光电检测课程设计-激光测厚度
激光测厚仪测厚原理
激光测厚仪测厚原理激光测厚仪(Laser Thickness Gauge)是一种利用激光束测量物体厚度的设备。
该设备的应用领域非常广泛,包括机械、金属材料、化工、航空航天等各个领域,因此对于激光测厚仪的测厚原理进行深入的了解和研究显得尤为重要。
激光测厚仪测厚的原理激光测厚仪的测厚原理可以简述为:从激光器中发出的激光束经过透镜和狭缝后成为平行光束照射到被测物体表面,形成反射光,再经过接收器中的透镜后聚焦到光电转换器上。
根据光电转换器接收到反射光的强度大小,在经过AD 转换器后把数字信号送入计算机进行处理,然后便可以计算出被测物体的厚度值。
激光测厚仪测量的误差在进行激光测厚仪的测量过程中,往往会因为各种原因导致误差,影响测量的准确性。
针对这些误差,我们需要采取措施进行改善。
以下是几种常见的影响激光测厚仪精度的因素:光源干扰当被测物体表面和其他部位有不相同的反光度时,会对激光测厚仪的准确测量造成影响,出现误差。
因此,在测量过程中尽量选择较为平坦、光洁和光学性能稳定的被测物体,减少干扰。
基材或被测物体表面处理基材或被测物体表面的不同处理方式也可能影响激光测厚仪的测量结果。
如果表面不平滑,它将会使得反射光强度不均,导致测量趋于不稳定。
环境影响激光测厚仪测量的环境因素一定程度上会对其测量结果造成影响,例如温度、湿度等,因此测量时需要注意环境温度、湿度的变化,以及减少震动等外界因素对测量的影响。
因此,在使用激光测厚仪进行测量时,我们需要尽可能地保持被测物体表面的平滑和光学性能,消除外界因素对测量过程产生的影响,尽可能地确保测量结果的准确性。
结论激光测厚仪是一种高精度测量设备,它的原理简单明了,但是需要在使用的过程中尽量消除影响因素,确保测量结果的准确性。
激光测厚仪的应用范围广泛,可以在制造业、科研等多个领域中得到应用,为人们提供强有力的实验手段。
光电检测课程设计
光电检测课程设计一、课程目标知识目标:1. 让学生掌握光电检测的基本原理,理解光电效应、光电器件的工作原理及其在检测技术中的应用。
2. 使学生了解不同类型的光电传感器及其特性,能够分析其在实际工程中的应用场景。
3. 引导学生掌握光电检测系统的构建方法,学会进行简单的光电检测系统设计和分析。
技能目标:1. 培养学生运用光电传感器进行数据采集和处理的能力,提高实际操作技能。
2. 培养学生运用所学知识解决实际光电检测问题的能力,提高创新意识和实践能力。
3. 提高学生的团队协作能力,学会在团队中分工合作,共同完成项目任务。
情感态度价值观目标:1. 培养学生对光电检测技术的兴趣,激发学习热情,形成主动学习的态度。
2. 培养学生具有严谨的科学态度和良好的实验习惯,注重实验数据的真实性和准确性。
3. 引导学生关注光电检测技术在生产、生活和社会发展中的应用,认识光电检测技术对社会进步的重要性。
课程性质:本课程为高二年级物理选修课程,结合物理知识和实践操作,注重培养学生的实际应用能力。
学生特点:高二年级学生具有一定的物理基础,思维活跃,好奇心强,具备一定的自主学习能力。
教学要求:结合学生特点和课程性质,注重理论与实践相结合,通过项目式教学,提高学生的实际操作能力和解决问题的能力。
将课程目标分解为具体的学习成果,便于教学设计和评估。
二、教学内容1. 光电检测基本原理:光电效应、光电器件原理、光电传感器工作原理。
教材章节:第二章光电检测技术基础2. 光电传感器类型及特性:光敏二极管、光敏三极管、光电池、光电管、光电倍增管等。
