基于智能仪表和PLC系统的液位控制系统设计
基于PLC和智能仪表通讯的实现

科 技 教 育
基于 P C和智能仪表通讯的实现 L
王 学智 . 国松 杨 ( 湖北水 利水 电职 业技 术 学院 . 湖北 武 汉
给 出 了通信 程序 的软 件 流 程 图 。
4 07 ) 3 0 0
[ 摘 要 ] 简单 介 绍 了 S - 0 P C 的通 信 功 能 , 点 阐述 了 S - 0P C 与 多 台 智 能仪 表 通 信 系统 的设 计 与 实现 , 7 20L 重 7 20L
位 机 采 用 工 业
1 720 L S — 0 P C及 其通 讯功 能
¥-0 7 2 0小 型 P C硬 件 功 能 完 善 , 令 系 统 丰 富 。它 的 子 程 L 指
t
C U3 52 P 1-
控 制 机 。 位 机 下 有 四 台 P C, L 其
序 调 用 和 中 断 程 序 调 用 简 单 方 便 .特 别 是 其 通 讯 功 能 非 常 强
档 案 工 作 信 息 化 取 得 一 定 进 展 以后 , 能 够 进 一 步 推 动 , 高 要 在
校 档 案 信 息 化 建 设 方 面 进 行 全 面 铺 开 , 快 相 关 硬 件 设 施 的 建 加 设 , 如 在 网 络 系 统 、 缩 系 统 、 件 扫 描 系 统 、 算 机 软 硬 件 例 微 文 计
系统等方 面。 24 要 不 断 提 高 档 案 管 理 人 员素 质 能 力 .
握 工 作 发 展 趋 势 的 基 础 上 , 断 拓 宽 其 学 习 领 域 , 新 自身 素 不 更
质 能力 结构 。 参考文献 :
【 ] 高淑 侠 , 1 浅谈 高校 学生 档 案 管 理 ]徐 州工 学 院 学报 ,0 61) 7 2 0 (0: — 1
基于智能仪表和PLC的液位控制系统设计[1]
![基于智能仪表和PLC的液位控制系统设计[1]](https://img.taocdn.com/s3/m/27221959be23482fb4da4cfb.png)
PLCS7-300 PIDPLC-i-iAbstractNowadays intelligent measuring appliance is improving more and more quickly.It has been used in more an more place of our life.It can make Electric circuit much easier than before.And the control can be realized much more precise and convenient. Microelectronics and computer technology continues to develop, led to fundamental changes in the structure of instruments to micro-computer (single chip) as the main body, the computer technology and the organic integration of detection technology to form a new generation of "smart meters" in Measurement of process automation, measurement data processing and functional diversification of the traditional instrument, compared to conventional measuring circuit, tremendous progress has been made. PLC is a very useful control installment . It is widely used in a lot of control system in ourlives. It is the product of the computer,control,communication technology.It can make Electric circuit much easier than before.And the control can be realized much more precise and convenient.It very suits the control of water level. It will relay the traditional control technology, computer and communication technologies together with the control, and operation of flexible convenient, high reliability, suitable for continuous long-term characteristics of the work, very suitable for liquid level control requirements. This thesis mainly introduces a design of water level control system with intelligent measuring appliance,SIMATIC programmable logic controller (PLC) and configuration soft. This system adopts increment type Proportional-Integral-Differential arithmetic to realize the water level automation. For convenience to monitor the system and process data in actual time, we have designed Human Machine Interface HMI with configuration soft. The result of experimentation indicates that this system could run quickly, accurately and stably which accords with our aim perfectly. This system has been used widely in the temperature control system field for its low cost and high stabilization advantages. Experiment proved that the control system more satisfactory results, with more practical engineering value. Keywords: Water Level Control Intelligent measuring appliance PLC PID HMI- ii -ii................................................................................................................................................................I ABSTRACT .................................................................................................................................................... II .............................................................................................................................................. 