第5章状态反馈控制器及状态观测器
现代控制理论---状态反馈和状态观测器

现代控制理论基础
主讲人: 主讲人:荣军 mail:rj1219 163. 1219@ E-mail:rj1219@
第五章 系统的状态反馈及观测器
在第二章, 在第二章,研究的是在己知系统的结构和参数情况下系统的 运动,从而了解系统的运动形态。 运动,从而了解系统的运动形态。第三章介绍了系统的能控性和 能观测性。第四章是系统稳定性问题。 能观测性。第四章是系统稳定性问题。如果将上述研究的内容概 括起来说,就是在已知系统的结构和参数情况下, 括起来说,就是在已知系统的结构和参数情况下,研究系统的性 能或特性,即所谓系统分析问题。 能或特性,即所谓系统分析问题。 本章将研究线性定常系统的综合。 本章将研究线性定常系统的综合。这是一个与系统分析相反 的命题,是在给定被控对象的情况下, 的命题,是在给定被控对象的情况下,通过设计控制器的结构和 参数,使系统满足预先规定的性能指标要求。 参数,使系统满足预先规定的性能指标要求。采用的方法是先测 量系统的状态,再用状态来确定被控对象上所加的控制输人, 量系统的状态,再用状态来确定被控对象上所加的控制输人,从 而构成状态反馈系统。 而构成状态反馈系统。
第五章 系统的状态反馈及观测器
采用状态反馈, 采用状态反馈,对系统能控性和能观测性有 无影响呢?这是本章讨论的重要内容之一 这是本章讨论的重要内容之一。 无影响呢 这是本章讨论的重要内容之一。同时 研究一个能控的系统, 研究一个能控的系统,引入状态反馈可以任意配 置状态反馈系统的极点, 置状态反馈系统的极点,保证系统具有所希望的 瞬态性能和稳态性; 瞬态性能和稳态性;对于系统的状态变量无法测 量但又要用它来实现反馈的情况, 量但又要用它来实现反馈的情况,通过状态重构 方法。设计状态观测器。 方法。设计状态观测器。
现代控制理论习题解答(第五章)
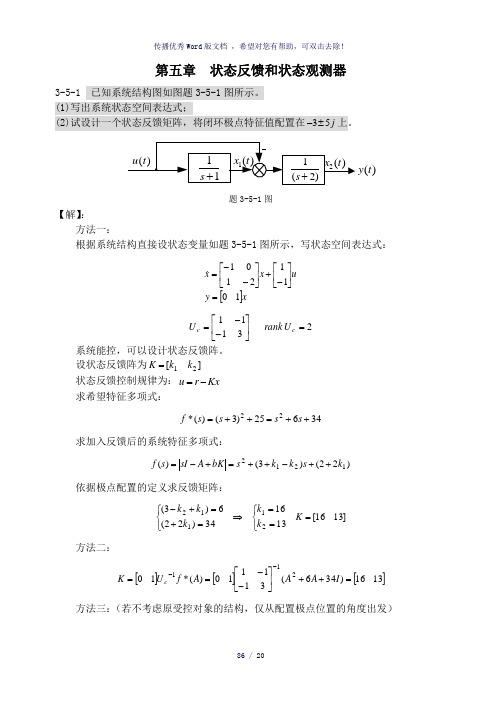
第五章 状态反馈和状态观测器3-5-1 已知系统结构图如图题3-5-1图所示。
(1)写出系统状态空间表达式;(2)试设计一个状态反馈矩阵,将闭环极点特征值配置在j 53±-上。
)(t y题3-5-1图【解】:方法一:根据系统结构直接设状态变量如题3-5-1图所示,写状态空间表达式:[]x y u x x 10112101=⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡--= 23111=⎥⎦⎤⎢⎣⎡--=c c U rank U系统能控,可以设计状态反馈阵。
设状态反馈阵为][21k k K = 状态反馈控制规律为:Kx r u -= 求希望特征多项式:34625)3()(*22++=++=s s s s f求加入反馈后的系统特征多项式:)22()3()(1212k s k k s bK A sI s f ++-++=+-=依据极点配置的定义求反馈矩阵:]1316[131634)22(6)3(21112=⎩⎨⎧==⇒⎩⎨⎧=+=+-K k k k k k 方法二:[][][]1316)346(311110)(*10211=++⎥⎦⎤⎢⎣⎡--==--I A A A f U K c方法三:(若不考虑原受控对象的结构,仅从配置极点位置的角度出发)求系统传递函数写出能控标准型:2321)111()()(2++-=+-+=s s ss s s U s Y []xy u x x 10103210-=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--= 求系统希望特征多项式:34625)3()(*22++=++=s s s s f求状态反馈矩阵K ~:[][][]33236234~21=--==k k K [][][][]5.05.031111010111=⎥⎦⎤⎢⎣⎡--==--Ab bP⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡=105.05.011A P P P []1316~==P K K依据系统传递函数写出能控标准型ss s s s s s U s Y 2310)2)(1(10)()(23++=++= []x y u x x 0010100320100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=求系统希望特征多项式:464]1)1)[(2()(*232+++=+++=s s s s s s f求状态反馈矩阵:[][][]144342604321=---==k k k K 。