教材章节:第三章光电器件及其特性3. 光电检测系统构建:系统设计原理、传感器选型、信号处理与分析、应用案例。
教材章节:第四章光电检测系统设计与应用4. 实践操作:光电传感器数据采集、处理与分析,实际应用场景下的检测项目实施。
教材章节:第五章实践操作与案例分析5. 创新设计:结合所学知识,开展小组项目,设计并实现一个简单的光电检测系统。
光电检测技术课程设计
光电检测技术 课程设计一、课程目标知识目标:1. 让学生掌握光电检测技术的基本原理,理解光电效应、光电器件的工作机制及其在检测中的应用;2. 使学生了解不同类型的光电传感器及其特点,能根据实际需求选择合适的光电传感器;3. 引导学生掌握光电检测系统中的信号处理方法,了解相关检测电路的设计与实现。
技能目标:1. 培养学生运用光电检测技术解决实际问题的能力,能进行简单的光电检测系统设计;2. 提高学生动手实践能力,能正确操作光电传感器及相关检测设备,进行数据采集和处理;3. 培养学生团队协作和沟通能力,能在小组合作中共同完成光电检测系统的设计与调试。
情感态度价值观目标:1. 培养学生对光电检测技术及其应用的兴趣,激发创新意识,提高学习积极性;2. 增强学生的环保意识,了解光电检测技术在环保、节能等领域的重要作用;3. 引导学生树立正确的价值观,认识到光电检测技术在国家经济发展和国防建设中的地位和作用。
课程性质:本课程为高二年级物理选修课程,结合物理知识和实际应用,注重理论与实践相结合。
学生特点:高二学生在物理知识方面具备一定基础,具有较强的逻辑思维能力和动手实践能力,对新技术和新设备充满好奇心。
教学要求:结合学生特点,注重启发式教学,提高学生的主动学习能力;注重实践操作,培养学生的实际操作能力和问题解决能力。
通过本课程的学习,使学生能够将光电检测技术应用于实际生活和工作中,为我国光电产业的发展做出贡献。
二、教学内容1. 光电检测技术基本原理- 光电效应(光电导效应、光伏效应、光生伏特效应)- 光电器件(光敏二极管、光敏三极管、光电管、光电耦合器)2. 光电传感器及其应用- 不同类型的光电传感器(环境光传感器、位置传感器、转速传感器等)- 光电传感器的选型与应用3. 光电检测系统设计- 信号处理方法(模拟信号处理、数字信号处理)- 检测电路设计与实现(放大电路、滤波电路、信号转换电路等)4. 实践操作与案例分析- 光电传感器操作与调试- 光电检测系统设计实例分析- 小组项目:设计并实现一个简易的光电检测系统教学大纲安排:第一周:光电检测技术基本原理学习,了解光电器件的工作机制;第二周:学习光电传感器及其应用,进行光电传感器选型分析;第三周:学习光电检测系统设计,掌握信号处理方法和检测电路设计;第四周:实践操作与案例分析,小组项目设计与实施;第五周:项目展示与评价,总结课程学习成果。
红外激光测量硅片的折射率和厚度
请将电子版打印出来,仔细阅读,不懂之处用笔标记上,这样才算写了预习报告。
老师将根据认真程度给预习分红外激光测量硅片的折射率和厚度实验类型:近代光学设计性实验实验地点:实训中心2号楼1楼2123教室实验日期:第9-12周(第一轮),每周 (例如周五)节次 (例如34节) 学生姓名: 学号: 手机号: Email:一.目的要求用光波导法测量硅片的折射率和厚度。
实验要求达到:1、了解Au-Si-Au 三层平板波导结构,理解导模的激发原理2、掌握导模测量的衰减全反射实验方法3、计算硅片的折射率和厚度二.仪器设备光纤激光器、小孔、Au-Si-Au 波导、ω-2ω转台、红外光电探测器、红外激光显示卡、电脑、电路控制箱。
