状态反馈H∞控制问题可解条件的简化
一类切换线性奇异系统的状态反馈H_∞控制
d i1 .9 9 ji n 10 — 6 5 2 1 . 0 0 1 o:0 3 6 /.s .0 1 3 9 .0 1 1 . 3 s
H sae fe b c o to o tt e d a k c nr lfr ca s o wic e i e rsn u a y t ms ls fs th d ln a ig lrs se
F u mu.P i U Zh U Y
( oeeo l t nc&I o t nE gnen ,H n nU o n r i n ier g ea n esyf c ne&Tcnl y uyn -n n4 10 C ia f ma o i v i e eh o g ,Loa g/ a 70 3, hn ) o / e
a d f a i i t ft ep e e t d meh d n e s l y o r s n e t o . bi h
Ke r s s i h d s s ms ig lrs se ;H c n rl tt e d a k;L s y wo d : w t e y t c e ;s u a y t ms n o to ;s e f e b c a MI
函数与线性矩阵不等式相结合 的方法 , 了一类切换线性奇 研究 异系统 的状态反馈 日 控制问题 , 到 了使 闭环 系统渐近稳 定 得
且满足 日 性 能的控制器存 在的一个充分条件 。
件, 并设计 了相应 的子 控制 器和切 换策 略 。采用矩 阵 变换 , 矩 阵不等 式等 价 转换 为 一组 线性 矩 阵不 等 式。数 将
《鲁棒控制》课堂笔记-3-H无穷控制理论
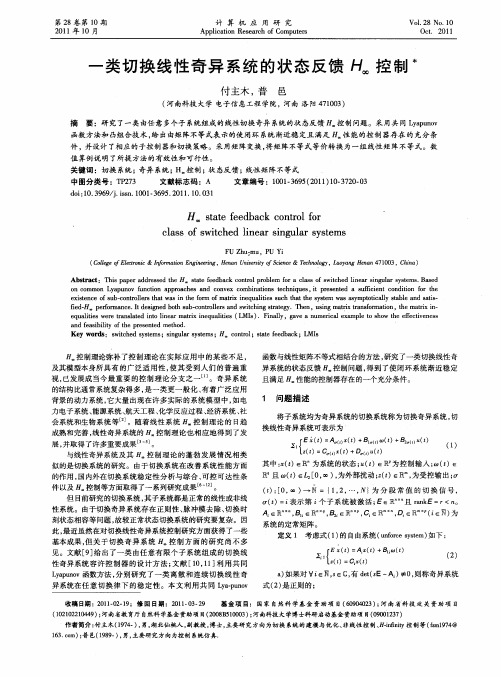
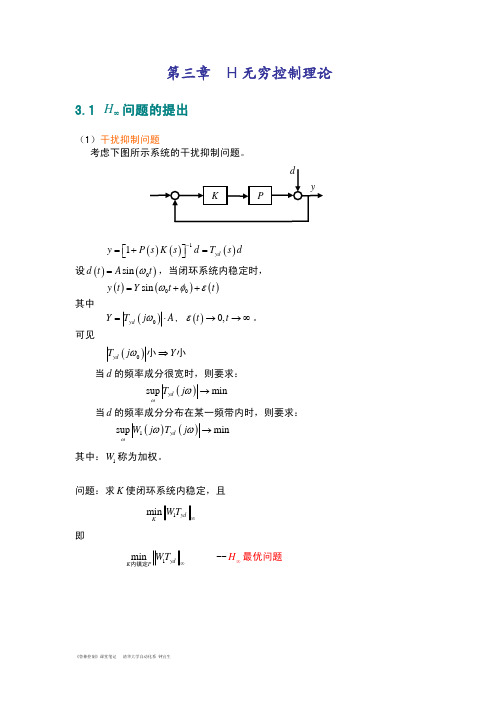
(6) 跟踪问题
r
u
C1 +
P
y
C2
u = C1r + C2 y
考虑控制性能指标:
min
r−
y
+
2
ρ
u
2 = min
r−y ρu
2
即 ቤተ መጻሕፍቲ ባይዱ
∫ min
∞ 0
(
r
−
y
)2
+
ρ2u2
dt
令
z
=
∆ ∞ ≤γ
该系统鲁棒稳定 iff A0 稳定,且
