基于摄像机自标定的视频对比度能见度检测算法与实现
数字摄像能见度仪的能见度算法设计及实现
2 . S c h o o l o f E l e c t i r c a l a n d I n f o r ma t i o n E n g i n e e in r g, No r t h e r n Un i v e r s i t y f o r Na t i o n a l i t i e s, Yi n c h u a n 7 5 0 0 21, C h i n a)
的误 差 要 求 之 内。 关 键 词 :数 字 摄 像 能 见 度 仪 : 白天 能 见 度 ; 夜 间 能 见 度
中 图 分 类 号 :T P 2 7 4 . 2 文 献 标 识 码 :A 文章 编号 :1 6 7 4 — 7 7 2 0( 2 0 1 3) 0 9 — 0 0 3 5 — 0 3
Vi s i bi l i t y a l g o r i t h m de s i g n a n d i mpl e me n t a t i o n o f d i g i t l a c a me r a v i s i bi l i t y
i n s t r mne n t
ma g e Pr o c e s s i n g a n d Mu l t i me d i a Te c h n ol o g y
数 字摄像 能见度仪 的能见度算 法设计及 实现
常 峰 , 陈晓 婷 , 肖明 霞 一 , 蒋 薇薇 ( 1 . 合 肥 工 业 大 学 计 算 机 与信 息 学 院 , 安徽 合肥 2 3 0 0 0 9 ;
C h a n g F e n g , C h e n Xi a o t i n g , Xi a o Mi n g x i a 一, J i a n g W e i we i
3D16全彩光立方设计

分析Technology AnalysisI G I T C W 技术136DIGITCW2020.040 引言随着互联网的发展,数字化的多媒体内容将占据主流,新型的大屏幕显示设备将代替传统显示屏幕带来新的视觉体验。
3D 光立方大大区别于传统二维显示,能够显示一些复杂立体的图像和动画,画面鲜艳,具有超强立体感。
1 方案设计以前的全彩光立方采用的是74HC573驱动模块,来实现图像的移动,并且功能只是不同的灯珠同时显示不同的颜色,并不能真正实现全彩显示,于是我们采用ILI9341即液晶屏幕驱动模块,控制红绿蓝三个色点的电压,让不同浓度的三色混合,就能形成所需要的各种颜色,可以控制灯珠调节出十余种色彩,做到单个灯珠全彩显示。
2 硬件设计硬件系统模块组成主要包含主控芯片,显示模块,驱动模块以及控制模块。
如图1所示。
图1 设计流程图2.1 主控芯片为了增加芯片运行速度,我们采用stm32芯片,STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARMCortex-M3内核。
32芯片外设口多自身包含多个内置时钟,各个模块之间互不占用,功能强大,提高了运算速度。
2.2 显示模块本作品是16*16*16的光立方,共采用4096个全彩共阴LED 灯珠,大量LED 灯珠聚集在一起间隔仅20mm ,所以能够实现清晰的立体图像显示,增强了3D 视觉效果。
2.3 驱动模块取代了以往的74HC573驱动芯片,我们创新性的采用ILI9341液晶芯片,将每一个灯珠看作一个像素点,把每一层展开,16层变为64*64的点阵,就像显示屏一样。
1L19341支持8/9/16/18位数据总线的MCU 接口,6/16/18位数据总线的RGB 接口,以及3/4线的SPI 接口。
移动图像区域可以通过窗口地址功能在内部GRAMI 来指定。
指定的窗口区域可以选择性地更新,因此,可以在图像区域同时独立地显示移动图像。
通过ILI9341控制每个LED 三个脚的输入电压可以实现多种颜色变换。
基于小波变换的视频能见度检测算法研究与实现

第 1 期
仪
器
仪
表
学
报
、0 . lNO 1 , 3 1 .
