第3章船舶主机遥控
船舶柴油主机遥控系统虚拟仿真软件 功能介绍与使用说明书

船舶柴油主机遥控系统虚拟仿真软件功能介绍与使用说明书单位:大连海事大学船舶电气工程学院联系人:***联系方式:134****7961电子邮箱:*****************.cn目录一、软件介绍 (1)1.1软件简介 (1)1.2软件组成 (2)二、软件功能 (3)2.1模拟柴油机备车、起动、停止、换向等功能 (3)2.2模拟操作部位切换功能 (4)2.3应急操作功能 (4)2.4含船舶柴油机数字调速器功能模块 (5)2.5含气动逻辑单元操纵和气路控制功能模块 (7)2.6含柴油机运行三维显示功能模块 (8)2.7具有报警功能 (8)2.8含主机安全保护控制功能模块 (8)2.9支持远程网络控制功能 (9)2.10支持多终端实时操作硬件的功能 (9)2.11支持硬件数据采集的功能 (9)三、软件界面 (10)3.1登录界面 (10)3.2主界面 (10)3.3驾驶台界面 (11)3.4集控室界面 (13)3.5集控车钟界面 (14)3.6安保系统界面 (16)3.7警报界面 (19)3.8调速器界面 (20)3.9机旁控制界面 (21)3.10气动操纵界面 (24)3.11状态曲线界面 (25)3.12主机模型界面 (26)四、软件使用说明 (27)4.1登录的操作 (27)4.2操作部件的使用 (28)4.2.1车钟的操作 (28)4.2.2阀门的操作 (29)4.2.3手柄的操作 (29)4.2.4其他元器件的操作 (30)五、操作实训参考试题 (32)5.1题目——主机备车操作 (32)5.2题目——主机操纵位置切换操作(驾驶台切换到集控室) (32)5.3题目——驾驶台遥控操作(主机启停) (33)5.4题目——集控室遥控操作(主机启停) (33)5.5题目——机旁应急操作(主机启停) (34)5.6题目——紧急停车操作 (34)5.7题目——设置轮机长最大转速限制 (35)5.8题目——故障排除 (35)5.9题目——设置故障以及安全保护系统的使用 (35)一、软件介绍1.1软件简介大连海事大学自动化专业是辽宁省普通高等学校一流本科教育示范专业,辽宁省本科工程人才培养模式改革试点专业,辽宁省普通高等学校创新创业教育试点专业,依托专业建设的自动化实验教学中心为辽宁省本科实验教学示范中心。
船舶柴油主机遥控系统图文

船舶柴油主机遥控系统图文1. 背景介绍在现代船舶上,主机是船舶最大的能源装备。
主机的良好运行是保证船舶顺利进行各种航行任务的重要保障。
电力系统需求的增加和电气化航运的发展,船舶的主机也越来越多的采用柴油机作为主要的能源装备。
对于大型的船舶,由于船舶本身和船员数量的增多,传统的手动操作方式已经不能满足现代化的要求,因此远程遥控系统变得越来越重要。
2. 整体构成船舶柴油主机遥控系统主要由控制器、遥控面板、柴油机和其他辅助设备组成。
控制器负责接收遥控信号,通过遥控面板进行控制柴油机的启停和调速。
当控制器接收对应的指令后,会自动向柴油机的燃油喷油系统以及空气控制系统进行输出指令,以满足相应的负载需要。
同时,系统还通过传感器实现对柴油机的各种数据进行检测,以根据需要实现自动化控制和报警。