γ
<
C0 ( sI
) − A0 −1 B0
∞
−1
即
C0
( sI
−
A0
)−1
B0
∞
<
1 γ
(5)状态反馈鲁棒镇定问题
《鲁棒控制》课堂笔记 清华大学自动化系 钟宜生
考虑不确定系统
x&(t ) = Ax (t )+ Bu (t)
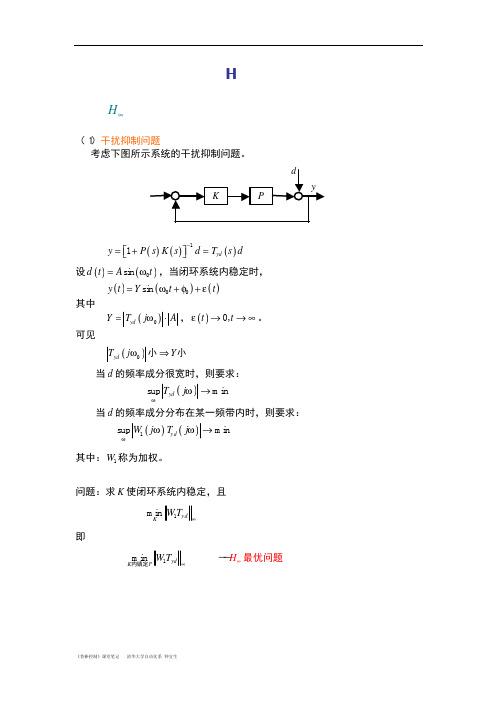
其中:W1 称为加权。
问题:求 K 使闭环系统内稳定,且
即
min K
W1Ty d
∞
min
K内镇定P
W1Tyd
∞ -- H∞ 最优问题
《鲁棒控制》课堂笔记 清华大学自动化系 钟宜生
(2)稳定裕度问题
−
K
P
假设闭环系统稳定,定义:
r − y ρu
则
z
=
1
−
1
C1 P − C2P
ρ
C1P 1− C2P
r
= Tzrr
性能指标等价为:
T-S模糊系统的部分状态反馈H∞控制

& & 其中 "$ $ ) %$ ! * !%& $ ) !, ", …, $ * ’ $ (" $ * (" $ ’ $ ,
#, " "$ ) ) % $ ! * ! % & * ’& ("&$ * (" $ ’) * %) ! * !% & $ ) ) * ’ ( * ( " ) ’$ , $, ) ) !, ", …, #, %$ ) &* %$ &*+ ! , ( " $ ) &* (" $ , !)
针对部分状态反馈控制器设计问题定义如下 集合 6 ;{ % @ % 为 ! 到 0 之间的正整数,表示状态 变量 " % 不用于反馈} , (!) 7 ; {4 @ 4 ! /1 A 0 ,且 4 的第 % 列全为零, %! 6} 。 则部分状态反馈控制器设计问题可 归结为求 4% !7,使闭环系统 ($) 稳定。 定理 !. 如果存在矩阵 8! % , % ; !, ’, …, $, 和
! . * + , 模糊系统
* + , 模糊系统是由一系列 27 *89: 规则组 成的,它的每个子系统都是一个线性系统,考虑 如下模糊系统 " (#); $& ( ( ’% " ( #) < (! % ) ( #) < (’ % * ( #) ) , % !)
% ;! $ $
( + #) ; $& ( ( ,% ( " #) < -% * ( #) ) . % !)
% ;!