第五章:状态反馈与状态观测器

以上子系统的状态观测器形式为
~ A GA ~ v0 Gz x1 11 21 x1
x x 即: ~1 A11 GA21 ~1 A12 y B1v G y A22 y B2v
令: 则可推出:
w ~1 Gy x
§5.2 SISO状态反馈系统的极点配置法
采用上节的状态反馈律, 所得闭环系统为
x A BK x Bu y C DK x Du
所谓极点配置法, 就是通过状态反馈阵 K的选取, 使以上闭环系统的极点, 即 A BK的特征值恰好处于 所希望的一组极点的位置上.
那么存在矩阵 K R 1n 使闭环系统∑K ,
A BK, B, C
以 s1 , s 2 , , s n 为极点, 即
detsI A BK f * s s si
n
的充要条件为受控系统∑0
是完全能控的. A, B, C
i 1
yt Cx
且该系统状态完全能控能观, 当其状态不能直接量测
~ A GC~ Bv Gy x x
此时的状态反馈作用为
v u K~ x
因此, 带有观测器的状态反馈闭环系统的阶数为 2n. 该闭环系统(复合系统)可表示为:
x A BK x ~ 0 x
点时, 可以调节的参数有
n 个, 但利用基本型的输出
反馈配置极点时, 可供调节的参数只有一个.
注4: 完全能控能观的SISO系统, 引入状态反馈后还
能保持状态完全能观测的充要条件.
注5: 关于带有输入变换的状态反馈系统.
二, 极点配置的方法选择 1, 当 n 3 采用能控规范型方法. 时, 即先将原系统化为能控规范型, 然后在此基础上 配置极点. 2, 当 n 3时, 采用特征值不变性原理方法. 此时,不通过能控规范型求状态反馈阵 K, 而直
现代控制实验状态反馈器和状态观测器的设计

现代控制实验状态反馈器和状态观测器的设计现代控制实验中,状态反馈器和状态观测器是设计系统的重要组成部分。
状态反馈器通过测量系统的状态变量,并利用反馈回路将状态变量与控制输入进行耦合,以优化系统的性能指标。
状态观测器则根据系统的输出信息,估计系统的状态变量,以便实时监测系统状态。
本文将分别介绍状态反馈器和状态观测器的设计原理和方法。
一、状态反馈器的设计:状态反馈器的设计目标是通过调整反馈增益矩阵,使得系统的状态变量在给定的性能要求下,达到所需的一组期望值。
其设计步骤如下:1.系统建模:通过对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
通常表示为:ẋ=Ax+Buy=Cx+Du其中,x为系统状态向量,u为控制输入向量,y为系统输出向量,A、B、C、D为系统的状态矩阵。
2.控制器设计:根据系统的动态性能要求,选择一个适当的闭环极点位置,并计算出一个合适的增益矩阵。
常用的设计方法有极点配置法、最优控制法等。
3.状态反馈器设计:根据控制器设计得到的增益矩阵,利用反馈回路将状态变量与控制输入进行耦合。
状态反馈器的输出为:u=-Kx其中,K为状态反馈增益矩阵。
4.性能评估与调整:通过仿真或实验,评估系统的性能表现,并根据需要对状态反馈器的增益矩阵进行调整。
二、状态观测器的设计:状态观测器的设计目标是根据系统的输出信息,通过一个状态估计器,实时估计系统的状态变量。
其设计步骤如下:1.系统建模:同样地,对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
2.观测器设计:根据系统的动态性能要求,选择一个合适的观测器极点位置,以及一个合适的观测器增益矩阵。
常用的设计方法有极点配置法、最优观测器法等。
3.状态估计:根据观测器设计得到的增益矩阵,通过观测器估计系统的状态变量。