21 0 0年 1 月
Ch n s o r a f ce t cI sr me t i e eJ u n l in i n t oS i f u n
Jn 2 0 a . 01
基 于小 波变换 的视 频 能见度 检 测算 法研 究 与实现术
仪 检 测 误差 在 + O l%之 内 ,符合 相 关 国 际及 国家 标 准 。
关键词:小波变换;摄像机 自标定 :能见度检测模型;曲线拟合
中图 分 类号 :T 3 1 1 P9. 4 文 献标 识 码 : A 国 家标 准 学 科 分 类代 码 :506 4 2. 0 0
Vi ov sbi t tc i n a g rt m s d o v ltt a f r a in de ii l ydee to l o ih ba e n wa ee r nso m to i
s s m a e n t ep o o e d l n l o i m a e n u e n Ni g Ch n n e — i i h wa ; e印 一 y t b s d o r p s d mo e d ag r h h s e s d o n — a g a d Zh n L g — y t e h a t b h h
p itta b ln e d e fh re ojc ;hnavs it eet nmo e i ue e te etr a ons t e gt t g s e agt bet te iblyd t i d ls sdt g th a e t o oh e h ot t s ii co o f u t h
能见度检测算法
能见度检测算法一、引言能见度检测是气象监测和交通安全领域中的重要问题。
准确、快速地检测能见度对于预防和应对恶劣天气,以及保障交通安全具有重要意义。
本文介绍了一种基于图像处理的能见度检测算法,该算法主要包括图像预处理、目标检测、深度学习模型、对比度增强、阈值分割、边缘检测、透视线索利用、距离估算、结果输出和误差分析等步骤。
二、图像预处理图像预处理是能见度检测算法的第一步,其目的是消除图像中的噪声和畸变,使图像更适合后续处理。
常见的预处理技术包括灰度化、去噪、平滑等。
这些技术可以有效改善图像质量,提高后续处理的准确性。
三、目标检测在预处理后的图像中,我们需要检测出与能见度相关的目标,如车辆、行人等。
目标检测的目的是确定这些目标的边界框,以便后续处理。
常用的目标检测算法包括基于特征的方法和基于深度学习的方法。
这些算法能够快速准确地检测出目标,为后续处理提供基础数据。
四、深度学习模型深度学习模型是能见度检测算法的核心部分,其目的是根据输入的图像数据预测能见度值。
常用的深度学习模型包括卷积神经网络(CNN)、循环神经网络(RNN)等。
这些模型能够从大量数据中提取有效特征,并自动学习到能见度与图像特征之间的关系。
通过训练模型,我们可以根据输入的图像数据预测出准确的能见度值。
五、对比度增强对比度增强是提高图像清晰度和可辨识度的常用方法。
通过对比度增强,我们可以突出显示图像中的细节信息,提高目标检测和识别的准确性。
常用的对比度增强算法包括直方图均衡化、对比度限制自适应直方图均衡化等。
这些算法能够根据图像内容自适应地调整对比度,使图像更适合后续处理。
六、阈值分割阈值分割是一种简单有效的图像分割方法,其目的是将图像中的前景和背景分离出来。
通过设置合适的阈值,我们可以将图像分割成不同的区域,以便进行后续的目标识别和距离估算。
常用的阈值分割算法包括Otsu算法、迭代阈值法等。
这些算法能够根据图像的灰度直方图自动选择最优的阈值,实现高效的图像分割。
视频能见度检测算法综述

