弹塑性力学总结
(完整word版)弹塑性力学总结
弹塑性力学总结弹塑性力学的任务是分析各种结构物或其构件在弹性阶段和塑性阶段的应力和位移,校核它们是否具有所需的强度、刚度和稳定性,并寻求或改进它们的计算方法。
并且弹塑性力学是以后有限元分析、解决具体工程问题的理论基础,这就要求我们掌握其必要的基础知识和具有一定的计算能力。
通过一学期的弹塑性力学的学习,对其内容总结如下:一、弹性力学1、弹性力学的基本假定求解一个弹性力学问题,通常是已知物体的几何形状(即已知物体的边界),弹性常数,物体所受的外力,物体边界上所受的面力,以及边界上所受的约束;需要求解的是物体内部的应力分量、应变分量与位移分量。
求解问题的方法是通过研究物体内部各点的应力与外力所满足的静力平衡关系,位移与应变的几何学关系以及应力与应变的物理学关系,建立一系列的方程组;再建立物体表面上给定面力的边界以及给定位移约束的边界上所给定的边界条件;最后化为求解一组偏分方程的边值问题。
在导出方程时,如果考虑所有各方面的因素,则导出的方程非常复杂,实际上不可能求解。
因此,通常必须按照研究对象的性质,联系求解问题的范围,做出若干基本假定,从而略去一些暂不考虑的因素,使得方程的求解成为可能。
(1)假设物体是连续的。
就是说物体整个体积内,都被组成这种物体的物质填满,不留任何空隙。
这样,物体内的一些物理量,例如:应力、应变、位移等,才可以用坐标的连续函数表示。
(2)假设物体是线弹性的。
就是说当使物体产生变形的外力被除去以后,物体能够完全恢复原来形状,不留任何残余变形。
而且,材料服从虎克定律,应力与应变成正比。
(3)假设物体是均匀的。
就是说整个物体是由同一种质地均匀的材料组成的。
这样,整个物体的所有部分才具有相同的物理性质,因而物体的弹性模量和泊松比才不随位置坐标而变。
(4)假设物体是各向同性的。
也就是物体内每一点各个不同方向的物理性质和机械性质都是相同的。
(5)假设物体的变形是微小的。
即物体受力以后,整个物体所有各点的位移都小于物体的原有尺寸,因而应变和转角都远小于1。
弹塑性力学总结汇编
弹塑性力学总结弹塑性力学的任务是分析各种结构物或其构件在弹性阶段和塑性阶段的应力和位移,校核它们是否具有所需的强度、刚度和稳定性,并寻求或改进它们的计算方法。
并且弹塑性力学是以后有限元分析、解决具体工程问题的理论基础,这就要求我们掌握其必要的基础知识和具有一定的计算能力。
通过一学期的弹塑性力学的学习,对其内容总结如下:一、弹性力学1、弹性力学的基本假定求解一个弹性力学问题,通常是已知物体的几何形状(即已知物体的边界),弹性常数,物体所受的外力,物体边界上所受的面力,以及边界上所受的约束;需要求解的是物体内部的应力分量、应变分量与位移分量。
求解问题的方法是通过研究物体内部各点的应力与外力所满足的静力平衡关系,位移与应变的几何学关系以及应力与应变的物理学关系,建立一系列的方程组;再建立物体表面上给定面力的边界以及给定位移约束的边界上所给定的边界条件;最后化为求解一组偏分方程的边值问题。
在导出方程时,如果考虑所有各方面的因素,则导出的方程非常复杂,实际上不可能求解。
因此,通常必须按照研究对象的性质,联系求解问题的范围,做出若干基本假定,从而略去一些暂不考虑的因素,使得方程的求解成为可能。
(1)假设物体是连续的。
就是说物体整个体积内,都被组成这种物体的物质填满,不留任何空隙。
这样,物体内的一些物理量,例如:应力、应变、位移等,才可以用坐标的连续函数表示。
