再如下图的测边网: 方法:把观测值表示成所选参数的函数 方法: 水准网和GPS网一般是线性的 水准网和GPS网一般是线性的,三角网 网一般是线性的, 和导线网一般为非线性的。 和导线网一般为非线性的。如图测 角网, 点坐标平差值为参数: 角网,选D点坐标平差值为参数:
ˆ V = Bx − l = [1.7,2.7,−2.7,−0.3]
参数平差值
6.求平差值 6.求平差值
2011-9-23
ˆ ˆ X 1 X 10 x1 12.003 1 .7 12.0047 = 0 + = ˆ (m) + − 2.7 (mm) = 12.5083 ( m) ˆ X 2 X 2 x 2 12.511
0 ˆ 选定t 选定t个独立参数 X 近似值取为 X ,有
2 1 1 ˆ L1 = X 1 = + L1 − L2 − L3 + 60 3 3 3 ∧ 1 2 1 ˆ L 2 = X 2 = − L1 + L2 − L3 + 60 3 3 3 ∧ 1 1 2 L 3 = − L1 − L2 + L3 + 60 观测值 3 3 3
ˆ B T PBx − B T Pl = 0
N bb = B T PB, W = B T Pl
t ,t t ,1
则上式变为: 则上式变为:
ˆ V = Bx − l
要求: V T PV = min 要求: 令: 则有: 则有:
ˆ N bb x − W = 0
法方程
法方程的解: 法方程的解: − ˆ x = N bb1W
平差值
ˆ ˆ X = X0 + x ∧ L = L +V
∧ ∧
平差值方程为: 平差值方程为: 令:nL1 = [L1 ,
V = [V1
n ,1
一般地:设有n个观测值 一般地:设有n ∧ ˆ L = B X+ d
n, 1 n, t t , 1 n, 1
Li + vi = ai X 1 + bi X 2 + L + t i X t + d i
ˆ x = ( B T PB ) −1 B T Pl
∧
对自变量X求导,令一阶导数为0 对自变量X求导,令一阶导数为0,即: 或
∂V T PV ∂V = 2V T P = V T PB = 0 ˆ ˆ ∂x ∂x
观测值和参数的平差值: 观测值和参数的平差值:
L = L +V, ˆ ˆ X = X0 + x
− ˆ x = N bb1W
ˆ x = ( B T PB ) −1 B T Pl
5.求观测值改正数 5.求观测值改正数
ˆ ˆ X = X0 +x l = L − ( BX 0 + d )
ˆ V = Bx − l
6.求平差值 6.求平差值
L = L +V,
∧
ˆ V = Bx − l
3.组成法方程 3.组成法方程
第四章 间接平差
第一节 间接平差原理
ˆ 间接平差法(参数平差法)是通过选定 v1 = x1 − ( L1 − X 10 ) 间接平差法(参数平差法) t个独立未知量作为参数,将每个观 v2 = x2 − ( L2 − X 20 ) 个独立未知量作为参数, ˆ 测值分别表达成这t个参数的函数, 测值分别表达成这t个参数的函数, v3 = − x1 − x2 − ( L3 + X 10 + X 20 − 180) ˆ ˆ 建立函数模型,按最小二乘原理, 建立函数模型,按最小二乘原理, T 用求自由极值的方法解出参数的最 要求 V PV = min X1 或然值, 或然值,从而求得各观测值的平差 值。
3
第四章 间接平差
第一节
二、计算步骤 1.确定t,选 个独立量为参数X. 1.确定t,选t个独立量为参数X. 确定t, 2.列立误差方程 2.列立误差方程 ˆ L + V = BX + d 或
ˆ 或L + V = f ( X )
间接平差原理
4.解算法方程 4.解算法方程,求参数的改正数 解算法方程,
2011-9-23
ˆ ˆ ˆ ˆ [vv] = ( X 1 − L1 ) 2 + ( X 2 − L2 ) 2 + (− X 1 − X 2 + 180 − L3 ) 2 = min
∂[vv] ˆ ˆ ˆ = 2( X 1 − L1 ) − 2(180 − X 1 − X 2 − L3 ) = 0 ˆ ∂X 1 ∂[vv] ˆ − L ) − 2(180 − X − X − L ) = 0 ˆ ˆ = 2( X 2 2 1 2 3 ˆ ∂X 2 ˆ ˆ 2 X 1 + X 2 − 180 − L1 + L3 = 0 (1) ⇒ ˆ ˆ 基础方程 X 1 + 2 X 2 − 180 − L2 + L3 = 0 (2) ˆ (2) × 2 − (1) ⇒ 3 X − 180 + L − 2 L + L = 0
T
−1
间接平差原理
ˆ X1
ˆ X2
4.解算法方程 4.解算法方程
观测值 平差值