收稿日期: ’""(
《2024年离散广义系统的H_∞控制及有限时间控制》范文

《离散广义系统的H_∞控制及有限时间控制》篇一离散广义系统的H∞控制及有限时间控制一、引言随着现代控制理论的发展,离散广义系统在众多领域如通信、网络、航空航天等得到了广泛的应用。
其中,H∞控制及有限时间控制是离散广义系统控制策略中的两个重要研究方向。
H∞控制旨在通过设计控制器,使系统在外部扰动下仍能保持稳定并满足一定的性能指标;而有限时间控制则强调在特定时间内完成对系统的控制任务。
本文将重点探讨离散广义系统的H∞控制和有限时间控制的原理、方法及实际应用。
二、离散广义系统的H∞控制(一)H∞控制基本原理H∞控制是一种基于无穷范数的控制方法,旨在优化系统在外部扰动下的性能。
对于离散广义系统,H∞控制的目的是寻找一个合适的控制器,使得系统在外部扰动的作用下,其输出信号的无穷范数最小化。
(二)H∞控制方法H∞控制方法主要包括状态反馈控制和输出反馈控制。
其中,状态反馈控制通过测量系统的状态信息,设计出相应的控制器;而输出反馈控制则通过测量系统的输出信息,设计出反馈控制器。
这两种方法都可以有效地抑制外部扰动对系统的影响,提高系统的稳定性和性能。
(三)H∞控制在离散广义系统中的应用H∞控制在离散广义系统中的应用广泛,如航空航天、通信网络等领域。
通过设计合适的控制器,可以有效地抑制外部扰动对系统的影响,提高系统的稳定性和性能。
三、离散广义系统的有限时间控制(一)有限时间控制基本原理有限时间控制是指在特定时间内完成对系统的控制任务。
对于离散广义系统,有限时间控制的目的是在给定的时间内,使系统的状态达到期望的状态或满足特定的性能指标。
(二)有限时间控制方法有限时间控制方法主要包括终端滑模控制和有限时间镇定控制等。
终端滑模控制通过设计合适的滑模面,使系统在有限时间内到达滑模面并保持在该滑模面上;而有限时间镇定控制则是通过设计合适的控制器,使系统在有限时间内达到期望的状态。
(三)有限时间控制在离散广义系统中的应用有限时间控制在离散广义系统中的应用主要涉及机器人控制、自动驾驶等领域。
《鲁棒控制》-3-H无穷控制理论
考虑不确定系统
x (t ) = Ax (t ) + Bu (t )
其中: A = A0 + ΔA ; B = B0 + ΔB
[ΔA ΔB] = DΩ[E1 E2 ] = DΩE
ΩT Ω ≤ I
问题:求状态反馈 u = Kx, s.t.
( E1 + E2 K ) ( sI − A0 − ) B0 K −1 D ∞ < 1
⎤ ⎥ ⎥ ⎥ ⎥⎦
r
=
Tzr r
性能指标等价为:
∫ min ∞ zT z dt = min z 2
0
2
设
{ } r ∈
r
r = Wd, d ∈ H2 ,
d
≤1
2
《鲁棒控制》课堂笔记 清华大学自动化系 钟宜生
-- H∞ 次优问题
问题:求 C1 和 C2 使系统内稳定,且:
⎡
min ⎢ sup ⎣ C1 ,C2 d∈H2 , d 2 ≤1
1 min
K 1+ PK ∞
-- H∞ 最优问题
(3) 频域鲁棒镇定问题
Δ
+
−
P0
K
} G = {P P = P0 + Δ, Δ 稳定,且 Δ ( jω ) ≤ r ( jω ) ,∀ω ∈ R
其中: P0 为标称对象; r ( s) 是已知的稳定的实有理函数。
• 鲁棒镇定: K 镇定 G ,即对 ∀P ∈G, K 使闭环系统内稳定。
问题:
( ) min
K内稳G
Tzw
∞
= min K内稳 P
1+ PK −1
∞
2、鲁棒镇定问题 ⇒ 标准问题
Δ
单时滞系统时滞状态反馈H_∞控制

单时滞系统时滞状态反馈H_∞控制
屈百达;陆殿生
【期刊名称】《沈阳工业学院学报》
【年(卷),期】1999(18)3
【摘要】提出了在时滞系统的H∞ 控制中,引入当前状态反馈与时滞状态反馈的问题;应用传递函数与状态空间法相结合的论证方法,给出了时滞系统复合状态反馈H∞ 控制的可解判据;同时,得出了复合状态反馈控制律.
【总页数】6页(P73-78)
【关键词】状态反馈;H∞控制;黎卡提方程;时滞系统
【作者】屈百达;陆殿生
【作者单位】沈阳工业学院专科学校
【正文语种】中文
【中图分类】TP13;TP273
【相关文献】
1.线性时不变时滞系统与时滞相关的状态反馈控制 [J], 张潜;梅灿华
2.同时具有状态与控制时变时滞系统的H_∞输出反馈控制 [J], 官建伟;杨富文
3.线性广义时滞系统的H_∞状态反馈控制器 [J], 冯俊娥;程兆林
4.线性离散时滞系统滞后相关型H_∞状态反馈控制 [J], 姜偕富;徐文立
5.变时滞线性系统的时滞相关的输出反馈H_∞控制 [J], 张志钢;张承慧;冯俊娥因版权原因,仅展示原文概要,查看原文内容请购买。
线性时滞系统的状态反馈H∞控制

20 0 8年 6月
湖南 鲜 报 一 彝学
J un lo n n F rtNoma olg o ra fHu a i r lC l e s e
Jn 2o u。 o8
V0. No 2 18 .
