汽车ESP系统半动态测试台架开发
ESP电子稳定系统的结构及各部件的功用

发表于:昨天 23:00 | 分类:汽车阅读:(8) 评论:(0)一、ESP电子稳定系统的结构及各部件的功用奥迪A4汽车电子稳定系统(ESP)的组成大致可分为传感信号部分、控制单元和执行控制部分,其组成如图1所示,其系统电路图如图2所示,其油路控制过程如图3所示。
下面简要介绍各部件的结构及功能。
1、控制单元J104控制单元J104主要负责整个系统的信息运算分析和控制指令的发出,为了保障系统的可靠性,在系统中有2个处理器,二者都用同样的软件处理信号数据,并相互监控比较。
如果控制单元出现故障,驾驶者仍可做一般的制动操作,但ABS、EDL、EBD、TCS、ESP等功能都将失效,这时可诊断出“控制单元故障”或“供电电压故障”的故障存储。
2、方向盘转角传感器G85方向盘转角传感器G85是依据光栅原理进行角度的测量,G85位于转向灯开关总成和方向盘之间,集成在安全气囊的螺旋电缆内,该传感器根据驾驶员操纵方向盘的不同程度,向控制单元传送方向盘转动的角度,测量的角度范围是±540°,对应方向盘转3圈。
如果该传感器无信号,则车辆无法确定行驶方向,ESP将失效,这时可诊断出“传感器无信号”、“设定错误”、“电子故障”、“不可靠信号”等故障存储。
3、侧向加速度传感器G200侧向加速度传感器G200可以确定车辆是否受到使车辆发生滑移作用的侧向力,以及侧向力的大小。
如果无该信号,控制单元将无法计算出车辆的实际行驶状态,ESP功能将失效,可以诊断出“线路断路”、“对正极、负极短路”、“传感器损坏”等故障。
4、横摆率传感器G202横摆率传感器G202主要是用以确定车辆是否沿垂直轴线发生转动,并给控制单元提供转动速率。
如果没有横摆率测量值,控制单元无法测量车辆是否发生转向,ESP功能将失效,可以诊断出“线路断路”、“对正极、负极短路”、“传感器损坏”等故障。
在实际结构中,二者集成在一起,共同安装在一个舱盒内,位于前仪表台内,为车辆的重心位置,这样既可以减小安装尺寸,又能保证精确的配合数值,而且不改变。
汽车ESP硬件在环仿真试验台搭建毕业论文

汽车ESP硬件在环仿真试验台搭建毕业论文目录第1章绪论 (1)1.1选题意义及背景 (1)1.1.1汽车电子产品的开发方法与硬件在环仿真 (1)1.1.2车身电子控制与汽车主动安全的发展与研究 (2)1.1.3本文研究的主要容 (2)1.2硬件在环仿真基础理论 (2)1.2.1硬件在环仿真的概念 (3)1.2.2硬件在环仿真的开发背景与优点 (3)1.2.3硬件在环仿真的形式及组成部分 (4)1.3汽车防抱死制动系统(ABS) (6)1.3.1 ABS的基本工作原理 (6)1.3.2 ABS硬件在环仿真的实现 (8)1.4汽车电子稳定性程序(ESP) (9)1.4.1 ESP的基本工作原理 (9)1.4.2 ESP硬件在环仿真的实现方法 (10)1.5本文研究容 (14)第2章试验台的硬件建设 (15)2.1 试验台硬件系统总体方案 (15)2.1.1 ABS/ ESP的比较 (15)2.2.2 ESP的硬件在环仿真实验台方案 (15)2.2 Dspace实时仿真系统 (15)2.3 液压控制单元 (17)2.4 制动系统与操纵系统 (18)2.5 传感器 (18)2.6 信号采集电路 (20)2.6.1 限幅电路 (20)2.6.2 滤波电路 (21)2.6.3 隔离电路 (21)2.6.4 信号采集电路 (22)2.7 实验台架 (22)2.8 其他硬件 (24)第3章试验台的软件建设 (25)3.1 车身二自由度操纵稳定性数学模型 (25)3.2 车辆两轮三自由度直线行驶数学模型 (29)3.2.1 车身模型 (29)3.2.2 轮胎模型 (31)3.2.3 动力传动系模型 (32)3.2.4 车辆两轮三自由度数学模型 (35)3.3 车辆四轮七自由度数学模型 (35)3.3.1 车身模型 (36)3.3.2 轮胎模型 (42)3.3.3 动力传动系模型 (44)3.3.4 制动器模型 (46)3.3.5 车辆四轮七自由度数学模型 (46)第4章仿真结果分析 (48)4.1 基于Matlab/Simulink的离线仿真 (48)4.1.1 模型参数设定 (48)4.1.2 油门控制车辆直线加减速工况仿真 (49)4.1.3 制动轮缸压力控制车辆直线加减速工况仿真 (53)4.1.4 转向角控制车辆稳态转向工况仿真 (54)4.2 基于Dspace的实时仿真 (59)4.2.1 Matlab/Simulink与Dspace的无缝连接 (59)4.2.2 无I/O接口的实时仿真 (60)4.2.3 有I/O接口的实时仿真 (63)4.2.4 仿真结果分析 (66)第5章全文总结与工作展望 (67)致谢 (68)参考文献 (69)附录 (71)第1章绪论1.1选题意义及背景1.1.1汽车电子产品的开发方法与硬件在环仿真近年来,人们对提高汽车的动力性和经济性以及降低排放的呼声越来越强,同时对汽车的安全性和舒适性的要求也越来越高,这种趋势促进了汽车技术,尤其是汽车控制技术的发展。
某车型ESP动态性能检测故障问题探讨

2 案例
近 期, 某 汽 车 厂 生 产 基 地 二 期 工 厂 整 车 检测线反馈近一周累计发现批量 CN201M 车 型 在 进 行 动 态 性 能 检 测 时(Dynamic vehicle test,以下简称 DVT),设备提示 ESP 右前轮 及左后轮增压力不足,转毂测试要求增压力> 800N,而设备检测结果只有 200-500N,累计 数量已经达到 100 台。
加注工艺无差异,ESP 功能检测结果正常。制 动液加注工艺对问题的影响基本排除。
(2)ESP 功能检测:将二期检测设备判 定不合格的车辆使用一期设备进行检测,85% 的车辆检测结果合格,遂将检测设备作为影响 该问题的要因。根据一、二期检测结果的差异 对比,解决方向聚集在两种检测设备软件的数 据采集逻辑和算法上。经过对比分析发现两种 设备在进行增减压力检测时的方法不同。福瑞 FRB1000 型进行 ESP 增压力测试方法为:每 个轮增压检测时,设备向车辆发送增压指令, 设备单个增压脉冲 80ms,最多 5 ห้องสมุดไป่ตู้循环。宝 克 3700 型进行 ESP 增压力测试方法为:每个 轮增压检测时,设备向车辆发送单个连续增压 指令,增压时间 170ms,。相比而言,理论上 FRB1000 型最大增压时间可以达到 400ms, 3700 型只有 170ms,而增压力大小又与增加 时间成正比。如图 3 所示。故检测设备的增压 力测试方法是影响该问题的要因。
汽车ESP硬件与驾驶员在回路仿真试验台的开发与应用

2006年(第28卷)第4期汽 车 工 程A uto m otive Eng i neer i ng2006(V o.l 28)N o .42006075汽车ESP 硬件与驾驶员在回路仿真试验台的开发与应用**吉林大学/985工程0汽车工程创新平台和吉林大学青年教师基金资助。
原稿收到日期为2004年12月1日,修改稿收到日期为2005年7月1日。
丁海涛,郭孔辉,张建伟,付 皓,吕济明(吉林大学,汽车动态模拟国家重点实验室,长春 130025)[摘要] 利用汽车驾驶模拟器技术和硬件在回路仿真技术,建立了汽车电子稳定性系统(ESP )硬件与驾驶员在回路仿真试验台。
利用该试验台进行了包含ESP 执行硬件和驾驶员的/人车环境0闭环仿真,验证了试验台的基本功能。
该试验台为汽车ESP 的开发提供了一个功能比较完备的快速开发平台。
关键词:汽车电子稳定性系统,硬件在回路仿真,驾驶模拟器D evel op m ent and App li cation of the H ard ware and D ri ver -i n -the -loopTest R i g for Au t o m oti ve E lectronic Stab ilit y Progra m sD ing H aitao ,Guo K onghu,i Zhang Jianwe,i Fu Hao&L ôJi m ingJ ilin Un i v ersit y ,S tate K e y Labora tory of Au to mobile Dynam ic S i mu l a tion,Changchun 130025[Abstrac t ] A har dw are and dri v er -i n -the -l o op test ri g for auto m o ti v e e lectron ic stability prog ra m s (ESP)is built based on t h e techno log ies o f driv i n g si m u lator and hardw are -i n -the -loop si m ulati o n .A /hum an -vehic le -env-i ronm en t 0closed -loop si m ulation is conducted on the test ri g .The resu lt verifies the basic functi o ns of test rig ,w hich provides a rapi d develop m ent p latfor m for auto m otive ESP .K eyw ords :Auto m otive ESP ,H ardware -i n -t he -loop si m ulation ,D riving si m ul a tor1 前言汽车电子稳定性系统(electr onic stability pro -gra m ,ESP)是一种提高汽车主动安全性的电子控制系统。
汽车ESP系统半动态测试台架开发

ቤተ መጻሕፍቲ ባይዱ
上海交通大学硕士学位论文
摘要
汽车 ESP 系统半动态测试台架开发 摘 要
汽车操作稳定性控制系统(ESP)作为现代汽车上最具有代表性的 主动安全装置 其作用和优点受到研究人员的日益关注 现在汽车上 ESP 的应用也越来越多 ESP 能最大程度地保证汽车在急速变道过程 中的操纵性和方向稳定性 另一方面 由于 ESP 是汽车中关键的安全 部件 必须首先保证其有足够的可靠性 同时 由于现在汽车已经成 为微利产品 因此 ESP 的成本也不能太高 这对 ESP 提出了更高的要 求 经过几十年的发展 ESP 的技术已基本成熟 产品也已基本定型 但其核心的控制逻辑技术是严格保密的 不可能从公开发表的资料中 获取 为提高国内汽车零部件企业的竞争力及掌握高新技术的能力 本文结合上海汇 汽车操纵稳定
在实时仿真过程中 可在线修改
ESP 的控制策略和算法 并即时对比控制器的控制品质 最终得到最 佳的控制策略和算法 可以省去实车试验的部分工作
本文中的 ESP 实验台上预留了可供扩展的软硬件接口 通过进一 步扩展得到功能更为完整的 ESP 混合仿真模拟实验台 比如增加车轮 转鼓实验台后 用转鼓模拟路面 完全模拟车辆制动过程中 ESP 的工 作过程 在实验室内相对较为全面地研究 ESP 的工作特性
本文的研究工作为进一步全面研究 ESP 产品化提供了可供借鉴 的电子开发平台 同时也对提高我国 ESP 研究开发能力提供一定的帮 助 关键词 操纵稳定系统(ESP) ESP 电子开发 硬件在环仿真技术 ESP 控制逻辑
上海交通大学硕士学位论文
汽车ABS性能的台架测试方法研究的开题报告

汽车ABS性能的台架测试方法研究的开题报告一、研究背景近年来,随着汽车工业的不断发展和技术的不断进步,汽车的安全性能也越来越重要。
汽车ABS(防抱死系统)是一种在制动时对车轮进行控制的电子装置,能够在制动时防止车轮抱死,使车辆制动稳定,提高了制动性能和安全性能。
因此,对汽车ABS性能的测试方法研究具有实际应用价值。
二、研究目的本研究旨在探索汽车ABS性能的台架测试方法,从而提高测试效率和精度,进一步提高汽车的安全性能。
三、研究内容本研究的主要内容包括:1. 汽车ABS性能测试的基本原理和方法研究。
2. 台架测试技术的研究,包括测量传感器的选取、数据的采集和处理等。
3. 台架测试系统的设计与实现。
4. 汽车ABS性能的台架测试实验。
四、研究方法本研究采用实验研究方法,通过对汽车ABS性能的台架测试实验进行分析,从而得出研究结论。
五、研究进度安排1. 第一阶段:2021年7月-2021年8月研究汽车ABS性能测试的基本原理和方法,查阅相关文献,建立理论框架。
2. 第二阶段:2021年9月-2021年10月研究台架测试技术,包括测量传感器的选取、数据的采集和处理等。