视频能见度检测算法综述苗苗【摘要】Visibility is an important factor to affect aviation, marine, road transport and military activities and so on. Low visibility brings great inconvenience to traffic, or even cause accidents. Therefore, it is of great importance to realize real-time prediction and prewarning of the visibility. In order to improve traditional methods of visibility detection, an analysis and experiment of such technologies as wavelet transform, camera self-calibration, edge feature extraction and curve fitting were made in the paper. Reasonable results were got and these methods were applied in practice. In the paper, these video-based visibility detection methods were discussed, introduced and compared with each other, and finally the development direction and prospect of these methods were elaborated as well.%能见度是影响航空、航海、路上交通以及军事活动等的重要因素,低能见度会对交通等方面造成很大不便,甚至发生事故,因此对能见度的实时预测及预警具有重要意义.为了改善传统能见度检测方法,研究人员对小波变换、摄像机自标定、边缘特征提取、曲线拟合等视频方法进行了研究和试验,得到了比较合理的结果,并且在实践中得以应用.对这些基于视频图像的能见度检测方法进行了讨论、介绍与对比,阐述了该类方法的发展方向及前景.【期刊名称】《现代电子技术》【年(卷),期】2012(035)015【总页数】4页(P72-75)【关键词】能见度;视频分析;散射法;透射法;小波变换【作者】苗苗【作者单位】北方工业大学智能交通系统研究所,北京100144【正文语种】中文【中图分类】TN911.73-340 引言大气能见度作为一个重要的气象观测因素,其预测不仅应用于气象部分的天气分析,更广泛地应用于航空、航海、路上交通、军事及环境监测等领域[1],是影响航空、航海、路上交通以及军事活动等的重要因素之一。
基于摄像机自标定的视频对比度能见度检测算法与实现
稳定性等原因的缺点。其系统已在江苏 1/5 的高速公路上试运行,结果误差符合国际及国家相关标准。
关键词:视频能见度;摄像机自标定;小波变换;对比度;曲线拟合
中图分类号:TP391.41
文献标识码: A
文章编号:1009-5896(2010)12-2907-06
DOI: 10.3724/SP.J.1146.2009.01630
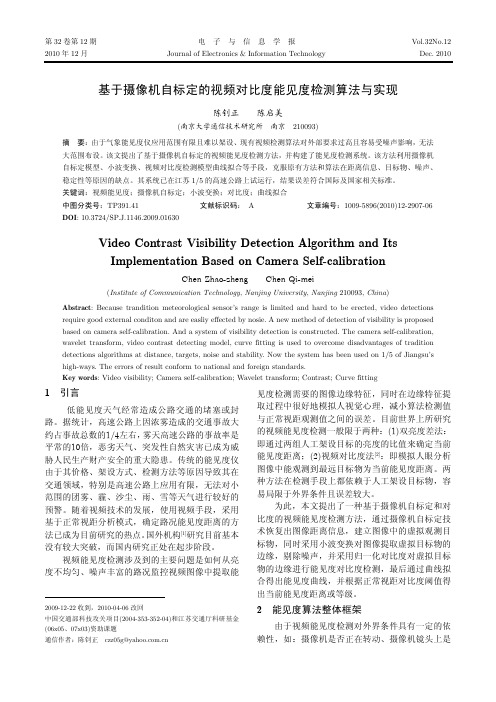
如图1所示为算法流程模块:使用摄像机自标定 技术恢复出图像中的距离信息,建立带有距离信息 的观测目标物,消除图像中冲击噪声的图像预处 理,使用小波变换提取目标物中属于边缘的像素 点,摄像机图像肉眼模拟的边缘特征的提取,根据 所得分析结果与距离映射关系进行曲线拟合,得出 能见度距离。
型参数,以完成车道分割线的像平面重建。模型参
为此,本文提出了一种基于摄像机自标定和对 比度的视频能见度检测方法,通过摄像机自标定技 术恢复出图像距离信息,建立图像中的虚拟观测目 标物,同时采用小波变换对图像提取虚拟目标物的 边缘,剔除噪声,并采用归一化对比度对虚拟目标 物的边缘进行能见度对比度检测,最后通过曲线拟 合得出能见度曲线,并根据正常视距对比度阈值得 出当前能见度距离或等级。
2009-12-22 收到,2010-04-06 改回 中国交通部科技攻关项目(2004-353-352-04)和江苏交通厅科研基金 (06x05、07x03)资助课题 通信作者:陈钊正 czz05g@
2 能见度算法整体框架
由于视频能见度检测对外界条件具有一定的依 赖性,如:摄像机是否正在转动、摄像机镜头上是
图1 能见度检测算法框架
2.1 图像距离、目标物提取 2.1.1 摄像机自标定提取距离信息 文中利用视频采 集设备所采集的视频图像,建立图像坐标至路面坐 标的映射关系,将图像距离信息转换成路面距离信 息。
