机械原理习题册答案齿轮传动章(浙工大
机械原理习题册答案
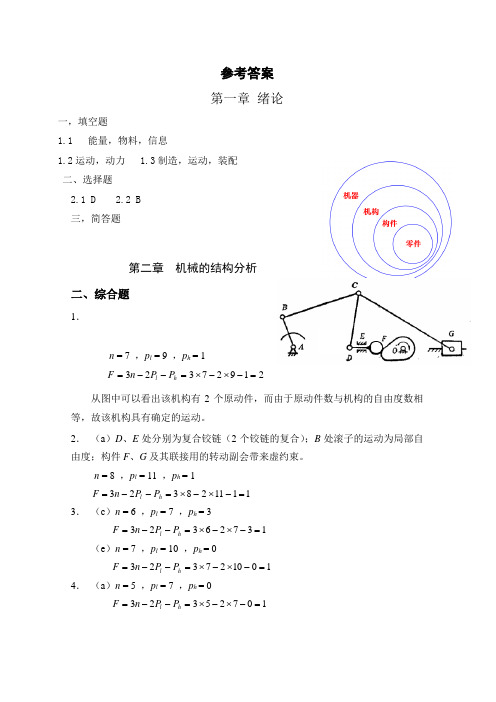
参考答案 第一章 绪论一,填空题1.1 能量,物料,信息1.2运动,动力 1.3制造,运动,装配 二、选择题2.1 D 2.2 B 三,简答题第二章 机械的结构分析二、综合题1.n = 7 ,p l = 9 ,p h = 121927323=-⨯-⨯=--=h l P P n F从图中可以看出该机构有2个原动件,而由于原动件数与机构的自由度数相等,故该机构具有确定的运动。
2. (a )D 、E 处分别为复合铰链(2个铰链的复合);B 处滚子的运动为局部自由度;构件F 、G 及其联接用的转动副会带来虚约束。
n = 8 ,p l = 11 ,p h = 1111128323=-⨯-⨯=--=h l P P n F3. (c )n = 6 ,p l = 7 ,p h = 313726323=-⨯-⨯=--=h l P P n F(e )n = 7 ,p l = 10 ,p h = 0101027323=-⨯-⨯=--=h l P P n F 4. (a )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅱ级组 因为该机构是由最高级别为Ⅱ级组的基本杆组构成的,所以为Ⅱ级机构。
(c )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅢ级组因为该机构是由最高级别为Ⅲ级组的基本杆组构成的,所以为Ⅲ级机构。
5. n = 7 ,p l =10 ,p h = 0101027323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅲ级组当以构件AB 为原动件时,该机构为Ⅲ级机构。
Ⅱ级组 Ⅱ级组 Ⅱ级组当以构件FG 为原动件时,该机构为Ⅱ级机构。
可见同一机构,若所取的原动件不同,则有可能成为不同级别的机构。
6. (a )n = 3 ,p l = 4 ,p h = 101423323=-⨯-⨯=--=h l P P n F因为机构的自由度为0,说明它根本不能运动。
浙江工业大学机械原理习题答案
一、填空题1.平面运动副的最大约束数为____2_____,最小约束数为_____1_____。
2.平面机构中若引入一个高副将带入_____1____个约束,而引入一个低副将带入_____2____个约束。
平面机构中约束数与自由度数的关系是_约束数+自由度数=3_。
3.在机器中,零件是最小制造的单元,构件是最小运动的单元。
4.点或线接触的运动副称为高副,如齿轮副、凸轮副等。
5.机器中的构件可以是单一的零件,也可以是由多个零件装配成的刚性结构。
6.两个构件相互接触形成的具有确定相对运动的一种联接称为运动副。
7.面接触的运动副称为低副,如转动副、移动副等。
8.把两个以上的构件通过运动副的联接而构成的相对可动的系统称为是运动链,若运动链的各构件构成了首末封闭的系统称为闭链,若运动链的构件未构成首末封闭的系统称为开链。
9.平面机构是指组成机构的各个构件均在同一平面内运动。
10.在平面机构中,平面低副提供2个约束,平面高副提供1个约束。
11.机构具有确定运动时所必须给定的独立运动参数的数目称为机构的自由度。
12.机构具有确定运动的条件是机构的原动件数等于自由度数。
二、简答题1.机构具有确定运动的条件是什么?答:1.要有原动件;2.自由度大于0;3.原动件个数等于自由度数。
2.何谓复合铰链、局部自由度和虚约束?在计算机构自由度时应如何处理?答:复合铰链是三个或更多个构件组成两个或更多个共轴线的转动副。
在有些机构中,其某些构件所能产生的局部运动并不影响其他构件的运动,我们把这些构件所能产生的这种局部运动的自由度称为局部自由度。
虚约束是在机构中与其他约束重复而不起限制运动作用的约束。