三.原理本实验采用光波导法测量硅片的折射率和厚度。
将硅片的两个表面分别镀上20纳米与200纳米厚的金膜,制作成Au-Si-Au 双面金属包覆波导。
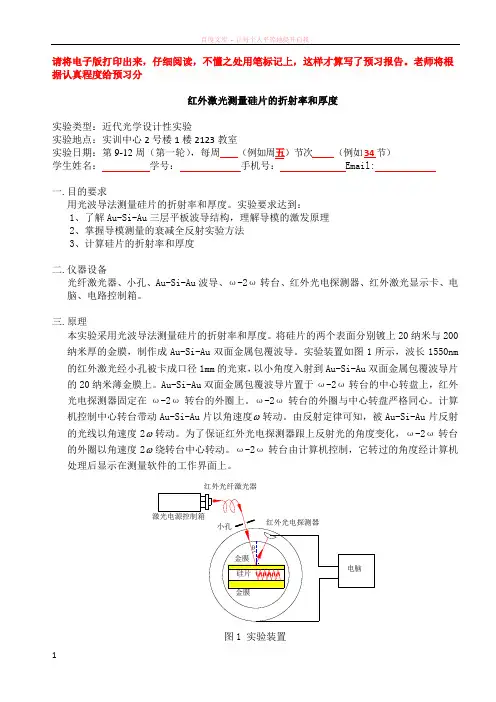
实验装置如图1所示,波长1550nm 的红外激光经小孔被卡成口径1mm 的光束,以小角度入射到Au-Si-Au 双面金属包覆波导片的20纳米薄金膜上。
Au-Si-Au 双面金属包覆波导片置于ω-2ω转台的中心转盘上,红外光电探测器固定在ω-2ω转台的外圈上。
ω-2ω转台的外圈与中心转盘严格同心。
计算机控制中心转台带动Au-Si-Au 片以角速度ω转动。
由反射定律可知,被Au-Si-Au 片反射的光线以角速度2ω转动。
为了保证红外光电探测器跟上反射光的角度变化,ω-2ω转台的外圈以角速度2ω绕转台中心转动。
ω-2ω转台由计算机控制,它转过的角度经计算机处理后显示在测量软件的工作界面上。
硅片金膜金膜小孔红外光纤激光器红外光电探测器电脑激光电源控制箱θ图1 实验装置当激光的入射角为某些特定的角度时,激光在水平方向的波矢与导模的传播常数相匹配,激光的能量便会耦合进硅片,在硅片中激发出一系列导模,反射光的强度骤然减弱。
用红外光电探测器测量反射光的强度,探测到的信号电压一般为几个毫伏,将这个信号经模拟放大电路放大,再通过A/D转换成数字信号传送给电脑处理。
光电检测课程设计-激光测厚度
《光电检测课程设计》 2016 年 12 月目录摘要 (3)1绪论 (4)1.1课题研究的意义 (4)1.2国内外现状 (4)2视觉测量系统 (5)2.1直射型激光三角法测位移原理 (5)2.2双光路激光三角法测厚原理 (6)2.3测厚原理及特点 (6)2.4光路系统特点 (8)3图像处理部分 (9)3.1图像预处理 (9)3.2阈值的确定 (10)3.3厚度的确定 (10)4结论 (12)参考文献 (13)摘要:精确测量薄板类材料的厚度,讨论了激光器光束轴心线与成像透镜光轴夹角与系统分辨率的关系,并基于最小二乘法拟合得出了光斑距离与被测物厚度的函数关系式,最后通过标定实验对系统精度进行了实验论证。
结果表明,该系统消除了双光路激光三角法上下测量系统难以同步的问题,分辨率高,精度控制在 10μm,良好地满足了工业测量的需求。
关键词:激光三角法最小二乘法薄板厚度1.绪论:1.1课题研究的意义随着材料加工技术的发展和测试计量技术水平的提高,材料厚度的检测对仪器测量精度提出了更高的要求,同时也由在线测量逐步取代离线机械式测量。
冷轧钢板作为汽车制造、机械加工、船舶制造、土木建筑和轻工业等领域的原材料具有广泛的用途,热镀锌工艺常用来进行钢板的防锈处理,据统计,全球每年产锌量大约一半被用在于钢板防锈处理上,因而,镀锌板厚度的高精度检测关系到镀锌工艺的优化和锌层用量的合理规划。
针对镀锌板厚度高精度在线检测问题,提出了一种单镜头双光路激光三角测厚模型,该模型相对传统双光路激光三角测厚法而言,通过改进光路设计将分置于上下两条光路中的光电探测器合二为一,避免了两条独立光路中图像探测器难以同步工作的问题,使得测量结果不受被测物抖动的影响.激光测厚的优势在于不接触被测物且测量精度高,可解决一些以往难以解决的问题,因此在实际应用中受到广泛青睐.激光三角法在线厚度测量通常都在C型机架上进行,而C型机架在大震动环境里自身难以避免震动,这导致上、下两组测量探头相对位置发生变化,产生测量误差.