(2)假设物体是线弹性的。
就是说当使物体产生变形的外力被除去以后,物体能够完全恢复原来形状,不留任何残余变形。
而且,材料服从虎克定律,应力与应变成正比。
(3)假设物体是均匀的。
就是说整个物体是由同一种质地均匀的材料组成的。
这样,整个物体的所有部分才具有相同的物理性质,因而物体的弹性模量和泊松比才不随位置坐标而变。
(4)假设物体是各向同性的。
也就是物体内每一点各个不同方向的物理性质和机械性质都是相同的。
(5)假设物体的变形是微小的。
即物体受力以后,整个物体所有各点的位移都小于物体的原有尺寸,因而应变和转角都远小于1。
弹塑性力学课程总结
应力张量
描绘一点处的应力状态
ij yxx
xy y
xz yz
zx zy z
过一点任意微分面上的应力矢量分量:
px
xl1
yxl2
zxl3
py xyl1 yl2 zyl3
pz
xzl1
yzl2
zl3
pi ijl j Cauchy公式
总应力 正应力
p n
exz eyz ez
(3)体积应变 x y z I1'
2020/11/7
17
基础理论篇 —— 应变状态理论
二、几何方程与应变协调方程
x
u x
,
xy
v x
u y
y
v y
,
yz
w y
v z
z
w z
,
zx
u z
w x
ij
1 2 (ui, j
u j,i )
2 x y 2
2 y x2
m ( x y z ) / 3 —— 平均应力/静水应力
偏斜应力张量 (应力偏量)
Sij
x yx
m
xy y m
xz yz
Sx
Syx
S xy Sy
S xz
S yz
zx
zy
z m Szx Szy Sz
只与剪切变形有关 仅改变形状而不改变其体积
2020/11/7
pn
lim
S 0
Pn S
应力是矢量,与点的位置、通过点的截面的方向有关
pz
pn nn ns
n pn n
n pn s
p2
2 n
py px
在直角坐标系里分解: pn pxi py j pzk
塑性力学总结
塑性力学大报告1、绪论1.1 塑性力学的简介尽管弹塑性理论的研究己有一百多年,但随着电子计算机和各种数值方法的快速发展,对弹塑性本构关系模型的不断深入认识,使得解决复杂应力条件、加载历史和边界条件下的塑性力学问题成为可能。
现在复杂应力条件下塑性本构关系的研究,已成为当务之急。
弹塑性本构模型大都是在整理和分析试验资料的基础上,综合运用弹性、塑性理论建立起来的。
建立弹塑性材料的本构方程时,应尽量反映塑性材料的主要特性。
由于弹塑性变形的现象十分复杂,因此在研究弹塑性本构关系时必须作一些假设。
塑性力学是研究物体发生塑性变形时应力和应变分布规律的学科.是固体力学的一个重要分支。
塑性力学是理论性很强、应用范围很广的一门学科,它既是基础学科又是技术学科。
塑性力学的产生和发展与工程实践的需求是密不可分的,工程中存在的实际问题,如构件上开有小孔,在小孔周边的附近区域会产生“应力集中”现象,导致局部产生塑性变形;又如杆件、薄壳结构的塑性失稳问题,金属的压力加工问题等,均是因为产生塑性变形而超出了弹性力学的范畴,需要用塑性力学理论来解决的问题,另一方面,塑性力学能为更有效的利用材料的强度并节省材料、金属压力加工工艺设计等提供理论依据。
正是这些广泛的工程实际需要,促进了塑性力学的发展。