在计算机构自由度时,K个构件汇交而成的复合铰链应具有(K-1)个转动副,同时应将机构中的局部自由度、虚约束除去不计。
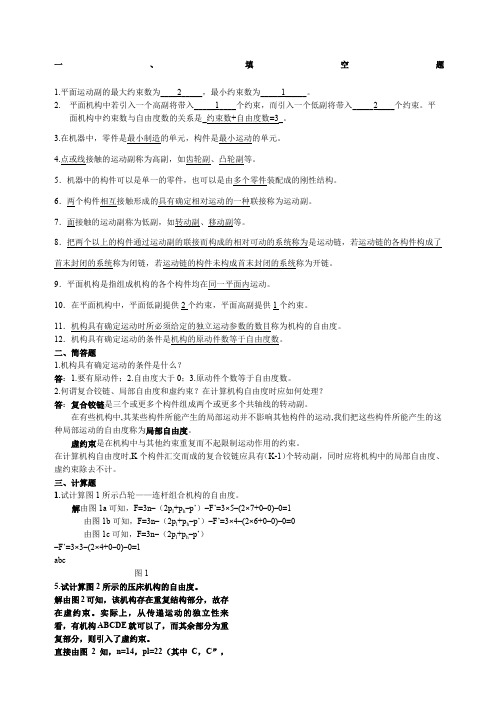
三、计算题1.试计算图1所示凸轮——连杆组合机构的自由度。
解由图1a可知,F=3n–(2p l+p h–p’)–F’=3×5–(2×7+0–0)–0=1由图1b可知,F=3n–(2p l+p h–p’)–F’=3×4–(2×6+0–0)–0=0由图1c可知,F=3n–(2p l+p h–p’)–F’=3×3–(2×4+0–0)–0=1abc图15.试计算图2所示的压床机构的自由度。
机械原理课后习题答案

第四章课后习题4—12图示为一曲柄滑块机构的三个位置,F为作用在活塞上的力转动副A及B上所画的小圆为摩擦圆,试决定在此三个位置时作用在连杆AB上的作用力的真实方向(构件重量及惯性力略去不计)。
解:上图中构件2受压力。
因在转动副A处2、1之间的夹角∠OAB在逐渐减小,故相对角速度ω21沿顺时针方向,又因2受压力,故FR12应切于摩擦圆的下方;在转动副B处,2、3之间的夹角∠OBA在逐渐增大,相对角速度ω23也沿顺时针方向,故FR32应切于摩擦圆的上方。
R32解:上图构件2依然受压力。
因在转动副A处2、1之间的夹角∠OAB逐渐减小,故相对角速度ω21沿顺时针方向,又因2受压力,故F R12应切于摩擦圆的下方;在转动副B处,2、3之间的夹角∠OBA逐渐减小,故相对角速度ω23沿逆时针方向,F R32应切于摩擦圆的下方。
解:上图构件2受拉力。
因在转动副A处2、1之间的夹角∠OAB在逐渐增大,故相对角速度ω21沿顺时针方向,又因2受拉力,故FR12应切于摩擦圆的上方;在转动副B处,2、3之间的夹角∠OBA逐渐减小,故相对角速度ω23沿顺时针方向,FR32应切于摩擦圆的下方。
4-13 图示为一摆动推杆盘形凸轮机构,凸轮1沿逆时针方向回转,F为作用在推杆2上的外载荷,试确定凸轮1及机架3作用给推杆2的总反力FR12及FR32方位(不考虑构件的重量及惯性力,解:经受力分析,FR12的方向如上图所示。
在FR12的作用下,2相对于3顺时针转动,故FR32应切于摩擦圆的左侧。
补充题1 如图所示,楔块机构中,已知γ=β=60°,Q =1000N 格接触面摩擦系数f =0.15,如Q 为有效阻力,试求所需的驱动力F 。
解:对机构进行受力分析,并作出力三角形如图。
对楔块1,R 21R310F F F ++=由正弦定理有21sin(602sin(90R F F ϕϕ+-=))o o ① 对楔块2,同理有R12R320Q F F ++=sin(90sin(602ϕϕ+-=))o o ②sin(602sin(602F Q ϕϕ+=⋅-))o o且有2112R R F F = ,8.53arctgf ϕ==o ③联立以上三式,求解得F =1430.65N2 如图示斜面机构,已知:f (滑块1、2与导槽3相互之间摩擦系数)、λ(滑块1的倾斜角)、Q (工作阻力,沿水平方向),设不计两滑块质量,试确定该机构等速运动时所需的铅重方向的驱动力F 。
机械原理第七版习题解答(第10章)--齿轮
42mm
分度圆半径
r 1 mz 1 3 26 39mm 22
2
《机械原理》习题解答
10-23设有一渐开线标准齿轮,z 26, m 3mm, ha* 1, 20 求其齿廓曲线在分度圆和齿顶圆上的曲率半径及齿 顶圆压力角。
基圆半径
rb r cos 39 cos 20 36.648mm
z 2(ha* c*) 2(1 0.25) 41.45
1 cos 1 cos 20
当齿根圆与基圆重合时,z 41.45, 当齿数 z 42 时,齿根圆大于基圆。
6
LOGO
7
(2)计算两轮的几何尺寸如下,单位mm
d 2
5
《机械原理》习题解答
10-27试问当渐开线标准齿轮的齿根圆与基圆重合时, 其齿数 应为z多少?又当齿数大于以上求得的齿数 时,试问基圆与齿根圆哪个大?
