状态反馈控制器
极点配置法设计状态反馈控制器——自动控制原理理论篇
——《自动控制原理-理论篇》第8.8节
自动化工程学院自动控制原理课程组制 2015年11月
主要内容
状态反馈控制系统 状态反馈控制器设计条件 用极点配置法设计状态反馈控制器 举例
主要内容
状态反馈控制系统 状态反馈控制器设计条件 用极点配置法设计状态反馈控制器 举例
SI系统,所以设 F f1 f2 fn
| sI A BF |
0 1
0 0
s 0
0
s
s
0
a0
0 a1
1
0
1
0
f1
f
2
f
n
an1 1
设计算法--适用于用能控标准形表示的SI系统的算法
a0 f1 0 a1 f 2 1
an1 f n n1
f1 0 a0 f2 1 a1
fn n1 an1
举例
例8-21 设系统的状态空间描述为
x(t)
0 6
1 0 5x(t) 1u(t)
rankB
AB
0 1
1 5
2
系统能控。
举例求解过程
期望闭环系统特征多项式为:
(s s1)(s s2 ) (s 3 2 j)(s 3 2 j) s2 6s 13
设: F f1 f2
s sI A BF
6 f1
1x(t)
F 7 1
现代控制理论实验五、状态反馈控制器设计河南工业大学

河南工业大学《现代控制理论》实验报告专业: 自动化 班级: F1203 姓名: 蔡申申 学号:201223910625完成日期:2015年1月9日 成绩评定:一、实验题目:状态反馈控制器设计二、实验目的1. 掌握状态反馈和输出反馈的概念及性质。
2. 掌握利用状态反馈进行极点配置的方法。
学会用MATLAB 求解状态反馈矩阵。
3. 掌握状态观测器的设计方法。
学会用MATLAB 设计状态观测器。
三、实验过程及结果1. 已知系统u x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=111100020003.[]x y 3333.02667.04.0= (1)求解系统的零点、极点和传递函数,并判断系统的能控性和能观测性。
A=[-3 0 0;0 2 0;0 0 -1];B=[1;1;1];C=[0.4 0.266 0.3333];[z p k]=ss2zp(A,B,C,0)系统的零极点:z =1.0017-1.9997p =-3-12k =0.9993[num den]=ss2tf(A,B,C,0)num =0 0.9993 0.9973 -2.0018den =1 2 -5 -6系统的传递函数:G1=tf(num,den)G1 =0.9993 s^2 + 0.9973 s - 2.002-----------------------------s^3 + 2 s^2 - 5 s - 6Continuous-time transfer function.Uc=ctrb(A,B); rank(Uc)ans =3满秩,系统是能控的。
Vo=obsv(A,C); rank(Vo)ans =3满秩,系统是能观的。
(2)分别选取K=[0 3 0],K=[1 3 2],K=[0 16 /3 –1/3](实验中只选取其中一个K为例)为状态反馈矩阵,求解闭环系统的零点、极点和传递函数,判断闭环系统的能控性和能观测性。
状态反馈控制器设计
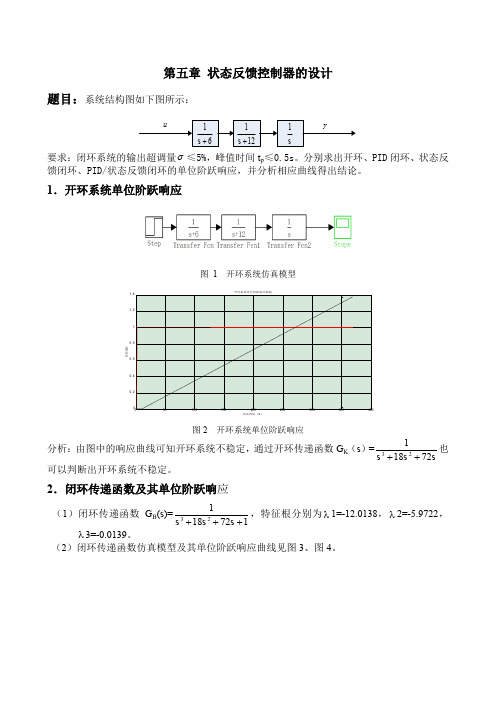
第五章 状态反馈控制器的设计题目:系统结构图如下图所示:要求:闭环系统的输出超调量σ≤5%,峰值时间t p ≤0.5s 。
分别求出开环、PID 闭环、状态反馈闭环、PID/状态反馈闭环的单位阶跃响应,并分析相应曲线得出结论。
1.开环系统单位阶跃响应图 1 开环系统仿真模型0.0.0.0.1.1.仿真时间(s )阶跃响应图2 开环系统单位阶跃响应分析:由图中的响应曲线可知开环系统不稳定,通过开环传递函数G K (s )=3211872s s s++也可以判断出开环系统不稳定。
2.闭环传递函数及其单位阶跃响应(1)闭环传递函数G B (s)=32118721s s s +++,特征根分别为λ1=-12.0138,λ2=-5.9722,λ3=-0.0139。
(2)闭环传递函数仿真模型及其单位阶跃响应曲线见图3、图4。
图3 闭环传递函数仿真模型图4 闭环传递函数单位阶跃响应分析:响应曲线表明,系统是稳定的,但是系统的响应时间太长,远达不到要求。
3.加入PID控制器,并进行参数整定后的单位阶跃响应图 5 PID控制仿真模型其中参数设置为:K p =256.8 ,K i =0.2,K d=23.2。
图6 PID 闭环控制输出波形图分析:通过Workspace 数据查询可知峰值时间tp=0.98686s ,最大输出值为1.0485,所以超调量为4.85%,满足要求,峰值时间达不到要求。