第8 卷第 2 期
线 性 时滞 系统 的状 态 反 馈 H∞控 制
林 敏
( 湖南第一师范学院数理系 , 湖南 长沙 4 00 ) 125
摘 要: 基于 L auo —K aosi泛函方法 , L ( yp n v rsvki 以 MI 线性 矩阵不等式) 的形式 , 出了一般 的状 态滞后 自治 系统 内稳 给
定且具有 范数界 的一个充分条件 和一般 的状 态滞后 系统 问题有解 的一个充分条件 , 并通过 L I M 获得控制 器的解。数值例
成 立
收 稿 日期 :0 8 0 —2 20— 2 5
作者简 介: 林
敏 (9 O ) 女 , 1 8一 , 湖北 随州人 , 湖南第一 师范学院数理系助教 , 主要从事鲁棒控制方面的研究 。
1 67
维普资讯
2闭环系统具有 H 范数约 y即 I( l < l ( ) 束 , l £ l yl ) 2 ∞ )
引理 1 [ 对任 意常数矩 阵, ∈R , =Wr , : 4 一 >0 某一
v x = () £ + 一 () 喀 + 一( 一 + ( P ( 』 ^ Q () 』 ^^ t ) )
一
y0 ( + ) x t 喀 』 £ W ( + ) _
控制理论 是鲁棒 控制 的一 个重要 分 支。在许 多实 际系统 中, 由予测量的 不灵 敏性 、 件 的老化 、 械传输 等 元 机 原 因, 系统中 出现 时滞 现 象极 为普 遍 。因此 , 滞系 统 的 时
离散时间多胞型系统的状态反馈H∞控制

S a e Fe db c ∞ Co r lf r Dic ee i e Poy o c S se s t t e a k H nt o o s r t -tm lt pi y t m
W ANG i u L —k i HU o i Gu —ln
( aca gH nkn nvrt, a ca g Jag i 3 0 3 C i ) N nh n a gog U i sy N nh n ,inx 0 6 , hn ei 3 a
离散 时 间多胞 型 系统 的状 态反 馈 H∞控 制
王利魁
( 昌航 空大学 , 南 江西 南昌 306 ) 30 3
胡 国林
[ 关键 词] 。 H。控制 ; 多胞型系统 ; 齐次多项式参数相关矩 阵函数
[ 摘 要] 针对离散时 间多胞型 系统 的 H。控制 , 。 利用新 的 Lau o yp nv函数及控 制律 , 不 同于其他方 法 中只对 当前 时刻参数 并
o n c ee aest o v r e c ae,whc v r o sdrwb c fp e iusmeho ha h o v r e c ae i l w n e d — ne a d a c lr t hec n e g n e r t ih o e c me a a kso r vo t d t tte c n e g n e rt sso a d t e h
g e a o o ifnt l t u e d n s o s r aie r s l .I h n r e c n n tg i i y, h sla i g t l sc n e v t e u t n t e e d,s lt n e p r nsa e gv n t e n taet ee - n e oe v s i ai x e me t r i e d mo s t h f mu o i o r f ci e e s o e p o o e p r a h e t n s ft rp s d a p o c . v h
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
转置和 N ae e r e . 为 具有 如下特征 的矩 or. no 逆 A P s
1 问题 提 出
考虑广义 被控 对象 :
+ 四1
=
阵: K rA e( ) = I ( m A)
+ 四2 1
且
C +Dl +D 2 l L lⅡ)
+ D + D
中 : = ( ‘口 — Q)。> 0 口 。 - } () 2
引理 l 给定矩 阵 口, c和 Q=Q , 下陈述 如
等 价 :
单位矩 阵 , ( 、 和 A p A) A 分 别 为 A 的谱 半 径 、
收 璃 日期 : 03442 2 1 )-8 0
基 金 项 目 :山西 省 青 年 科学 基 盎 资 助项 目(990 B ;航 空 科 学 基 金资 助 项 目(9 SC 2 19 1I) 9E I f
