第六章_状态反馈和状态观测器1
现代控制理论 状态反馈与状态观测器
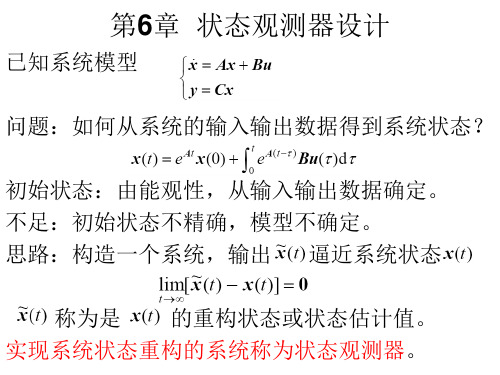
五、带观测器的状态反馈系统 • 在状态反馈中,不采样原系统的状态进行反 馈而采用状态观测器估计的状态进行反馈, 其结构图如下图所示.
• 状态估计器
x ( A GC ) x Bu Gy ˆ ˆ ˆ y Cx
• 原系统
x Ax Bu ˆ x Ax Bkx Bv y Cx ˆ x ( A Bk ) x Bk ( x x) Bv u v kx ˆ
• 传函不变,即
y C (sI A Bk ) B.v
1
• 显然系统的特性由矩阵的特征多项式
ˆ A Bk A 0 A GC Bk
决定.
• 由
ˆ det[ I A] det( I A Bk ) det( A GC ) 0
• 注意上述方法仅适用于SISO系统.
4.几点说明
(1).对SISO系统来说,状态反馈只改变极点位 臵,不影响零点. (2).由于改变了极点,因此可能出现零极点对 消,从而影响系统的可观性.
(3).从实现的角度,状态反馈比输出反馈 困难,复杂. (4)对SISO系统来说,极点配臵只改变了极 点在S平面上的位臵,显然不采用这种方法 难于达到系统动静性能的一致. (5).对MIMO来说,极点配臵的方法与SISO 方法是一致的,但SISO的k阵是唯一的,而 MIMO的k阵是非唯一的.
• 系统的状态估计器极点可任意配臵的充要 条件是:该系统的状态是可观的.
(3).状态估计器的设计方法. • 仿照状态反馈的极点配臵设计方法,只需先 进行可控性检验,改成可观性检查即可,其余 步骤相同.
四、降维观测器设计
• 一般情况下观测器是建立在对原系统模拟基 础上的,因而其维数和受控系统维数是相同 的,称为全维观测器(或估计器)。
第六章状态观测器设计说明
,则闭环极点
状态不可测,设计状态观测器。
选取观测器极点:
应用极点配置方法,可得观测器增益矩阵 观测器模型:
根据分离性原理,由以上分别得到的状态反馈 和观测器增益矩阵可构造基于观测器的输出反 馈控制器:
系统的动 态特性:
检验系统的稳定性: 对象和误差的初始条件: 系统曲线:
一般的输出反馈动态补偿器:
进行分块:
可以得到观测器的增益矩阵 L=[ 14 5 ]’
观测器模型:
反馈控制律
知识回顾 Knowledge Review
放映结束 感谢各位的批评指导!
谢 谢!
让我们共同进步
期望的特征值多项式是 比较两个多项式,可以得到,
所求的观测器是
应用MATLAB命令来计算观测器增益矩阵: L=(acker(A’,C’,V))’ L=(place(A’,C’,V))’
观测器设计时注意的问题:������ √观测器极点比系统极点快2~5倍;������ √并非越快越好。 兼顾观测器误差的衰减和系统抗扰动能力。 倒立摆例子
降阶观测器!
6.3 降阶观测器设计 考虑单输出系统
假定矩阵C具有形式[ 1 0 ],将系统状态 x 分划 成两部分:
其中 是一个标量,对应的恰好是系统的输出, 是状态向量中不能直接测量的部分。
对状态空间模型进行类似分划: 由此可得:
可以考虑新的状态空间模型: 降阶观测器模型 如何消除微分信号?