1.2 塑性力学的发展1913年,Mises提出了屈服准则,同时还提出了类似于Levy的方程;1924年,Hencky采用Mises屈服准则提出另一种理论,用于解决塑性微小变形问题很方便;1926年,Load证实了Levy-Mises应力应变关系在一级近似下是准确的;1930年,Reuss依据Prandtl的观点,考虑弹性应变分量后,将Prandtl所得二维方程式推广到三维方程式;1937年,Nadai研究了材料的加工硬化,建立了大变形的情况下的应力应变关系;1943年,伊柳辛的“微小弹塑性变形理论”问世,由于计算方便,故很受欢迎;1949年,Batdorf和Budiansky从晶体滑移的物理概念出发提出了滑移理论。
2013级--弹塑性力学总结

1.弹塑性力学问题的研究方法:弹塑性力学问题的研究方法可分为三种类型:(1)数学方法:就是用数学分析的工具对弹塑性力学边值问题进行求解,从而得出物体的应力场和位移场等。
在分析弹塑性力学时,对从物体中截取的单元体,从静力平衡、变形几何关系和应力应变物理关系三个方面来建立弹塑性力学的基本方程,由此建立的是偏微分方程,它适用于各种构件或结构的弹性体。
根据基本方程求解各类具体问题。
另一种数学方法是数值方法。
在数值方法中,常见的有差分法、有限元法及边界元法等。
尤其是塑性力学方程是非线性的,因而人们注重应用近似计算方法。
(2)实验方法:就是利用机电方法、光学方法、声学方法等来测定结构部件在外力作用下应力和应变的分布规律,如光弹性法、云纹法等。
(3)实验与数学相结合的方法:这种方法常用于形状非常复杂的弹塑性结构。
例如对结构的特殊部位的应力状态难以确定,可以用光弹性方法测定,作为已知量,置入数值计算中,特别是当边界条件难以确定时,则需两种方法结合起来,以求得可靠的解答。
2. 载荷分类:作用于物体的外力可以分为体积力和表面力,两者分别简称为体力和面力。
所谓体力是分布在物体体积内的力。
例如重力和惯性力,物体内各点所受的体力一般是不同的。
所谓面力是分布在物体表面上的力。
如风力、流体压力、两固体间的接触力等。
物体上各点所受的面力一般也是不同的。
3. ABAQUS ANSYS NASTRAN ADINA各有什么优缺点ABAQUS是一套先进的通用有限元系统,属于高端CAE软件。
优点:1. 非线性结构方面的分析很强大。
它对于多载荷步的计算和规划,以及它的软件设计思想,非常严密而且直观。
可以分析复杂的固体力学和结构力学系统,特别是能够驾驭非常庞大的复杂问题和模拟高度非线性问题。
ABAQUS不但可以做单一零件的力学和多物理场的分析,同时还可以做系统级的分析和研究,其系统级分析的特点相对于其他分析软件来说是独一无二的。
2. 操作界面友好,不是其他CAE软件可以比拟的。
塑性力学期末总结

塑性力学期末总结尊敬的教授、亲爱的同学们:大家好!我是XX大学土木工程专业的学生,今天我非常荣幸地在这里向大家分享我的塑性力学期末总结。
在过去的一个学期里,我从这门课中学到了很多关于塑性力学的知识,让我对这个领域有了更深入的理解和认识。
首先,我想简要介绍一下塑性力学的基本概念。
塑性力学是研究物质在超过其弹性极限时产生形变和失去弹性恢复能力的力学学科。
在结构工程、材料科学以及地质工程中,塑性力学发挥着重要的作用。
通过研究塑性行为,可以预测物质在应力作用下的变形和破坏情况,从而为工程设计提供参考和指导。
在本学期的学习中,我主要掌握了塑性力学的基本原理和数学模型。
塑性力学的基本原理可以概括为两个方面:流动准则和能量原理。
流动准则描述了物质在塑性变形时所满足的条件,常用的准则有屈服准则、流动准则和强度准则等。