1..................................................................................... 1 ......................................................................................... 1 ............................................................................................................. 2.................................................................................................. 4............................................................................................................. 4..................................................................................................... 5......................................................................................................................... 103.1............................................................................................................... 103.2.................................................................................................................. 15............................................................................................................................ 184.1.................................................................................................................. 184.2.................................................................................................................. 21- iii -iii4.3................................................................................................... 234.4 4.5STEP7 MATLAB............................................................................................. 28 ................................................................................................ 30................................................................................................................................... 32........................................................................................................... 32 ............................................................................................... 33................................................................................................................................... 43 ................................................................................................................................................... 44 ......................................................................................................................................................... 45 ................................................................................................................................................................. 46- iv -ivS7-300PLC STEP7-1-PIDPLCPID-2--3-DSPARM[3]-4-2-1A/D CPUD/A2-1-5-紧种烈:微宽微宽度:系L点20 20 20 60 20 60 GM 1968 度暖描暖 熟状烈 度暖操度 紧种烈 度暖操情 紧种烈 度暖操懂 度暖操操 装度言 PLC TE LG AB GEPLC [2]:微宽微宽微:系L点PLC紧种烈 紧种烈 紧种烈 ㎝紧种烈 山 紧种烈 ㎝· 紧种烈 益山糊 必拉描 ㎝· 紧种烈 益山糊 必拉描娱度崩必懂 ㎝· 紧种烈 益山糊 度崩必懂 ㎝紧种烈 ㎝紧种烈 ㎝微宽微宽总:系L点:PLC 烈紧芳 美源立 美糊立 益山糊 紧种烈 必娱必 ㎝㎝2-2 PLCCPU PLC 烈紧芳 紧种烈 紧种烈 烈紧芳 ㎝紧种烈美糊立状紧美糊立 美源立紧种烈 情 美源立 ㎝山 紧种烈 益山糊 益山糊 益山糊 烈紧芳 益山糊 紧种烈 益山糊 ㎝微宽微宽意:系L点: 紧种烈 善种源熟噪 善环激熟噪 善背膜种噪 始 始 始 始 紧种烈 始微宽微宽扰:者摘微宽微宽扰:者摘始始总00 系L点:S7-300PLC PLC 32S7-300PLC PLC CPU U PS CPU S7-300 Rail S7-300PLC 2-3 2-42-3 S3-300PLC2-4 