3. 第三阶段:2021年11月-2022年1月设计与实现台架测试系统。
4. 第四阶段:2022年2月-2022年4月进行汽车ABS性能的台架测试实验,同时对实验数据进行分析和处理。
5. 第五阶段:2022年5月-2022年6月完成论文撰写和答辩准备。
六、预期成果1. 完成汽车ABS性能测试的台架测试方法研究。
2. 设计台架测试系统,实现汽车ABS性能测试。
3. 完成实验数据分析和处理。
4. 撰写开题报告和毕业论文,完成答辩。
七、研究意义本研究的意义在于:1. 提高实验测试效率和精度,进一步提高汽车ABS性能的安全性能。
2. 推动台架测试技术的发展,为汽车电子控制技术的研究提供基础和方法。
3. 为实现汽车智能制造提供技术支持。
ESP系统的发展和应用研究

第一章研究汽车ESP控制系统的意义从汽车诞生时起,汽车的安全性就扮演着至关重要的角色。
近年来随着汽车行驶速度的提高及道路行车密度的增大,交通事故的发生率逐年上升.据德国保险业协会、汽车安全学会分析了导致严重伤亡交通事故的原因后的研究显示:60%的死亡交通事故是由于侧面撞车引起的,30%-40%是由于超速行驶、突然转向或操作不当引发的。
最大限度地减少汽车交通事故是车辆工程和相关领域解决的重要科技问题。
在我国,随着国民经济的快速增长,人民生活水平的不断提高及安全意识的增强,汽车工业和交通运输事业的不断向高层次发展,对汽车安全性必将提出新的要求。
改进汽车的安全性不仅可减少汽车交通事故和人员的伤亡及经济损失,并直接影响交通运输环境和人民生活的安定。
所以全方位、可靠地提高汽车的安全性能就成为摆在汽车设计、开发及科研人员面前一项紧迫而艰巨的任务。
汽车的安全性能从总体上来说可分为主动安全性和被动安全性。
主动安全性主要是根据汽车设计和汽车理论对汽车内部构造进行合理、有效的设计来主动预防事故发生。
具有代表性的有汽车防抱死系统和汽车驱动防滑系统。
被动安全性主要是指汽车发生碰撞和意外时,通过车内的保护系统(如吸震装置,联动锁紧装置以及其它附属装置)来有效地保护乘客,使伤害减少到最低程度.具有代表性的有乘客系绊系统,安全气囊.目前关于汽车制动的研究主要集中在制动控制方面,包括制动控制的理论和方法,以及采用新的控制技术[2].汽车防抱死制动系统(ABS)是根据不同滑移率下所对应的轮胎-地面的附着特性来调节制动压力来防止汽车制动时的车轮抱死。
通过充分利用地面附着系数而获得较高的地面制动力和侧向力,缩短汽车的制动距离,提高汽车制动的方向稳定性,减少轮胎磨损。
该项技术在提高汽车安全、减少事故损失和提高汽车运行经济性方面发挥了重要作用,是汽车行业最重要的主动安全技术之一。
汽车驱动防滑控制(Anti Slip Regulation)系统简称ASR,又称为牵引力控制系统(Traction Control System),简称TCS或TRC。
ESP功能模块技术开发流程性能测试全面解析
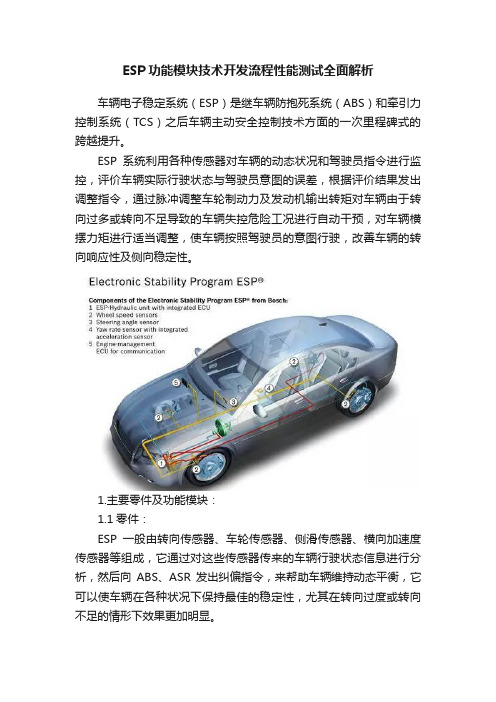
ESP功能模块技术开发流程性能测试全面解析车辆电子稳定系统(ESP)是继车辆防抱死系统(ABS)和牵引力控制系统(TCS)之后车辆主动安全控制技术方面的一次里程碑式的跨越提升。
ESP系统利用各种传感器对车辆的动态状况和驾驶员指令进行监控,评价车辆实际行驶状态与驾驶员意图的误差,根据评价结果发出调整指令,通过脉冲调整车轮制动力及发动机输出转矩对车辆由于转向过多或转向不足导致的车辆失控危险工况进行自动干预,对车辆横摆力矩进行适当调整,使车辆按照驾驶员的意图行驶,改善车辆的转向响应性及侧向稳定性。
1.主要零件及功能模块:1.1零件:ESP一般由转向传感器、车轮传感器、侧滑传感器、横向加速度传感器等组成,它通过对这些传感器传来的车辆行驶状态信息进行分析,然后向ABS、ASR发出纠偏指令,来帮助车辆维持动态平衡,它可以使车辆在各种状况下保持最佳的稳定性,尤其在转向过度或转向不足的情形下效果更加明显。
ESP系统最基本的组成原件1.2零件主要功能模块:1.实现左右车轮制动力按需发配自动对各车轴或各车桥组的某个车轴左右两侧车轮的制动力矩进行单独控制,使车辆产生横摆力矩以改善车辆的方向稳定性2.限制过度转向和不足转向:在对车辆实际状态与驾驶员希望达到的车辆状态进行对比评估的基础上,通过计算机闭环控制来限制车辆过度转向和不足转向。
