数字滤波器的结构.
合集下载
数字滤波器的基本结构(3)-sw_OK
8
5.2 无限长单位冲激响应(IIR)滤波器 的基本结构
一、直接I型
表述一个IIR滤波器的系统函数和差分方程分别 由(5-1)和(5-2)式表述,
M
N
y(n) bk x(n k) ak y(n k)
k 0
k 1
(5-2)
根据(5-2)式可以看出,y(n)可以分为两部分之和
M
第一部分为 bk x(n k) 对应输入x(n)及其各延迟 k 0
(2)将输入x(n)和输出y(n)互换位置。
18
5.2 无限长单位冲激响应(IIR)滤波器 的基本结构
x(n)
b0
b1
z 1 a1
b2
z 1 a2
y(n)
bM 1
bM
z 1
aN 1
z 1
aN
图8 直接 II 型的转置型
19
5.2 无限长单位冲激响应(IIR)滤波器 的基本结构
[例 1]设IIR数字滤波器的系统函数为
图6可以看作是图5的极点网络和零点网络互换级联 位置而成的。
观察图6
∵w1=w2 ∴前后两部分对应的延迟支路输出节点变量 也相等,即图中的w1(n-1)=w2(n-1),w1(n-i)=w2(n-i),
故可将前后两部分对应的延迟支路合并,合并后的信 号流图为
15
5.2 无限长单位冲激响应(IIR)滤波器 的基本结构
H (z) 8z3 4z2 11z 2
(z 1)(z2 z 1)
4
2
试画出该IIR数字滤波器的直接II型及其转置型的结构。
8 4z1 11z2 2z3 解: H (z) 1 5 z1 3 z2 1 z3
448
20
5.2 无限长单位冲激响应(IIR)滤波器 的基本结构
5.2 无限长单位冲激响应(IIR)滤波器 的基本结构
一、直接I型
表述一个IIR滤波器的系统函数和差分方程分别 由(5-1)和(5-2)式表述,
M
N
y(n) bk x(n k) ak y(n k)
k 0
k 1
(5-2)
根据(5-2)式可以看出,y(n)可以分为两部分之和
M
第一部分为 bk x(n k) 对应输入x(n)及其各延迟 k 0
(2)将输入x(n)和输出y(n)互换位置。
18
5.2 无限长单位冲激响应(IIR)滤波器 的基本结构
x(n)
b0
b1
z 1 a1
b2
z 1 a2
y(n)
bM 1
bM
z 1
aN 1
z 1
aN
图8 直接 II 型的转置型
19
5.2 无限长单位冲激响应(IIR)滤波器 的基本结构
[例 1]设IIR数字滤波器的系统函数为
图6可以看作是图5的极点网络和零点网络互换级联 位置而成的。
观察图6
∵w1=w2 ∴前后两部分对应的延迟支路输出节点变量 也相等,即图中的w1(n-1)=w2(n-1),w1(n-i)=w2(n-i),
故可将前后两部分对应的延迟支路合并,合并后的信 号流图为
15
5.2 无限长单位冲激响应(IIR)滤波器 的基本结构
H (z) 8z3 4z2 11z 2
(z 1)(z2 z 1)
4
2
试画出该IIR数字滤波器的直接II型及其转置型的结构。
8 4z1 11z2 2z3 解: H (z) 1 5 z1 3 z2 1 z3
448
20
5.2 无限长单位冲激响应(IIR)滤波器 的基本结构
数字滤波器的基本结构
H (z)
A
m1 N1
m1 N2
(1 ck z1) (11k z1 2k z2 )
k 1
k 1
将单实根因子看作二阶因子的特例:
46
M 1 2
(1 1m z1 2m z2 )
H (z) A m1 N 1 2 (1 1k z1 2k z2 ) k 1
:表示取整。
其中
Hi
(z)
1 1i z1 11i z1
2i 2i
z 2 z 2
,
级联结构:
i 0,1,..., m
X(n) H1(Z)
H2(Z)
。。。
Y(n) Hm(Z)
48
H(Z)的实现结构即可表示为基本二阶节 的级联形式。每个二阶节用典范型实现:
Z-1
Z 1 a1
y(n 1)
Z 1
a2
y(n 2)
Z 1 bM