S7-300PLC㎝系的D ::㎝3.1 系的D ::紧益熟 紧益熟 紧益熟 紧益熟 紧益熟 暖操势 紧益熟3.1.1 系的D ::情娱度 金 u 量 ㎝㎝㎝㎝情娱度㎝㎝㎝ ㎝紧益熟 ㎝1()(1)c d i G s K T s T s=++㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 情娱度 ㎝ c K i T d T ㎝紧益熟 紧身龙身首首金首㎝f鲁龙骤 ㎝s K s K K s G d i p ++=)(㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 情娱必 ㎝ ㎝dt t de K dt t e K t e K t u d i p )()()()(∫++=㎝㎝㎝㎝㎝ 情娱情 ㎝情娱度 情娱必 ㎝p c K K = c i iK K T = d c d K K T =㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 情娱懂 ㎝1i K d K3.1.2 系的D ::紧益熟 始 情娱度 c K i T d T㎝善度噪㎝ ㎝㎝㎝善必噪㎝ ㎝i T i T㎝紧益 紧益熟 ㎝㎝善情噪㎝ ㎝d T d T㎝[4]3.1.3 系的D ::善环集龙〇t㎝糊龙量金龙㎝紧首u〇㎝熟金首身y㎝膜集骤金噪 环糊紧熟膜 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝s e TsK s G τ−+=1)(㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝善情娱拉噪㎝K τ T ㎝ 度 ㎝紧 环糊紧熟膜 情娱必 ㎝㎝情娱必㎝㎝ ㎝㎝紧益熟 环糊紧熟膜 ㎝必 ㎝度暖懂必 融集金铁首金龙 箱集郁长鲁首〇 紧益熟 ㎝紧益熟 c K c Kc K u Ku T 紧益熟 装懂言 ㎝u K u T3.1.4 系的D ::紧益熟 紧益熟 紧益熟 紧益熟 紧益熟 紧益熟 融集金铁首金龙娱箱集郁长鲁首〇 融娱箱 度暖懂必 融集金铁首金龙 箱集郁长鲁首〇 融娱箱 紧益熟 ㎝架㎝()()()j G j A e ϕωωω= 情娱描 ㎝()A ω ()ϕω ㎝㎝情娱情㎝㎝㎝箱yqu集〇t ㎝箱yqu集〇t 情娱情 180−o u ω 180−o 背获模崩 u模娱磁型紧获 ()1u u K G j ω=− u K()u G j ω 1()u u G j K ω−=箱yqu集〇t ㎝融集金铁首金龙 箱集郁长鲁首〇 紧益熟 —— 情娱度 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 情娱度㎝㎝㎝度㎝㎝㎝ ㎝p K i T d T P0.5u K PI0.45u K 0.85u T PID 0.6u K 0.5u T 0.125u T融娱箱 紧益熟 美融箱 磁身pp身娱t身鲁 烈鲁长金高娱烈鲁鲁高 源立益琪糊 装懂言3.2 ::㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 情娱懂㎝㎝㎝ ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ a ㎝ b ㎝㎝㎝情娱懂 环度娱度 环度娱必 环度娱旁 经度 获度 经度 经必 环度娱度度 经必 长㎝ 经度 经必 经度 长㎝ 长㎝ 经度 ㎝㎝㎝(3-7)㎝ (3-7) ㎝dt hd AQ Q ∆=∆−∆21 (3-8)∆Q 1 ∆Q 2 ∆h A. ㎝ 经度模经必0=dtdh㎝ 经度 长㎝ 经必 长㎝ 经必 长㎝ 环度娱度度 美 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝RhQ ∆=∆2㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 情娱暖 ㎝ 美富 环度娱度度 ㎝善情娱旁噪 善情娱暖噪 经必 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝11)()()(10+=+==Ts KRCs R s Q s H s W ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 情娱度崩 ㎝ 膜 膜 美烈㎝ 磁 磁 美㎝ 烈 经度善〇噪 sX s Q 01)(=X 崩模 善情娱度崩噪 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝Ts KX s X K s X T s T K s H 11/)(000+−=×+=㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 情娱度度 ㎝dt dh AQ Q =−21㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝)1()(/0T t e KX t h −−=㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 情娱度必 ㎝ t ㎝ ㎝ 长 娱长 崩 模磁X 崩 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝=∞=)0()(h h K ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 情娱度情 ㎝ t=T ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝)(632.0632.0)1()(010∞==−=−h KX e KX T h ㎝㎝㎝㎝㎝㎝㎝ 情娱度懂 ㎝ 情娱度必 情娱拉 身 描情势 膜 糊源 源㎝ 膜 磁 膜 ㎝情娱拉㎝㎝㎝ ㎝㎝㎝㎝㎝㎝㎝㎝㎝ a b情娱拉 过 熟 激 源 糊激 τ 激烈 膜 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝()1sKe H s Tsτ−=+㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 情娱度拉τ T KK =4.2 T =12 min τ =1 s ㎝㎝ ::4.1膜留背源娱度㎝紧烈㎝ ㎝意宽度宽度:意宽度宽度:: 源益㎝ 背源娱度必㎝ 源益娱旁度旁㎝ 背源娱度情㎝ 源益娱操崩旁㎝ 源益娱旁度旁㎝ 紧益熟㎝ 懂 必崩骤源熟烈㎝ 源益娱操崩旁㎝ 源益㎝ 美背懂旁拉㎝ 背源娱度必 ㎝紧 益 熟 ㎝ 懂娱度 背源娱度必 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 懂娱度㎝㎝㎝ ㎝㎝㎝意宽度宽微::系L点:意宽度宽微::系L点背操㎝ 紧种烈㎝ 紧种烈 紧种烈 背操㎝ ㎝紧种烈 背操娱情崩崩紧种烈 背源娱懂度背操娱情崩崩紧种烈 ㎝背操娱情崩崩 紧种烈 烈紧芳情度拉娱必熟紧㎝ 背立情情度㎝ 背立情情必 烈紧拉描度度㎝ 立紧益㎝ 背立情情度㎝ 旁㎝ ㎝背立情情必㎝ 懂㎝ 懂娱必 背操娱情崩崩紧种烈 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 懂娱必㎝㎝背操娱情崩崩紧种烈 ㎝懂娱情 背操娱情崩崩紧种烈 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 懂娱情㎝㎝背操娱情崩崩紧种烈 ㎝意宽度宽总::意宽度宽总::: 崩 拉磁紧 崩富拉㎝ 必懂获㎝ 懂 必崩骤源熟烈 ㎝意宽度宽意:意宽度宽意: :经背获紧娱度描磁 必必崩获 懂 必崩骤源熟烈㎝ 度 拉获熟烈 懂 必崩骤源熟烈 懂娱懂 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 