4.加入状态反馈控制器的单位阶跃响应图7 状态反馈控制仿真模型其中H1 到H3依次为10000、284.8、96.1。
0.0.0.0.1.-4t i m e(sec)O u t p u t图8 状态反馈控制单位阶跃响应分析:通过Workspace数据查询可知峰值时间tp=0.4492s,最大输出值为1.0449,所以超调量为4.49%,满足性能指标要求。
5.状态反馈/PID控制的单位阶跃响应图9 状态反馈/PID控制仿真模型其中PID参数设置为:K p =1.05 ,K i =0.01,K d=0;状态反馈控制H1 到H3依次为10000、284.8、96.1。
(完整版)状态反馈控制器的设计
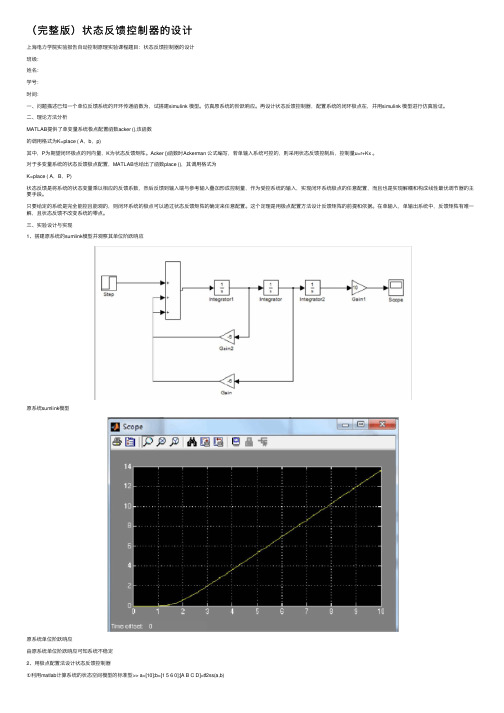
(完整版)状态反馈控制器的设计上海电⼒学院实验报告⾃动控制原理实验课程题⽬:状态反馈控制器的设计班级:姓名:学号:时间:⼀、问题描述已知⼀个单位反馈系统的开环传递函数为,试搭建simulink 模型。
仿真原系统的阶跃响应。
再设计状态反馈控制器,配置系统的闭环极点在,并⽤simulink 模型进⾏仿真验证。
⼆、理论⽅法分析MATLAB提供了单变量系统极点配置函数acker (),该函数的调⽤格式为K=place ( A,b,p)其中,P为期望闭环极点的列向量,K为状态反馈矩阵。
Acker ()函数时Ackerman 公式编写,若单输⼊系统可控的,则采⽤状态反馈控制后,控制量u=r+Kx 。
对于多变量系统的状态反馈极点配置,MATLAB也给出了函数place (),其调⽤格式为K=place ( A,B,P)状态反馈是将系统的状态变量乘以相应的反馈系数,然后反馈到输⼊端与参考输⼊叠加形成控制量,作为受控系统的输⼊,实现闭环系统极点的任意配置,⽽且也是实现解耦和构成线性最优调节器的主要⼿段。
只要给定的系统是完全能控且能观的,则闭环系统的极点可以通过状态反馈矩阵的确定来任意配置。
这个定理是⽤极点配置⽅法设计反馈矩阵的前提和依据。
在单输⼊,单输出系统中,反馈矩阵有唯⼀解,且状态反馈不改变系统的零点。
三、实验设计与实现1、搭建原系统的sumlink模型并观察其单位阶跃响应原系统sumlink模型原系统单位阶跃响应由原系统单位阶跃响应可知系统不稳定2、⽤极点配置法设计状态反馈控制器①利⽤matlab计算系统的状态空间模型的标准型>> a=[10];b=[1 5 6 0];[A B C D]=tf2ss(a,b)A = -5 -6 01 0 00 1 0B = 1C = 0 0 10③系统能控性矩阵>> uc=ctrb(A,B)uc = 1 -5 190 1 -50 0 1 >> rank(uc) ans = 3 所以系统完全能控③系统能观型矩阵>> vo=obsv(A,C) vo = 0 0 100 10 010 0 0 >> rank(vo) ans = 3 所以系统完全能观所以可以⽤极点配置法设计状态反馈控制器④求解系统反馈矩阵>> p=[-3 -0.5+j -0.5-j];k=acker(A,B,p)k = -1.0000 -1.7500 3.7500 加⼊反馈后的系统闭环极点为:>>sysnew=ss(A-B*k,B,C,D);pole(sysnew)ans = -3.0000-0.5000 + 1.0000i-0.5000 - 1.0000i⑤搭建加⼊反馈控制器后系统的sumlink模型⑥观察新系统的单位阶跃响应四、实验结果分析加⼊反馈控制器后系统的闭环极点在,符合题⽬要求。
极点配置法设计状态反馈控制器——自动控制原理
这两个多项式的系数相等,可得出:
0 0
1
1
n n1
i中含F阵系数fij
当F阵为1 n时
n个方程可解n个系数 fi
(i 1,2,...,n)
设计算法--适用于用能控标准形表示的SI系统的算法
设系统期望的闭环极点为s1、s2、sn ,则其
闭环特征式为s s1 s s2 s s3 s sn
SI系统,所以设 F f1 f2 fn
ห้องสมุดไป่ตู้
设计算法--适用于用能控标准形表示的SI系统的算法
s
1
0
0
0
0
s
1
0
0
0
0
0
s
1
a0 f1 a1 f2 a2 f3 an2 fn1 an1 fn s
sn (an1 fn )sn1 a1 f2 s a0 f1
设计算法--适用于用能控标准形表示的SI系统的算法
解:
系统能控。
举例----求解过程
期望闭环系统特征多项式为:
设: F f1 f2
F 7 1
w
u+
x2 ∫
--
++ -5