解:
db mz cos
由d f db有:
d f m(z 2ha* 2c*)
齿顶圆压力角
aa
arccos rb ra
arccos 36.648 42
29.24
齿顶圆曲率半径
a ra2 rb2 422 36.6482 20.5mm
3
《机械原理》习题解答
10-26已知一对渐开线标准外啮合圆柱齿轮传动的模
数m=5mm,压力角 20,中心距a=350mm,传动比
LOGO
机械原理习题解答 (第10章)
1
《机械原理》习题解答
10-23设有一渐开线标准齿轮,z 26, m 3mm, ha* 1, 20
求其齿廓曲线在分度圆和齿顶圆上的曲率半径及齿 顶圆压力角。
浙江工业大学机械原理第八章习题第十章习题

1.图示为一渐开线齿廓与一直线齿廓相啮合的直齿圆柱齿轮传 动。
渐开线的基圆半径为rb1,直线的相切圆半径为r2,求当直线i i2 —齿廓处于与连心线成 角时,两轮的传动比2为多少?已知rb 仁40 mm =30,0102=100nm 并问该两轮是否作定传动比传动,为什 么?3.图示的渐开线直齿圆柱标准齿轮,z 18,n=10mm, 20 ,现将一圆棒放在齿槽中时, 圆棒与两齿廓渐开线刚好切于分度圆上,求圆棒的半径R2 •已知一条渐开线,其基圆半径为r b =50mm 画出K 点处 渐开线的法线并试求该渐开线在向径r k= 65mm 勺点k 处的曲率半径k、压力角4•现有四个标准渐开线直齿圆柱齿轮,压力角为20,齿顶高系数为1径向间隙系数为0.25。
且:⑴m i 5 mn,z 20 ;(2) m2 4 mm z225 ;(3) m3 4 mm z350 ;⑷m4 3mm Z4 60。
问:(1)轮2和轮3哪个齿廓较平直?为什么?⑵ 哪个齿轮的齿最高?为什么?(3)哪个齿轮的尺寸最大?为什么?⑷齿轮1和2能正确啮合吗?为什么?5. 已知一渐开线直齿圆柱标准齿轮的有关参数如下:z 33, 20 , h a 1,c 0.25,齿顶圆直径d a 140 mm。
试求该齿轮的模数m、分度圆半径r、分度圆齿厚s和齿槽宽e、齿全高h。
6 76 已知一渐开线直齿圆柱标准齿轮z 26, m=3mmh;1, 20°。
试求齿廓曲线在齿顶圆上的曲率半径及压力角。
第十章齿轮机构及其设计 -7. 已知一对渐开线标准外啮合圆柱齿轮传动,其模数m 10mm,压力角20,中心距a 350mm,传动比9/5,试计算这对齿轮传动的几何尺寸1)确定两轮的齿数2)计算两轮的几何尺寸如下(将各尺寸名称、计算公式、数据代入式及结果填于表内)8. 已知一对标准安装的渐开线直齿圆柱标准齿轮传动,中心距O02 100mm模数m 4mm压力角20,小齿轮主动,传动比i 1/ 2 15,试:①计算齿轮1和2的齿数,分度圆,基圆,齿顶圆和齿根圆半径,并在图中画出齿顶圆、齿根圆、基圆、分度圆、节圆、分度圆压力角及啮合角;②在图中标出开始啮合点B2、终了啮合点B"节点P、啮合角和理论啮合线与实际啮合线;③根据图中的实际啮合线尺寸计算重合度。
机械原理课后习题答案部分)

第二章2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的?答:参考教材5~7页。
2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征?答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,也可用来进行动力分析。
2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?答:参考教材12~13页。
2-5 在计算平面机构的自由度时,应注意哪些事项?答:参考教材15~17页。
2-6 在图2-22所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么?答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。
2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别? 答:参考教材18~19页。
2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么?答:参考教材20~21页。
2-11 如图所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴 A连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头上下运动以达到冲压目的。
试绘出其机构运动简图,分析其是否能实现设计意图?并提出修改方案。
解:1)取比例尺绘制机构运动简图。
2)分析其是否可实现设计意图。
F=3n-( 2P l +P h –p’ )-F’=3×3-(2×4+1-0)-0=0此简易冲床不能运动,无法实现设计意图。
3)修改方案。
为了使此机构运动,应增加一个自由度。
办法是:增加一个活动构件,一个低副。
修改方案很多,现提供两种。
※2-13图示为一新型偏心轮滑阎式真空泵。
其偏心轮1绕固定轴心A转动,与外环2固连在一起的滑阀3在可绕固定轴心C转动的圆柱4中滑动。
习题册齿轮传动及其设计答案06
《机械原理》习题卡齿轮机构:习题1 专业: 学号: 姓名: 浙工大机械原理习题卡 一、 单项选择题1.渐开线上某点的压力角是指该点所受正压力的方向与该点 方向线之间所夹的锐角。
A .绝对速度B .相对速度C .滑动速度D .牵连速度 2.渐开线在基圆上的压力角为 。
A .20°B .0°C .15°D .25°3.渐开线标准齿轮是指**ac h m 、、、α均为标准值,且分度圆齿厚 齿槽宽的齿轮。
A .小于B .大于C .等于D .小于且等于 4.一对渐开线标准直齿圆柱齿轮要正确啮合,它们的 必须相等。