x(n M )
Z 1
aN 1
y(n N 1)
Z 1
aN
y(n N)
实现N阶差分方程的直接I型结构
36
M=N
37
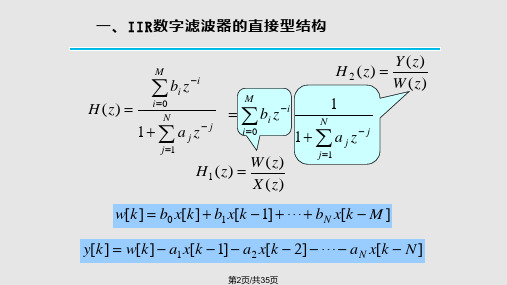
1)可直接差分方程或系统函数的标准形式画 出。两个网络级联:第一个横向结构M节延 时网络实现零点(分子,输入),第二个有 反馈的N节延时网络实现极点(分母,输 出) 。需要N+M级延时单元。
32
◦ 系统函数 ◦ 差分方程
M
bk z k
H(z)
k 0 N
1 ak zk
Y (z) X (z)
k 1
N
M
y(n) ak y(n k) bk x(n k)
数字信号处理 第五章
+ a2 z-1
数字信号处理—第五章
6
举例:二阶数字滤波器
y ( n ) a 1 y ( n 1) a 2 y ( n 2 ) b 0 x ( n )
x(n) b0 +
-1 a1 z
y(n)
+ a2 z-1
数字信号处理—第五章
7
举例:二阶数字滤波器
y ( n ) a 1 y ( n 1) a 2 y ( n 2 ) b 0 x ( n )
z z
2 2
H (z)
1 1k z 1 1k z
1 1
x(n)
H 1(z)
y (n )
H 2(z)
H k (z)
数字信号处理—第五章
22
数字信号处理—第五章
23
IIR数字滤波器的级联型结构优点
1) 每个二阶或一阶子系统单独控制零、极点。 2)级联顺序可交换,零、极点对搭配任意,因此级联 结构不唯一。有限字长对各结构的影响是不一样的, 可通过计算机仿真确定子系统的组合及排序。 3)级联各节之间要有电平的放大和缩小,以使变量值 不会太大或太小。太大可能导致运算溢出;太小可 能导致信噪比太小。 4)级联系统也属于最少延时单元实现,需要最少的存 储器,但乘法次数明显比直接型要多。 4)级联结构中后面的网络输出不会再流到前面,运算 误差积累比直接型小。
数字信号处理—第五章
4
基本单元(数字滤波器结构)有两种表 示方法
数字信号处理—第五章
5
举例:二阶数字滤波器
y ( n ) a 1 y ( n 1) a 2 y ( n 2 ) b 0 x ( n )
x(n) b0 +
数字滤波器的基本结构

未来研究方向
新型算法研究
针对实际应用中的挑战,未来研究将进一步探索新型的数字滤波器 算法,以提高其性能、稳定性和适应性。
高性能硬件实现
随着集成电路和计算机工程的发展,未来研究将进一步探索高性能 、低功耗的数字滤波器硬件实现方法。
跨领域应用
数字滤波器在许多领域都有广泛的应用前景,如医疗、航空航天、环 保等,未来研究将进一步拓展数字滤波器的应用领域。
梯度下降法
通过迭代地更新滤波器的 系数,使得误差的梯度下 降最快,从而逐渐逼近最 优解。
牛顿法
利用牛顿定理,通过迭代 来寻找最优解,具有较高 的收敛速度和精度。
最优滤波器设计
最小均方误差(MMSE)滤波器
以最小化输出信号与期望信号之间的均方误差为优化目标,设计最优的滤波器 。
卡尔曼滤波器
一种递归滤波器,通过预测和更新来估计系统的状态,具有较高的稳定性和精 度。
控制系统
数字滤波器可以用于控制系统 的处理,如伺服控制、PID控制
、卡尔曼滤波等。
02
CHAPTER
数字滤波器的基本结构
数字滤波器的基本结构 直接形式
直接形式是数字滤波器的基本结构之 一。它是一种直观的形式,由一个输 入和一个输出组成,输入信号经过一 个或多个线性时不变系统后得到输出 信号。直接形式的结构简单,易于理 解和实现。
硬件优化
随着集成电路和计算机工程的发展,数字滤波器的硬件实 现越来越高效,低功耗、高速度和小型化成为主要趋势。
软件算法改进
数字滤波器的算法不断优化,以适应更复杂和多变的应用 场景,如神经网络、深度学习等算法的引入使得滤波效果 更加精确。
嵌入式应用
随着嵌入式系统的发展,数字滤波器在嵌入式设备上的应 用越来越广泛,这要求数字滤波器具有更强的稳定性和适 应性。
数字滤波器的基本结构ya