3. 控制器控制器是整个船舶柴油主机遥控系统的核心部件,主要用于接收遥控信号和进行自动化控制。
控制器通常采用嵌入式处理器和可编程逻辑控制器等技术,具有多通道、高速度、高精度和可靠性的特点,具有良好的工作效率和稳定性。
4. 遥控面板遥控面板是船员操作遥控系统的主要界面,可将人的指令传递给主机的控制器。
通过遥控面板可以实现主机的启停、调速和故障报警等功能。
遥控面板通常采用模拟和数字式两种不同的信号形式,模拟式是通过旋转撬杆实现柴油机调速控制,数字式则是通过触摸屏实现。
5. 柴油机柴油机是船舶柴油主机遥控系统的关键部件,根据应用不同可以选择不同的型号和品牌。
柴油机的主要功用是将化学能转化成机械能,提供船舶的动力输出。
在船舶柴油主机遥控系统中,通常使用高功率输出的柴油机,以满足船舶各种工作状态下的运行要求。
6. 其他辅助设备除了控制器、遥控面板和柴油机外,船舶柴油主机遥控系统还需要其他辅助设备来配合工作,例如传感器、伺服电机、电控阀、运动控制器等。
传感器负责检测柴油机的各种参数,如转速、油压、水温等,以便控制器对柴油机的运行状态进行监测和控制。
船舶主机的控制系统
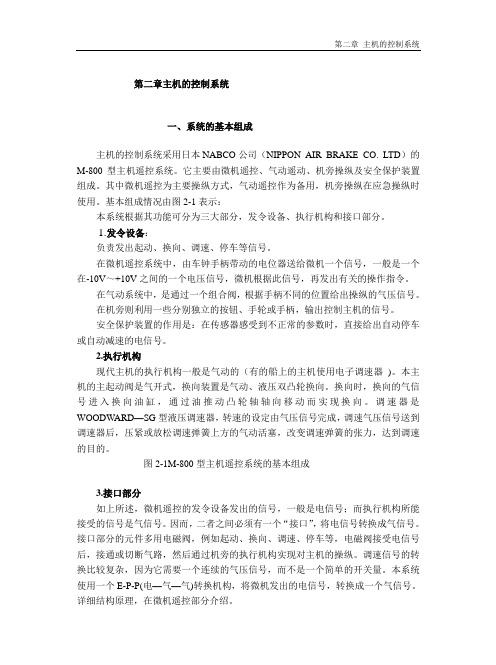
第二章主机的控制系统一、系统的基本组成主机的控制系统采用日本NABCO公司(NIPPON AIR BRAKE CO. LTD)的M-800型主机遥控系统。
它主要由微机遥控、气动遥动、机旁操纵及安全保护装置组成。
其中微机遥控为主要操纵方式,气动遥控作为备用,机旁操纵在应急操纵时使用。
基本组成情况由图2-1表示:本系统根据其功能可分为三大部分,发令设备、执行机构和接口部分。
1.发令设备:负责发出起动、换向、调速、停车等信号。
在微机遥控系统中,由车钟手柄带动的电位器送给微机一个信号,一般是一个在-10V~+10V之间的一个电压信号,微机根据此信号,再发出有关的操作指令。
在气动系统中,是通过一个组合阀,根据手柄不同的位置给出操纵的气压信号。
在机旁则利用一些分别独立的按钮、手轮或手柄,输出控制主机的信号。
安全保护装置的作用是:在传感器感受到不正常的参数时,直接给出自动停车或自动减速的电信号。
2.执行机构现代主机的执行机构一般是气动的(有的船上的主机使用电子调速器)。
本主机的主起动阀是气开式,换向装置是气动、液压双凸轮换向。
换向时,换向的气信号进入换向油缸,通过油推动凸轮轴轴向移动而实现换向。
调速器是WOODW ARD—SG型液压调速器,转速的设定由气压信号完成,调速气压信号送到调速器后,压紧或放松调速弹簧上方的气动活塞,改变调速弹簧的张力,达到调速的目的。
图2-1M-800型主机遥控系统的基本组成3.接口部分如上所述,微机遥控的发令设备发出的信号,一般是电信号;而执行机构所能接受的信号是气信号。
因而,二者之间必须有一个“接口”,将电信号转换成气信号。
接口部分的元件多用电磁阀,例如起动、换向、调速、停车等,电磁阀接受电信号后,接通或切断气路,然后通过机旁的执行机构实现对主机的操纵。
调速信号的转换比较复杂,因为它需要一个连续的气压信号,而不是一个简单的开关量。
本系统使用一个E-P-P(电—气—气)转换机构,将微机发出的电信号,转换成一个气信号。
《轮机自动化》数字化教材项目三任务五.