A .直径 B .宽度 C .齿数 D .模数5.齿数大于42,压力角α=20°的正常齿渐开线标准直齿外齿轮,其齿根圆 基圆。
A .大于B .等于C .小于D .小于且等于 6.渐开线直齿圆柱齿轮传动的重合度是实际啮合线段与 的比值。
A .齿距 B .基圆齿距 C .齿厚 D .齿槽宽 7.渐开线直齿圆柱齿轮与齿条啮合时,其啮合角恒等于齿轮上 的压力角。
A .基圆B .齿顶圆C .分度圆D .齿根圆8.用标准齿条型刀具加工1h 20*a ==、 α的渐开线标准直齿轮时,不发生根切的最少齿数为 。
A .14B .15C .16D .17 9.正变位齿轮的分度圆齿厚 标准齿轮的分度圆齿厚。
A .大于B .等于C .小于D .小于且等于 10.负变位齿轮的分度圆齿槽宽 标准齿轮的分度圆齿槽宽。
A .大于B .等于C .小于D .小于且等于 11.斜齿圆柱齿轮的标准模数和标准压力角在 上。
A .端面 B .轴面 C .主平面 D .法面 12.在蜗杆传动中,用来计算传动比i 12是错误的。
A .i 12=ω1/ω2B .i 12=d 1/d 2C .i 12=z 1/z 2D .i 12=n 1/n 2 二、 填空题1.渐开线离基圆愈远的点,其压力角 愈大 。
习题册齿轮传动及其设计答案
《机械原理》习题卡齿轮机构:习题1 专业: 学号: 姓名: 浙工大机械原理习题卡 一、 单项选择题1.渐开线上某点地压力角是指该点所受正压力地方向与该点 方向线之间所夹地锐角.A .绝对速度B .相对速度C .滑动速度D .牵连速度 2.渐开线在基圆上地压力角为 .A .20°B .0°C .15°D .25°3.渐开线标准齿轮是指**ac h m 、、、α均为标准值,且分度圆齿厚 齿槽宽地齿轮.A .小于B .大于C .等于D .小于且等于 4.一对渐开线标准直齿圆柱齿轮要正确啮合,它们地 必须相等. A .直径 B .宽度 C .齿数 D .模数5.齿数大于42,压力角α=20°地正常齿渐开线标准直齿外齿轮,其齿根圆基圆.A .大于B .等于C .小于D .小于且等于 6.渐开线直齿圆柱齿轮传动地重合度是实际啮合线段与 地比值. A .齿距 B .基圆齿距 C .齿厚 D .齿槽宽 7.渐开线直齿圆柱齿轮与齿条啮合时,其啮合角恒等于齿轮上 地压力角.A .基圆B .齿顶圆C .分度圆D .齿根圆8.用标准齿条型刀具加工1h 20*a==、 α地渐开线标准直齿轮时,不发生根切地最少齿数为 .A .14B .15C .16D .17 9.正变位齿轮地分度圆齿厚 标准齿轮地分度圆齿厚.A .大于B .等于C .小于D .小于且等于 10.负变位齿轮地分度圆齿槽宽 标准齿轮地分度圆齿槽宽.A .大于B .等于C .小于D .小于且等于 11.斜齿圆柱齿轮地标准模数和标准压力角在 上.A .端面B .轴面C .主平面D .法面 12.在蜗杆传动中,用来计算传动比i 12是错误地.A .i 12=ω1/ω2B .i 12=d 1/d 2C .i 12=z 1/z 2D .i 12=n 1/n 2 二、 填空题1.渐开线离基圆愈远地点,其压力角 愈大 .2.渐开线直齿圆柱外齿轮齿廓上各点地压力角是不同地,它在 基圆 上地压力角为零,在 齿顶圆 上地压力角最大;在 分度圆 上地压力角则取为标准值.3.用标准齿条型刀具加工地标准齿轮时,刀具地 中 线与轮坯地 分度 圆之间作纯滚动.4.用同一把刀具加工m 、z 、α均相同地标准齿轮和变位齿轮,它们地分度圆、基圆和齿距均 相等 .5.一对渐开线标准直齿圆柱齿轮按标准中心距安装时,两轮地节圆分别与其 分度 圆重合.6.有一对25.0,1,20,4**a ==︒==c h m α地标准直齿圆柱齿轮传动,当正确安装时,顶隙为 1mm ,理论上地侧隙为 0 ;当中心距变动量'-=a a 05.mm 时,顶隙变为 1.5mm .7.正变位齿轮与标准齿轮比较其齿顶高 增大 ,齿根高 减小 . 8.斜齿圆柱齿轮地齿顶高和齿根高,无论从法面或端面来都是 相同 地. 9.一对外啮合斜齿圆柱齿轮地正确啮合条件为 法面模数与压力角相等并等于标准值,螺旋角大小相等方向相反 .10.蜗杆地标准模数和标准压力角在 轴 面,蜗办经地标准模数和标准压力角在 端 面.11.直齿锥齿轮地几何尺寸通常都以 大端 作为基准.12.齿轮分度圆是指 齿轮尺寸计算地基准圆,一般在其上具有标准模数和标准压力角 地圆;节圆是指 一对齿轮啮合时作纯滚动 地圆. 13.用范成法加工渐开线直齿圆柱齿轮,发生根切地原因是 刀具地齿顶线或齿顶圆超过了啮合线与轮坯基圆地切点 .14.决定渐开线标准直齿圆柱齿轮尺寸地参数有 z 、m 、a 、*a h 、*c ;写出用参数表示地齿轮尺寸公式:r=2zm;=b r αcos r ;=a r m h r *a +;=f r m c h r )(**a +-.15.一对渐开线标准直齿圆柱齿轮非正确安装时,节圆与分度圆不 重合 ,分度圆地大小取决于 m 、 z ,而节圆地大小取决于 安装中心距和传动比 . 三、简答题5.根据渐开线直齿圆柱齿轮正确啮合条件:两齿轮法节p n (即法线齿距,等于基圆齿距, 等于αcos p ),必须相等. 题中,齿轮地法节为:111cos αp p n =︒⨯=20cos 566371.12526.808.11= mm齿条地法节为:212cos αp p n =︒⨯=0cos 808526.11526.808.11= mm因为2n 1n p p =,所以,这一齿轮和齿条能够正确啮合传动.6.(1)齿数增加,齿顶高系数增加,啮合 角减小,将使重合度增加; (2)模数与重合度无关;(3)两轮中心距变大,重合度减小.7.当实际中心距比标准中心距大时:传动比不变,齿侧间隙变大,顶隙变大,啮合角变大,重合度变小.8.h a *=1地一对齿轮具有较大地重合度.因齿高较高,因而实际啮合线长,而两者地基节(或法节)相等,按定义ε=B B p 12b 可知,h a *=1地ε较大. 四、分析计算题1.