目前消除震动的方法有:震动隔离、震动补偿[1]等,其中震动隔离方法硬件设计较复杂,且不能消除C型机架自身震动[1];传统的震动补偿法不能满足上、下探头测量数据与C型机架微位移变化厚度补偿数据的同步性.因此,仍不能很好地满足在线动态高精度测量的要求.1.2国内外现状现在,世界上激光三角法薄板在线测厚过程存在两个典型的问题:(1)被测工件在工件传输线上向前运动时伴有沿着激光束方向的前后轻微跳动;(2)C型机架在大震动环境里自身震动,这些问题会引起测量误差.对此,提出了三同步激光三角法厚度测量方法.该法利用CCD同步驱动技术[2],在同一时刻采集3组测量探头数据,其中,上、下两组测量探头对被测物体厚度进行测量;第3组对C型机架微位移变化实时监测,进而对上、下两路测量探头所测厚度进行补偿.这3组数据保证了严格的同步,从而有效地提高了测量精度.2.工作原理2.1直射型激光三角法测位移原理直射型激光三角法光路示意图如图 1 所示。
光电检测技术课程设计2则
光电检测技术课程设计2则以下是网友分享的关于光电检测技术课程设计的资料2篇,希望对您有所帮助,就爱阅读感谢您的支持。
光电检测技术课程设计(1)目录应用物理学专业课程设计(论文)管理细则........................................ 1 课程设计报告模版................................................................................. 5 应用物理学专业课程设计报告撰写要求............................................. 5 应用物理学专业课程设计报告撰写格式............................................. 7 应用物理学专业课程设计(论文)成绩评定标准 (12)应用物理学专业课程设计(论文)管理细则课程设计是重要的实践教学环节。
它是根据教学计划的要求,在教师指导下对学生进行的阶段性基础或专业技能的训练,是对前期理论与实践教学效果的检验,是对学生综合分析能力与独立工作能力的培养过程。
为做好课程设计教学工作,特制定本实施细则。
一、课程设计的目的意义1、课程设计的目的是进一步巩固和加深学生所学的专业理论知识,培养学生设计、计算、绘图、计算机应用、文献查阅、实验研究、报告撰写等基本技能。
2、培养学生独立分析和解决工程实际问题的能力。
3、培养学生的团队协作精神、创新意识、严肃认真的治学态度和严谨求实的工作作风。
二、组织管理及主要工作职责课程设计由教研室负责具体实施。
1、教研室(专业负责人)工作职责(1)根据本专业培养目标制定相应的课程设计大纲。
(2)负责审核课程设计题目、课程设计任务书等。
(3)负责落实课程设计任务,安排指导教师(包括选聘校内外指导教师)。
(4)负责对本教研室课程设计质量的监控。
(5)负责做好课程设计资料的归档工作。
用激光检测涂层厚度
:
密 度 。和
比 热 ) 和一 种仪 器 参数 ( 激 光 的 调 制频 率动
黑…
P 翎 泌 明 还
`
0 .
.
…
. 公心 . . . 0.
二
!
…
、二
点
的影 响
公
3 0
一
.
… …必 …
.
ó 侧 蛆
!
距离
s
一
0 1 之
,
3
`
渗 人 深度
扣
一
图
1
对漆层 表面 进 行光 电热 敏法检侧
,
导热 材料 中热 波幅 值 的 深度 曲线
,
。
如 果在
。
示
,
就 必需 进行 校 正
2
.