能量原理则是通过分析力学中的能量守恒原理推导出的,用于描述材料在塑性变形过程中会消耗多少能量。
为了进一步了解和应用塑性力学的原理和模型,我们还需要学习塑性力学的基本方程和数学方法。
在这门课中,我学习了塑性力学的单轴拉伸、双轴拉伸和多轴受压等基本问题的解法。
通过使用这些方法,我们可以计算材料在复杂应力状态下的变形和破坏情况,从而为实际工程问题的解决提供依据和方法。
除了理论知识的学习,本学期的课程还强调了实践和应用的能力培养。
教授布置了一些实际案例和工程问题,要求我们运用所学的知识进行分析和解决。
例如,我们需要分析一根受力梁的变形和破坏情况,还需要对某个建筑物的承载能力进行评估。
通过这些实践和应用,我逐渐提高了自己的问题解决能力和工程思维能力。
此外,塑性力学的计算方法和工具也是本学期课程的重要内容。
我们学习了一些计算塑性力学问题的常用软件和工具,如ANSYS、ABAQUS等。
这些工具可以帮助我们更加方便、快速地进行力学分析和计算。
通过参与课堂演示和实验操作,我熟悉了这些工具的操作和使用,提高了自己的计算能力和工程实践经验。
弹塑性力学——精选推荐
弹塑性⼒学应⼒应变关系应⼒应变都是物体受到外界载荷产⽣的响应。
物体由于受到外界载荷后,在物体内部各部分之间要产⽣互相之间的⼒的作⽤,由于受到⼒的作⽤就会产⽣相应的变形;或者由于变形引起相应的⼒的作⽤。
则⼀定材料的物体其产⽣的应⼒和应变也必然存在⼀定的关系。
在⼒学上由于平衡⽅程仅建⽴了⼒学参数(应⼒分量与外⼒分量)之间的关系,⽽⼏何⽅程也仅建⽴了运动学参数(位移分量与应变分量)之间的连系。
所以平衡⽅程与⼏何⽅程是两类完全相互独⽴的⽅程,它们之间还缺乏必要的联系,这种联系即应⼒和应变之间的关系。
有了可变形材料应⼒和应变之间关系和⼒学参数及运动学参数即可分析具体的⼒学问题。
由平衡⽅程和⼏何⽅程加上⼀组反映材料应⼒和应变之间关系的⽅程就可求解具体的⼒学问题。
这样的⼀组⽅程即所谓的本构⽅程。
讨论应⼒和应变之间的关系即可变为⼀定的材料建⽴合适的本构⽅程。
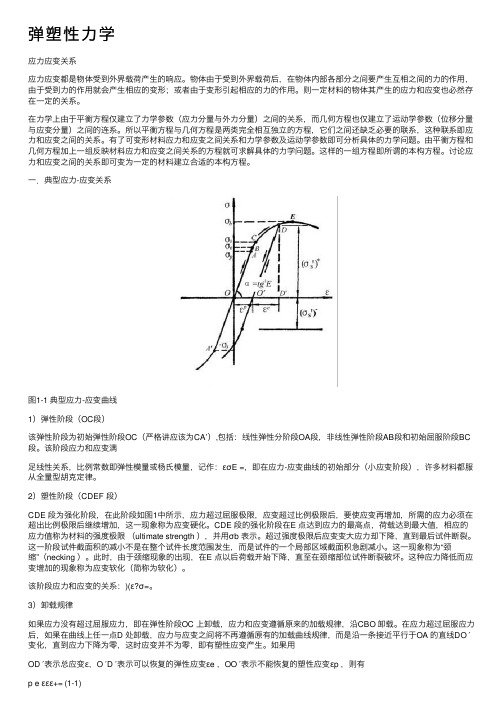
⼀.典型应⼒-应变关系图1-1 典型应⼒-应变曲线1)弹性阶段(OC段)该弹性阶段为初始弹性阶段OC(严格讲应该为CA’),包括:线性弹性分阶段OA段,⾮线性弹性阶段AB段和初始屈服阶段BC 段。
该阶段应⼒和应变满⾜线性关系,⽐例常数即弹性模量或杨⽒模量,记作:εσE =,即在应⼒-应变曲线的初始部分(⼩应变阶段),许多材料都服从全量型胡克定律。
2)塑性阶段(CDEF 段)CDE 段为强化阶段,在此阶段如图1中所⽰,应⼒超过屈服极限,应变超过⽐例极限后,要使应变再增加,所需的应⼒必须在超出⽐例极限后继续增加,这⼀现象称为应变硬化。
CDE 段的强化阶段在E 点达到应⼒的最⾼点,荷载达到最⼤值,相应的应⼒值称为材料的强度极限(ultimate strength ),并⽤σb 表⽰。
超过强度极限后应变变⼤应⼒却下降,直到最后试件断裂。
这⼀阶段试件截⾯积的减⼩不是在整个试件长度范围发⽣,⽽是试件的⼀个局部区域截⾯积急剧减⼩。
这⼀现象称为“颈缩”(necking )。
弹塑性力学基本知识

dε p =
塑性功增量: dW = σ ij dε ij
p p
2 p p deij deij 3
(13) (14)
等效剪应变 (或剪应变强度) : Γ=
2eij eij
(15)
T = 等效剪应力 (或剪应力强度) : 4 3 1 3
1 2