项目三船舶主机遥控系统【项目描述】船舶主机遥控系统(Main engine remote control system)是操纵船舶主机的设备,通过主机遥控系统能对主机进行起动、停车、换向等逻辑控制和对主机的转速进行闭环控制。
同时还应该对主机的转速和负荷进行必要的限制,并具有必要的安全保护功能。
主机遥控系统不仅能改善轮机人员的工作条件,改善船舶的操纵性能,而且还能提高船舶航行的安全性,以及主机工作的可靠性和经济性,是轮机自动化的重要组成部分,也是现代化船舶实现无人机舱必不可少的条件之一。
对主机遥控系统的操作、维护、管理是轮管人员必须掌握的基本技能。
通过本项目的学习,读者应达到以下要求:一、知识要求1、主机遥控系统的组成、主要功能及类型;2、气动操纵系统中的主要元部件;3、车钟系统及操纵部位转换的条件和方法;4、主机逻辑控制(换向、起动、停油、制动等)的条件;5、主机转速与负荷的控制和限制功能;6、MAN B&W MC主机气动操纵系统图。
二、能力要求1、能正确地理解系统的主要功能;2、能理解主机起动、换向、制动的实现方法;3、能区分转速限制、转速控制和燃油限制三者的不同之处;4、能掌握主机气动操纵系统的作用和管理要点,并能分析系统的典型故障。
三、素质要求1、养成善于动脑、勤于思考、及时发现问题的学习习惯;2、提高理论联系实际的能力,培养善于分析和解决主机遥控系统实际问题的能力;3、培养理性思维能力和科学求实的精神;4、培养学习新技术的能力,增强创新意识。
【项目实施】任务五主机转速与负荷的控制和限制一、学习目标1、了解主机转速与负荷的气动和电动控制限制回路。
2、重点掌握主机转速与负荷的气动和电动控制限制回路分析方法。
二、学习任务本项目的主要任务是掌握主机转速与负荷的气动和电动控制限制回路及故障排除方1法。
三、背景知识主机的转速控制除了与其它自动控制系统一样需要考虑其品质指标外,还需兼顾其控制后果。
项目三任务三知识点2微课件.
通过控制三个微动开关的动作给出开关量车令信号:
松手回中给出维持当前转速车令信号; 向左扳,给出“停车(STOP)” 车令信号。
“Joystick”手柄
这三种车令信号通过伺服电机和齿轮机构驱动驾驶台车钟手 柄机构向正倒车方向转动,车钟手柄机构再带动其下设的精 密转速设定电位器实现转速调节,通过压动正、倒车微动开 关给出正、倒车车令信号。 驾驶台转速设定电位器的转速设定信号被反馈到左右舷车钟 手柄操纵台上的转速设定复示表(Setpoint Repeater),供操作 者参照。应该指出的是:左右舷车钟手柄主要是用于离靠港 时控制主机在“微速”下的机动运行,采用“Joystick”车钟 手柄是可以有效地满足此种用车操纵要求的。
侧翼操作实现的两种方案:
①在左右舷各设置一个与驾驶台完全一样的车钟手柄,它 们可以完全独立地向主机遥控系统发送各种车令信号,具 有完全独立操纵主机的功能; ②在侧翼操作台设置“Joystick”手柄(香蕉柄),“Joystick” 手柄必须通过驾驶台的车钟系统间接完成车令发送任务。 向前推,给出“正车加速(Increase Ahead)” 车令信号; 向后拉,给出“倒车加速(Increase Astern)” 车令信号;
项目三 船舶主机遥控系统
任务一
任务二 任务三
主机遥控系统的组成、功能及类型
主机遥控系统的主要气动阀件及气源 车钟系统及操作部位的转换
