测量景深
双camera景深计算(1)

双camera景深计算(1)前⾯介绍了双camera能实现的功能中其中很⼤的⼀类都是依赖于景深的计算。
现在这类功能在⼿机上的应⽤也是相对成熟的。
在这类功能中景深的计算是很重要的,如何计算景深,计算的准确性和性能都是决定最后能够实现什么样功能的关键。
很多⼈都会说其实我们从⼀张照⽚中也能看出哪个物体在前,哪个物体在后。
这其实这是建⽴在我们⼤脑的⼀些视觉经验的基础上。
⽐如近⼤远⼩,⼜⽐如物体影⼦的位置。
这些经验确实很重要,但是在实际的计算机视觉中很难使⽤相同的⽅法,并且在很多情况即使⼈眼也没有办法分辨景深。
⽐如说下⾯这个⽹上很热的图,哪个楼在前。
还有下图这种情况,利⽤平⾯上的图像在特殊的视觉⾓度。
造成⼈的虚假3D视觉。
在仅仅从张图⽚中看在⼀条直线上的物体,很多不同距离的点再图⽚上映射的位置其实是⼀个。
如下图的P和Q。
光从照⽚⽆法得到距离信息。
⽽在实际场景,⼈眼分辨景深主要是依靠双⽬视觉分辨景深。
这和双camera分辨景深的原理⼀样。
主要⽅法是依靠三⾓定位的⽅法如下图。
不过需要注意的是,下⾯这个公式是基于两个平⾏的完全相同的camera实现的。
从公式中可以得判断Z的距离中d和X的⼤⼩很关键.两个摄像头间的距离D很重要减少D的距离不仅会减少能测量的最⼤距离⽽且会减少相对景深间精度。
⽽X的精度更多取决于像素的⼤⼩。
在实际计算中不会⼩于⼀个像素。
实际计算中有的时候会将最⼤和最⼩距离间分割成多个不同平⾯。
每个平⾯之间的精度由算法的实际精度决定。
这样可以较少⼀些在景深计算中误差导致的精度的问题。
上⾯的公式是基于两个平⾏的相同camera的。
但是实际使⽤的时候实际上有很多问题。
⽐如在上图两个camera计算景深中总有⼀部分场景不能相交。
因此实际的为了景深计算两个camera的FOV设计会不⼀样。
主camera是⽤来取实际图的,副camera的图像主要是⽤来参考计算景深。
副camera的FOV⼀般会⼤于主camera. 但是即使是这样距离较近的物体依然有可能不同时在两个camera图像当中。
摄影测量名词解释

摄影测量名词解释1、2、3、4、照片的内部方向元素:确定摄影物镜后部节点与照片平面之间关系的数据。
摄影基线:两个相邻摄影站之间的距离为摄影基线。
核面:摄影基线与地面任一点组成的平面称为该平面的核面。
数字图像重采样:由于数字影响是一个规则的灰色格子序列,在处理数字图像时,获得的点正好落在原始图像的像素中心。
为了获得该点的灰度值,需要在原始采样的基础上再次采样。
5、6、7、8、9、10、11、12、13、14、15、16、照片主距离:从照片主点到物镜后面节点的距离。
平高点:既做平面控制,又做高程控制的像方控制点。
景深:摄影时物体成像清晰的最远点与最近点的纵深距离。
相对航高:摄影物镜相对于某一基准的高度合并线:真实水平面和图像平面之间的交线称为合并线,也称为真实水平线。
像片比例尺:航摄像片上一线段为l的影像与地面上相应线段的水平距离l之比。
绝对航高:是相对干平均海平面的航高,是指摄影物镜在摄影瞬间的真实海拔高度。
中心投影:投影光线会聚于一点的投影称为中心投影。
平行投影:投影光线相互平行的投影为平行投影航向重叠:同一条航线上相邻两张像片的重叠度旁向重叠:相邻航线相邻两像片的重叠度照片倾斜:拍摄时,相机的主轴大致垂直于地面,与铅垂线的夹角小于2~3度。
夹角是照片的倾斜度。