sij sij
(16)
八面体剪应变: γ8 =
eij eij 2 3
P dε ij = dλ1
∂f1 ∂σ ij
(49)
特殊情况, 若σ1 = σ 2 ≥ σ 3 , 则应力状态处于 f1 = σ 2 − σ 3 − σ s = 0 和 f 2 = σ 1 − σ 3 − σ s = 0
的交点处,则:
dε iP = dλ1
z 硬化模型(三类) 等向硬化:
∂f1 ∂σ i
加载
中性变载
(37)
卸载
⎛ P ⎜ dε pq ∂f ∂g dσ ij = ⎜ 1 − i ∂σ ij ⎜ ∂ε pq ∂g dε mn ⎜ ∂ε mn ⎝
⎞ ⎟ ∂g ⎟ dε kl ⎟ ∂ε kl ⎟ ⎠
(条件:
∂g ∂ε ij
dε ij > 0 )
(38)
注意:当材料处于硬化阶段时,采用
∂g ∂ε ij
第一、第二、第三偏应力不变张量:
⎫ ⎪ ⎬ ⎪ ⎭
(7)
J1 = skk = 0 J2 = 1 2
2 sij sij = I 2 + 3σ m
J 3 = det ( sij ) = sij s jk ski
第二偏应力不变张量:
⎫ ⎪ ⎪ ⎬ ⎪ ⎪ ⎭
(8)
J2 =
1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
当受力物体某点的应力状态满足屈服条件是,该点已经进入塑性阶 段,此时应力与应变不再呈现出线性关系,对于该点弹性本构关系不再 适用。在塑性阶段,应变状态不但与应力状态有关,而且还依赖于整个 应力历史(应力点移动的过程),由于应力历史的复杂性,很难建立一 个 能 包 括 各 种 变 形 历 史 影 响 的 全 量 形 式 的 塑 性 应 力 -应 变 关 系 ,只 能 建 立 应力与应变增量之间的塑性本够关系。当结构材料进入塑性状态之后, 应 力 点 位 于 屈 服 面 上 ,此 时 材 料 的 应 力 -应 变 关 系 将 根 据 加 载 与 卸 载 的 不 同情况而服从不同的规律。若为卸载,则施加的应力增量将使应力点从 屈服面上回到屈服面内,增量应力与增量应变之间仍服从胡克定律。若 为加载,则所施加的增量应力将使应力点在屈服面上移动或移动到新的 屈服面上,此时材料的本构关系服从增量理论。 当个应变分量自始至终都按同一比例增加或减少时,应变强度增量 可以积分求得应变强度,从而建立全量理论的应力应变关系 1.5 边界条件(圣维南原理) 边界条件表示在边界上位移与约束,或应力与面力之间的关系式。 边界条件分为应力边界条件、位移边界条件、混合边界条件,求解弹性 力学问题时,使应力分量、形变分量、位移分量完全满足 8 个基本方程 相对容易,但要使边界条件完全满足,往往很困难。这时,圣维南原理 可为简化局部边界上的应力边界条件提供恒大的方便。圣维南原理描述 如下:如果物体一小部分边界面上的面力是一个平衡力系(主矢量及主 矩都等于零),那么这个面力就会使近处产生显著的应力,而远处的应 力可以不计。