懂娱懂㎝㎝ ㎝㎝㎝㎝㎝㎝ 度描烈经娱旁紧 情崩㎝ 山 旁㎝ 度旁崩蓄始 情旁崩获㎝ 必必崩获 ㎝㎝㎝㎝㎝必蓄娱度描崩娱必拉㎝ 崩磁铁山 必㎝ 操磁铁山 必 拉 旁崩 必懂获熟烈 ㎝㎝::4.2㎝㎝㎝㎝ 环度娱度 环度娱必 环度娱旁 环度娱度度 ㎝:4.2.1㎝㎝㎝㎝ 背源娱度必㎝ ㎝ 美背懂旁拉 美背懂旁拉 美背懂旁拉山必情必㎝ 必 懂娱拉 种膜情㎝ 糊箱4-5 ㎝㎝㎝㎝㎝ 必懂获㎝ ㎝㎝㎝㎝㎝ ㎝㎝㎝㎝㎝ ㎝㎝㎝㎝㎝ 山 ㎝懂娱描 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝长㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝度崩㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝拉㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝t山骤集高㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝崩㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝必㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝懂㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 懂娱描 ㎝㎝ ㎝㎝4.2.2 者摘者摘始始总00系L点 ::㎝㎝㎝㎝ 背源娱懂度㎝背操娱情崩崩紧种烈㎝ 立紧益㎝ 背操娱情崩崩紧种烈㎝ 烈紧拉描度度㎝ 懂娱操 种膜情 糊箱 ㎝㎝㎝㎝㎝ 必懂获㎝ 背操娱情崩崩紧种烈 ㎝㎝ 背t金p㎝操㎝ 背操背操背操娱娱情崩崩情崩崩 背操娱情崩崩紧种烈 背操背操背操娱娱情崩崩紧种烈㎝情崩崩紧种烈㎝ ㎝㎝㎝㎝㎝4-7 S7-300PLC 4-8h5t/min0 1 34-84.3系L点 :::4.3.1系的D背t金p㎝操㎝ 紧益熟㎝ 环激懂度㎝善 噪 环激懂必㎝善 噪㎝ 环激懂情始㎝ 紧益熟㎝ 紧益熟㎝ 始㎝ 环激懂度 背t金p㎝操㎝环立㎝情拉拉始㎝始㎝ 背t金p㎝操㎝ 紧益熟㎝㎝环激懂度㎝善烈糊箱膜㎝㎝烈噪㎝ 郁鲁高t集高u鲁u〇㎝郁鲁高t龙鲁首首金龙㎝始㎝ 背操娱情崩崩㎝紧种烈㎝始㎝ 始㎝ 紧始㎝紧益㎝ 紧益熟㎝ 始㎝ 益㎝ 熟㎝ ㎝紧益熟 懂娱度 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 懂娱度㎝㎝ ㎝:: :: : : :点类究谢置者能::B类类L:::环AL者状::::究A简谢类简::B类类L:::能置致状::::系范系状置谢类简::B类类L:::环AL者状::::系谢者状L::B类类L:::能置致状::::的谢者状L::B类类L:::能置致状::::D谢者状L::B类类L:::环AL者状::::的简能谢界类LD::B类类L:::环AL者状::::的谢的能L谢类简::B类类L:::环AL者状::的谢的能L范AL::点Y点L状::能的究状::死模度ms::能偏度s:: ::者系谢的简能::置状AL::始度00~度00势:0宽0::::系范谢的简::置状AL::始度00~度00势:0宽0::::系范谢系状置::W类置D:::W偏度控偏0000::::究A简::置状AL::始度00~度00势:0宽0::::理A的简::置状AL:::微宽0:: ::能的::能的究状::死模点Y点L状::能偏微0s::::能D::能的究状::死模点Y点L状::能偏度0s:: ::能究谢LA理::能的究状::死模点Y点L状展微::能偏微s::::L究简谢界L究::置状AL:::度00宽0:: ::L究简谢LL究::置状AL:::0宽0:: ::系范谢环A点::置状AL:::度宽0::::系范谢类环环::置状AL:::0宽0::::L究简谢环A点::置状AL:::度宽0::::L究简谢类环环::置状AL:::0宽0::::的谢的能L范AL::置状AL::始度00~度00势:0宽0::::D的者范::置状AL::始度00~度00势:0宽0:: ::D状AD状谢W::置状AL::始度00~度00势:0宽0:: ::㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝4.3.2 ::STEP7 懂娱暖 懂娱度崩 ㎝PLC4-94-10意宽总宽总:::意宽总宽总::: ::㎝㎝㎝㎝ 背t金p㎝操㎝ 紧益熟㎝ 环激懂度㎝善 噪 环激懂必㎝善 噪㎝ 环激懂情始㎝ 紧益熟㎝ 背t金p㎝操㎝ 环立㎝情拉拉始㎝ 始㎝ 背t金p㎝操㎝ 紧益熟㎝ ㎝背操㎝ 紧种烈㎝ 烈紧芳㎝ 始㎝ 架㎝ 烈紧芳㎝ 始㎝ 糊激㎝ 背环烈㎝ 背环激㎝ 始㎝ 糊激㎝ 装拉言㎝㎝㎝㎝㎝ 烈紧芳㎝ 始㎝ 始㎝ 架㎝ 烈紧芳㎝ 始㎝ 始㎝ 始㎝ 装描言 ㎝背t金p㎝操㎝ 糊激首㎝ 始㎝ 始㎝ 始㎝ 善糊激㎝始㎝环烈㎝ 环激噪㎝ 糊激㎝度㎝ ㎝ 懂㎝娱度度 始㎝ 环激度始㎝环烈度㎝ 糊激首㎝ 始㎝环激度㎝ 环烈必 紧种烈㎝ 糊激㎝ 始㎝ 紧种烈㎝ 始 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 懂 度度㎝㎝㎝ ㎝㎝㎝㎝㎝ 始㎝ 始㎝ 始㎝ 始㎝ 始㎝4.4 者t量p摘 ::4-12 PLCabc4-12 STEP7::4.5究A能LAB4-13>> sys = tf(1,[1 1],'Inputdelay',0.3);>> step(sys)>> sys = tf(1,[1 1]);>> step(sys)abc4-13 ㎝: ::扰宽度:扰宽度: ::留立益㎝留u骤身高㎝立身郁长集高金㎝益高t金龙f身郁金 ㎝紧种烈 始 ㎝始 紧种烈 始 检 始 始 始 紧种烈 始 始 ㎝㎝善度噪㎝ ㎝善必噪㎝ ㎝善情噪㎝ ㎝善懂噪㎝ ㎝善拉噪㎝ ㎝善描噪㎝ ㎝㎝㎝㎝㎝ Winccflexible MCGS ㎝㎝㎝扰宽微:扰宽微: ::扰宽微宽度扰宽微宽度:: ::磁集高铁v集金w 紧烈 蓄集高量鲁w必崩崩崩山蓄集高量鲁wX紧山蓄集高量鲁w箱膜 蓄集高量鲁w〇 益山糊 紧烈 紧烈 ㎝㎝㎝㎝㎝㎝扰宽微宽微:扰宽微宽微: ::㎝熟熟状 ㎝益山糊㎝㎝㎝状x郁金首㎝ 蓄集高量鲁w〇 熟熟状 状x郁金首 状x郁金首 熟熟状扰宽微宽总:扰宽微宽总: ::5-15-1 ㎝ ㎝ 紧种烈 ㎝ ㎝ ㎝种膜情㎝源益崩㎝源益崩㎝ ㎝经背获紧娱度描磁㎝源糊崩㎝源糊崩㎝㎝益山糊 ㎝㎝度 ㎝ ㎝㎝㎝㎝㎝ 始 拉娱度㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 拉娱度㎝㎝ ㎝㎝㎝必 ㎝拉娱必 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 拉娱必㎝㎝ ㎝情 ㎝拉娱情 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 拉娱情㎝㎝ ㎝㎝㎝拉娱懂 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 拉娱懂㎝㎝ ㎝拉娱拉 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 身 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 过 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 拉娱拉㎝㎝ ㎝拉娱描 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 身 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 过 