。
则 有一 部 分 渗 人 的 这部
热 波 将 被 涂 料 / 基 体材 料 的 界 面 反 射 掉
。
检 测 方法 和 测 量 装 置
。
分 不 仅对 幅 值 而且对 温 度 振 荡 的 相 位 都提 供 了 可 测 得 的量值
检测 热 波 已 有各 种不 同 的方 法 其 中的二 种
,
这样
。
而且是 A T
,
1
/了 。
。
因 为在 恒定 的占空
1
:
并 为 通过
用光
,
因数 时
( 通 常是 即 照 射 的 间歇 时 ’ l e d
, ,
1 )
,
统 计 分 析估 算 出其 使 用 寿 命提 供 了 依 据 电热 敏 法还 能 明 显 看 出材 料 中的杂 质 样 上不 会有 机 械作 用
激光检测钢板厚度的方法
激光检测钢板厚度的方法激光技术在工业领域中有着广泛应用,其中激光检测钢板厚度是其重要应用之一。
下面将详细介绍激光检测钢板厚度的方法。
激光检测钢板厚度的方法主要有两种:一是通过测量激光光路来确定钢板厚度,二是通过激光的干涉现象来获取钢板厚度。
第一种方法是通过测量激光光路来确定钢板厚度。
该方法主要利用激光束从钢板的一侧发出,经过钢板后被探测器接收到。
通过测量激光的入射角度、偏转角度和探测光路长度等参数,可以确定钢板的厚度。
具体实现时,可以使用光学传感器、探测器和信号处理设备等来实现对激光光路的测量和处理。
这种方法通常适用于钢板比较薄且平整的情况下。
第二种方法是通过激光的干涉现象来获取钢板厚度。
该方法主要利用光的干涉现象,即当两束光相遇时会产生干涉现象。
在激光检测钢板厚度时,可以将激光束分为两束,一束经过钢板的一侧发出,另一束经过钢板的另一侧发出。
当这两束激光束在钢板的中间相遇时,会产生干涉现象。
通过观察干涉图像的变化,可以确定钢板的厚度。
这种方法需要使用干涉仪等设备来观察和处理干涉图像,具有较高的精度和灵敏度。
适用于对钢板厚度要求较高的情况。
激光检测钢板厚度的方法在实际应用中还可以综合使用,根据具体情况来选择合适的方法。
此外,还需要注意以下几点来提高激光检测钢板厚度的精度和可靠性:1. 激光的选择和调整:选择合适波长、功率和模式的激光器,保证激光的稳定性和一致性。
同时,通过合适的调整和对准激光束,确保激光能够准确穿过钢板。
2. 探测器的选型和校准:选择合适的探测器来接收激光的反射信号,校准探测器的灵敏度和响应特性,以确保可以准确测量激光的光强和相位。
3. 环境的控制和干扰的排除:控制好激光检测的环境条件,避免外界光源和干扰物对激光检测的影响,保证测量的准确性和稳定性。
4. 信号处理和数据分析:通过合适的信号处理和数据分析方法,提取出钢板厚度的信号,并进行有效的数据处理和分析,得到最终的钢板厚度结果。
激光测厚原理
激光测厚原理
激光测厚是一种非接触式测量物体厚度的技术。
激光测厚的原理基于激光的光路偏移量与物体厚度之间的关系。
首先,激光器发射出一束准直、单色、相干的激光束。
然后,激光束通过一个光学系统,如镜头或透镜,聚焦到被测物体上。
激光束与物体表面发生反射,形成反射光束。
接下来,反射光束经过光电探测器接收到。
激光光束经过探测器后会产生光电信号。
根据光电信号的强度和时间延迟,可以计算出光路偏移量。
光路偏移量与物体表面到激光器的距离成正比,从而可推算出物体的厚度。
在测量过程中,需要先对测距装置进行校准,以获取准确的测量结果。
校准时,将测距装置对准一个已知厚度的标准样品,通过测量标准样品的厚度,与测量结果进行比较,进行误差修正。
激光测厚具有高精度、快速测量、无损测量等优点。
它被广泛应用于各个领域,例如材料科学、制造业、航空航天等。
激光测厚原理
激光测厚原理
激光测厚是利用激光束的干涉原理来测量物体的厚度。
其原理如下:
1. 激光干涉:激光器发出一束单色、相干的激光束,经过分束器分成两束光,一束通过参考器件直射到光敏器件上,另一束经过待测物体后再射到光敏器件上。
2. 干涉条纹:由于两道光波的干涉,会在光敏器件上形成一系列亮暗相间的干涉条纹,其亮暗程度与待测物体的厚度有关。
3. 干涉条纹分析:通过光敏器件上的干涉条纹,可以确定待测物体的透明度和厚度。
光敏器件可以是摄像头或光电二极管等。
4. 数据处理:利用图像处理算法,可以将光敏器件上的干涉条纹转换成数字信号,并进行图像处理和数据分析。
5. 厚度计算:根据干涉条纹的亮暗程度,可以计算出待测物体的厚度。
这通常需要参考标准样本或者校准曲线来进行校准。
激光测厚原理基于激光的高亮度、方向性和单色性,能够精确测量各种材料的厚度,广泛应用于工业、科研和医疗领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《光电检测课程设计》 2016 年 12 月目录摘要 (3)1绪论 (4)1.1课题研究的意义 (4)1.2国内外现状 (4)2视觉测量系统 (5)2.1直射型激光三角法测位移原理 (5)2.2双光路激光三角法测厚原理 (6)2.3测厚原理及特点 (6)2.4光路系统特点 (8)3图像处理部分 (9)3.1图像预处理 (9)3.2阈值的确定 (10)3.3厚度的确定 (10)4结论 (12)参考文献 (13)摘要:精确测量薄板类材料的厚度,讨论了激光器光束轴心线与成像透镜光轴夹角与系统分辨率的关系,并基于最小二乘法拟合得出了光斑距离与被测物厚度的函数关系式,最后通过标定实验对系统精度进行了实验论证。
结果表明,该系统消除了双光路激光三角法上下测量系统难以同步的问题,分辨率高,精度控制在 10μm,良好地满足了工业测量的需求。
关键词:激光三角法最小二乘法薄板厚度1.绪论:1.1课题研究的意义随着材料加工技术的发展和测试计量技术水平的提高,材料厚度的检测对仪器测量精度提出了更高的要求,同时也由在线测量逐步取代离线机械式测量。
冷轧钢板作为汽车制造、机械加工、船舶制造、土木建筑和轻工业等领域的原材料具有广泛的用途,热镀锌工艺常用来进行钢板的防锈处理,据统计,全球每年产锌量大约一半被用在于钢板防锈处理上,因而,镀锌板厚度的高精度检测关系到镀锌工艺的优化和锌层用量的合理规划。
针对镀锌板厚度高精度在线检测问题,提出了一种单镜头双光路激光三角测厚模型,该模型相对传统双光路激光三角测厚法而言,通过改进光路设计将分置于上下两条光路中的光电探测器合二为一,避免了两条独立光路中图像探测器难以同步工作的问题,使得测量结果不受被测物抖动的影响.激光测厚的优势在于不接触被测物且测量精度高,可解决一些以往难以解决的问题,因此在实际应用中受到广泛青睐.激光三角法在线厚度测量通常都在C型机架上进行,而C型机架在大震动环境里自身难以避免震动,这导致上、下两组测量探头相对位置发生变化,产生测量误差.目前消除震动的方法有:震动隔离、震动补偿[1]等,其中震动隔离方法硬件设计较复杂,且不能消除C型机架自身震动[1];传统的震动补偿法不能满足上、下探头测量数据与C型机架微位移变化厚度补偿数据的同步性.因此,仍不能很好地满足在线动态高精度测量的要求.1.2国内外现状现在,世界上激光三角法薄板在线测厚过程存在两个典型的问题:(1)被测工件在工件传输线上向前运动时伴有沿着激光束方向的前后轻微跳动;(2)C型机架在大震动环境里自身震动,这些问题会引起测量误差.对此,提出了三同步激光三角法厚度测量方法.该法利用CCD同步驱动技术[2],在同一时刻采集3组测量探头数据,其中,上、下两组测量探头对被测物体厚度进行测量;第3组对C型机架微位移变化实时监测,进而对上、下两路测量探头所测厚度进行补偿.这3组数据保证了严格的同步,从而有效地提高了测量精度.2.工作原理2.1直射型激光三角法测位移原理直射型激光三角法光路示意图如图 1 所示。