初始误差:
6.2 基于观测器的控制器设计 系统模型
假定系统是能控、能观的。
使得闭环系统极点为
的状态反馈控
制律是
。若系统状态不能直接测量,
可以用观测器
来估计系统的状态。进而用 来的控制
第六章状态反馈与状态观测器
y 0 1x
1)判断原系统的能控性,能观性。 0 1 rankb Ab rank 2 能控 1 0
C 0 1 rank rank 2 CA 1 0
能观
13
6.1 状态反馈和输出反馈
2)引入状态反馈: u v Kx
则: x ( A bK ) x bV 可得:
Modern Control Theory
第六章
状态反馈和状态观测器
1
第六章 状态反馈和状态观测器
目前为止,我们已经:
建立了系统的状态空间模型
提出了基于状态空间模型的系统的运动分析
探讨了系统的性能:稳定性、能控性、能观性 “认识了世界” ⇒ 如何来“改变世界”?! 设计控制系统! 系统的控制方式----反馈?:开环控制、闭环控制
– 极点位置(系统矩阵的特征值)
通过反馈控制器的设计,可使得闭环系 统的极点位于预先给定的期望位置。
16
6.2 极点配置问题
定义:通过选择反馈增益矩阵K,将闭环系统的 极点恰好配置在根平面上所期望的位置,以获 得所希望的动态性能。
极点配置的方法:
一、采用状态反馈
(Ⅰ)定理:线性定常系统可通过线性状态反馈 任意地配置其全部极点的充要条件 是:此被控系统状态完全能控。
不改变 系统的 能控性 和能观 性
状态反馈 — 效果佳
都不改变 系统维数 (因为两种 反馈形式均 输出反馈 — 实现方便 但能力有限
未增加新的 状态变量)
15
6.2 极点配置问题
• 系统性能:稳态性能和动态性能
– 稳态性能:稳定性、静态误差 – 动态性能:调节时间、响应速度...
• 影响系统稳定性、动态性能的因素:
第六章 状态反馈和状态观测器
中南大学信息科学与工程学院自动化专业现代控制理论讲义
第六章状态反馈和状态观测器
其中,显然有
0 ( A bK ) 0 an k1 1 0 an 1 k 2 1 a1 k n
系统 K 的闭环特征方程为
sn (a1 kn )sn1 (a2 kn1 )sn2 (an k1 ) 0
D v L -
u
B
+
∫
A
x
C
+y
K
图6.1.1 状态反馈示意图
中南大学信息科学与工程学院自动化专业现代控制理论讲义
第六章状态反馈和状态观测器
ΣK的状态空间表达式为:
x ( A BK ) x BLv K : y (C DK ) x DLv
若 D=0,则
x ( A BK ) x BLv K : y Cx
uc [B AB A2 B
An1 B] ( A BK )n1 B]
' uc [B ( A BK )B ( A BK )2 B
由 ( A BK )B AB B( KB) ,可知
( A BK )B 的列向量可以由 ( B AB )
的列向量的线性组合表示。
中南大学信息科学与工程学院自动化专业现代控制理论讲义
于是,从v 到 y 的传递函数矩阵
G( s;K,L) C ( sI A)1 B[ I K ( sI A)1 B]1 L G( s )[ I K ( sI A)1 B]1 L
定理 6.1.1 对于任何实常量矩阵K ,系统 ΣK 完全
能控的充要条件是系统 Σ 完全能控。P193 即引入状态反馈控制律(K,I) 不影响系统的能控性,
第六章 状态反馈与状态观测器

• 考察
T & u x = Ax+B z = A z +CTυ & 的对偶系统 n = BT z y =Cx
(4)Biblioteka 且定义 v=r-Kz • 则
T z =(A −CTk)z +CTr & n = BT z
(5)
• 注意到 AT −CTk =(A−kTC)T