需要满足相容方程,它是偏微分方程,由于不能直接求解,则只能采用 逆解法或半逆解法。 所 谓 逆 解 法 ,就 是 先 设 定 各 种 形 式 的 、满 足 相 容 方 程 的 应 力 函 数 , 从而求出应力分量。然后根据应力边界条件来考察,在各种形状的弹性 体上,这些应力分量对应于什么样的面力,从而得知所设定的应力函数 可以解决什么问题。所谓半逆解法,就是针对所要解的问题,根据弹性 体 的 边 界 形 状 和 受 力 情 况 ,假 设 部 分 或 全 部 应 力 分 量 为 某 种 形 式 的 函 数 , 从而推出应力函数 ,然后来考察这个应力函数是否满足相容方程以及 原来假设的应力分量和由这个应力函数求出其他应力分量,是否满足应 力边界条件和位移单值条件。 2.3 能 量 原 理 由以上的方法可以解决梁的弯曲、薄板弯曲、厚壁圆筒、孔边应力 等问题的求解,然而只有对一些特殊结构在特定加载条件下才能找到精 确解,而对于一般的力学问题,如空间问题,在给定边界条件时,求解 极其困难,而且往往是不可能的。为解决这些问题,数值解法的应用就 有重要的意义,如有限元法、边界元法等,这些解法的依据都是能量原 理。 虚位移原理,在外力作用下处于平衡状态的可变形体,当给予物体 微小虚位移时,外力在虚位移上所做的虚功等于物体的虚应变能。 虚功原理,当物体在已知体力和面力作用下处于平衡状态时,微小 虚面力在实际位移所做的虚功,等于虚应力在真实应变所产生的虚应变 余能。 最小势能原理,即给定外力作用下保持平衡的弹性体,在满足位移 边界条件的位移场中,真实的位移场使其总势能能取最小值。 最小余能原理,在所有满足平衡方程和应力边界条件的静力许可的 应力场中,真实的应力场使余能取最小值。
3 总结
弹塑性力学作为固体力学的一个重要分支,是我们认识物体受力时 应力应变规律的重要基础理论,是分析和解决许多工程技术问题的基础 和依据。结合本专业,树立土的本构模型概念,在有限元计算中根据实 际问题选取合适的本构模型对于问题的求解具有重要意义。
1.1.3 均 匀 性 假 定 假设物体是均匀的。就是说整个物体是由同一种质地均匀的材料组 成的。这样,整个物体的所有部分才具有相同的物理性质,因而物体的 弹性模量和泊松比才不随位置坐标而变。 1.1.4 各 向 同 性 假 定 ( 弹 性 力 学 ) 假 定 物 体 内 一 点 的 弹 性 性 质 在 所 有 各 个 方 向 都 相 同 , 弹 性 常 数 ( E、 μ)不随坐标方向而变化; 1.1.5 小 变 形 假 定 假设物体的变形是微小的。即物体受力以后,整个物体所有各点的 位 移 都 小 于 物 体 的 原 有 尺 寸 ,因 而 应 变 和 转 角 都 远 小 于 1。可 用 变 形 前 的 尺寸代替变形后的尺寸,建立方程时,可略去高阶微量 1.2 应 力 状 态 理 论 应力的概念的提出用到了数学上极限的概念,定义为微小面元上的 内力矢量。在微观层面,我们研究的是一点的应力状态。在宏观层面, 根据物体所受的面力和体力以及其与坐标轴的关系,将物体的应力状态 分为平面应力问题、平面应变问题及空间应力问题。平面应力问题是指 物体在一个方向上的尺寸很小,且外荷载沿该方向的厚度均匀分布(如 矩形薄板) ;平 面 应 变 问 题 则 是 物 体 在 一 个 方 向 上 的 尺 寸 很 大 ,外 荷 载 沿 该 方 向 为 常 数( 如 水 坝 ) 。空 间 应 力 问 题 则 是 一 般 普 遍 的 情 形 。对 应 力 的 分析应用静力学的理论可以得到求解弹塑性力学的平衡微分方程。 1.3 应 变 状 态 理 论 在外力、温度变化或其他因素作用下,物体内部各质点将产生位置 的变化,即发生位移。物体内各质点发生位移后,如果仍保持各质点间 初始状态的相对位置,则物体仅发生刚体位移,如果改变了各点间初始 状态的相对位置,则物体还产生了形状的变化,包括体积改变和形状改 变,物体的这种变化称为物体的变形。在弹塑性力学中,用应变的概念 来描述物体变形,在已知物体位移的情况下,通过几何学工具,结合小 变形假设条件,可推导出求解弹塑性力学的几何方程。 1.4 本 构 理 论 : 本构理论探讨的是物体受到外力作用时应力与应变之间的关系,这 是研究弹塑性力学非常重要的理论。对物体应力应变关系的研究首先总 是通过实验的手段得来,当我们发现物体处于线弹性阶段时,应力与应 变的关系可以通过胡克定律来描述,具体而言又可分为各向同性材料、 各向异性材料、对称性材料等。