一种基于摄像头视频图像智能识别能见度的方法[发明专利]
![一种基于摄像头视频图像智能识别能见度的方法[发明专利]](https://img.taocdn.com/s3/m/acc269d9b90d6c85ed3ac6be.png)
专利名称:一种基于摄像头视频图像智能识别能见度的方法专利类型:发明专利
发明人:刘翔,王莹,谢坤伦,伍鸿健
申请号:CN202011581838.6
申请日:20201228
公开号:CN112560790A
公开日:
20210326
专利内容由知识产权出版社提供
摘要:本发明实施例提供的基于摄像头视频图像智能识别能见度的方法中,按照一定的周期获取原始数据,将原始数据按照预设标准划分为多个等级,在每个等级中按照预设比例将原始数据划分为训练集、验证集与测试集,将训练集中的数据输入第一模型进行训练,当第一模型输出数据的等级与测试集之间的等级的差值满足阈值时停止训练并将此时的第一模型进行输出,根据输出的模型对能见度进行识别,对不同的能见度进行识别,加强高速公路严苛环境下的安全管控。
申请人:广州数鹏通科技有限公司
地址:510000 广东省广州市天河区能源路2号节能与环保大楼2栋201-206室(仅限办公)(不可作厂房使用)
国籍:CN
代理机构:广州三环专利商标代理有限公司
更多信息请下载全文后查看。
基于摄像机自标定的视频对比度能见度检测算法与实现

基于摄像机自标定的视频对比度能见度检测算法与实现陈钊正;陈启美
【期刊名称】《电子与信息学报》
【年(卷),期】2010(032)012
【摘要】由于气象能见度仪应用范围有限且难以架设、现有视频检测算法对外部要求过高且容易受噪声影响,无法大范围布设.该文提出了基于摄像机自标定的视频能见度检测方法,并构建了能见度检测系统.该方法利用摄像机自标定模型、小波变换、视频对比度检测模型曲线拟合等手段,克服原有方法和算法在距离信息、目标物、噪声、稳定性等原因的缺点.其系统已在江苏1/5的高速公路上试运行,结果误差符合国际及国家相关标准.
【总页数】6页(P2907-2912)
【作者】陈钊正;陈启美
【作者单位】南京大学通信技术研究所,南京,210093;南京大学通信技术研究所,南京,210093
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.基于路面视亮度差平方最优化的视频能见度检测算法 [J], 吴炜;李勃;杨娴;端金鸣;陈启美
2.无需人工标记的视频对比度道路能见度检测 [J], 李勃;董蓉;陈启美
3.视频能见度检测算法综述 [J], 苗苗
4.基于亮度特征的PTZ视频能见度检测算法及实现 [J], 张潇;李勃;陈启美
5.基于小波变换的视频能见度检测算法研究与实现 [J], 陈钊正;周庆逵;陈启美因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2009-12-22 收到,2010-04-06 改回 中国交通部科技攻关项目(2004-353-352-04)和江苏交通厅科研基金 (06x05、07x03)资助课题 通信作者:陈钊正 czz05g@
2 பைடு நூலகம்见度算法整体框架
由于视频能见度检测对外界条件具有一定的依 赖性,如:摄像机是否正在转动、摄像机镜头上是
视频能见度检测涉及到的主要问题是如何从亮 度不均匀、噪声丰富的路况监控视频图像中提取能
见度检测需要的图像边缘特征,同时在边缘特征提 取过程中很好地模拟人视觉心理,减小算法检测值 与正常视距观测值之间的误差。目前世界上所研究 的视频能见度检测一般限于两种:(1)双亮度差法: 即通过两组人工架设目标的亮度的比值来确定当前 能见度距离;(2)视频对比度法[2]:即模拟人眼分析 图像中能观测到最远目标物为当前能见度距离。两 种方法在检测手段上都依赖于人工架设目标物,容 易局限于外界条件且误差较大。
} −(v0 − vD )uC + (v0 − vC )uD ]⎤⎥⎦ 1/2
f = v0 / tan(t),
l = H / sin t,
tan s
=
− v0 u0
− v1 − u1
p
=
arctan ⎪⎩⎧⎪⎪⎨⎪[(v0
− vD
)uA
− (v0
− vC v0(
)uB + (v0 − vB )uC − (v0 vA − vB + vC − vD )