(A−kTC)T 和 A−kTC • 而
(4).带观测器的状态反馈系统 带观测器的状态反馈系统. 带观测器的状态反馈系统 • 在状态反馈中 不采样原系统的状态进行反 在状态反馈中,不采样原系统的状态进行反 馈而采用状态观测器估计的状态进行反馈, 馈而采用状态观测器估计的状态进行反馈 其结构图如下图所示. 其结构图如下图所示
• 状态估计器
2.极点配置条件 极点配置条件 • 若被控系统 Σ0(A, B) 是状态完全能控的,那么 是状态完全能控的 那么 反馈系统的极点必是可以任意配置的,或者 反馈系统的极点必是可以任意配置的 或者 说,能使闭环系统极点任意配置的条件是被 能使闭环系统极点任意配置的条件是被 控系统完全可控. 控系统完全可控
极点配置(仅讨论单输入 单输出系统) 二.极点配置 仅讨论单输入 单输出系统 极点配置 仅讨论单输入/单输出系统 1.什么是极点配置 什么是极点配置. 什么是极点配置 A− • 如果 Σk[(A−Bk), B,C]的全部 个)极点可以通过 的全部(n个 极点可以通过 选择状态反馈矩阵K的各元素而移至 的各元素而移至S平面 选择状态反馈矩阵 的各元素而移至 平面 任意指定的位置,称该系统是极点可任意配 任意指定的位置 称该系统是极点可任意配 置的。 置的。
• 由(1)和(2)得 和 得
现代控制理论(中南大学)现代控制理论第六章2010

于是,从 v 到 y 的传递函数矩阵 G(s; K, L) 为:
G(s;K,L) C(sI A)1B[I K (sI A)1B]1L G(s)[I K (sI A)1B]1L
2022年3月22日
第六章状态反馈和状态观测器
G(s;K,L) C(sI A)1B[I K (sI A)1B]1L G(s)[I K (sI A)1B]1L
ai(k)
2) 计算理想特征多项式
f (x) (s 1)(s 2) (s n) sn a1*sn1 an*1s an*
3) 列方程组 ai (k) ai*,i 1,, n.并求解 。
其解
k ,[即k1为,所, k求n ]
2022年3月22日
第六章状态反馈和状态观测器
算法2:直接法
闭环系统结构:
v
L
-
y
G(s)
K (sI A)1 B
2022年3月22日
第六章状态反馈和状态观测器
定理 6.1.1 对于任何实常量矩阵 K,系统 K 完全能控的
充要条件是系统 完全能控。 证 注意到系统 和 K 的能控性矩阵分别为
uc [B AB A2B An1B] uc ' [B ( A BK )B ( A BK )2 B ( A BK )n1 B] 由 (A BK)B AB B(KB) ,可知 (A BK)B的列向量可以由 (B AB) 的列向量的线性组合表示。
2022年3月22日
第六章状态反馈和状态观测器
②若 D ,0 则
则闭环系统 K 的结构为:
vL
u
-B
s 1 +
A
Cy
K
K 的状态空间表达式为: K :x (A BK)x BLv y Cx
现代控制理论 状态反馈与状态观测器
• 所谓状态观测器是物理上可以实现的动力 学系统,它在被观测系统输入量和输出量的 激励下,产生一组逼近于被观测系统的状态 变量的输出.
• 这组输出的状态变量便可作为被观测系统 状态变量的估计值.
2.极点配置条件
• 若被控系统0(A, B) 是状态完全能控的,那么 反馈系统的极点必是可以任意配置的,或者 说,能使闭环系统极点任意配置的条件是被 控系统完全可控.
• 注意:
(1).对不可控的系统则不可能采用状态反馈 方法重新配置所有极点. (2).状态反馈可改变系统的极点,但不改变零 点.
• 以上是状态观测器的整个设计思想和目的.
• 估计的模型
xˆAxˆBuG(yCxˆ) (2) (AGC)xˆBuGy
(1).G的选择原则.