x2 x1
∫ x1
-
F 7 1
1
+
2
+
y
-6 1
7
a0 f1 0 a1 f 2 1
an1 f n n1
f1 0 a0 f2 1 a1
fn n1 an1
举例
例8-21 设系统的状态空间描述为
试求:(1)求状态反馈矩阵F使闭环系统有期望 极点s1,2=-3±2j; (2)绘制带有状态反馈控制器的状态变量图
第5章状态反馈控制器及状态观测器

极点配置定理: 线性(连续或离散)多变量系统能任 意配置极点的充分必要条件是,该系统状态完全能控。
27
极点配置的方法:
一、采用状态反馈 (Ⅰ)定理:线性定常系统可通过线性状态反馈任意地配置其全 部极点的充要条件是:此被控系统状态完全能控。 (Ⅱ)方法: 单输入单输出线性定常系统的状态方程为:
& x=Ax+Bu
u 若线性反馈控制律为:
= v - Kx
28
按指定极点配置设计状态反馈增益阵的基本方法: 选择状态反馈增益矩阵使系统的特征多项式 det[λI − ( A − bK )]
* f (λ ) ,即 等于期望的特征多项式
det[λI − ( A − bK )] = f * (λ )
按指定极点配置设计状态反馈增益阵的基本步骤 (1)判断系统能控性 (2)求能控标准型的变换矩阵P
n −1 L SC = ⎡ b Ab A b⎤ ⎣ ⎦ −1 = L 0 0 1 P S [ ] 1 C
⎡ P ⎤ 1 ⎢ PA ⎥ P=⎢ 1 ⎥ ⎢ M ⎥ ⎢ n −1 ⎥ ⎣P ⎦ 1A
29
3)求出被控对象的特征多项式
f (λ ) = det[ λI − A] = λn + an−1λn−1 + L + a1λ + a0
⎡0 2 ⎤ rank[ B AB] = rank ⎢ =2=n ⎥ ⎣1 1 ⎦ ⎡C ⎤ ⎡1 2 ⎤ rank ⎢ ⎥ = rank ⎢ =2=n ⎥ ⎣CA⎦ ⎣7 4 ⎦
开环系统为状态能控又能观的。 2. 经状态反馈u=v-Kx后的闭环系统的状态方程为
⎡1 2 ⎤ ⎡0 ⎤ x ′ = ( A − BK ) x + Bv = ⎢ x + ⎢ ⎥v ⎥ ⎣0 0 ⎦ ⎣1 ⎦
Matlab控制系统设计工具箱的状态反馈控制指南
Matlab控制系统设计工具箱的状态反馈控制指南引言:状态反馈控制是控制系统设计中常用的一种方法。
它通过测量系统状态,并将其反馈回控制器中,以调节系统的输出。
Matlab控制系统设计工具箱提供了一些强大的功能和工具,使得状态反馈控制的设计变得更加简单和方便。
本文将探讨Matlab控制系统设计工具箱中的状态反馈控制设计,并提供一些实例进行演示和说明。
一、Matlab控制系统设计工具箱简介Matlab控制系统设计工具箱是Matlab提供的一个用于控制系统设计与分析的工具。
它集成了多种控制系统设计和分析方法,包括状态反馈控制、PID控制、根轨迹设计等。
其中,状态反馈控制是一个重要且常用的设计方法,可以用来改善系统的稳定性、响应速度和鲁棒性。
二、Matlab控制系统设计工具箱中的状态反馈控制设计1. 系统模型的建立在进行状态反馈控制设计之前,我们首先需要建立被控对象的数学模型。
这个模型可以通过系统的物理特性、传递函数或差分方程等方式得到。
在Matlab中,我们可以使用tf或zpk函数来建立连续或离散的传递函数模型,并使用ss函数建立状态空间模型。
2. 系统的可控性和可观性分析在进行状态反馈控制设计之前,我们需要对系统进行可控性和可观性分析。
可控性是指系统是否可以通过状态反馈方式对其进行控制;可观性是指系统是否可以通过测量其输出对系统的状态进行估计。
在Matlab中,我们可以使用ctrb和obsv函数来进行可控性和可观性分析。
3. 构造状态反馈控制器构造状态反馈控制器的目标是通过选择适当的反馈矩阵来使系统在闭环下具有所需的性能指标。
在Matlab中,我们可以使用place函数来通过极点配置的方式构造状态反馈控制器,也可以使用lqr函数来进行基于线性二次调节器的控制器设计。
4. 系统的闭环分析在构造状态反馈控制器之后,我们需要对闭环系统进行性能分析。
通常,我们可以通过计算系统的特征根来评估系统的稳定性和响应速度。
状态反馈控制器与状态观测器
测控系统课程设计题目:状态反馈控制器与状态观测器——方案B1 2院(系)机电及自动化学院专业测控技术与仪器(辅助)学号姓名级别 2 0 0 9指导老师2012年6月摘要在经典控制系统设计中,对于一个简单的SISO (单输入单输出)闭环系统而言,控制器部分只有简单的增益环节c K ,因此系统仅有唯一的控制参数c K 可供调整。
对于N 维控制系统,控制器需要至少N 个独立变量来调整系统所需根极点的位置,状态反馈控制器则可以将系统的所有状态变量X 都进行反馈,将系统的根极点调整到需要的位置。