ˆ x1 5 − 1 11 1 2 1 11 1.7 x = − 1 2 ⋅ − 7 = 9 ⋅ 1 5 ⋅ − 7 = − 2.7 ( mm) ˆ2 ˆ h1 h1 v1 1.003 1.0047 1.7 ˆ h2 = h2 + v 2 = 0.501 (m) + 2.7 ( mm) = 0.5037 (m) ˆ h h3 v3 0.503 0.5003 − 2.7 5.求改正数 5.求改正数 3 ˆ h4 h4 v 4 0.505 0.5047 − 0.3 T
L t1 L t2 L L L tn
ˆ L + V = BX + d
2011-9-23 2
第四章 间接平差
第一节
ˆ L + V = BX + d
间接平差原理
将基础方程第一式代入第二式,得: 将基础方程第一式代入第二式,
令:
ˆ ˆ X = X0 +x l = L − ( BX 0 + d )
6
第四章 间接平差
第二节
一、参数个数的确定 参数的个数等于必要观测个数。 参数的个数等于必要观测个数。
误差方程的列立
二、参数的选取
可以选直接观测值的平差值,也可以选 可以选直接观测值的平差值, 非直接观测量的平差值, 非直接观测量的平差值,甚至二者 水准网:有已知点:等于待定点个数。 水准网:有已知点:等于待定点个数。 兼而有之。要保证参数独立 参数独立。 兼而有之。要保证参数独立。 无已知点:待定点数减1 无已知点:待定点数减1。 水准网一般选待定点高程平差值; 水准网一般选待定点高程平差值; 测角网:有四个必要的起算数据, 测角网:有四个必要的起算数据,等于 三角网和导线网选待定点坐标平差值。 三角网和导线网选待定点坐标平差值。 倍待定点数。 2倍待定点数。 三、误差方程的列立 少于四个必要起算数据, 少于四个必要起算数据,等于 方法: 方法:把观测值表示成所选参数的函数 倍总点数减4 2倍总点数减4。 水准网和GPS网一般是线性的 网一般是线性的, 测边网、边角网、导线网:有四个必要 水准网和GPS网一般是线性的,三角网 测边网、边角网、导线网: 的起算数据,等于2倍待定点数。 的起算数据,等于2倍待定点数。 和导线网一般为非线性的。 和导线网一般为非线性的。如图测 角网, 点坐标平差值为参数: 角网,选D点坐标平差值为参数: 少于四个必要起算数据, 少于四个必要起算数据,等于 ˆ ˆ Y − YD Y − YD 倍总点数减3 ˆ 2倍总点数减3。 ˆ ˆ L1 = α DB − α DA = arctan B − arctan A
B T PV = 0
P为对角阵 基础方程
ˆ V = Bx − l B T PV = 0
2011-9-23
ˆ ˆ ˆ [ paa ]x1 + [ pab]x 2 + L + [ pat ] xt = [ pal ] ˆ ˆ ˆ [ pab] x1 + [ pbb]x 2 + L + [ pbt ]xt = [ pbl ] LLLLLLL ˆ ˆ ˆ [ pat ] x1 + [ pbt ]x 2 + L + [ ptt ] xt = [ ptl ]
0 − 7 l= 0 2
ˆ v 4 = x1 − (h4 − X 10 + H B )
2011-9-23
2 0 P= 0 0
0 0 0 1 0 0 0 1 0 0 0 2
第四章 间接平差
第一节
3.组成法方程 3.组成法方程
5 − 1 N bb = B PB = − 1 2 11 W = BT Pl = − 7 ˆ 5 − 1 x1 11 ⋅ − = 0 − 1 2 x ˆ2 − 7
ˆ XB − XD
2011-9-23
ˆ XA − XD
7
第四章 间接平差
第二节 误差方程的列立
二、参数的选取 可以选直接观测值的平差值,也可以选 可以选直接观测值的平差值, 非直接观测量的平差值, 非直接观测量的平差值,甚至二者 兼而有之。要保证参数独立 参数独立。 兼而有之。要保证参数独立。 水准网一般选待定点高程平差值; 水准网一般选待定点高程平差值; 三角网和导线网选待定点坐标平差值。 三角网和导线网选待定点坐标平差值。 三、误差方程的列立 再如下图的测边网: 再如下图的测边网: 方法:把观测值表示成所选参数的函数 方法: 水准网和GPS网一般是线性的 水准网和GPS网一般是线性的,三角网 网一般是线性的, 和导线网一般为非线性的。 和导线网一般为非线性的。如图测 角网, 点坐标平差值为参数: 角网,选D点坐标平差值为参数:
ˆ V = Bx − l = [1.7,2.7,−2.7,−0.3]
参数平差值
6.求平差值 6.求平差值
2011-9-23
ˆ ˆ X 1 X 10 x1 12.003 1 .7 12.0047 = 0 + = ˆ (m) + − 2.7 (mm) = 12.5083 ( m) ˆ X 2 X 2 x 2 12.511
0 ˆ 选定t 选定t个独立参数 X 近似值取为 X ,有
2 1 1 ˆ L1 = X 1 = + L1 − L2 − L3 + 60 3 3 3 ∧ 1 2 1 ˆ L 2 = X 2 = − L1 + L2 − L3 + 60 3 3 3 ∧ 1 1 2 L 3 = − L1 − L2 + L3 + 60 观测值 3 3 3