由(1)和(2)建立误差方程 定义 exxˆ 则 exxˆ(AG C)e显然误差e的特性是由
(A-GC)的特征值决定,显然G选择的原则是使 e tt1 0,t1 足够地小,从而G的选择也是使 A-GC的特征根按要求放在合适的位置上.
自动控制原理Ⅱ
第六章 状态反馈与状 态观测器
主要讲述:
1).状态反馈. 2).极点配置. 3).状态观测器.
一.系统的状态反馈
• 对于方程
x Ax Bu
y
Cx
• 系统的性质完全是由A决定的,因此要改变 系统的性质,只需改变A的形式.
• 从数学上来讲,即构造u,从而导致下列方程 成立
四、降维观测器设计
x Ax Br
y
Cx
• A 是满足要求的方阵
现代控制实验状态反馈器和状态观测器的设计

现代控制实验状态反馈器和状态观测器的设计现代控制实验中,状态反馈器和状态观测器是设计系统的重要组成部分。
状态反馈器通过测量系统的状态变量,并利用反馈回路将状态变量与控制输入进行耦合,以优化系统的性能指标。
状态观测器则根据系统的输出信息,估计系统的状态变量,以便实时监测系统状态。
本文将分别介绍状态反馈器和状态观测器的设计原理和方法。
一、状态反馈器的设计:状态反馈器的设计目标是通过调整反馈增益矩阵,使得系统的状态变量在给定的性能要求下,达到所需的一组期望值。
其设计步骤如下:1.系统建模:通过对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
通常表示为:ẋ=Ax+Buy=Cx+Du其中,x为系统状态向量,u为控制输入向量,y为系统输出向量,A、B、C、D为系统的状态矩阵。
2.控制器设计:根据系统的动态性能要求,选择一个适当的闭环极点位置,并计算出一个合适的增益矩阵。
常用的设计方法有极点配置法、最优控制法等。
3.状态反馈器设计:根据控制器设计得到的增益矩阵,利用反馈回路将状态变量与控制输入进行耦合。
状态反馈器的输出为:u=-Kx其中,K为状态反馈增益矩阵。
4.性能评估与调整:通过仿真或实验,评估系统的性能表现,并根据需要对状态反馈器的增益矩阵进行调整。
二、状态观测器的设计:状态观测器的设计目标是根据系统的输出信息,通过一个状态估计器,实时估计系统的状态变量。
其设计步骤如下:1.系统建模:同样地,对被控对象进行数学建模,得到描述系统动态行为的状态空间表达式。
2.观测器设计:根据系统的动态性能要求,选择一个合适的观测器极点位置,以及一个合适的观测器增益矩阵。
常用的设计方法有极点配置法、最优观测器法等。
3.状态估计:根据观测器设计得到的增益矩阵,通过观测器估计系统的状态变量。
状态观测器的输出为:x^=L(y-Cx^)其中,L为观测器增益矩阵,x^为状态估计向量。
4.性能评估与调整:通过仿真或实验,评估系统的状态估计精度,并根据需要对观测器的增益矩阵进行调整。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[A-bK]仍为能控标准形,所以只要开环能控,组成状态反馈 系统后仍然能控。
闭环特征多项式: I (A bK) n (an1 kn1 )n-1 ... a0 k0 0
例:设系统的状态空间表达式为
1 2 0 x x u 3 1 1 y 1 2x
s (an1 kn1 )s (a1 k1 )s (a0 k0 ) 0
n
n1
假设闭环系统希望的极点为 ( , ) 1 2 n
希望的特征方程为: ( s 1 )(s 2 )(s 3 ) ( s n ) s n rn 1s n 1 r0 0
K k1 k2
1 k2 k1 k2 2 k1 1 BK k1 k2 ,A BK 2 2k1 2k2 1 2k1 1 2k2
则状态反馈闭环系统的特征多项式为
sI ( A BK )
0
K1
0 K n 1