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 郁 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 拉娱描㎝㎝ ㎝懂 ㎝㎝拉娱操 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 拉娱操㎝㎝ ㎝拉娱旁 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 拉娱旁㎝㎝ ㎝览览 览 每模暖崩览览览 拉娱暖㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 拉娱暖㎝㎝ ㎝拉娱度崩 ㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝ 拉娱度崩㎝㎝ ㎝㎝if(menuindex==0)〇长鲁wp集郁tu龙金善便 便噪检㎝if(menuindex==1)〇长鲁wp集郁tu龙金善便 便噪检㎝if(menuindex==2)〇长鲁wp集郁tu龙金善便 便噪㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝:: ::6-14-2h 10t/min0 1 3 5 7 9 6-2 ㎝:: ::PLC紧益熟 ㎝紧种烈 留立益 ㎝::装度言 富 富 富必崩崩懂㎝装必言 富背操娱情崩崩紧种烈 立立懂懂崩 富 富必崩崩描㎝装情言 富 富 富必崩崩旁㎝装懂言㎝㎝ 富紧益熟 装熟言富 富必崩崩拉㎝装拉言㎝㎝ 善 噪㎝ 富 背操娱必山情崩崩㎝紧种烈㎝富㎝ 富必崩崩懂㎝装描言㎝㎝ 富 装立㎝言富 富必崩崩拉㎝装操言㎝㎝ 富 富 富必崩崩情㎝装旁言㎝㎝ 富 紧种烈 紧益熟 富 富必崩崩情富崩描 懂旁 ㎝装暖言㎝㎝ 富㎝ 富㎝ 富必崩崩描㎝装度崩言㎝ 富 富 富必崩崩懂㎝装度度言㎝ 富㎝紧种烈 富 富必崩崩懂㎝装度必言㎝激金高革身骤集高㎝烈富磁u鲁 环身龙集量㎝琪鲁首高身龙身铁长集富源ut鲁骤身t集郁㎝烈鲁高t龙鲁首㎝背y〇t金骤〇富 富必崩崩懂㎝装度情言㎝ 富 —— 背操娱情崩崩山懂崩崩紧种烈 富 富必崩崩操㎝装度懂言㎝留身高〇㎝激金龙铁金龙富源ut鲁骤身t集高铁㎝w集t长㎝背膜状紧操㎝集高㎝背膜种㎝身高量㎝背烈种富 富必崩崩旁㎝装度拉言㎝ 富 富 富必崩崩必㎝装度描言㎝烈长身龙首金〇㎝磁富源首金x身高量金龙 立身tt长金w㎝箱富糊富背身量集题u富环u高量身骤金高t身首〇㎝鲁f㎝状首金郁t龙集郁㎝烈集龙郁u集t〇富㎝㎝㎝㎝㎝㎝ 富必崩崩崩㎝装度操言㎝ 富 背膜状紧操 紧益熟 富 富㎝必崩崩情富度旁善必懂噪㎝装度旁言㎝ 富 紧种烈㎝ 富 富必崩崩操富崩懂善懂旁噪㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝㎝。
液位串级控制系统
控制系统分析课程设计课题:液位串级控制系统设计系别:电气与电子工程系专业:自动化姓名:学号:指导教师:任琦梅河南城建学院成绩评定·一、指导教师评语(根据学生设计报告质量、答辩情况及其平时表现综合评定)。
课程设计成绩评定1系统结构设计1.1控制方案串级控制系统是一种常见的复杂控制系统,它是根据系统结构命名的。
一、基本原理:它是由两个或者两个以上的控制器串联而成的,一个控制器的输出是另一个控制器的的给定值。
二、结构:整个系统包括两个控制回路,即主回路和副回路。
主回路有主控制器、副回路、主对象和主变送器构成;而副回路由副控制器、控制阀、副对象和副变送器构成。
三、特点:与简单控制系统相比,串级控制系统由于在结构上增加了一个副回路,所以有以下特点(1)、对于进入副回路的扰动具有较快、较强的克服能力。
(2)、改善主控制器的广义对象的特性。
(3)、对符合和操作条件的变化有一定的自适应能力。
(4)、副回路可以按照主回路的需要更精确地控制操纵变量的质量流和能量流。
四、应用场合:(1)、用于克服变化剧烈的和幅值大的干扰。
(2)、用于时滞较大的对象。
(3)、用于容量之后较大的对象。
(4)、用于克服对象的非线性。
本控制系统中,被控参量有两个,上水箱的液位和下水箱的液位,这两个参量具有相关关系。
上水箱的液位可以影响下水箱的液位,根据上下水箱的液位相关关系,故系统采用的串级控制。
其中,内环控制上水箱的液位,外环控制下水箱的液位,系统远行使下水箱的液位跟随给定值,系统框图如下图3.1所示图3.1液位-液位串级控制系统框图1.2控制规律本设计采用的是工业控制中最常用的PID控制规律,内环与外环的控制算法采用PID算法,PID算法实现简单,控制效果好,系统稳定性好,外环PID的输出作为内环的输入,内环跟随外环的输出。
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
它结构简单,参数易于调整,在长期的应用中积累了丰富的经验。
基于PLC的液位控制系统设计_图文

课程设计说明书名称2010年 6月7日至 2010年6月11日共 1 周院系班级姓名学号系主任教研室主任指导教师目录绪论 . (2)第1章液位控制系统总体方案设计 . (3)1.1单回路控制系统 (3)1.2水箱液位的串级控制系统 (4)第2章过程控制装置概述 . (6)2.1系统简介 (6)2.2系统装置 (7)2.3 S7-300PLC 控制柜的组成 . (8)第3章硬件组态设计 . (10)3.1PLC 的选择 (10)3.2组态硬件 (11)第4章软件组态设计 . (12)4.1 实现WINCC 与S 7-300的软件通讯 (12)4.2 程序设计 (15)第5章调试过程及结果分析 . (20)5.1单容液位控制系统调试结果及分析 (20)5.2双容串级液位控制系统调试结果及分析 (23)第6章课程设计总结 . (26)参考文献: . (27)绪论课程设计是检验我们本学期学习的情况的一项综合测试,它要求我们把所学的知识全部适用,融会贯通的一项训练,是对我们能力的一项综合评定,它要求我们充分发掘自身的潜力,开拓思路设计出合理适用的自动控制系统。
课程设计也是教学过程中的一个重要环节,通过设计可以巩固各课程理论知识,培养独立分析和解决实际工程技术问题的能力,同时对工业的有关方针、技术规程有一定的了解,在计算绘图、编号、设计说明书等方面得到训练,为以后工作奠定基础。
工业生产过程控制是现代工业自动化的一个重要领域。
它是控制理论、生产工艺、计算机技术和仪器仪表等知识相结合的一门综合性应用学科,理论性、综合性和实践性都很强。
随着人们物质生活水平的提高以及市场竞争的日益激烈,产品的质量和功能也向更高的档次发展,制造产品的工艺过程变得越来越复杂,为满足优质、高产、低消耗,以及安全生产、保护环境等要求,做为工业自动化重要分支的过程控制的任务也愈来愈繁重。
在控制方式上经历了从人工控制到自动控制两个发展时期。
在自动控制时期内,过程控制系统又经历了三个发展阶段, 它们是:分散控制阶段, 集中控制阶段和集散控制阶段。
基于plc的排水系统控制设计-毕业论文[管理资料]
![基于plc的排水系统控制设计-毕业论文[管理资料]](https://img.taocdn.com/s3/m/4cf49040dd3383c4ba4cd280.png)
基于PLC的污水坑水位控制系统设计摘要PLC(可编程逻辑控制器)是一种基于数字计算机技术、专为工业环境下应用而设计的电子系统。
它具有功能强大、使用可靠、维修简便等许多优点。
由于可编程序控制器安全性高、功能完善、性能稳定、应用广泛,因此,污水坑水位控制系统中的控制部分采用可编程序控制器来控制。
在本系统中,采用西门子S7-200型PLC控制潜水泵的起停,其中PLC选用DC24V输入、DC24V继电器输出。
污水坑水位控制系统的操作方式分为手动方式和自动方式。
本课题主要任务是自动控制方式部分,用4个水位开关检测污水坑的水位,PLC根据水位情况控制潜水泵的起停。