而状态反馈控制的实现前提就是要求系统的所有状态变量可测,此时,利用系统某种数学形式的仿真来估计状态值,即系统的状态观测设计,就可以保证系统带全观测的状态反馈控制顺利实现。
本文主要介绍了带全观测器的状态反馈控制器。
关键词:状态反馈,状态观测AbstractThe classical control system design, for a simple SISO (SISO) closed loop system, a controller part is only the simple gain link, therefore only one control parameter can be adjusted. For the N control system, the controller needs at least N independent variable to adjust the system required root pole position, a state feedback controller can be a system of all state variables in X feedback, the system root poles are adjusted to the needs of the location of. While the state feedback control is the premise requirement system realizes all the state variables can be measured, this time using a mathematical form, system simulation to estimate the state value, namely the system state observer design, can guarantee system with full state feedback control for the smooth realization of observation. This paper mainly introduces the observer-based state feedback controller.Key words : state feedback, state observer目录1. 状态反馈控制器 ................................................................................................... - 4 -1.1状态反馈的定义 ................................................................................................ - 4 -1.2状态反馈控制器 ................................................................................................ - 4 -1.3完全可控性........................................................................................................... - 5 -1.4状态反馈控制器的极点配置...................................................................... - 6 -2.状态观测器设计 ...................................................................................................... - 7 -2.1系统状态观测器定义...................................................................................... - 7 -2.2完全可观性........................................................................................................... - 9 -2.3观测器增益的确定 ......................................................................................... - 10 -3.