状态观测器的输出为:x^=L(y-Cx^)其中,L为观测器增益矩阵,x^为状态估计向量。
4.性能评估与调整:通过仿真或实验,评估系统的状态估计精度,并根据需要对观测器的增益矩阵进行调整。
现代控制理论课件8-wzj第五章状态反馈和状态观测器1

(4)确定K阵 由 f * ( ) f ( ) 得 6 k3 14, 5 k2 60, 1 k1 200
求得: k1 199, k2 55, k3 8 所以状态反馈矩阵K为: K [199 55 8]
[例2] 对如下的线性定常系统,讨论状态反馈对系统极点的影响
1 0 0 x x u 0 2 1
[解]: (1)先判断该系统为-1的状态不能控。 (2)假如加入状态反馈阵K,得到反馈后的特征多项式为:
2015-3-16 11
f ( ) det[I ( A BK )]
(2)求状态反馈后闭环系统的特征多项式: f ( ) de t[I ( A BK )] (3)根据给定(或求得)的期望闭环极点,写出期望特征多项式。
n1 f * ( ) ( 1( ) 2 ) ( n ) n n 1 1 0
(4)直接写出在第二能控标准型下的反馈增益矩阵:
K [ 0 0 a1 a1 n 1 n1 ]
1 (5)求未变换前原系统的状态反馈增益矩阵: K KPc 2
第二能控标准型法,非常适合于计算机matlab求解
2015-3-16 17
[解]: (1)可知,系统已经是第二能控标准型了,故系统能控, 此时变换阵 Pc 2 I (2)计算原系统的特征多项式:
第五章 状态反馈和状态观测器
1. 状态反馈与极点配臵 2. 系统的镇定问题
3. 状态观测器 4. 带有观测器的状态反馈系统
2015-3-16
1
第一节 状态反馈与极点配臵
1. 状态反馈与输出反馈 2. 状态反馈极点配臵条件和算法 3. 状态反馈闭环系统的可(能)控性和可 (能)观测性
第5章状态反馈控制器及状态观测器

极点配置定理: 线性(连续或离散)多变量系统能任 意配置极点的充分必要条件是,该系统状态完全能控。
27
极点配置的方法:
一、采用状态反馈 (Ⅰ)定理:线性定常系统可通过线性状态反馈任意地配置其全 部极点的充要条件是:此被控系统状态完全能控。 (Ⅱ)方法: 单输入单输出线性定常系统的状态方程为:
& x=Ax+Bu
u 若线性反馈控制律为:
= v - Kx
28
按指定极点配置设计状态反馈增益阵的基本方法: 选择状态反馈增益矩阵使系统的特征多项式 det[λI − ( A − bK )]
* f (λ ) ,即 等于期望的特征多项式
det[λI − ( A − bK )] = f * (λ )
按指定极点配置设计状态反馈增益阵的基本步骤 (1)判断系统能控性 (2)求能控标准型的变换矩阵P
n −1 L SC = ⎡ b Ab A b⎤ ⎣ ⎦ −1 = L 0 0 1 P S [ ] 1 C
⎡ P ⎤ 1 ⎢ PA ⎥ P=⎢ 1 ⎥ ⎢ M ⎥ ⎢ n −1 ⎥ ⎣P ⎦ 1A
29
3)求出被控对象的特征多项式
f (λ ) = det[ λI − A] = λn + an−1λn−1 + L + a1λ + a0
⎡0 2 ⎤ rank[ B AB] = rank ⎢ =2=n ⎥ ⎣1 1 ⎦ ⎡C ⎤ ⎡1 2 ⎤ rank ⎢ ⎥ = rank ⎢ =2=n ⎥ ⎣CA⎦ ⎣7 4 ⎦
开环系统为状态能控又能观的。 2. 经状态反馈u=v-Kx后的闭环系统的状态方程为
⎡1 2 ⎤ ⎡0 ⎤ x ′ = ( A − BK ) x + Bv = ⎢ x + ⎢ ⎥v ⎥ ⎣0 0 ⎦ ⎣1 ⎦
状态反馈控制器与状态观测器
测控系统课程设计题目:状态反馈控制器与状态观测器——方案B1 2院(系)机电及自动化学院专业测控技术与仪器(辅助)学号姓名级别 2 0 0 9指导老师2012年6月摘要在经典控制系统设计中,对于一个简单的SISO (单输入单输出)闭环系统而言,控制器部分只有简单的增益环节c K ,因此系统仅有唯一的控制参数c K 可供调整。
对于N 维控制系统,控制器需要至少N 个独立变量来调整系统所需根极点的位置,状态反馈控制器则可以将系统的所有状态变量X 都进行反馈,将系统的根极点调整到需要的位置。