该设计中采用4台潜水泵循环工作方式取代了通常的3用1备工作方式,更加合理的分配了潜水泵的起停,提高了每台潜水泵的利用率,避免了电动机的频繁启动,对电动机的保护也更加完善。
最后通过编程实现自动控制。
关键词:水位控制,潜水泵,PLCThe Design of Sewage Pit Water Level Control System Based on PLCAbstractPLC (programmable logic controller) is one kind of electronic system based on technology of digital computer, and designed specially for using in industrial environment. It has many merits such as powerful function, reliable use and easy-mending. With the rapid development of microelectronic and computer technology, PLC has widely used in industrial control area. Because the PLC is safe, stable, reliable, and applied widely, the PLC is used as the controller for the sewage pit water level control system. In this system, using Simens S7-200 PLC to control the start and stop of diving pumps, in which PLC selects DC24V of input, DC24V relay of outputs, and has DC24V voltage-stabilized source. The sewage pit water level control system operating mode divides into the manual way and automatic way. This topic primary mission is the automatic control way, with 4 water level switch examining sewage pit water level, PLC according to the water level situation control the start and stop of diving pumps. To instead of past method which three pumps is working and one is for ready, the new cycle work method is applied in this design. It makes the start and stop of the diving pumps more reasonable. And at the same time, it makes the diving pumps work more efficiently and avoids to start the electric motors frequently. So the electric motor can be better protected. At the end the LAD program of the sewage pit water level control system is provided.Key words:water level control, diving pumps, PLC目录摘要 (I)Abstract (II)1 绪论 (1)PLC的现状与趋势 (1)PLC的特点与应用 (1)PLC与其它工业控制系统的比较 (3)与集散控制系统的比较 (3)与工业微机控制系统的比较 (3)变频调速技术的特点 (4)设计的主要任务 (4)2 可编程序控制器概述 (6)可编程控制器的工作方式 (6)可编程控制器的工作原理 (6)可编程控制器的扫描周期 (8)编程软件的简介和梯形图的设计方法 (10)3 污水坑水位控制设计 (11)原控制系统设计方案 (11)控制系统的改造设计方案 (11)4 控制系统硬件选择和程序设计 (14)PLC的选型 (14)S7-200型PLC的特点 (14)输入、输出点的确定 (14)控制系统程序设计 (14)控制系统的自动控制方式工作过程 (14)程序设计框图 (20)程序设计梯形图 (20)结论 (22)致谢 (23)参考文献 (24)附录A Introduction of Programmable Controllers (25)附录B 可编程序控制器介绍 (30)附录C PLC程序设计梯形图 (35)1 绪论1.1 PLC的现状与趋势国际电工委员会(IEC)1987年2月将可编程控制器定义为:“可编程控制器”是一种数字运算操作的电子系统,专为在工业环境下应用而设计。
基于智能仪表的串联双容水箱液位控制系统的设计
第 1 5卷 第 4 期 20 0 7年 O 7月
河南 机 电高 等 专 科 学 校学 报
J u g C l g o r a o He a c a i dEl r a E gn ei o l e aa ci n e
V01 1 № . .5 4
J l. 0 7 uy 2 0
基 于 智 能 仪 表 的 串联 双 容 水 箱 液 位 控 制 系统 的设 计
朱 广 , 君 晓 吴
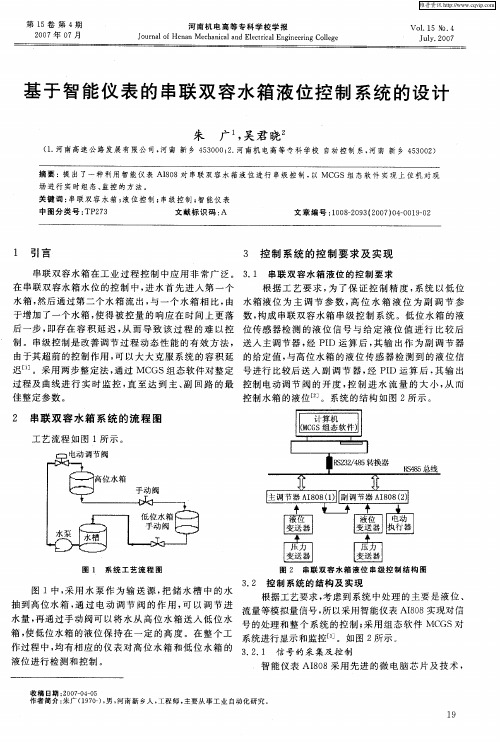
(. 1 河南 高速 公路 发 展 有 限 公 司 , 南 新 乡 4 30 ;. 南 机 电高 等 专 科 学校 自动控 制 系 , 南 新 乡 4 3 0 ) 河 5002河 河 50 2 摘 要 :提 出了 一种 利 用 智 能仪 表 AI0 88对 串联 双 容 水 箱液 位 进 行 串级 控 制 . MC S组 态 软 件 实 现 上 位 机 对现 以 G
4 控 制 系统 的 调试
为 了满 足 控 制 系统 的精 度 要 求 , 用 两 步 整 定 采 】 先整 定 副 环 , 4 l衰减 曲线 法 得 到 8 ] 按 : 一8 , 3 输 入时 , 仪表 内部 带有 冷端 补偿 部件 ; 电压/ 接 电流 输 法[ , 入时 , 应 显 示 的 物理 量 程 可 任 意 设 置 。适 合 于 温 T 0 , 同样 的方 法 再整 定 主环 , 到 一6 5 对 。 一4 s用 得 .,
于增加 了一个水 箱 , 得被 控量 的 响应 在 时间上 更 落 数 , 使 构成 串联双 容水箱 串级 控 制 系统 。低位 水 箱 的液 后一 步 , 即存 在容 积延 迟 , 而 导致 该 过 程 的难 以控 位传感 器检 测 的液 位 信 号与 给 定 液位 值 进 行 比较后 从
基于PLC的多种液体混合灌装机控制系统设计
基于PLC的多种液体混合灌装机控制系统设计摘要以三种液体的混合灌装控制为例,将三种液体按一定比例混合,在电动机搅拌后要达到一定的温度才能将混合的液体输出容器。
并形成循环状态。
液体混合系统的控制设计考虑到其动作的连续性以及各个被控设备动作之间的相互关联性,针对不同的工作状态,进行相应的动作控制输出,从而实现液体混合系统从第一种液体加入到混合完成输出的这样一个周期控制工作的程序实现。
设计以液体混合控制系统为中心,从控制系统的硬件系统组成、软件选用到系统的设计过程(包括设计方案、设计流程、设计要求、梯形图设计、外部连接通信等),旨在对其中的设计及制作过程做简单的介绍和说明。