作 者 筒 介 :曾建 平 (96一) 男 , 南 常 穆 人 . 士生 .0 3 北 京 16 . 湖 博 1∞8 ,
维普资讯
第1 期
曾 建平 等 : 态 反馈 1 状 t 控制 问 题 可 解 条 件 的简 化
5
1 )Q +B , +( C < ; C C B, C) 0
() 1
A A
)0
y : c
J
其 中K rA) h ( 分 别 表 示 A 的 核 空 间 和 值 e( 和 n A)
域空 间 , S m( X, := E F + ( X y E, F) X E F)
其 中 , R 、 R, Y R ∈ R ∈ ∈ o、 ∈ ~、 “和 ∈ R “
2 )B—Q口 <0,C Qcu <0
故 由引理 1对 固定 的 ∈L , MI6 可解 , y , L () 且 满 足式 ( )从 而 , 5. 由引理 2可知 , 有 可允 的 日 所
控 制器具 有式 () 形式 . 5的
分别 表示 广义 对 象 的状 态 、 制输 出 、 量 、 部 控 测 外
输 人和控 制变量 . 周知 , 态反 馈 日 状 控 制 问题 的 可解 性 可 转 化 为 线 性 矩 阵 不 等 式 ( MI 的 可 解 L ) 性 . 除少数 较特殊情 形 外 , 般难于 给 出 L I 一 M 的
维普资讯
20 0 2年 2月
北 京 航 空 航 天 大 学 学 报
Jun l fB in nvri fA rn uisa dAs oa t s o ra ej gU iest o eo a t n t nu c o i y c r i
F bu r 2]2 era ̄ ( 0
推广 到这些 控制问题 中去 . 文 中采用 的 记 号 说 明如 下 , ,表 示 台 适 维 数
K =R L C 中 : 一 S ( c )
R ( ~,I <1 R >0 一口 中c c 中c ) IL I , ,
:=置 一口 [ 一中 C 中 : ~C 中] 中 c ( c ) 口 ,
解析 解 , 求 解 依 赖 于 凸 优 化 算 法 . 此 , 少 其 因 减
LI M 中变量 数 目, 于有效地 求 解 L 是 重要 的 . 对 MI 本文对 在状 态 反 馈 日 控 制 问题 中 出现 的 一 类 L I考虑其 可 解 性 判 据 简 化 以 及可 行 解 簇 的构 M, 造 问题 . 由于镇 定 控制 、 正实控 制 、 协方 差 上 界控 制、 L 控 制 、 控 制 、 L 混合 H / 控 制 和 鲁 棒 H 控制 、 鲁棒 H 控 制 、 棒 L 鲁 控 制 等 控 制 问 题 “ 也导 致类 似 结 构 的 L , 本文 结 果 可 以 MI故
2 No. 8 1
第 2卷 第 1 8 期
状态 反 馈 日 控 制 问题可 解 条 件 的简化
曾建 平
北 京 航 空 航 天 大学
程 鹏
自动 化 科 学 与 电气 工程 学 院 )
张力 军
( 京航空航天大学 计算机科学- 北 5工程 系 )
摘
要 :考 虑 了状 态反馈 日 控 制可解 条件 的简 化 问题 . 态 反馈 日 状 控 制
由参 数 . 后 , 出 了 两 个 简 单 的 例 子 . 明 了文 中 方 法 的 正 确 性 . 最 给 说 关 键 词 : 态 反 馈 ;线 性 系 统 ;鲁 棒 控 制 ;H 状 控 制 ; MI L
中 图 分 类 号 : P 1 T 3 文献标识 码 : A 文 章 编 号 : 0 15 6 (0 2 0 - 0 - 10 .9 5 20 ) 1 0 40 0 4
约定 各矩 阵具有 合适 的维数 .
2 基本 引理
给定矩 阵 Q =Q , 和 c. R n ( =n B 设 ak B) , R k C)= n 进 行 满 秩 分 解 B =B B , = n a ( , C cc , 定义集 台 :
工 口 , Q) 珊( C, := { : ( L, , . 6 = 6 Z, R) st B J :+ Z 一 口 Z , C c:
问题 的可解 性 可转化 为一 类 线 性矩 阵 不等 式( M ) 可解 性 , 过 删 除这 类 L I中 L I的 通 M 多余 的矩 阵变量 , 可减 少 矩 阵 变量 的 维数 . 而且 , 于 降 维 L 的 可行 解 , 基 MI 可构 造 出 厚 L 的 可行 解 集 . 此基础 上 , 出了简化 的状 态反 馈 日 MI 在 导 控 制 问题 可 解条 件 . 基 于 简化条件 的可行解 , 可构造 出状 态反馈 日 控 制器 簇 , 控 制器 簇 中含 有 丰 富 的 自 该