17、像片的方位元素:确定摄影瞬间摄影物镜(摄影中心)与像片在地面设定的空间坐标系中的位置与姿态的参数,即确定这三者之间相关位置的参数18、19、20、21、像片的内方位元素:表示摄影中心与像片之间相互位置的参数,f,x0,y0像片的外方位元素:表示摄影中心和像片在地面坐标系中的位置和姿态的参数。
核线相关:沿核线寻找同名像点,即核线相关。
相对定向:根据立体像对的内部几何关系恢复两张照片之间的相对位置和姿态,使同名光对相交,建立与地面相似的立体模型。
也就是说,确定一对立体像的两幅图像的相对位置。
22、23、绝对方位元素:描述摄影时立体对的绝对位置和姿态的参数称为绝对方位元素单像空间后方交会:利用至少三个已知地面控制点的坐标,与其影像上对应三个像点的影像坐标,根据共线条件方程,反求该像片的外方位元素。
[资料]镜头焦距和景深
![[资料]镜头焦距和景深](https://img.taocdn.com/s3/m/ece401ee453610661fd9f482.png)
[资料]镜头焦距和景深1. 镜头焦距是一个固定的物理尺寸,是多少毫米,就是多少毫米,100mm就是100mm,不会变成150mm,不会随着相机的画幅不同而改变;2. 相同焦距的镜头放在不同画幅的相机上,画幅越大,视角越大,画幅越小,视角越小;3. 相同画幅的机身,如果镜头焦距越长,景深越浅(短),焦距越短,景深越大(或者说越深、越长)。
要搞明白这些道理,首先要搞懂基本概念。
【下面先说说焦距、视角和画幅】通俗地说,镜头焦距是指从镜头光心(单片镜头的中心或多片镜头的成像中心)到焦平面的距离。
焦平面是相机里的成像面或感光面。
这个感光面从早期使用的干板式玻璃片式的底板,到后来的软片式的胶片底板,一直发展到现在数码相机所使用的CCD、超级CCD或CMOS等感光器件。
这个成像面的尺寸规格就是我们所说的画幅。
通过上面的定义不难看出,镜头焦距实际上是一段距离长度,而且是一个不会改变的固定长度,是一个物理尺寸。
不论你的105mm镜头放在DX画幅的D300上,还是放在FX全画幅的D3上,这段物理距离都是固定的,没有发生任何改变。
发生改变的只是你的相机焦平面(即CMOS)的大小而已。
这个焦平面越大,视角也越大,也就是说所能容纳的拍摄场景越大,反之视角越小,容纳的场景越小。
换一句话说,同样的拍摄对象,使用同样焦距的镜头,当焦平面是全画幅时,感光面积大,所得到的拍摄对象就更全面一些,如果是DX画幅,感光面积小了,拍摄对象的四周的一部分被剪裁到画面外,因此得到的成像则就更局部一些了。
这是从相同焦距的镜头放在不同画幅相机的角度上说的。
下面我们换一种方法,看看用相同画幅的相机使用不同焦距的镜头是什么结果。
如果我们使用相同画幅的相机,不论是D3还是D300,在同样的拍摄距离,用100mm的镜头拍摄之后再用150mm的镜头拍摄。
我们会发现用150mm镜头拍摄时,只能拍到100mm镜头画面中的一部分。
结果和上面使用不同画幅相机一样,视角小了。
孔径光阑

实验三 孔径光阑、视场光阑和景深实验此为一个设计性实验。
引言孔径光阑、视场光阑和景深是几何光学中很重要的概念,也是光学设计,光学装调必须考虑的问题,它们关系到光学系统像面的照度,成像范围,系统的像差,分辨率和成像质量等。
同时,这些概念又是几何光学学习的难点。
因此,安排此实验是很有必要的。