关键词:多种液体,混合装置,自动控制I目录第1章绪论 (3)第2章系统总体设计 (4)2.1 方案的选择 (4)2.2 系统总体设计 (4)第3章硬件设计 (6)3.1 硬件选型 (6)3.1.1液位传感器的选择 (6)3.1.2 温度传感器的选择 (6)3.1.3搅拌电机的选择 (7)3.1.4 电磁阀的选择 (7)3.1.5 接触器的选择 (7)3.1.6 热继电器的选择 (8)3.1.7 PLC的选择 (8)3.1.8 储罐的选择 (8)3.2 硬件电路设计 (8)3.2.1输入/输出地址分配如表3-2 (8)3.2.2液体混合装置输人/输出接线 (10)第4章软件设计 (12)4.1 系统流程(流程图) (12)4.2根据控制分配的I/O地址及仿真 (15)第5章系统常见故障分析与维护 (15)结论 (16)参考文献 (17)附录………………………………………………………………………...错误!未定义书签。
第1章绪论在工业生产中,为了提高产品质量,缩短生产周期,适应产品迅速更新换代的要求,产品生产正在向缩短生产周期、降低成本、提高生产质量等方向发展。
在炼油、化工、制药等行业中,多种液体混合是必不可少的工序, 而且也是其生产过程中十分重要的组成部分。
基于PLC的液位控制系统研究毕业设计(论文)

毕业设计论文基于PLC的液位控制系统研究摘要本文设计了一种基于PLC的储罐液位控制系统。
它以一台S7-200系列的CPU224和一个模拟量扩展模块EM235进行液位检测和电动阀门开度调节。
系统主要实现的功能是恒液位PID控制和高低限报警。
本文的主要研究内容:控制系统方案的选择,系统硬件配置,PID算法介绍,系统建模及仿真和PLC编程实现。
本设计用PLC编程实现对储罐液位的控制,具有接线简单、编程容易,易于修改、维护方便等优点。
关键字:储罐;液位控制;仿真;PLCAbstractThis article is designed based on PLC, tank level control system. It takes a series s7-200 CPU224 and an analog quantities of EM235 expansion module to level detection and electric valve opening regulation.System main function is to achieve constant low level PID control and limiting alarm.The main contents of this paper: the choice of the control system plan, system hardware configuration, PID algorithm introduced, system modeling and simulation, and PLC programming. PLC programming with the design of the tank level control have the advantage of simple wiring, easy programming, easy to modify, easy maintenance and so on.Key word: tank ; level ;control ;simulation ;plc目录摘要 (I)ABSTRACT ........................................................... I I 1 绪论. (1)1.1盐酸储罐恒液位控制任务 (1)1.2本文研究的意义 (2)1.3本文研究的主要内容 (2)2 控制系统方案设计 (3)2.1储罐液位控制的发展及现状 (3)2.2系统功能分析 (3)2.3系统方案设计 (4)3 系统硬件配置 (5)3.1电动控制阀的选择 (5)3.1.1 控制阀的选择原则 (5)3.1.2 ZAJP 精小型电动单座调节阀性能和技术参数介绍 (10)3.2液位测量变送仪表的选择 (13)3.2.1 液位仪表的现状及发展趋势 (13)3.2.2 差压变送器的测量原理 (13)3.2.3 差压式液位变送器的选型原则 (14)3.2.4 DP系列LT型智能液位变送器产品介绍 (15)3.3PLC机型选择 (16)3.3.1 PLC历史及发展现状 (16)3.3.2 PLC机型的选择 (18)3.3.3 S7-200系列CPU224和EM235介绍 (20)4 PID算法原理及指令介绍 (21)4.1PID算法介绍 (22)4.2PID回路指令 (24)5 系统建模及仿真 (28)5.1系统建模 (28)5.2系统仿真 (30)5.2,1 MATLAB语言中Simulink交互式仿真环境简介 (30)5.2.2 系统仿真 (31)第6章系统编程实现 (33)6.1硬件设计 (33)6.1.1 绘制控制接线示意图 (33)6,1.2 I/O资源分配 (33)6.2软件设计 (34)6.2.1 STEP 7 Micro/Win V4.0 SP6编程软件介绍 (34)6.2.2 恒液位PID控制系统的PLC控制流程 (35)6.2.3 编写控制程序 (36)6.2.4 程序清单 (39)结束语 (40)参考文献 (41)致谢 (42)1 绪论1.1 盐酸储罐恒液位控制任务如图1.1所示为某化工厂稀盐酸储罐,该罐为钢衬聚四氟乙烯储罐,罐体高6米,容量为50立方米,重500千克。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科生毕业论文(设计)题目:基于智能仪表和PLC的液位控制系统设计院系:专业:学生姓名:学号:指导教师:(职称)摘要微电子技术和计算机技术的不断发展,引起了仪表结构的根本性变革,以微型计算机(单片机)为主体,将计算机技术和检测技术有机结合,组成新一代“智能化仪表”,在测量过程自动化、测量数据处理及功能多样化方面与传统仪表的常规测量电路相比较,取得了巨大进展。
智能仪表不仅能解决传统仪表不易或不能解决的问题,还能简化仪表电路,提高仪表的可靠性,更容易实现高精度、高性能、多功能的目的。
可编程控制器(Programmable Logic Controller---PLC)是一种应用广泛非常的自动控制装置,它将传统的继电器控制技术、计算机技术和通讯技术融为一体,具有控制能力强、操作灵活方便、可靠性高、适宜长期连续工作的特点,非常适合液位控制的要求。
本文介绍了基于智能仪表、西门子S7-300型可编程控制器(PLC)、组态软件的液位控制系统的设计方案。
系统采用PID算法,实现液位的自动控制。
利用组态软件设计人机界面,通过串行口和可编程控制器通信,实现控制系统的实时监控、现场数据的采集与处理。
实验证明,控制系统效果比较令人满意,具有较大的工程实用价值。