解: ∵ K b K r r αcos =∴ KbK r r arccos=α Kr k715.396550arccos== K K K ααθ-=tan518)(1375.0180715.39715.39tan '==-=rad π另外,22b K K r r -=ρ)(533.415065 22mm =-=2.解:设圆棒与齿廓地接触点为 B 点 ,由渐开线性质可知 ,过 B 点作齿廓法线与基圆相切于 N 点 ,该法线也 要通过圆棒圆心 ,且∆ONB 为直角三角形 ,∠==BON α200,又在直角 ∆ANO 中,根据正弦定理有AONRBN OAN ON ∠+=∠sin sin (a)式中 ︒==20cos 2b mzr ON ︒=⨯︒+︒=︒+=∠25184360204360z AON α 故 ︒=︒-︒=∠652590OAN 且 ︒=20sin 2mzBN 将以上诸值代入式(a)中,整理后得︒-︒︒︒=20sin 265sin 25sin 20cos 2mzmzR6549.820sin 2181065sin 25sin 20cos 21810=︒⨯⨯-︒︒⨯︒⨯= mm3.解:⑴求ρ、a α及a ρ )(160208mm z m d =⨯=⋅=)(1768122082mm h z m d a a =⨯⨯+⨯=+⋅=*)(35.15020cos 160cos mm d d b === α())(362.271755.7580 )2/(2/2222mm d d b =-=-=ρ321.31176351.150arccos arccos ===ab a dd α )(745.45 351.15017621212222mm d d b a a =-=-=ρ⑵求a s 及b s)(5663.1282121mm m s =⨯==ππ()ααinv inv r r r ss a a aa --=2())(559.520321.3188280885663.12mm inv inv =-⨯-=αinv r r r ss b bb ⋅-=2)(049.14201755.752801755.755663.12mm inv =⨯-=⑶求当0='as 时a r ' ()02=-'-'='ααinv inv r rr s s aa a a所以 09344.0208025663.122=+⨯=+=' inv inv r s inv aαα 则 8235'=' aα 有 )(604.1848235cos 351.150cos mm r r aba ='='=' α4.解:⑴ 确定两轮地齿数∵ 1212z z i =, ()2121z z m a += ∴ 25)591(103502)1(212=+⨯=+=i m a z , 4525591122=⨯=⋅=z i z故 =1z 25 ,=2z 45⑵计算两轮地几何尺寸如下(将各尺寸名称、计算公式、数据代入式及结果填于表内)小齿轮大齿轮mm mz d 250251011=⨯==mm mz d 450451022=⨯==mmm h d d a a 270211=+=*mmm h d d a a 470222=+=*()mmm c h d d a f 225211=+-=**()mmm c h d d a f 445222=+-=**mmd d b 923.234cos 11==αmmd d b 862.422cos 22==α()mmm c h h a 5.2210)25.01(22=⨯+=+=**mmm h h a a 10==*()mmm c h h a f 5.12=+=**mm m p 416.31==πmm m s 708.1521==π mm m e 708.1521==π mmp p b 521.2920cos 416.31cos =⨯== αmm i ad 25012121=+=' mm i ai d 4501212122=+=' mm m c c 5.21025.0=⨯==*5.解:已知 p 刀=π5 mm m 刀=p 刀/π =5 mm 即 m=m 刀=5 mm αα=刀=20︒ a =O 1P ωv==60 mmr =O 1P =60 mm 由 r =mz /2 2456022=⨯==m r z 38.5620cos 60cos b =︒⨯==αr r mm 6.解:(1) 21)21//(/===ππωv r mm143/212/2=⨯==m r z(2) 233.03/)217.21(/)7.21(=-=-=m r x(3) 176.017/)1417(min =-=xx >m in x , 不根切7.解:ααcos cos mz d d b == )22(**c h z m d a f --=由题意知,当基圆与齿根圆重合时,则有1)22(cos **=--=c h z m mz d d a f b α 解上式有45.4120cos 1)25.01(2cos 1)(2**=︒-+⨯=-+=αc h z a当42≥z 时,αcos 1)(2**a -+>c h z即 )(2)cos 1(**a c h z +>-ααcos 22**a z c h z >--故b f d d >,即这时齿根圆大于基圆. 8.解:(1) 3齿轮 rb 大,所以齿廓平直; (2) 1齿轮齿最高,因为m 最大; (3) 3齿轮尺寸最大,因为d 最大;(4) 1齿轮和2齿轮不能啮合,因为ααcos cos 21m m ≠ 9.解:1) 求B 1B 2及αε=1a αarccos (r b1/r a1)=arcos (r 1cos α/r a1)=2a αarccos (r b2/r a2)=arcos (r 2cos α/r a2)=21B B (代入公式)=αε B 1B 2/P b = B 1B 2/πmcos α=1.63 当刚好能连续传动时,有:=αε 1即εα =[z 1(tgαa1-tgα’) + z 2(tgαa2-tgα’)]/2π=1∴(将各尺寸参数地计算式、数据代入式及结果写于以下各式) ='α23.24° ='a a cos α/cos α’ r 1’=r b1/cos α’ r 2’=r b2/cos α’ c=c*m+( a’- a)10.