三、转置定理 如果将原网络中所有支路方向加以倒转,且将输入 和输出交换其系统函数仍不改变。
x(n)
a1
bb Z1 0 1
a2
b Z1 2
y(n)
bM1
a Z1
N1 bM
aN
Z1
(原网络)
y(n)
b0
b a1
Z1
1
a2
b Z1 2
bM1
x(n)
aN1
aN
b Z1 M
Z1
(转置后的网络)
5.3 FIR滤波器的基本结构
x(n) h(n) y(n)
y(n) x(n) h(n)
进行傅氏变换得:
Y (e j) X (e j) H (e j)
这种关系可用差分方程、单位冲激响应及系统函数进行描述。
X (e j )
0
H (e j )
0
Y(e j )
0
H(ejω)为矩形窗时 的情形
ωc
πω
ωc
πω
ω
πω
二、数字滤波器的系统函数与差分方程
a)输入节点或源节点x,(n) b)输出节点或阱 节点y(,n)
所处的节点; 所处的节点;
c)分支节点,一个输入,一个或一个以上输 出的节点;将值分配到每一支路;
d)相加器(节点)或和点,有两个或两个以 上输入的节点。
支路不标传输系数时,就认为其传输系数为1;
任何一节点值等于所有输入支路的信号之和。
y(n) a1 y(n 1) a2 y(n 2) b0 x(n)
x(n) b0
y(n)
b0x(n) a2 y(n 2)
Z 1
a1
a1y(n 1) Z 1
y(n 1)
数字信号处理第四章-数字滤波器的结构
3).H (z)
Y (z) X (z)
(1 bz1) (1 az1)
y(n) ay(n 1) x(n) bx(n 1)
9
10
11
w w
12
转置流图:
w(n) y(n)
原流图:
w(n) ay(n 1) x(n) bx(n 1) 两边作Z变换:
w(n) x(n) aw(n 1) y(n) w(n) bw(n 1) 两边作Z变换:
乘法系数为复数,运算量增加; 系统的稳定性依赖于零、极点相互抵消,对实
现的精度要求很高。在存在有限字长效应的情 况下,有可能造成系统不稳定。
54
确保所有零点、极点在单位圆内。 55
(h(n)为实数)
第k对 极点, 即第k 个与第 N-k个 谐振器 合并
56
谐振频 率不变
还有两点需要注意:(存在实根) 57
1
前言
线性时不变系统用单位冲击响应来表示 系统函数实际上单位冲击响应的Z变换 系统函数反映线性时不变系统的特性 大多数的信号处理可看成是对信号的滤波操作 数字滤波器实际上就是线性时不变系统
因此数字滤波器可以表示为:
2
前言
M
bk zk
H(z) Y(z) / X (z)
k 0 N
1 ak zk
从信号流图中:
可以清楚地看到系统中的运算步骤和运 算结构。FFT时用到了该特点。
运算结构可以直观反映所需的存储单元 和运算次数。由于是数字实现,必然存 在系统误差,运算结构同时也可以反映 系统误差的累积问题。 下面讨论的IIR和FIR滤波器结构将涉及 上述问题。
14
1
15
无限冲击响应滤波器的特点
82
第四章-数字滤波器的基本结构
将(4-7)式关系代入上式,得
H ( z)
N 11 2
h(n)
[zn
z(N 1n) ]
h(
N
1)
N 1
z2
(4-9)
n0
2
(4-8)(4-9)式中+号代表偶对称,-号代表奇对称。
当h(n)奇对称时,由于
h(n)
h(
N
1
n), 故h(
N 1) 2
0
下面的图19、图20分别画出N为偶数和N为奇数时 的线性相位FIR滤波器的结构。
W k N
WN( N k )
各并联支路的极点为
r
j 2 k
e N
,k
0,1, 2,
, N 1
为使系数为实数,可将共轭根合并,在z平面上 这些共轭根在半径为r的圆周上以实轴为轴成对 称分布,即 zN k zk
也就是 W (N k )
j 2 ( N k )
e N
(e
j
2 k N
)
WNk
27
4.3 有限长单位冲激响应(FIR)滤波器 的基本结构
级联型的每级对应一组由 (0i , 1i , 2i ) 参数决定的零点