而状态反馈控制的实现前提就是要求系统的所有状态变量可测,此时,利用系统某种数学形式的仿真来估计状态值,即系统的状态观测设计,就可以保证系统带全观测的状态反馈控制顺利实现。
本文主要介绍了带全观测器的状态反馈控制器。
关键词:状态反馈,状态观测AbstractThe classical control system design, for a simple SISO (SISO) closed loop system, a controller part is only the simple gain link, therefore only one control parameter can be adjusted. For the N control system, the controller needs at least N independent variable to adjust the system required root pole position, a state feedback controller can be a system of all state variables in X feedback, the system root poles are adjusted to the needs of the location of. While the state feedback control is the premise requirement system realizes all the state variables can be measured, this time using a mathematical form, system simulation to estimate the state value, namely the system state observer design, can guarantee system with full state feedback control for the smooth realization of observation. This paper mainly introduces the observer-based state feedback controller.Key words : state feedback, state observer目录1. 状态反馈控制器 ................................................................................................... - 4 -1.1状态反馈的定义 ................................................................................................ - 4 -1.2状态反馈控制器 ................................................................................................ - 4 -1.3完全可控性........................................................................................................... - 5 -1.4状态反馈控制器的极点配置...................................................................... - 6 -2.状态观测器设计 ...................................................................................................... - 7 -2.1系统状态观测器定义...................................................................................... - 7 -2.2完全可观性........................................................................................................... - 9 -2.3观测器增益的确定 ......................................................................................... - 10 -3.带全观测器的状态反馈控制 ...................................................................... - 10 -3.1仿真程序及分析 .............................................................................................. - 10 -3.2程序运行结果.................................................................................................... - 12 -4.学习小结....................................................................................................................... - 13 - 参考文献 ........................................................................................................................... - 13 -1. 状态反馈控制器1.1状态反馈的定义经典控制:只能用系统输出作为反馈控制器的输入; 现代控制:由于状态空间模型刻画了系统内部特征,故而还可用系统内部状态作为反馈控制器的输入。
现代控制理论第五章
148第五章 线性定常系统的综合控制系统的综合任务是设计控制器,寻求改善系统性能的各种控制规律,,以保证系统的各项性能指标都得到满足。
§5-1线性反馈控制系统的基本结构及其特性 控制系统是由受控对象和反馈控制器两部分构成闭环系统。
现代控制理论采用状态反馈,状态反馈能提供更丰富的状态信息和可供选择的自由度,因而使用系统容易获得更为优异的性能。
一、状态反馈状态反馈是将系统的每一个状态变量乘以相应的反馈系数,然后反馈到输入端与参考输入相加形成控制律,作为受控系统的控制输入。
如图所示,其表达式:Du CX y Bu AX X+=+= (5-1)149多输入多输出系统式中:nR X ∈,TR u ∈,mRy ∈,n n A ⨯,r n B ⨯,n m C ⨯,r m D ⨯若0=D ,则受控系统X AX Buy C X ∙⎧⎪=+⎨=⎪⎩简记为:)=(C B A ,,0∑状态反馈控制规律:u kX v =+ (5-3) 其中:v -1⨯r 维参考输入;k-n r ⨯维状态反馈系数或状态反馈增益阵。
把式(5-3)代入式(5-1)得到状态反馈闭环系统表达式()()()()X AX Bu AX B kX v AX BkX Bv A Bk X Bv y C X D u C X D kX v C X D kX D v C D k X D v∙=+=++=++=++=+=++=++=++ 若=D ,()X A Bk X Bv y CX ∙⎧⎪=++⎨=⎪⎩简记为:])[(C B Bk A k ,,+=∑闭环系统的传递函数矩阵BBk A sI C s W k 1)]([)(-+-=状态反馈阵k 的引入,并不增加系统的维数,通过k 的选择自由地改变闭环系统的特征值,从而改变系统获得所要求的性能。