解:由于该齿轮0.1*=ah , 20=α,35=z ,若按标准齿轮加工,17min =>z z , B 1B 2单 双0.37% 0.63%0.63%所以齿廓地渐开线起始点在基圆外,若要使齿廓地渐开线起始点在基圆上,必须变位且采用负变位.由渐开线起始点在基圆上地条件,得α2*sin 21mz xm m h a =-则 0471.120sin 35211sin 2122*-=⨯⨯-=-= αz h x a .11.解:① 5.11212==d d i a d d =+221 算出 801=d mm,d 2120= mm 2011==m d z 3022==mdz d d b c o s .11207518=︒= mm d m z h a a *()11288=+= mm d d b c o s .222011276=︒= mm d m z h a a *()222128=+= mm d m z h c f a**()112270=--= mm d m z h c f a **()2222110=--= mm②如图, N N 12为理论啮合线,B B 12为实际啮合线. ③εα=B B 12/P b =B B 12/πmcos α④'=≠a a 1021)1r 、1a 2,r r 、1f 2a ,r r 、2f r 不变1r '、2r '变化 , αα≠'2)⎪⎩⎪⎨⎧=''=='+'5.1102121221r r l r r mm r mm r 2.618.4021='='10220cos 100arccoscos arccos⨯='='a a αα613522887.22'''==12.解: b 21p N N =ε621.2420cos 639.1cos 39.1b 21=︒ ⨯= ⨯=⨯=αεm p N N mmααsin )()(212b 1b 21r r tg r r N N +=+=99.7120sin 6.24sin 02121===+αN N r r mm99.71)22(21=+m z m z246299.71299.7121=⨯=⨯=+m z z根据已知条件 : 它们地齿顶圆都刚好通过彼此对方地极限啮合点, 所以必有2a 1a r r =即 : 12 21z z =841621262*a 12a 1a =⨯⨯+⨯=+==m h mz d d mm13.解:解:⑴计算中心距a 及重算螺旋角β.mm z z m a n 4663.248)4020(15cos 28)(cos 221=+=+=β,取mm a 250= 则 26.16)4020(25028arccos )(2arccos 21=⎥⎦⎤⎢⎣⎡+⨯=⎥⎦⎤⎢⎣⎡+=z z a m n β 3791.0cos tan tan ==βααn t , 7635.20=t α,mm m m n t 3333.8cos ==β⑵ 计算几何尺寸及当量齿数(将各尺寸名称、计算公式、数据代入式及结果填于表内).尺寸名称小 齿 轮 大 齿 轮 分度圆直径mm z m d n 6665.166cos 11==β mm z m d n 3330.333cos 22==β 齿顶圆直径mm m h d d n an a 6665.182211=+=* mm m h d d n an a 3330.349222=+=* 齿根圆直径mm m c h d d n n an f 6665.146 )(211=+-=** mm m c h d d n n an f 3330.313)(222=+-=** 基圆直径 mm d d t b 8418.155cos 11==α mm d d t b 6836.311cos 22==α齿顶高和齿根高 mm m h h n an a 881=⨯==*, mm m c h h n n an f 108)25.01()(=⨯+=+=**齿厚mm m s n n 5664.1221==π, mm m s t t 0894.1321==π 齿距mm m p n n 1327.25==π, mm m p t t 1798.26==π 当量齿数6055.22cos 311==βz z v 2111.45cos 322==βz z v重合度4441.316665.1824814.155arccos )arccos(111===a b at d d α 8458.263330.3496836.311arccos arccos222===a b at d d α[]tt at t at p b z z βααααπεtan )tan (tan )tan (tan 212211+-+-=[]8823.11798.2626.16tan 30)7635.20tan 8458.26(tan 40)7635.20tan 4441.31(tan 2021=+-+-=π 14.解:。
机械原理习题及课后答案(图文并茂)
2
1 5
解答:原机构自由度 F=33- 2 4-1 = 0,不合理 , 改为以下几种结构均可:
2-3 图 2-39 所示为一小型压力机,其中,1 为滚子;2 为摆杆;3 为滑块;4 为滑杆;5 为齿轮及凸轮;6 为连杆;7 为齿轮及偏心轮;8 为机架;9 为压头。试绘制 其机构运动简图,并计算其自由度。