0 1 0 0 0 0 1 [A bK ] 1 (a n 1 K n 1 ) (a 0 K 0 ) (a 1 K 1 )
0 b 0 1
实际系统与希望系统的特征方程的系数应当相一致。
3、状态反馈阵K的计算步骤
1)判断A,b能控性 2)写出实际的闭环特征方程(传递阵的分母为0的方程)
SI [A bK] 0
3)根据要配置的特征根,写出希望的特征方程
f (s) (s 1 )(s n ) 0
4)对应实际的与希望的特征方程,求出K。 传递函数—可控标准型—极点配置; 状态方程—可控性判别—极点直接配置(A-BK); 状态方程—可控性判别—线性变换—可控标准型—极点配置 逆变换—
而希望的特征多项式为 所以
K k1 k2 4 1
x2 (t ) x1 (t )
由K可画出状态反馈闭环系统的结构图
r (t )
u (t )
2
1
2 1
y (t )
1
4
例:设传递函数为:
G(s)
10 10 3 s( s 1)( s 2) s 3s 2 2s
式中,A为n×n矩阵;B为n×r矩阵;C为m×n矩阵。 状态反馈控制律为
u r Kx
式中,r为r×1参考输入;K为r×n状态反馈阵。对单输入系统,K为1×n的 行向量。 状态反馈闭环系统的状态空间表达式为
( A BK ) x Br x
简记为 K ( A BK ), B, C 。该系统的闭环传递函数阵为
r (t )
u (t )
B
(t ) x
A H
x(t )
C
y (t )
图中受控系统的状态空间表达式为 0 ( A, B, C )的状态空间表达式为
Ax Bu x y Cx
输出反馈控制律为
u r Hy
式中,H为r×m输出反馈阵。对单输出系统,H为r×1的列向量。 输出反馈闭环系统的状态空间表达式为
s 2 k1 1 2k1
1 k2 s 1 2k 2
s 2 (3 k1 2k 2 ) s (2 k1 )( 1 2k2 ) (1 2k1 )( 1 k2 )
(s 1)( s 2) s 2 3s 2 令以上两个特征多项式相等,可解得: k1 4, k2 1
K 10000 1438 96.1
闭环传递函数:
( s )
AV Y( s ) 3 U ( s) s 114.1s 2 1510s 10000
1 ( s ) 则稳态误差:eP lim s(U ( s) Y ( s)) lim s( )0 s 0 s 0 s s AV 10000
y 10 0 0x
I (A bK) 3 (3 k 2 )2 (2 k1 ) k0
( 2)( 1 j )( 1 j ) 3 42 6 4
则 k0 4,k1 4,k2 1
4)闭环传递函数为:
10 ( s) 3 s 4s 2 6s 4
6.2
极点配置
控制系统的稳定性和动态性能主要取决于系统的闭环极点的分布。因此 在进行系统设计时,可以根据对系统性能的要求,规定系统的闭环极点应有 的位置。所谓极点配置,就是通过选择适当的反馈形式和反馈矩阵,使系统 的闭环极点恰好配置在所希望的位置上,以获得所希望的动态性能。
6.2.1 状态反馈极点配置 1、极点配置定理
( A BHC ) x Br x y Cx
简记为 H ( A BHC ), B, C 。该系统的闭环传递函数阵为
GH ( s) C sI A BHC B
1
经过输出反馈后,闭环系统同样没有引入新的状态变量,仅仅是系统矩 阵A变成了( A BHC )。比较这两种反馈形式,若令 K HC , 则 Kx HCx Hy 。因此输出反馈只是状态反馈的一种特殊情况。 6.1.3 闭环系统的能控性和能观测性 上述两种反馈控制,其闭环系统的能控性和能观测性相对于原受控系统 来说,是否发生变化,是关系到能否实现状态控制和状态观测的重要问题。 定理1:状态反馈不改变受控系统 0 ( A, B, C ) 的能控性,但却不一定保持系 统的能观测性。 定理2:输出反馈系统不改变原受控系统 0的能控性和能观测性。