一、实验目的1、深入理解孔径光阑(入、出瞳),视场光阑(入、出窗)及景深的概念2、学会确定孔径光阑,视场光阑及测量景深的方法二、实验原理理想光学系统可以对任意大的物体范围以任意宽的光束进行完善成像,实际光学系统不可能为无限大,进入系统的光线将受到光学元件有限的通光口径的限制。
任何一个光学系统对光束都包含两个基本限制:对入射的光束大小的限制和对成像范围的限制。
如照相系统中常采用的光圈(F)这一术语,指的就是对光束的一种限制,改变光圈的大小可以控制进入系统的光能,配合速度来满足接收器所需的曝光量。
又如,照相机中的接收器的边界框(如135胶片,1/3〞CCD等)也是对光束的一种限制,聚焦在胶片框或CCD靶面外的像点将不能获得图像。
光束的限制不仅决定了光学系统的光束宽度和像的大小,而且还决定了光学系统对物体细节的分辨力和系统的景深,同时对系统的像差也有很大影响。
2.1光阑的分类在光学系统中,对光束起限制作用的光学元件称为光阑。
它们可能出自某一透镜的边框,也可能是专门设计的任一形状的光孔器件。
根据各种光阑限制光束的目的,它们大体分为几种:1 孔径光阑光学系统中用于限制轴上点成像光束大小的光阑称为孔径光阑,如照相机中的可调光圈就是该系统的孔径光阑。
孔径光阑的大小决定成像面上的照度。
在光学系统中,描述成像光束大小的参量称为孔径,系统对近距离物体成像时,其孔径大小用孔径角U表示,对无限远物体成像时,孔径大小用孔径高度h表示。
2 视场光阑光学系统中用于限制成像范围大小的光阑称为视场光阑,如照相机中的底片框就是系统的视场光阑。
光学系统中描述成像范围大小的参量称为视场,系统对近距离物体成像时,视场的大小一般用物体的高度y表示,对远距离物体成像时,视场大小用视场角表示。
《大学物理实验》必做实验实验要求

3#206水银温度计的校正与热电偶定标一、实验目的1、学习水银温度计00和1000点的校正法及温度计温标分度修正值的计算法。
2、 学习福廷气压计的使用法。
3、了解热电偶测温的原理4、学习热电偶定标方法。
二、实验仪器热电偶(铜一康铜)、毫伏表、保温杯、加热器、搅拌器、冰、水银温度计,福廷气压计 三、实验内容(一)水银温度计的校正(定点法校正水银温度计) 1、00C 点a 0的确定。
2、沸点a 100的确定。
3、计算原温标每一分度值的改正值t(1)在福廷气压计上记录温度t 及气压读数h t ,并进行修正(福廷气压计使用法,参阅第三章第一节):(2)查附录表,确定大气压为H 0时所对应的水沸点a'100(3)利用公式得到改正值: 4(二)热电偶定标1、按定标装置图接好实验电路。
2、参考端置冰水混合物。
3、测量端加热至沸点,在温度-电压表格中记录标准温度计与数字毫伏表对应参数值。
4、切断加热器电源,在测量端降温过程中,等间隔记录温度-电压格组参数值至室温。
5、制热电偶定标曲线(温度-电压曲线)。
四、数据处理1、通过两点法得到温度计的温度校正表,并指出所使用温度计的最大误差。
2、绘制热电偶定标曲线,分析所使用热电偶的温度特性,画图法得到热电偶灵敏度K ,并给出该热电偶电势差随温度变化的关系式。
温参考端水混合物3#206金属线胀系数的测量一、实验目的1、 掌握千分尺测量长度的微小变化量的方法。
2、 了解PID 控温调节的原理,掌握控制实验温度的方法。
二、实验仪器控温式固体线胀系数测定仪、待测金属管、千分尺。
三、实验内容1、 用PID 控温仪控制实验温度;2、 用千分尺测量长度的微小变化量铜管的线膨胀系数。
四、实验提示1、0 标准值参阅总附录表18。