二、输出反馈150输出反馈是采用输出矢量y 构成线性反馈律,如图所示,受控系统)=(D C B A ,,,0∑为:X AX Bu y C X D u∙=+=+ (5-7)=D 时为X AX Bu y C X∙=+=输出线性反馈控制律为: v Hy u += (5-9)式中:H —m r ⨯维输出反馈增益阵,对单输出系统H 为1⨯r 维列矢量。
6第五章 状态反馈与状态观测器
( s ) sI A bK
s 3 k1 18s 2 18k1 18k 2 72 s 72k1 12k 2 k3
s 2 s 3 s 3 4s 2 6s 4 ( s ) s 1
现代控制理论
第五章 状态反馈与状态观测器
第五章 状态反馈与状态观测器
■ 线性反馈控制系统 ■ 系统的极点配置 ■ 解耦控制 ■ 状态观测器设计 ■ 带状态观测器的闭环控制系统
现代控制理论
第五章 状态反馈与状态观测器
§5.1 线性反馈控制系统
系统反馈控制的分类: 1 按照反馈信号的来源或引出点分 (1)状态反馈 (2)输出反馈 2 按照反馈信号的作用点或注入点分 (1)反馈至状态微分处 (2)反馈至控制输入处
A, K , B, C , D
K
若D 0,系统记为 K ( A BK ), B, C ,则: A BK x Br x K ( A BK ), B, C : y Cx
1
经过反馈后,系统的传递函数矩阵GK ( s )为: 注: 1A ( A BK ); GK ( s ) C sI A BK B
输出反馈要求∑0(A,B,C) (A B C) 系统状态能观测,不改变原被控系 A BHC x Br x 统的能控性和能观测性。
( A BHC ), B, C : y Cx
H
从输出到状态向量导数的反馈要求∑0(A,B,C)状态能观测,不 改变被控系统的能观测性 但却不 定能够保持系统的能控 改变被控系统的能观测性,但却不一定能够保持系统的能控 性。
1
MIMO系统的输出反馈结构图
现代控制理论
状态反馈和状态观测器
01
02
03
经典控制理论方法
采用频率响应法、根轨迹 法等经典控制理论方法进 行控制器参数整定。
现代控制理论方法
利用最优控制、鲁棒控制 等现代控制理论方法进行 控制器设计。
智能优化算法
应用遗传算法、粒子群算 法等智能优化算法进行控 制器参数寻优。
仿真验证与实验结果分析
仿真验证
利用MATLAB/Simulink等仿真工具对设计的控制系统进行仿真 验证,观察系统性能。
性能评估
除了稳定性外,状态反馈控制系统的性能还包括动态响应、稳态精度、鲁棒性等方面。通过对 这些性能指标的评估,可以全面了解系统的控制效果,为进一步优化控制策略提供指导。
应用领域与案例分析
应用领域
状态反馈控制技术广泛应用于航空航天、机器人、自动化生 产线等领域。在这些领域中,系统的动态性能和稳定性要求 较高,状态反馈控制能够提供更加精确和可靠的控制方案。
化和环境变化,提高状态估计的准确性和实时性。
THANKS
感谢观看
基于状态观测器的控制系统
03
设计
控制系统结构框架搭建
确定被控对象
01
明确被控对象的动态特性和输入输出关系,建立被控对象的数
学模型。
设计状态观测器
02
根据被控对象的数学模型,设计状态观测器以估计系统状态。
构建控制系统
03
将状态观测器与控制器相结合,构建基于状态观测器的控制系
统。
控制器参数整定方法论述
姿态和位置反馈
利用姿态传感器和位置传感器获取机器人的姿态和位置信 息,通过状态反馈控制机器人的平衡和定位精度。
力和力矩反馈
在机器人末端执行器上安装力传感器,实时监测机器人与 环境之间的交互力和力矩,通过状态反馈实现机器人的柔 顺控制和自适应能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
与状态反馈相比较,输出反馈:
缺点
在不增加补偿器的条件下,输出反馈 改变系统性能的效果不如状态反馈 好,不能任意配置系统的全部特征值;
(输出反馈只是状态反馈的一种特例,它能 达到的系统性能,状态反馈一定能达到;反之 则不然。)
优点
输出反馈在技术实现上很方便; 而状态反馈所用的系统状态可能不能直接 测量得到(需要状态观测器重构状态)。
n −1 L SC = ⎡ b Ab A b⎤ ⎣ ⎦ −1 = L 0 0 1 P S [ ] 1 C