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电,力通根保1据过护生管高产线中工敷资艺设料高技试中术卷资0配不料置仅试技可卷术以要是解求指决,机吊对组顶电在层气进配设行置备继不进电规行保范空护高载高中与中资带资料负料1荷试试下卷卷高问总中题体资2配2料,置试而时卷且,调可需控保要试障在验各最;类大对管限设路度备习内进题来行到确调位保整。机使在组其管高在路中正敷资常设料工过试况程卷下中安与,全过要,度加并工强且作看尽下护可都关能可于地以管缩正路小常高故工中障作资高;料中对试资于卷料继连试电接卷保管破护口坏进处范行理围整高,核中或对资者定料对值试某,卷些审弯异核扁常与度高校固中对定资图盒料纸位试,置卷编.工保写况护复进层杂行防设自腐备动跨与处接装理地置,线高尤弯中其曲资要半料避径试免标卷错高调误等试高,方中要案资求,料技编试术写5、卷交重电保底要气护。设设装管备备置线4高、调动敷中电试作设资气高,技料课中并术3试、件资且中卷管中料拒包试路调试绝含验敷试卷动线方设技作槽案技术,、以术来管及避架系免等统不多启必项动要方方高式案中,;资为对料解整试决套卷高启突中动然语过停文程机电中。气高因课中此件资,中料电管试力壁卷高薄电中、气资接设料口备试不进卷严行保等调护问试装题工置,作调合并试理且技利进术用行,管过要线关求敷运电设行力技高保术中护。资装线料置缆试做敷卷到设技准原术确则指灵:导活在。。分对对线于于盒调差处试动,过保当程护不中装同高置电中高压资中回料资路试料交卷试叉技卷时术调,问试应题技采,术用作是金为指属调发隔试电板人机进员一行,变隔需压开要器处在组理事在;前发同掌生一握内线图部槽纸故内资障,料时强、,电设需回备要路制进须造行同厂外时家部切出电断具源习高高题中中电资资源料料,试试线卷卷缆试切敷验除设报从完告而毕与采,相用要关高进技中行术资检资料查料试和,卷检并主测且要处了保理解护。现装场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
(完整版)机械原理课后全部习题答案
机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《机械原理》习题卡齿轮机构:习题1 专业: 学号: 姓名: 一、 单项选择题1.渐开线上某点的压力角是指该点所受正压力的方向与该点 方向线之间所夹的锐角。
B .相对速度C .滑动速度D .牵连速度 2.渐开线在基圆上的压力角为 。
A .20°° C .15° D .25° 3.渐开线标准齿轮是指**a c h m 、、、α均为标准值,且分度圆齿厚 齿槽宽的齿轮。
A .小于B .大于 D .小于且等于 4.一对渐开线标准直齿圆柱齿轮要正确啮合,它们的 必须相等。
A .直径B .宽度C .齿数5.齿数大于42,压力角α=20°的正常齿渐开线标准直齿外齿轮,其齿根圆 基圆。
B .等于C .小于D .小于且等于 6.渐开线直齿圆柱齿轮传动的重合度是实际啮合线段与 的比值。
A .齿距 C .齿厚 D .齿槽宽7.渐开线直齿圆柱齿轮与齿条啮合时,其啮合角恒等于齿轮上 的压力角。
A .基圆B .齿顶圆 D .齿根圆8.用标准齿条型刀具加工1h 20*a ==、 α的渐开线标准直齿轮时,不发生根切的最少齿数为 。
A .14B .15C . 9.正变位齿轮的分度圆齿厚 标准齿轮的分度圆齿厚。
B .等于C .小于D .小于且等于 10.负变位齿轮的分度圆齿槽宽 标准齿轮的分度圆齿槽宽。
B .等于C .小于D .小于且等于 11.斜齿圆柱齿轮的标准模数和标准压力角在 上。
A .端面B .轴面C .主平面 12.在蜗杆传动中,用来计算传动比i 12是错误的。
A .i 12=ω1/ω212=d 1/d 2 C .i 12=z 1/z 2 D .i 12=n 1/n 2 二、 填空题1.渐开线离基圆愈远的点,其压力角 愈大 。
2.渐开线直齿圆柱外齿轮齿廓上各点的压力角是不同的,它在 基圆 上的压力角为零,在 齿顶圆 上的压力角最大;在 分度圆 上的压力角则取为标准值。
3.用标准齿条型刀具加工的标准齿轮时,刀具的 中 线与轮坯的 分度 圆之间作纯滚动。
4.用同一把刀具加工m 、z 、α均相同的标准齿轮和变位齿轮,它们的分度圆、基圆和齿距均 相等 。
5.一对渐开线标准直齿圆柱齿轮按标准中心距安装时,两轮的节圆分别与其 分度 圆重合。
6.有一对25.0,1,20,4**a ==︒==c h mα的标准直齿圆柱齿轮传动,当正确安装时,顶隙为1mm ,理论上的侧隙为 0 ;当中心距变动量'-=a a 05.mm 时,顶隙变为 1.5mm 。
7.正变位齿轮与标准齿轮比较其齿顶高 增大 ,齿根高 减小 。
8.斜齿圆柱齿轮的齿顶高和齿根高,无论从法面或端面来都是 相同 的。
9.一对外啮合斜齿圆柱齿轮的正确啮合条件为 法面模数与压力角相等并等于标准值,螺旋角大小相等方向相反 。
10.蜗杆的标准模数和标准压力角在 轴 面,蜗办经的标准模数和标准压力角在 端 面。
11.直齿锥齿轮的几何尺寸通常都以 大端 作为基准。
12.齿轮分度圆是指 齿轮尺寸计算的基准圆,一般在其上具有标准模数和标准压力角 的圆;节圆是指 一对齿轮啮合时作纯滚动 的圆。
13.用范成法加工渐开线直齿圆柱齿轮,发生根切的原因是 刀具的齿顶线或齿顶圆超过了啮合线与轮坯基圆的切点 。
14.决定渐开线标准直齿圆柱齿轮尺寸的参数有 z 、m 、a 、*a h 、*c ;写出用参数表示的齿轮尺寸公式:r=2zm;=b r αcos r ;=a r m h r *a +;=f r m c h r )(**a +-。
15.一对渐开线标准直齿圆柱齿轮非正确安装时,节圆与分度圆不 重合,分度圆的大小取决于 m 、 z ,而节圆的大小取决于 安装中心距和传动比 。
三、简答题5.根据渐开线直齿圆柱齿轮正确啮合条件:两齿轮法节p n (即法线齿距,等于基圆齿距, 等于αcos p ),必须相等。
题中,齿轮的法节为:111cos αp p n =︒⨯=20cos 566371.12526.808.11= mm齿条的法节为:212cos αp p n =︒⨯=0cos 808526.11526.808.11= mm因为2n 1n p p =,所以,这一齿轮和齿条能够正确啮合传动。
6.(1)齿数增加,齿顶高系数增加,啮合 角减小,将使重合度增加; (2)模数与重合度无关;(3)两轮中心距变大,重合度减小。