2、设置高温点2t ,到达该温度后,加热器电源切断,短时间内但温度仍然会上升,注意及时记录对应于2t 的2n 。
3、实验前应先对千分尺调零或记录初试读数。
最新MAYA景深做法

MA Y A景深做法大体上就是两种:1、用摄像机里面自带的景深做法2、另外一个就是要用到 Mental Ray 里面的这个节点,链接到摄像机里面的属性的链接。
下面具体讲一下各自的做法一、用摄像机自带的景深,先要打上,接着这个属性里面输进,你的渲染的主要物体到摄像机的距离。
这个距离的测量有两个办法:1、在MAYA里把Display >Heads Up Display > Object Details参数打上界面就会多了其中这个属性就是你选着物体到摄像机的距离,你选着上物体就会显示这个距离的。
2、Create>Measure>Distance Tool点到你物体到摄像机出创建,这个距离输进里面去,或者进行连接。
两种做法的区别,第一种之比较适合做镜头不动的效果就是单帧,第二种就是镜头动的你的景深还是跟着你的镜头动。
二、在摄像机属性里面链接Mental Ray的这个节点,打开节点属性这要属性是这两个,Plane表示目标物体,也就是清晰物体离镜头的距离,注意是Maya中距离数值的相反数。
Radius表示模糊程度,数值越大越模糊。
物体到摄像机的距离链接到Plane这个属性上面去,链接方法和上面一样,不过要注意的是这里的链接属性和Maya中距离数值的相反数,如果用的Create>Measure>Distance Tool进行属性链接的话要连接上一个。
最后先要做出来的景深效果好看的话,就这渲染器设置里面增大MR渲染的采样值。
渲染的效果会好很多。
这是我学习景深的一些心得,景深效果的好坏灯光也很重要,对于景深还有一些别的做法,如用一些景深插件啊,对物体到摄像机具体的大小和景深的模糊度进行连接属性的控制,办法很多,这里只是最简单的做法。
具体步骤也简单,1、把你所要用的所有模型全部选择,然后给一个suface shade,颜色就是黑色。
2、然后渲染设置中,找到maya software ——render options——给他一个environment fog 。
光学系统的景深

短文荟 萃
微 镜 的景深 . 图 2所 示 , 微 镜 的对 准 平 面 为 , 如 显
D
Z 2 Z'
在对准平面前后物点 A 和 A 之间的范 围内, 。 2 其成
可得
1=了 1
一
I+ ) 11
由()( ) 式得 1 、2 两
( 像光束在 的像平面 A 上形成2即为景深 A1 由景 2 能分辨的限度内, AI 的光斑均在人眼所 ) 这一范围 A .
多做实验 . 自己动一下 手就懂得更 多了. 老师要少
讲, 要让学生多做一些实验 . 要提高学 习兴趣 , 就要 动手 , 不然只是一些死知识 . 他还介绍 了他的孩子 ” 读小学三年级时 , 习有关电和磁 的知识时所做的 学 实验 ,所用的仪器设备简单 , “ 就是一组干电池 , 一只
D
P =
瓦
及 M =niu s n
好. 为此 , 需要根据影响景深的因素 出发 , 依据观测 目的进行光学仪器的设计. 本文依据景深 的形成原 理推导的数学表达式并结合两种典型的光学仪器予
以讨论 .
图 1 D表示主面上对应 的光束 口径( 中 入瞳直 径) zz Z分 别为物平 面 A、 I 2 ,、1 2 、 A 、 的物方 截距 , A
z、 Z 分别为对应像平面的像方截距.2 Z 、 1 2 z 一z 即
为景深 .