激光器、成像透镜和图像探测器三者位置关系满足 Sche-impflug 成像条件 。
处于铅垂线方向的激光器发出的光线聚焦到被测物上表面后,漫反射光线经过成像透镜后汇聚在图像探测器上,当被测物从图示标定平面移动 H 距离达到标定平面上方某一位置时,图像探测器上的光斑会相应移动 H1 的距离,二者之间的函数关系式可由相似三角形关系推导出: γγααcos d sin cos d sin 1011H H H H ∆+∆=∆-∆ (1)式中,α 为激光器光束轴心线与成像透镜光轴的夹角;γ 为图像探测器感光面所在的平面与成像透镜光轴的夹角; d1 为成像透镜光轴上的等效物距; d0 为成像透镜光轴上的等效像距; H 为被测物表面移动距离;H1 为图像探测器感光面上光斑移动距离。
Fig . 1 Schemes of perpendicular laser triangulation整理可得,当图像探测器上光斑移动 H1 距离时,被测物表面移动距离 H 的表达式为:11110cos sin cos sin sin d sin d H H H H ∆⨯∆-∆-=∆γααγγα (2) 通过图像处理得到图像探测器上光斑移动距离 H1的值,即可求出被测物的真实位移值。
2.2双光路激光三角法测厚原理双光路激光三角法测厚度的光路示意图如图 2 所示。
Fig . 2 Schemes of double laser triangulation其光路结构可视为由两个上下对称布置的直射型激光三角法光路组成,被测物的上下表面可看作两个相对参考平面,分别移动的距离为 H1 和 H2 ,其厚度表达式为: H = H1 + H2 ,由前面所述知识及公式推导可得:111101cos sin cos sin sin d sin d H H H H ∆⨯∆-∆-=γααγγα (3) 222102cos sin cos sin sin d sin d H H H H ∆⨯∆-∆-=γααγγα (4) 式中1H ∆和2H ∆分别为1H 和2H 对应的光斑移动距离,此时被测物厚度表达式为:2221011110cos sin cos sin sin d sin d cos sin cos sin sin d sin d H H H H H H H ∆⨯∆-∆-+∆⨯∆-∆-=γααγγαγααγγα(5)2. 3 测厚原理及特点由几何光学知识可知,光学系统近轴区内可视为理想光学系统,在近轴区内,理想光学系统的垂轴放大率 β 定义为像的大小与物体的大小之比。
图 3 为本测量系统等效光路图。
图 4 为理想光学系统成像示意图。
如图 4 所示,被测物上下表面的光斑可分别视为相对于参考平面上方和下方高度为 h1 和 h2 的两个物体,在成像透镜后方所成像的像高分别为 h1 和 h2 ,有:即为图像探测器感光面上下两光斑之间的距离Fig . 3 Schemes of light pathFig . 4 Schemes of ideal optical imaging system图 5 是光路示意图的斜二轴测图。
在图 5 中,上下激光器分别发射 1 束光束经激光器前端透镜聚焦到被测物上下表面形成两个光斑,漫反射光线通过组合透镜汇聚到图像探测器感光面上形成两个成像光斑。
Fig . 5 Cabnet drawing of light path schemes 由前述推导可知,被测物上下表面两光斑的间距与图像探测器感光面上的两成像光斑的间距成线性关系,通过图像处理提取两成像光斑的重心,并计算重心之间的距离,对测量系统进行标定后,便可计算出膜上下光斑之间的距离。
膜上下两光斑的距离即认定为被测物的厚度。
图 6 为测量方式示意图。
测量位置选择传送装置的滚轮附近,因为滚轮附近被测物晃动较小,因晃动造成的物面倾斜角度也较小,物面倾斜带来的误差也较小。