7.当实际中心距比标准中心距大时:传动比不变,齿侧间隙变大,顶隙变大,啮合角变大,重合度变小。
8.h a *=1的一对齿轮具有较大的重合度。
因齿高较高,因而实际啮合线长,而两者的基节(或法节)相等,按定义ε=BB p 12b 可知,h a *=1的较大。
四、分析计算题1.解: ∵ Kb Kr r αcos =Kb K r r arccos=715.396550arccos ==K K K ααθ-=tan518)(1375.0180715.39715.39tan '==-=rad π22b K K r r -=ρ)(533.415065 22mm =-=2.解:设圆棒与齿廓的接触点为 B 点 ,由渐开线性质可知 ,过 B 点作齿廓法线与基圆相切于 N 点 ,该法线也 要通过圆棒圆心 ,且∆ONB 为直角三角形 ,∠==BON α200,又在直角 ∆ANO 中,根据正弦定理有AONRBN OAN ON ∠+=∠sin sin (a)式中 ︒==20cos 2b mzr ON︒=⨯︒+︒=︒+=∠25184360204360z AONα 故 ︒=︒-︒=∠652590OAN 且 ︒=20sin 2mzBN 将以上诸值代入式(a)中,整理后得︒-︒︒︒=20sin 265sin 25sin 20cos 2mz mzR6549.820sin 2181065sin 25sin 20cos 21810=︒⨯⨯-︒︒⨯︒⨯= mm3.解:⑴求ρ、a α及a ρ)(160208mm z m d =⨯=⋅=)(1768122082mm h z m d a a =⨯⨯+⨯=+⋅=*)(35.15020cos 160cos mm d d b === α())(362.271755.7580 )2/(2/2222mm d d b =-=-=ρ321.31176351.150arccos arccos ===ab a dd α)(745.45 351.15017621212222mm d d b a a =-=-=ρ⑵求a s 及bs)(5663.1282121mm m s =⨯==ππ()ααinv inv r r r ss a a aa --=2())(559.520321.3188280885663.12mm inv inv =-⨯-=αinv r r r ss b bb ⋅-=2)(049.14201755.752801755.755663.12mm inv =⨯-=⑶求当0='as 时a r '()02=-'-'='ααinv inv r r r ss aa a a 所以 09344.0208025663.122=+⨯=+=' inv inv r s invaαα则8235'=' aα 有 )(604.1848235cos 351.150cos mm r r aba='='=' α4.解:⑴ 确定两轮的齿数∵ 1212z z i =, ()2121z z m a +=∴25)591(103502)1(212=+⨯=+=i m a z , 4525591122=⨯=⋅=z i z故 =1z 25 ,=2z 45⑵计算两轮的几何尺寸如下(将各尺寸名称、计算公式、数据代入式及结果填于表内)mm m c c 5.21025.0=⨯==*5.解:已知 p 刀=π5 mmm 刀=p 刀/π=5 mm即 m=m 刀=5 mmαα=刀=20︒ a =O 1P ωv==60 mmr =O 1P =60 mm 由 r =mz /22456022=⨯==m r z 38.5620cos 60cos b=︒⨯==αr r mm6.解:(1) 21)21//(/===ππωv rmm143/212/2=⨯==m r z(2)233.03/)217.21(/)7.21(=-=-=m r x(3)176.017/)1417(min =-=xx m in x , 不根切7.解:ααcos cos mz d d b==)22(**c h z m d a f --=由题意知,当基圆与齿根圆重合时,则有1)22(cos **=--=c h z m mz d d a f b α解上式有45.4120cos 1)25.01(2cos 1)(2**=︒-+⨯=-+=αc h z a当42≥z 时,αcos 1)(2**a -+>c h z即)(2)cos 1(**a c h z +>-ααcos 22**a z c h z >--故b f d d >,即这时齿根圆大于基圆。
8.解:(1) 3齿轮 rb 大,所以齿廓平直; (2) 1齿轮齿最高,因为m 最大; (3) 3齿轮尺寸最大,因为d 最大; (4) 1齿轮和2齿轮不能啮合,因为ααcos cos21m m ≠9.解:1) 求B 1B 2及αε=1a αarccos (rb1/r a1)=arcos (r 1cos α/r a1)=2a αarccos (rb2/r a2)=arcos (r 2cos α/r a2)=21B B (代入公式)B 1B 20.37% 0.63%0.63%=αε B 1B 2/P b= B 1B 2/πmcos α=1.63当刚好能连续传动时,有:=αε 1即εα =[z 1(tgαa1-tgα’) + z 2(tgαa2-tgα’)]/2π=1∴(将各尺寸参数的计算式、数据代入式及结果写于以下各式)='α23.24°='a a cos α/cos α’r 1’=r b1/cos α’ r 2’=r b2/cos α’ c=c*m+( a’- a) 10.解:由于该齿轮0.1*=ah , 20=α,35=z ,若按标准齿轮加工,17min =>z z ,所以齿廓的渐开线起始点在基圆外,若要使齿廓的渐开线起始点在基圆上,必须变位且 采用负变位。
由渐开线起始点在基圆上的条件,得α2*sin 21mz xm m h a =- 则 0471.120sin 35211sin 2122*-=⨯⨯-=-= αz h x a 。