任务四* 主机遥控系统的逻辑控制 任务五* 主机转速与负荷的控制和限制 任务六 MAN B&W主机气动操纵系统
返回目录
任务三 车钟系统组成及操纵部位转换
一、车钟系统概述 1. 主车钟 2. 副车钟 3. 主车钟发讯原理
船舶自动化领域的一个重要组成部分是主机遥控系统

船舶自动化领域的一个重要组成部分是主机遥控系统。
目前主机遥控系统技术方案多种多样,本文采用PLC工业控制网络来实现主机遥控系统的功能,具有经济性能好、硬件电路结构简单、工作安全可靠的特点。
在多PLC控制网络实现主机遥控系统设计的基础上,研讨主要设计整个PLC网络的总体结构和通讯方案,并通过通讯网络实现对主机的起停部分的自动控制及安保系统设计。
2 主机遥控PLC网络控制总体结构设计及通讯方式的实现2.1 主机遥控PLC网络控制总体结构设计PLC控制网络用于主机遥控系统的控制,包括两台S7-200PLC。
其中一台用于主机起停和转速调节控制,安装在机控室;另一台用于完成电子调速器的任务,安装在机舱。
另设计算机作为监视平台,用来监视整个系统的重要信号。
整个网络的主要设备为:两台S7-200PLC、一台微型机、网络连接器、PC/PPI电缆、RS-4 85电缆。
根据总体通讯设计思路,我们的总体结构图设计如图1。
图1 总体结构图如图,主站PLC通讯口出来地总线分别通过网络连接器和PC/PPI电缆和从站PLC以及计算机通讯。
主从站之间通过RS-485总线进行PPI协议通讯,主站和计算机终端通过PC/P PI电缆进行自由口通讯。
从主站PLC通讯口出来连接上网络连接器,是为了隔离,以免计算机RS-232口损坏。
通过网络连接器出来地线以及RS-485信号A和B通过比较高低电平与从站进行通讯。
同时通过PC/PPI电缆的连接口引出5针通过RS-485和RS-232转换成3条线分别为接收、发送和地线,与计算机进行通讯。
S7-200PLC通讯口的引脚分配见附表。
附表通讯口引脚分配2.2 多通讯协议的组合及调试在S7-200网络通讯中,可以实现两种通讯协议进行通讯而不互相干扰。
但前提是两种协议的波特率必须相同,由于只有一个通讯口,波特率只支持9600波特,因此在多协议通讯时,波特率设置为9600波特。
对于多协议的组合方式,作者采用了总线分时复用法,在总线分时控制中,作者通过几个定时器组成矩形波,从而形成高低不同时段分别进行PPI协议通讯和自由口通讯。
船舶主机遥控系统故障分析
现代的船舶基本上都已经实现了现代化,船舶的主机系统也实现了高科技,而且发展较快,在其主机系统发展的历程最早是气动式的控制系统,再到电动式发展,如今已经发展为电子集成气动式,甚至很多船舶已经使用了微机气动式的控制系统。
主机遥控系统是现代化船舶的核心技术,此系统是微机控制的,集控室等于主机之间的信号交流,系统控制的内容多且繁杂,其逻辑关系是人脑所不能理清楚的。
正是因为控制系统的复杂性,一旦船舶的主机发生了故障,一时间很难找到故障部位。
而主机系统出现了故障,将会使主机不能正常启动,进而威胁到船舶的正常运行。
船舶轮机管理人员只有掌握了各种现代化的科学技术和原理,能对船舶主机遥控系统有全面的专业知识,才能比较快速,准确的做出分析与判断,并且找到故障原因。
船舶现代化的发展,要求能够快速准确的找出船舶主机遥控系统的故障原因。