带全观测器的状态反馈控制 ...................................................................... - 10 -3.1仿真程序及分析 .............................................................................................. - 10 -3.2程序运行结果.................................................................................................... - 12 -4.学习小结....................................................................................................................... - 13 - 参考文献 ........................................................................................................................... - 13 -1. 状态反馈控制器1.1状态反馈的定义经典控制:只能用系统输出作为反馈控制器的输入; 现代控制:由于状态空间模型刻画了系统内部特征,故而还可用系统内部状态作为反馈控制器的输入。
lqr控制器设计方法
lqr控制器设计方法
LQR(线性二次型调节器)控制器是一种线性系统最优控制器,其设计方法基于最优控制理论和线性系统理论。
以下是LQR控制器设计的一般步骤:
1. 确定系统模型:首先需要确定被控系统的状态方程和输出方程,通常可以使用系统的物理模型或者通过系统辨识得到。
2. 定义性能指标:选择一个合适的性能指标,通常采用二次型性能指标,如系统状态向量的二次范数或某个输出变量的二次范数。
3. 求解最优控制问题:使用线性二次型调节器方法,将最优控制问题转化为求解一个黎卡提(Riccati)矩阵方程的问题。
这个矩阵方程描述了最优控制策略和控制性能之间的关系。
4. 设计状态反馈控制器:通过求解得到的黎卡提矩阵,可以设计出状态反馈控制器。
状态反馈控制器是一种线性状态反馈控制策略,它将系统状态和最优控制策略结合,实现最优控制效果。
5. 实现控制器:将设计好的状态反馈控制器在实际系统中实现,并进行实验验证。
如果实验结果不满足要求,需要回到步骤1重新进行控制器设计。
需要注意的是,LQR控制器设计方法是一种理论上的最优控制策略,但在实际应用中,由于系统模型的近似、噪声干扰和测量误差等因素的影响,可
能会导致控制效果不理想。
因此,在实际应用中,需要根据实际情况对控制器进行适当调整和优化。
现代控制理论之状态反馈与状态观测器介绍课件
状态反馈的设计方法
确定系统状态方程
设计状态反馈控制器
计算状态反馈增益矩阵
验证状态反馈控制器的性能
状态反馈的优缺点
优点:能够有效地减小系统的动态响应时间,提高系统的稳定性和动态性能。
优点:可以实现对系统的解耦控制,使得系统的控制更加简单和直观。
现代控制理论之状态反馈与状态观测器介绍课件
演讲人
01.
状态反馈
02.
03.
目录
状态观测器
状态反馈与状态观测器的关系
状态反馈
状态反馈的基本概念
状态反馈是一种控制策略,通过调整系统的状态来达到控制目标。
状态反馈控制器的设计基于系统的状态方程,通过调整输入信号来影响系统的状态。
状态反馈控制器可以改善系统的动态性能,提高系统的稳定性和鲁棒性。
04
状态反馈与状态观测器的区别
状态反馈需要知道系统的模型,状态观测器不需要知道系统的模型
04
状态反馈用于控制系统,状态观测器用于估计系统状态
03
状态观测器:通过观测系统的输出,估计系统的状态
02
状态反馈:通过调整系统的输入,使系统达到期望的状态
01
状态反馈与状态观测器在实际应用中的选择
状态反馈适用于系统模型已知且可控的情况,能够实现最优控制。
02
状态观测器通过测量系统的输入和输出,利用数学模型来估计系统的内部状态。
04
状态观测器在现代控制理论中具有重要地位,广泛应用于各种控制系统的设计与实现。
状态观测器的设计方法
状态观测器性能评估:通过仿真或实验,评估观测器的性能,如观测精度、响应速度等