s1, 2 0.707 j7.07
3
非主导极点为: s
10n,取s3 100
闭环特征多项式为:
( 100)(2 14.1 100) 3 114.12 1510 10000
原系统的特征多项式为:3
182 72 0
则 k0 10000,k1 1438,k2 96.1
例:设受控系统传递函数为:
1 1 G( s) 3 s( s 6)( s 12) s 18s 2 72s 综合指标为: % 5%;t S 0.5s,e p 0, 试用状态反馈实现上述指标。
解:将极点配置为一对主导极点和一个非主导极点;根据二阶 系统的性能指标,求出 0.707,n 10。取 0.707,n 10 则,主导极点为:
试用状态反馈使闭环极点配置在 2, 1 j,并写出闭环传递函数。
解:1)根据传递函数,可知SISO系统可控可观; 2) 可控标准型动态方程为:
0 0 0 1 x u, 0 0 x 1 0 0 2 3 1
3)闭环特征多项式为:
第六章 状态反馈和状态观测器
6.1 状态反馈和输出反馈
6.2 极点配置问题
6.3 状态观测器
6.4 带状态观测器的状态反馈系统
在自动控制系统中,反馈控制是最主要的控ቤተ መጻሕፍቲ ባይዱ方式,状态空间设计也不 例外。因此本章主要讨论在状态空间设计中两种常用的设计方法:状态反馈 和输出反馈。
6.1
6.1.1 状态反馈
状态反馈和输出反馈
(2)输出反馈至参考输入,系统的结构图如下
r (t ) u (t )
B
(t ) x
A
H
x(t )
C
y (t )
其中
u r Hy
( A BHC ) x Br x y Cx
则输出反馈闭环系统的状态空间表达式为
定理:对完全能控的受控系统(A,B,C),不能采用输出线性反馈来实现闭 环极点的任意配置。
例:已知系统的状态空间表达式为
2 1 1 x x u 1 1 2 y 1 0x
试求使状态反馈系统具有极点为-1和-2的状态反馈阵K。
解:因为
rank B
1 4 AB rank 2n 2 1
所以原系统是完全能控的,通过状态反馈可以实现任意的极点配置。设
A H
x(t )
C
y (t )
该受控系统的状态空间表达式为
Ax Bu x y Cx
则输出反馈闭环系统为
Ax Bu Hy x y Cx
即
( A HC ) x Bu x y Cx
定理:采用输出至状态微分的反馈可任意配置闭环极点的充要条件是:受控 系统状态完全能观测。
试分析系统引入状态反馈 K 3 1 后的能控性和能观测性。
解:容易判断原系统是能控且能观测的。引入 K 3 1后,闭环系统 K 的状态空间表达式为
1 x 0 y 1
2 0 x r 0 1
2x
不难判断,系统 K 是能控的,但不是能观测的。可见引入状态反馈 K 3 1 后,闭环系统保持了能控性不变,而不能保持能观测性。
y Cx
GK ( s) CsI ( A BK ) B
1
经过状态反馈后,系数矩阵C和B没有变化,仅仅是系统矩阵A发生了变 化,变成了 ( A BK )。也就是说状态反馈矩阵K的引入,没有增加新的状态 变量,也没有增加系统的维数,但可以通过K阵的选择自由地改变闭环系统 的特征值,从而使系统达到所要求的性能。 6.1.2 输出反馈 输出反馈是将受控系统的输出变量,按照线性反馈规律反馈到输入端, 构成闭环系统。这种控制规律称为输出反馈。经典控制理论中所讨论的反馈 就是这种反馈,其结构图如下 :
定理:受控系统 0 ( A, B, C ) 利用状态反馈矩阵K,能使其闭环极点任意配置 的充要条件是受控系统0 完全能控。
2、极点配置方法 一个系统完全能控条件下,状态反馈阵K如何确定。
开环系统的特征方程: s n an1s n1 a1s a0 0