测厚设备可采用手持的方式也可固定在某一测量位置,沿板材的宽度方向移动 U 型架可实现板材厚度沿宽度方向的厚度测量。
Fig . 6 Schemes of measuring mode通过改进双光路激光三角法光路结构,优化光路设计,将双光路激光三角法中的上下透镜和图像探测器合合二为一,测量系统的上下光路采用同一光学系统和成像系统,通过图像处理设备同时抓取上下光斑图像并实时处理,很好地保证了上下光路中图像采集和处理的同步性,既消除了双光路中上下独立测量系统难以同步的问题,又减小了结构尺寸,减轻了设备重量。
2.4 光路系统特点要获得较大的分辨率,可选用像元尺寸小的高分辨率 CCD ,这大大增加了成本。
由前述直射型激光三角法测位移原理分析及公式推导可知,(2) 式两边同时对 H 求导即可得到直射型激光三角法的分辨力表达式:11021sin sin )cos sin cos sin sin (H d d H H d H ∆⨯∆-∆-=∆γαγααγγ (6) 整理得:11021sin sin )sin sin (H d d H d H ∆⨯+∆-=∆γαγαγ)( (7) 此时1H ∆表示为CCD 的像元尺寸,分析上式可知,当γ 一定时,α越大,分子变小同时分母变大,H 前面的系数就变小,H 的值也变小,也就是说分辨率变高了; 反之,γ一定时,α越小,分辨率越低。
本系统中α设计角度接近 90°,系统分辨率较双光路激光三角法更大。
由光路的可逆性和折射定律、反射定律中光线方向的确定性,可得出每一个物点对应唯一的一个像点,也就是说CCD 的位置是唯一的,由于散斑效应,当被测物很薄时,图像探测器上的两光斑间距将很小甚至彼此相连,难以得到两光斑中心的距离,本系统中,通过在孔径光阑后方加入一片平面玻璃,用来改变光线传播方向,入射光束进入平面玻璃内部发生折射后沿平行于入射方向继续传播,当平面玻璃呈一定角度放置时,出射点的位置向平面玻璃边沿方向发生移动,这样,CCD 像面上的成像光斑也同方向的随之移动一定距离,如图 7 所示。
这样就扩大了成像光斑的距离,使系统对于很薄的被测物也能得到两个彼此分离的光斑。
Fig . 7 Schemes of image deflection3.图像处理部分3.1 图像预处理图像探测器采用北京微视新纪元有限公司生产的型号为 MVC3000F 的 CCD 。
像元尺寸为 3. 2μm ×3.2μm ,采集幅面为 2048 × 1536。
选用华科激光型号为DD635-1-3 的半导体激光器为光源,其光斑直径在焦平面处最小尺寸为 0. 15mm ,1∶1 成像后成像光斑最大宽度约为 45 个像元尺寸大小。
为提高处理速度,相机采集幅面截取为 2048 × 768。
采集到 1 幅图片后,首先利用阈值法确定是否有光斑存在,若存在且为两个光斑则将灰度值按列方向进行投影,找到峰值对应的横坐标,截取峰值横坐标左右一定区域作为光斑目标区域进行找中心处理。
为降低背景噪声的影响,对目标区域进行均值滤波处理,消除孤立噪声点的影响,同时通过阈值分割将目标区域的背景灰度置为 0,减小背景灰度对光斑找中心的影响,然后利用重心法求取两光斑中心并计算两光斑间距。
图像处理流程图如图 8 所示。
Fig . 8 Image processing flow chart3. 2 阈值的确定阈值分割是对灰度图像选取一个合适的阈值,以确定每一个像素点是属于目标区域还是背景区域。
常用的阈值计算法有直方图法、Ostu 法、最小误差法、均匀化误差法、最大熵法和概率松弛法 等。
本系统采用阈值分割法进行图像预处理,选取原点处长宽为100 × 100 个像元大小的区域灰度平均值作为阈值 2990j 990100),(f ∑∑===j i T i f (i ,j )为(i ,j )点的灰度值。