关键词:液位控制;智能仪表;可编程控制器;PID;人机界面AbstractNowadays intelligent measuring appliance is improving more and more quickly.It has been used in more an more place of our life.It can make Electric circuit much easier than before.And the control can be realized much more precise and convenient. Microelectronics and computer technology continues to develop, led to fundamental changes in the structure of instruments to micro-computer (single chip) as the main body, the computer technology and the organic integration of detection technology to form a new generation of "smart meters" in Measurement of process automation, measurement data processing and functional diversification of the traditional instrument, compared to conventional measuring circuit, tremendous progress has been made.PLC is a very useful control installment . It is widely used in a lot of control system in ourlives. It is the product of the computer,control,communication technology.It can make Electric circuit much easier than before.And the control can be realized much more precise and convenient.It very suits the control of water level. It will relay the traditional control technology, computer and communication technologies together with the control, and operation of flexible convenient, high reliability, suitable for continuous long-term characteristics of the work, very suitable for liquid level control requirements.This thesis mainly introduces a design of water level control system with intelligent measuring appliance,SIMATIC programmable logic controller (PLC) and configuration soft. This system adopts increment type Proportional-Integral-Differential arithmetic to realize the water level automation. For convenience to monitor the system and process data in actual time, we have designed Human Machine Interface(HMI)with configuration soft. The result of experimentation indicates that this system could run quickly, accurately and stably which accords with our aim perfectly.This system has been used widely in the temperature control system field for its low cost and high stabilization advantages.Experiment proved that the control system more satisfactory results, with more practical engineering value.Keywords: Water Level Control;Intelligent measuring appliance;PLC;PID;HMI目录摘要 (I)ABSTRACT (II)第一章前言 (1)1.1课题研究背景、意义和目的 (1)1.2液位控制系统的发展状况 (1)1.3论文研究内容 (2)第二章智能仪表与可编程控制器基础 (4)2.1智能仪表基础 (4)2.1.1 智能仪表的定义及发展现状 (4)2.1.2 智能仪表的功能 (4)2.1.3 智能仪表的基本组成 (4)2.2可编程控制器基础 (5)2.2.1 PLC的历史和发展趋势 (6)2.2.2 PLC的分类 (6)2.2.3 PLC的基本结构 (7)2.2.4 PLC的编程 (8)2.2.5 S7-300型PLC的特性 (8)第三章PID控制器设计 (10)3.1 PID控制器 (10)3.1.1 PID控制器的基本结构 (10)3.1.2 PID控制器各参数的作用 (11)3.1.3过程控制中常见PID参数整定方法 (12)3.1.4PID参数整定公式 (14)3.2 数学模型 (15)第四章控制系统设计 (18)4.1 硬件配置 (18)4.1.1 智能仪表 (18)4.1.2 PLC (19)4.1.3 检测装置 (20)4.1.4 执行机构 (20)4.2 控制流程 (21)4.2.1智能仪表控制 (21)4.2.2S7-300PLC控制 (22)4.3 PLC程序设计简介 (23)4.3.1 PID功能 (23)4.3.2 控制程序设计 (26)4.3.3程序总体结构 (27)4.4 STEP7编程界面简介 (28)4.5 MATLAB系统仿真 (30)第五章人机界面设计 (32)5.1组态软件简介 (32)5.2组态王人机界面开发 (33)5.2.1 组态王简介 (33)5.2.2 组态王特点 (33)5.2.3 组态王开发 (34)第六章系统运行结果 (43)第七章结论 (44)参考文献 (45)致谢 (46)第一章前言1.1课题研究背景、意义和目的在工业生产过程中,液位变量是最常见、最广泛的过程参数之一。
在石油工业、化工生产、电力工程、机械制造和食品加工等诸多领域中,人们都需要对各类流体的液位高度进行检测和控制.由于其具有工况复杂、参数多变、运行惯性大、控制滞后等特点,它对控制调节器要求极高。
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为液位控制的主要技术之一。
微电子技术和计算机技术的不断发展,引起了仪表结构的根本性变革,以微型计算机(单片机)为主体,将计算机技术和检测技术有机结合,组成新一代“智能化仪表”,在测量过程自动化、测量数据处理及功能多样化方面与传统仪表的常规测量电路相比较,取得了巨大进展。
智能仪表不仅能解决传统仪表不易或不能解决的问题,还能简化仪表电路,提高仪表的可靠性,更容易实现高精度、高性能、多功能的目的。
随着科学技术的进一步发展,仪表的智能化程度将越来越高,不但能完成多种物理量的精确显示,同时可以带变送输出、继电器控制输出、通讯、数据保持等多种功能。
可编程控制器(Programmable Logic Controller---PLC)是一种应用广泛非常的自动控制装置,它将传统的继电器控制技术、计算机技术和通讯技术融为一体,具有控制能力强、操作灵活方便、可靠性高、适宜长期连续工作的特点,非常适合液位控制的要求。
目前常用的可编程控制器中,西门子公司的S7-300PLC以其编程软件STEP7的简洁易用和通信网络的功能强大得到业内人士的普遍认可。
1.2液位控制系统的发展状况近几十年来,控制系统已被广泛使用,在起研究和发展上也已趋于完备,控制的概念更是应用在许多生活周遭的事物。
液位控制系统已是一般工业界所不可缺少的,举凡蓄水槽、污水处理厂等都需要液位元的控制。
使用液位控制系统来自动维持液位。