⎡ P ⎤ 1 ⎢ PA ⎥ P=⎢ 1 ⎥ ⎢ M ⎥ ⎢ n −1 ⎥ ⎣P ⎦ 1A
29
3)求出被控对象的特征多项式
f (λ ) = det[ λI − A] = λn + an−1λn−1 + L + a1λ + a0
极点配置定理: 线性(连续或离散)多变量系统能任 意配置极点的充分必要条件是,该系统状态完全能控。
27
极点配置的方法:
一、采用状态反馈 (Ⅰ)定理:线性定常系统可通过线性状态反馈任意地配置其全 部极点的充要条件是:此被控系统状态完全能控。 (Ⅱ)方法: 单输入单输出线性定常系统的状态方程为:
& x=Ax+Bu
4)根据指定的闭环极点求出期望的闭环特征多项式
∗ n −1 * * f ∗ ( λ ) = λn + a n λ + L + a λ + a −1 1 0
5) 写出对于能控标准型下的状态反馈增益阵
∗ K = a0 − a0
[
∗ a1 − a1
∗ L a n −1 − a n −1
]
6)求定状态的反馈增益阵 7)状态反馈下的控制律为
4
第5章 状态反馈和状态观测器
5.1 状态反馈与输出反馈 5.2 状态反馈设计方法 5.3 状态观测器 5.4 带观测器的状态反馈控制器设计 5.5 MATLAB应用
5
5.1 状态反馈与输出反馈
5.1.1 状态反馈 5.1.2 输出反馈 5.1.3 状态反馈系统的能控性与能观性 5.1.4 状态反馈对传递函数的影响
10
5.1 状态反馈与输出反馈 5.1.2 输出反馈 1、定义:将系统的输出量乘以相应的系数反馈到输入端与参 考输入相加,其和作为受控系统的控制输入。 2、基本结构 (控制输入不直接作用到输出,即D=0)
用输出 信号
输出反馈控制律为:
u = v − Hy
输出反馈系统
输出反馈矩阵r×m
11
输出反馈系统的状态空间表达式为:
⎡0 2 ⎤ rank[ B AB] = rank ⎢ =2=n ⎥ ⎣1 1 ⎦ ⎡C ⎤ ⎡1 2 ⎤ rank ⎢ ⎥ = rank ⎢ =2=n ⎥ ⎣CA⎦ ⎣7 4 ⎦
开环系统为状态能控又能观的。 2. 经状态反馈u=v-Kx后的闭环系统的状态方程为
⎡1 2 ⎤ ⎡0 ⎤ x ′ = ( A − BK ) x + Bv = ⎢ x + ⎢ ⎥v ⎥ ⎣0 0 ⎦ ⎣1 ⎦
13
5.1.3 状态反馈系统的能控性与能观性
闭环系统的能控性与能观性
1、定理:状态反馈不改变受控系统的能控性;但 不保证系统的能观性不变。
状态反馈可以任意改变系统传函的极点,但不能改变 其零点,故可能出现零极点相消,导致能观性的改变。
2、定理:输出反馈不改变受控系统的能控性和能 观性。
14
5.1.3 状态反馈系统的能控性与能观性
15
5.1.4 状态反馈对传递函数的影响
y = cx 经线性变换为能控标准型:
⎡ 0 ⎢ ⎢ A=⎢ M ⎢ ⎢ 0 ⎢ ⎣ −a0 c = [ c0 1 0 L L 1 O O 0 0 ⎤ M ⎥ ⎥ ⎥, ⎥ 1 ⎥ −an −1 ⎥ ⎦ ⎡0 ⎤ ⎢0 ⎥ ⎢ ⎥ b = ⎢M ⎥ ⎢ ⎥ ⎢0 ⎥ ⎢ ⎣1 ⎥ ⎦
⎡0 ⎤ ⎥ b = ⎢ 0 ⎢ ⎥ ⎢ ⎣1 ⎥ ⎦
'
]
能控 不能观!
19
例 设线性定常系统的状态空间模型为
⎡1 2 ⎤ ⎡0 ⎤ x′ = ⎢ x + ⎢ ⎥u ⎥ ⎣3 1 ⎦ ⎣1 ⎦ y = [1 2] x
并设状态反馈阵K=[3 1]和输出反馈F=2。
¾ 分析该系统的状态反馈闭环系统和输出反馈闭环
系统的状态能控/能观性。
20
解 1:开环系统的能控性矩阵和能观性矩阵的秩分别为
u = v - Kx
参考输入, r×1 维矩阵
7
代入可得,状态反馈系统:
& = ( A - BK ) x + Bv x
2、基本结构
y = (C - DK ) x + Dv
D
v
—
u
B +
& x
∫
A
x
y
C
原系统
K
闭环状态反馈系统
状态反馈控制律:
u = v − Kx
8
v
状态反馈——就是将系统的每一状态变量乘以相应的反馈系数, 反馈到输入端,与参考输入相加,其和作为被控系统的控制信号。
若某能控系统
& = Ax + bu x
−a1 L −an − 2 c1 L cn −1 ]