设该光学系统物 空间和像 空间介质折射率相
1 景 深的 形成原 理
同, 由物像位置公式得
一
按照理想光学系统成像理论 , 如果物空间有一 垂直于光轴的物平面 , 则其像应是一垂直于光轴的
平面像 . 但实际上光学 系统也能使空间的物体成像
和灯泡 , 灯泡一亮 , 就说明有电; 磁铁靠近磁针 , 磁针
光学基础实验--透镜焦距测量不确定度
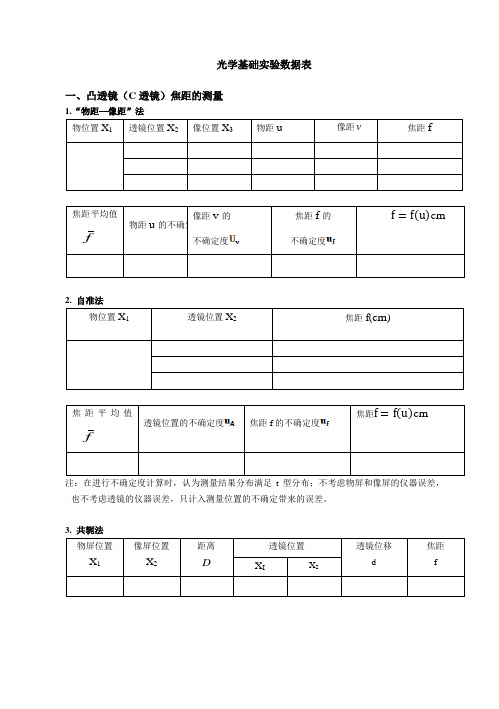
光学基础实验数据表
一、凸透镜(C 透镜)焦距的测量
1.“物距—像距”法
的不确定度
像距v 的
不确定度
焦距f 的 不确定度
2. 自准法
透镜位置的不确定度
焦距f 的不确定度
注:在进行不确定度计算时,认为测量结果分布满足t 型分布;不考虑物屏和像屏的仪器误差,也不考虑透镜的仪器误差,只计入测量位置的不确定带来的误差。
3. 共轭法
二、凹透镜(D透镜)焦距的测量
注:此表中的物位置是指凸透镜第一次成像的位置;表中像位置是指凹透镜成的像的位置。
2. 自准法
三、景深的测量(用C透镜)
光阑孔径与景深的关系:
四、透镜像差的观测(用C透镜)
1. 观测透镜的色差
红色像的位置:X1 = 蓝色像的位置:X2 =
透镜对红光与蓝光的色差:︱X2- X1︳=
2. 观测透镜的球差
中心孔像的位置:X1 = 边缘环像的位置:X2 =
透镜的球差:︱X2- X1︱=。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
测量景深
因为场景太小的关系景深没有我们想要的那么大,在maya中通过测量工具人为去改变景深的大小,我们可以让原本两个很近的物体间的景深变的非常大。
如图两张没有改变距离的物体景深的变化
具体操作步骤:
新建一个场景如图
在渲染面板中选择Luminance Depth亮度深度,然后渲染一下如图:
Luminance Depth是场景默认测量的数值经过转换为rgb值,图中黑白灰代表物体的与摄像机之间的距离,也就是说距摄像机越近的物体颜色越亮,距摄像机越远的物
体颜色越暗,越亮的物体根据近实远虚的原理在后期合成中应越清晰,越暗的物体在后期合成中越模糊,也可以让中景或者背景清晰地情况,根据画面突出主体的不同而不同,有时候在maya中的场景需要非常大,比如建造一座城市,景深要模拟现实,我们需要两个距离很近的物体景深非常大,景深可以随着我们的意愿而调整,在maya中通过测量工具先测量一下摄像机与最远物体的距离如图
如图,在摄像机与远处物体之间会出现两个Locator,并且会显示距离,我们找到距离转化
为rgb的节点打开其属性如图
我们把old max打断,打开测量工具的属性
把distance数值复制给old max如图
在渲染一下如图
很明显背景的物体颜色已经很深了。
Locator越靠近摄像机景深越大,远离摄像机景深越小总结:我们可以通过移动测量工具所创建出来的locator来让物体亮度发生变化达到我们想要的景深效果。
这里需要注意的是每更改一次locator的位置它与摄像机之间的数值会发生一次变化我们需要重新复制一次它的数值给转化节点。