2908
电子与信息学报
第 32 卷
否有污渍、图像传输质量等等,同时还必须考虑到 摄像机和监控人员共用,所以文中主要考虑在雾天 或低能见度发生情况下,视频监控的紧急等级低于 能见度检测等级,在进行能见度检测时刻点上摄像 机处于静止状态、图像传输质量良好、没有较大污 渍情况下能见度检测。
由于肉眼相对于颜色信息,对亮度信息更加敏 感,所以本文只对亮度进行分析和处理。在已有视 频能见度研究基础上,克服原有研究不足,考虑到 检测算法及其系统可用性和稳定性,首先采用摄像 机自标定技术恢复出图像中的距离信息建立以路面 为背景的虚拟目标物,避免已有检测方法中在道路 两边架设带有距离信息的目标实体;接下来采用小 波变换手法去除噪声对目标物边缘的影响,提取出 属于边缘的像素点,使用符合正常视距的归一化对 比度模型进行目标物特征提取,根据目标物的特征 信息和距离信息进行正常视距能见度曲线拟合,最 后根据所得能见度变换曲线,结合CIE(国际照明委 员会)对比度阈值0.05得出能见度距离。
Video Contrast Visibility Detection Algorithm and Its Implementation Based on Camera Self-calibration
Chen Zhao-zheng Chen Qi-mei
(Institute of Communication Technology, Nanjing University, Nanjing 210093, China)
第 12 期
陈钊正等:基于摄像机自标定的视频对比度能见度检测算法与实现
2909
Yw = ⎡⎣−l cos p(x f sin s + yf cos s) +l sin p sin t(x f coss − yf sin s)⎤⎦ ⎡⎣x f cost sin s + yf cost coss + f sin t⎤⎦ (3)
数估计用霍夫变换:以直线检测为例,直线 y=kx
+c 可以用极坐标参数 ρ 和 θ 描述。它的参数方程为
ρ = x cos θ + y sin θ
(1)
利用 Canny 算子提取全平面的边缘点,得到二 值边缘点图像;接着利用霍夫变换[3]对此二值图像下
半部分进行直线边缘连接,并以共线点个数作为权
重,提取直线中权重较大的两条直线为所需的车道
p
⎫⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎭
(5)
同时选择在尺度a=2,22,23和24下对图像进行处理; (2)在大尺度a=24的尺度空间中选择较高的阈值来 减少噪声的影响;在a=2,22和23的尺度空间中选择较 小的阈值,尽量保持边缘信息的完整性;(3)多尺度 边缘的融合:在相邻尺度下,边缘的位移不会超过
式中(XL,Rcamera,Ycamera)是路面坐标;其中 L、R 表 示摄像机在路左右两侧的情况。 2.1.2 目标物提取 路况能见度重点关注 200 m 以 内,根据上面得出的角点检测结果和距离信息,分 别在 15 m,20 m,50 m,100 m,150 m,200 m, 300 m 等大概位置自动选取形状为平行四边形的虚 拟目标物,此项做法避免在在路侧架设固定目标物 的麻烦,系统可根据具体情况全自动化检测,具体 距离选取系统根据角点检测结果,原则上选取离以 上距离最近的角点,虚拟目标物通过选择的角点由 计算机自动画出,原则是纵向为 5 到 2 个像素点, 而横向为角点到车道边界线。
如图1所示为算法流程模块:使用摄像机自标定 技术恢复出图像中的距离信息,建立带有距离信息 的观测目标物,消除图像中冲击噪声的图像预处 理,使用小波变换提取目标物中属于边缘的像素 点,摄像机图像肉眼模拟的边缘特征的提取,根据 所得分析结果与距离映射关系进行曲线拟合,得出 能见度距离。
型参数,以完成车道分割线的像平面重建。模型参
为此,本文提出了一种基于摄像机自标定和对 比度的视频能见度检测方法,通过摄像机自标定技 术恢复出图像距离信息,建立图像中的虚拟观测目 标物,同时采用小波变换对图像提取虚拟目标物的 边缘,剔除噪声,并采用归一化对比度对虚拟目标 物的边缘进行能见度对比度检测,最后通过曲线拟 合得出能见度曲线,并根据正常视距对比度阈值得 出当前能见度距离或等级。