3.估算侧偏角以及变化率汽车转弯时,前后轮都会产生侧偏角。
前后轮的侧偏角如果不同,会出现转向不足或者过度的现象。
该系统能够直接测定车辆横摆角速度,并估算侧偏角或侧偏角随时间的变化率。
4.调整车辆的驱动力矩能够监控驾驶员的转向输入;其算法应能够判断是否需要并能够在必要时调整车辆的驱动力矩,辅助驾驶员保持对车辆的控制(相同情况下车辆有无ESP的对比)2.影响ESP效果主要因素首先ESP的控制效果不单纯是电子系统的因素,而是受到车辆本身综合作用的影响:不同的车型、不同的重心高度、不同的轮胎、不同的前后配重以及不同的悬挂调校都会对ESC的效果产生巨大影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上海交通大学硕士学位论文
摘要
mixed simulation test table of ESP is established. The HiL (Hardware in the Loop) technology is one of the current popular design methods. It has been used in the automotive industry field commonly. The HiL technology becomes more and more mature following with the technology development of computer control, electronics and sensors etc. In this paper, the author established the mixed simulation test table for ESP with the help of the HiL technology. The hardware such as brake system and electromagnet valve are embed on the test table. The author took part in the designing of software, interface between hardware and software and driving circuit that used on the test table, which are based on the product of NI(National Instruments). At last the ESP electronic development plat is founded based on the hardware environment. Applying the established ESP test table, during real-time simulation, the control algorithm could be modified on-line and the result could be seen in time. At last we could get the optical control algorithm and replace some vehicle works. The ESP test table has left some pre-expanding interfaces for software and hardware. The test table could expand to an entire ESP mixed simulation test table, such as after adding the tyre spin-drum, the vehicle’s braking phase could be simulated in the lab. The researchers could study the characteristics of ESP in details.