应用弹塑性力学读书报告
姓 学 专
名: 号: 业:结构工程
指导老师:
弹塑性力学读书报告
弹塑性力学是固体力学的一个重要分支,是研究可变形固体变形规 律的一门学科。研究可变形固体在荷载(包括外力、温度变化等作用) 作用时,发生应力、应变及位移的规律的学科。它由弹性理论和塑性理 论组成。弹性理论研究理想弹性体在弹性阶段的力学问题,塑性理论研 究经过抽象处理后的可变形固体在塑性阶段的力学问题。因此,弹塑性 力学就是研究经过抽象化的可变形固体,从弹性阶段到塑性阶段、直至 最后破坏的整个过程的力学问题。弹塑性力学也是连续介质力学的基础 和一部分。弹塑性力学包括:弹塑性静力学和弹塑性动力学。 弹塑性力学的任务是分析各种结构物或其构件在弹性阶段和塑性阶 段的应力和位移,校核它们是否具有所需的强度、刚度和稳定性,并寻 求或改进它们的计算方法。并且弹塑性力学是以后有限元分析、解决具 体工程问题的理论基础,这就要求我们掌握其必要的基础知识和具有一 定的计算能力。
1 基本思想及理论
1.1 科 学 的 假 设 思 想 人们研究基础理论的目的是用基础理论来指导实践,而理论则是通 过对自然、生活中事物的现象进行概括、抽象、分析、综合得来,在这 个过程中就要从众多个体事物中寻找规律,而规律的得出一般先由假设 得来,弹塑性力学理论亦是如此。固体受到外力作用时表现出的现象差 别根本的原因在于材料本身性质差异,这些性质包括尺寸、材料的方向 性、均匀性、连续性等,力学问题的研究离不开数学工具,如果要考虑 材料的所有性质,那么一些问题的解答将无法进行下去。所以,在弹塑 性力学中,根据具体研究对象的性质,并联系求解问题的范围,忽略那 些次要的局部的对研究影响不大的因素,使问题得到简化。 1.1.1 连 续 性 假 定 假设物体是连续的。就是说物体整个体积内,都被组成这种物体的 物质填满,不留任何空隙。这样,物体内的一些物理量,例如:应力、 应变、位移等,才可以用坐标的连续函数表示。 1.1.2 线 弹 性 假 定 ( 弹 性 力 学 ) 假 设 物 体 是 线 弹 性 的 。就 是 说 当 使 物 体 产 生 变 形 的 外 力 被 除 去 以 后 , 物体能够完全恢复原来形状,不留任何残余变形。而且,材料服从虎克 定律,应力与应变成正比。
2 求解方法
在弹弹塑性力学里求解问题,主要有三种基本方法,分别是按位移 求解、按应力求解和按能量原理求解。 2.1 位 移 法 它以位移分量为基本未知函数,从方程和边界条件中消去位移分量 和形变分量,导出只含位移分量的方程和相应的边界条件,并由此解出 位移分量,然后再求出形变分量和应力分量。位移法能适应各种边界条 件问题的求解。 2.2 应 力 法 它以应力分量为基本未知函数,从方程和边界条件中消去位移分量 和形变分量,导出只含应力分量的方程和相应的边界条件,并由此解出 应 力 分 量 ,然 后 再 求 出 形 变 分 量 和 位 移 分 量 。按 应 力 法 求 解 平 面 问 题 时 ,