Abstract: Because trandition meteorological sensor’s range is limited and hard to be erected, video detections require good external conditon and are easliy effected by nosie. A new method of detection of visibility is proposed based on camera self-calibration. And a system of visibility detection is constructed. The camera self-calibration, wavelet transform, video contrast detecting model, curve fitting is used to overcome disadvantages of tradition detections algorithms at distance, targets, noise and stability. Now the system has been used on 1/5 of Jiangsu’s high-ways. The errors of result conform to national and foreign standards. Key words: Video visibility; Camera self-calibration; Wavelet transform; Contrast; Curve fitting
− vA)uD
] sin(t )⎪⎭⎫⎪⎪⎬⎪⎪⎭⎫⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪
(4)
式中(u,v)为图像坐标系,(u0,v0)为由直线xaxd,xbxc决 定的灭点,(u1,v1)为由直线xaxb, xdxc决定灭点,H为 摄像机柱高;
于多个分辨率的边缘算子在对图像进行分析处理, 因此模拟人的视觉心理需要在多尺度下对图像进行 小波处理,具体如下:
稳定性等原因的缺点。其系统已在江苏 1/5 的高速公路上试运行,结果误差符合国际及国家相关标准。
关键词:视频能见度;摄像机自标定;小波变换;对比度;曲线拟合
中图分类号:TP391.41
文献标识码: A
文章编号:1009-5896(2010)12-2907-06
DOI: 10.3724/SP.J.1146.2009.01630
图1 能见度检测算法框架
2.1 图像距离、目标物提取 2.1.1 摄像机自标定提取距离信息 文中利用视频采 集设备所采集的视频图像,建立图像坐标至路面坐 标的映射关系,将图像距离信息转换成路面距离信 息。
(1)车道分割线模型拟合,使用 Canny 边缘检测 算法,提取车道分割线的边缘点,利用建立的像平 面模型,通过逼进算法连接各边缘点,并求出各模
分割线,参见图 2。
图 2 基于 Kluge 模型的车道分割线重建
(2)建立路况摄像机成像模型[4],如图 3 所示, 图中定义了 3 种坐标系,其中地面坐标系 Xw-Yw-Zw 和摄像机坐标系 Xc-Yc-Zc 用来表征 3 维空间;图像 平面坐标系 Xf -Yf 表征成像平面。建立世界坐标系, 其原点为摄像机光轴与地面交点。建立摄像机坐标 系,原点为摄像机光心位置。设摄像机光心与世界 坐标系原点距离为 l,摄像机的俯仰角为 t,偏角为 p,旋角为 s,以地平面上平行线间的区域来对应摄 像机视域内高速公路路面。
用 HARRIS 角点检测算法[5]提取分道线角点信息。 (5)在监控路段上根据分道线角点间平行对应
关系,可解出未知的摄像机参数 p,t,s,f,l,如
(4)利用霍夫变换提取车道线,建立兴趣域,利 式(4)所示:
{ t = −arcsin ⎢⎣⎡v02(vA − vB + vC − vD )⎤⎥⎦
/ ⎡⎣[(v0 − vD )uA − (v0 − vC )uB + (v0 − vB )uC − (v0 − vA)uD ][−(v0 − vB )uA + (v0 − vA)uB