一、船舶主机遥控系统概述主机遥控是指远离机旁在驾驶台( 或集控室)通过自动控制装置对船舶柴油机主机进行操纵。
如同所有的控制系统一样,主机遥控系统是由控制器和控制对象( 主机 )二部份组成的。
控制器的任务在于不断地采集来自驾驶台的操纵命令和来自主机的运行状态信息,做出判断,自动地根据系统的控制要求,向被控对象发出控制信号,以达到控制目标。
随着船舶自动化技术的发展, 装设主机遥控系统的船舶逐年增多。
比较完善的主机遥控系统通常设有如下功能(或环节):(1)逻辑程序控制,它包括操纵转换位置判断、自动换向、自动起动、重复起动、重起动、制动的逻辑控制;(2)转速与负荷控制,它包括转速信号发送速率限制和负荷程序等;(3)安全保护与应急操作;(4)系统功能模拟试验;(5)系统故障自检等。
组成自动控制系统的元件有气动、机械、液压、继电器----接触器、半导体分立元件、小规模集成电路等不同种类, 在技术发展的不同阶段,主机遥控系统的类型随采用的控制元件不同也有气动式、电动式、电-气式、电-液式等不同。
随着微型计算机在控制领域的广泛应用, 自上世纪八十年代远洋船舶主机遥控系统普遍采用了微型机做为控制器的核心,使系统的设计、生产、使用和维修都更为简单, 可靠性也大大提高。
船舶主机遥控仿真系统的设计与开发的开题报告
船舶主机遥控仿真系统的设计与开发的开题报告一、选题背景近年来,随着船舶制造业的快速发展,船舶的机电化程度逐渐提高。
其中,主机是船舶的核心部件之一。
传统的操作方式是需要船员现场操纵主机,然而这种操作方式存在安全隐患,且在恶劣的海况下,操作人员的身体也会受到很大的影响。
因此,研发一种船舶主机遥控仿真系统既可以保证船舶安全,又可以提高航行效率,有非常实际的意义。
二、研究目的本次设计研发的船舶主机遥控仿真系统,旨在解决传统操纵方式的不足,以控制船舶主机为例,通过模拟真实情况,实现对主机的遥控操作,让操纵者可以在安全、舒适的环境下进行操作,从而提高船舶航行效率和安全性。
三、研究内容与技术路线1.研究内容(1)船舶主机遥控仿真系统需求分析:根据用户需求,分析船舶主机遥控仿真系统的具体功能和性能要求,确定核心技术和研发方向等。
(2)船舶主机遥控仿真系统架构设计:设计船舶主机遥控仿真系统的总体架构,包括前端控制器、后端控制器、通信传输、数据存储等。
(3)船舶主机遥控仿真系统界面设计:设计船舶主机遥控仿真系统的界面,使其直观、易用。
(4)船舶主机遥控仿真系统数据采集与处理:设计数据采集和处理模块,实现对船舶主机数据的采集和解析处理。
(5)船舶主机遥控仿真系统远程控制:设计远程控制模块,实现对船舶主机的遥控操纵。
2.技术路线(1)前端开发使用Vue.js框架编写前端控制器组件。
(2)后端开发使用Spring Boot框架编写后端控制器组件。
使用Netty框架进行通信。
(3)数据采集与处理使用Modbu-RTU通信协议进行数据采集。
使用Java实现Modbus-Rtu解析。
(4)远程控制使用客户端-服务器技术实现遥控操纵。
使用WebSocket实现远程数据传输。
四、研究计划(1)第一阶段(2周)船舶主机遥控仿真系统需求分析。
(2)第二阶段(4周)船舶主机遥控仿真系统总体架构设计和界面设计。
(3)第三阶段(6周)数据采集、处理模块和远程控制模块的研发。
《轮机自动化》数字化教材项目三任务六.