上海交通大学硕士学位论文
摘要
据 可以检验现有 ESP 产品性能 可以初始匹配 ESP 控制参数 为实 车试验提供一定的依据 最大程度地节省实车试验的时间和费用 缩 短 ESP 开发周期
硬件在环仿真 (HiL) 技术是现今较为流行的现代设计方法之 一 在汽车行业的应用尤为广泛 随着作为进一步全面研究 ESP 产品化提供了可供借鉴 的电子开发平台 同时也对提高我国 ESP 研究开发能力提供一定的帮 助 关键词 操纵稳定系统(ESP) ESP 电子开发 硬件在环仿真技术 ESP 控制逻辑
上海交通大学硕士学位论文
摘要
ABSTRACT
As the typical active security implement of the vehicle, the ESP (Electronic stability program) is now attracting more attention of the researchers. ESP is also used on the vehicle more and more. ESP assists the driver by improving steer-ability and stability, by reducing the danger of the vehicle skidding substantially and establishing a predictable vehicle behavior adjusted to the driver’s experience. In the other hand, as the security implement, ESP should have enough safety and security. Now because the profit of car is very little, ESP should not cost too much of the car. Now ESP has become the successful technology, the products have supplied to many automotive producers. But the control logic of ESP is hold strictly by ESP makers. We couldn’t find much more information of ESP from published papers. In order to improve the competitive and ability to catch high-tech of Chinese automotive suppliers, and deal with the challenge of China entry WTO (World Trade Organization), this paper is carried out around the project “The research of applied technology and vehicle test of Electronic stability program”, which is the key project of RDC (Research & Development Center) of Shanghai Huizhong Automotive Cooperation. In this paper, the hardware environment needed to develop the ESP product, the ESP electronic development plat
上海交通大学 硕士学位论文 汽车ESP系统半动态测试台架开发 姓名:王家辉 申请学位级别:硕士 专业:车辆工程 指导教师:张建武;殷承良 20040201
上海交通大学硕士学位论文
摘要
汽车 ESP 系统半动态测试台架开发 摘 要
汽车操作稳定性控制系统(ESP)作为现代汽车上最具有代表性的 主动安全装置 其作用和优点受到研究人员的日益关注 现在汽车上 ESP 的应用也越来越多 ESP 能最大程度地保证汽车在急速变道过程 中的操纵性和方向稳定性 另一方面 由于 ESP 是汽车中关键的安全 部件 必须首先保证其有足够的可靠性 同时 由于现在汽车已经成 为微利产品 因此 ESP 的成本也不能太高 这对 ESP 提出了更高的要 求 经过几十年的发展 ESP 的技术已基本成熟 产品也已基本定型 但其核心的控制逻辑技术是严格保密的 不可能从公开发表的资料中 获取 为提高国内汽车零部件企业的竞争力及掌握高新技术的能力 本文结合上海汇 汽车操纵稳定
学位论文作者签名: 王家辉
日期:2004 年 2 月 12 日
上海交通大学 学位论文版权使用授权书
本学位论文作者完全了解学校有关保留、使用学位论文的规定, 同意学校保留并向国家有关部门或机构送交论文的复印件和电子版, 允许论文被查阅和借阅。 本人授权上海交通大学可以将本学位论文的 全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫 描等复制手段保存和汇编本学位论文。 保密 □,在 年解密后适用本授权书。 本学位论文属于 不保密 □。 (请在以上方框内打“√ ” ) 学位论文作者签名:王家辉 指导教师签名:张健武 日期: 2004 年 2 月 12 日 日期:2004 年 2 月 12 日
上海交通大学硕士学位论文
第一章
绪论
第一章
1 选题背景
绪论
随着经济飞速发展 道路交通条件的改善以及汽车技术的进步 现代汽车的 行驶车速得到极大提高 但是恶性交通事故的 90%是因车辆在高速行驶时失稳所 造成的 如何提高汽车行驶安全性是现代汽车研究的重要课题之一 汽车的安全 性包括两个方面 主动安全性和被动安全性 主动安全性是知如何通过车辆设计 尽量减少或避免交通事故的发生 被动安全性是指通过车辆的设计使车辆在发生 事故时尽量减少对乘员的伤害 近年来 汽车主动安全技术领域中的汽车行驶稳 定性控制技术日益受到重视 并且逐步发展为汽车主动安全技术领域研究应用的 热点 汽车制动防抱系统 ESP 自从上世纪七十年代就开始在汽车上使用 它一 方面通过对车轮制动滑移率的控制来防止车轮抱死 另一方面提高制动车轮的侧 向附着能力 在很大程度上改善了汽车制动时的侧向稳定性 随着电子技术和计 算机技术的飞速发展 ESP 的可靠性在不断增强的同时成本也大大降低 与此同 时 汽车法规对汽车的安全性要求更为严格 在发达国家 ESP 已经成为现代汽 ASR 通过对驱
应对我国汽车企业加入世界贸易组织(WTO)的挑战 众汽车制造有限公司研究开发中心的重点攻关项目 性系统(ESP)实用化技术研究及实车试验研究