6
4.3 有限长单位冲激响应(FIR)滤波器 的基本结构
三、线性相位的FIR滤波器结构: 在许多实际应用,如图像处理中,要求数字滤波器具
有线性相位 具有线性相位特性的滤波器传输函数H(ej)为
H(e j ) H() e j ()
则(4-12)式可写成:
1
N 1
H (z)
N
HC (z)
k 0
HK (z)
(4-13)
N 1
上式表明H(z)可看成是由 HC (z)和 HK (z) 两部分级 k 0
数字滤波器的基本结构
x[k ]
e0f [k]
e1f [k] K1
z 1 e0b [k ]
K1 z1 e1b [k ]
e
f p
1[k
]
ebp1[k ]
z 1
e2f [k] K2 K2 e2b [k ]
Kp Kp
e
f p
[k
]
y[k ]
Kp
z 1
Kp
ebp [k] yb[k]
e
f p
[k
]
反射系数
e
b p
[k
]
AZ系统的基本格形单元
第28页/共35页
三种滤波器的系统函数
全零点(AZ)滤波器 p A(z) 1 a p (n)z n n1
全极点(AP)滤波器
H(z) 1
1
A(z)
p
1 a p (n)z n
AZAP滤波器
n1
p
H (z) m0 bm z m B(z) A(z) A(z)
第29页/共35页
一、全零点(AZ)滤波器的格型结构
第30页/共35页
反射系数Kp的确定
根据系统函数,由高阶系数递推各低阶反射系数Kp
K p a p ( p)
a p1(i)
ap
(i)
K 1
pap
K
2 p
(
p
i)
(i 1,2,, p 1)
K
p1
a p1 (
p
1)
ap(
p
1) K
1
K
2 p
p a p (1)
第31页/共35页
二、全极点(AP)滤波器的格型结构
e
f p
[k
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、数字滤波器的工作原理
设x(n)是系统的输入,X (e )是其付氏变换。 y (n)是系统的输出,Y (e jw )是其付氏变换。 则:
x(n) h(n) y(n)
jw
则LTI系统的输出为:
y ( n)
看出:输入序列的频谱X (e jw )经过滤波器 jw jw jw (其系统性能用H (e )表示)后变成X (e ) H (e ) jw jw jw 选取H (e ), 使滤波器输出X (e ) H (e )符合我们的要求, 这就是数字滤波器的工作原理。
m
1 jw jw h ( n m ) x ( m ) F [ X ( e ) H ( e )]
三、数字滤波器表示方法
• 有两 种表示方法:方框图表示法;流图 表示法. • 数字滤波器中,信号只有延时,乘以常数 和相加三种运算。 • 所以DF结构中有三个基本运算单元:加 法器,单位延时,乘常数的乘法器。
六、本章介绍主要的内容
1.分别介绍FIR、IIR滤波器实现的基本结构。 2.介绍一种特殊的滤波器结构实现形式:格型 滤波器结构.
第二节 IIR DF的基本结构
一、IIR DF特点
1.单位冲激响应h(n)是无限长的n→∞
2.系统函数H(z)在有限长Z平面(0<|Z|<∞)有 极点存在。 3.结构上存在输出到输入的反馈,也即结构 上是递归型的。 4.因果稳定的IIR滤波器其全部极点一定在单 位园内。
第 6章
数字滤波器的结构 DF (Digital Filter)
第一节 引言
一、什么是数字滤波器
• 顾名思义:其作用是对输入信号起到滤波 的作用;即DF是由差分方程描述的一类特 殊的离散时间系统。 • 它的功能:把输入序列通过一定的运算变 换成输出序列。不同的运算处理方法决定 了滤波器的实现结构的不同。
4.模拟滤波器的理想幅频特性
H ( j)
LPAF
c
H ( j)
c
HPAF
c c
H ( j) c
BPAF
H ( j)
c
BSAF
c 2 c1 c1 c 2
5.数字滤波器的理想幅频特性
H (e jw )
…….