项目三船舶主机遥控系统【项目描述】船舶主机遥控系统(Main engine remote control system)是操纵船舶主机的设备,通过主机遥控系统能对主机进行起动、停车、换向等逻辑控制和对主机的转速进行闭环控制。
同时还应该对主机的转速和负荷进行必要的限制,并具有必要的安全保护功能。
主机遥控系统不仅能改善轮机人员的工作条件,改善船舶的操纵性能,而且还能提高船舶航行的安全性,以及主机工作的可靠性和经济性,是轮机自动化的重要组成部分,也是现代化船舶实现无人机舱必不可少的条件之一。
对主机遥控系统的操作、维护、管理是轮管人员必须掌握的基本技能。
通过本项目的学习,读者应达到以下要求:一、知识要求1、主机遥控系统的组成、主要功能及类型;2、气动操纵系统中的主要元部件;3、车钟系统及操纵部位转换的条件和方法;4、主机逻辑控制(换向、起动、停油、制动等)的条件;5、主机转速与负荷的控制和限制功能;6、MAN B&W MC主机气动操纵系统图。
二、能力要求1、能正确地理解系统的主要功能;2、能理解主机起动、换向、制动的实现方法;3、能区分转速限制、转速控制和燃油限制三者的不同之处;4、能掌握主机气动操纵系统的作用和管理要点,并能分析系统的典型故障。
三、素质要求1、养成善于动脑、勤于思考、及时发现问题的学习习惯;2、提高理论联系实际的能力,培养善于分析和解决主机遥控系统实际问题的能力;3、培养理性思维能力和科学求实的精神;4、培养学习新技术的能力,增强创新意识。
【项目实施】任务六MAN B&W-MC/MCE主机气动操纵系统一、学习目标1、以集控室操纵为重点,掌握MAN-B&W-MC/MCE型主机气动操纵系统在停车、换向、起动等各种工况下的工作机理。
2、掌握喷油定时自动调节(VIT机构)的工作原理。
二、学习任务12 读懂操纵系统气路图,为MAN-B&W-MC/MCE 型主机气动操纵系统的管理维护及典型故障分析奠定基础。
船舶主机遥控试验程序
船舶主机遥控试验程序ME Remote Control System Test1.主机控制位置转换试验ME Change-over of Control Position在主机停车的情况下,按下列顺序转换主机控制位置试验:When ME in stopping, change-over control position according to the following:机旁集控室驾驶室集控室机旁E/S ECR W/H ECR E/S检查转换过程中各控制位置显示和报警的正确性。
Check the correctness of indication and alarm of each control position. 2.主机遥控系统试验(分别在集控室和驾驶室进行)Remote Control System Test (in ECR and W/H respectively)2.1起动和停车试验Starting and Stopping ME在主机停车的情况下,按正车慢速停车倒车慢速停车的顺序分别用慢转方式和正常方式起动主机。
检查遥控起动和停车的功能。
When M/E in stopping, Start ME by means of slowing turning and normal starting respectively in sequence of ahead slow stop astern slow stop.2.2遥控倒车试验 Remote Astern ME在主机慢速运转的情况下,进行正常倒车和应急倒车试验。
ME in slow turning, carry out normal astern and crash astern test.2.3起动连锁报警试验 Starting Interlock模拟下述情况工况,检查起动连锁故障报警:Mimic the following condition and check starting interlock alarmA)盘车机啮合Turning gear engagedB)切断燃油供给Fuel oil cut offC)应急停车按钮动作(包括主滑油压力过低)Emergency stopping on( including main L.O. pressure low)D)起动空气不正常Starting air pressure abnormalE)辅助鼓风机不运行Auxiliary blower not in running2.4 三次起动失败报警试验Thrice Starting Failure按下列步骤进行三次起动失败试验:Carry out thrice starting failure test according to the following steps:A)备车;ME is stand-byB)切断进主机的空气;Load limit due to the scavenging air pressure for governor is cancelled. Cut off air inlet ME.C)车钟手柄从停车位置到正车微速.向主机送起动空气,主机应自动起动三次失败并报警.Turn telegraph handle from stop to ahead dead slow, supply air to ME, ME should starting thrice automatically and failure alarm is given.2.5起动失败报警试验Starting Impossible3.主机安全系统试验ME Safety System3.1手动应急停车试验Manual Emergency Stop在主机正车慢速运转的工况下,分别在机旁、集控室和驾驶室按下应急停车按钮,检查主机应急停车功能及报警。