系统的传递函数为 G ( s ) =
s n + a n −1 s n −1 + L + a1 s + a 0
c n −1 s n −1 + L + c1 s + c 0
16
引入状态反馈
u = v − Kx
& = ( A − bK ) x + bv x 则闭环系统的动态方程为 y = cx
6
5.1 状态反馈与输出反馈 5.1.1 状态反馈 1、定义:将系统的每一个状态变量乘以相应的反馈系数, 然 后反馈到输入端,与参考输入相加形成控制律,作 为受控系统的控制输入。 给定线性定常被控系统:
& = Ax + Bu x y = Cx + Du
选取状态反馈控制律为:
状态反馈(增 益)矩阵 r× n
1.状态反馈系统的能控性 定理:多变量线性系统(定常的或时变的) ∑ 0 = {A, B, C} ,
u (t ) = v(t ) − K (t ) x(t的状态反馈下,状态反馈闭环系 ) 在任何形如 统 ∑ K = { A − BK , B, C} 完全能控的充要条件是被控对象完全能控。
2.状态反馈系统的能观性 虽然状态反馈保持了动态方程的能控性,但往往会破坏动态 方程的能观性。 定理:输出反馈闭环系统能控的充要条件是被控系统能控;输 出反馈闭环系统能观的充要条件是被控系统能观。
& = Ax + Bu = Ax + B (v − Hy ) x = Ax + Bv − BHCx = ( A − BHC)x + Bv
y = Cx
对应的传递函数矩阵为: ∴ 输出反馈中的 HC 与状态反馈中的 K 相当; 但 H可供选择的自由度远比 K 小(因m小于n); ∴ 输出反馈一般只能相当于部分状态反馈。 只有当 HC=K时,输出反馈等同于全状态反馈。
设状态反馈阵为
K = k1 k2 L kn
[
]
则状态反馈系统的传递函数为
G ( s) = c n −1 s n −1 + L + c1 s + c 0
s n + (a n −1 − k n ) s n −1 + L + (a1 − k 2 ) s + (a 0 − k1 )
结论: 引入状态反馈改变了系统的极点,但没有改变系统的零点。
3
由于采用了状态方程描述系统,所以可以采用状态变量 进行反馈。 由于状态空间描述了系统内部信息的传递关系,比微分 方程、传递函数等外部描述更深入地揭示了系统的动态 特性,所以,采用状态反馈比采用输出反馈具有更好的 控制特性。 采用状态反馈不但可以实现闭环系统的特征值任意配 置,而且也是实现系统解耦和构成线性最优调节器等的 主要手段。 状态反馈和状态观测器设计是各种现代控制设计方法的 基础。
第5章 状态反馈和状态观测器
1
目前为止,我们已经: 建立了系统的状态空间模型 提出了基于状态空间模型的系统的运动分析 探讨了系统的性能:稳定性、能控性、能观性 “认识了世界” ⇒ 如何来“改变世界”?! 设计控制系统! 系统的控制方式----反馈?:开环控制、闭环控制
2
经典控制:只能用系统输出作为反馈控制器的输入; 现代控制:由于状态空间模型刻画了系统内部特征, 故而还可用系统内部状态作为反馈控制器的输入。 根据用于控制的系统信息:状态反馈、输出反馈。 控制系统的动态性能,主要由其状态矩阵的特征值 (即闭环极点)决定。 基于状态空间表达式,可以通过形成适当的反馈控 制,进而配置系统的极点,使得闭环系统具有期望的 动态特性。
K = KP
u = r − Kx
30
例1: 试设计如图所示系统中的状态反馈增益阵K,使闭环系 统的特征值为 λ1,2 = −7.07 ± j7.07, λ3 = −100
解: (1)判断系统是否可控。 系统的状态空间表达式为
⎡0 A= ⎢ ⎢0 ⎢ ⎣0 1 − 12 0 0 ⎤ 1 ⎥ ⎥ − 6⎥ ⎦
影响系统稳定性、动态性能的因素:极点位 置(系统矩阵的特征值) 通过反馈控制器的设计,可使得闭环系 统的极点位于预先给定的期望位置。
25
5.2 状态反馈设计方法
5.2.1 极点配置问题 5.2.2 输出反馈实现极点配置
26
5.2 状态反馈设计方法 5.2.1 极点配置问题
定义:通过选择反馈增益矩阵K,将闭环系统 的极点恰好配置在根平面上所期望的位 置,以获得所希望的动态性能。