H (e )
jw
2
c
…….
1、经典滤波器
• 假定输入信号x(n)中的有用成分和希望去除 的成分,各自占有不同的频带。当x(n)经 过一个线性系统(即滤波器)后即可将欲去 除的成分有效地去除。但如果信号和噪声的 频谱相互重叠,那么经典滤波器将无能为力。
|X(ejw)| 有用 无用 |H(ejw)| |Y(ejw)|
wc
w
wc
LPDF
H (e )
jw
2
3
…….
HPDF
H (e )
jw
2
…….
BPDF
2
BSDF
五、研究DF实现结构意义
1.滤波器的基本特性(如有限长冲激响应FIR与无 限长冲激响应IIR)决定了结构上有不同的特点。
2.不同结构所需的存储单元及乘法次数不同,前 者影响复杂性,后者影响运算速度。 3.有限精度(有限字长)实现情况下,不同运算 结构的误差及稳定性不同。 4.好的滤波器结构应该易于控制滤波器性能,适 合于模块化实现,便于时分复用。
1、方框图、流图表示法
方框图表示法: 单位延时
Z-1
信号流图表示法:
Z-1
系数乘
a
a
相加
把上述三个基本单元互联,可构成不同数字网络或运 算结构,也有方框图表示法和流图表示法。
2.例子
例:二阶数字滤波器:
y(n) a1 y(n 1) a2 y(n 2) b0 x(n)
其方框图及流图结构如下:
x(n) b0
a1 Z-1
y(n)
x(n)
b0
a1 Z-1 Z-1
y(n)
a2
Z-1
a2
看出:可通过流图或方框图看出系统的运算步骤和运算结构。
以后我们用流图来分析数字滤波器结构。DF网络结构或DF运 算结构二个术语有微小的差别,但大抵一样,可以混用。
四、数字滤波器的分类
• • • • 滤波器的种类很多,分类方法也不同。 1.从功能上分;低、带、高、带阻。 2.从实现方法上分:FIR、IIR 3.从设计方法上来分:Chebyshev(切比雪 夫),Butterworth(巴特沃斯) • 4.从处理信号分:经典滤波器、现代滤波器 • 等等。
wc
w
2.现代滤波器
它主要研究内容是从含有噪声的数据记录(又称 时间序列)中估计出信号的某些特征或信号本身。一 旦信号被估计出,那么估计出的信号将比原信号会有 高的信噪比。 现代滤波器把信号和噪声都视为随机信号,利用 它们的统计特征(如自相关函数、功率谱等)导出一 套最佳估值算法,然后用硬件或软件予以实现。
以下我们讨论M<=N情况。
则这一系统差分方程为:
y (n) ai y (n i ) bi x(n i )
i 0 i 0
N
M
2、直接I型 (1)直接I型流图
• IIRDF的差分方程就代表了一种最直接的计算公式, 用流图表现出来的实现结构即为直接I型结构(即由 差分方程直接实现。) 方程看出:y(n)由两部分组成:
二、IIR DF基本结构
IIR DF类型有:直接型、级联型、并联型。 直接型结构:直接I型、直接II型(正准型、 典范型)。
1、 IIR DF系统函数及:
i b Z i M
H(z )
1
i 0 N
i a Z i i 1
Y ( z) X ( z)
现代滤波器理论源于维纳在40年代及其以后的工 作,这一类滤波器的代表为:维纳滤波器,此外,还 有卡尔曼滤波器、线性预测器、自适应滤波器。 本课程主要讲经典滤波器,外带一点自适应滤波器
3.模拟滤波器和数字滤波器
• 经典滤波器从功能上分又可分为: 低通滤波器(LPAF/LPDF):Low pass analog filter 带通滤波器(BPAF/BPDF):Bandpass analog filter 高通滤波器(HPAF/HPDF):High pass analog filter 带阻滤波器(BSAF/BSDF):Bandstop analog filter • 即它们每一种又可分为:数字(Digital)和模拟 (Analog)滤波器。