高压线机械除冰车的设计
一种高压线除冰机器人的设计
一种高压线除冰机器人的设计设计了一款基于STC89C52单片机的高压线除冰机器人。
该机器人可通过蓝牙通讯、短信通信和自我检测完成在高压线上的行走、除冰和数据实时监测等功能。
通过实验室测试和调整,较好地实现了预期功能。
标签:机械除冰;光强检测;高压线路Abstract:A high-voltage deicing robot based on STC89C52 microcontroller is designed. The robot can perform the functions of walking,deicing and data real-time monitoring on high-voltage lines through Bluetooth communication,short message communication and self-detection. Through the laboratory test and adjustment,the expected function is well realized.Keywords:mechanical deicing;light intensity detection;high voltage line改革开放以来,我国的电力行业得到迅速发展,电网覆盖面积扩大,线路走廊穿越的地理环境更加复杂,输电线路冰灾事故更为频发。
严重的输电线路覆冰会导致杆塔倾斜、倒塌、断线,绝缘子闪络,而且线路不均匀覆冰和不同期脱冰还会引起导线舞动现象,这些情况会引发线路跳闸、供电中断等事故,给工农业生产和人民生活造成严重影响。
目前,国内外除冰方法有30余种,根据除冰机理可分为机械除冰法与热力融冰法两类。
机械除冰方法能耗较小,但是除冰效率低,而且一般需要人工参与;热力融冰较机械除冰速度快,安全性高,但实际应用中限制因素太多,不能广泛适用。
对于较为严重的导线覆冰一般以人工上线除冰最为有效,但人工除冰危险性很高且效率较低。
高压线路除冰机械(二)

• 1:怎样让除冰器能够在电线上更加稳 定的工作。 • 2:通过怎样的机械来实现高效简洁的 清除结冰。 • 3:如何使机械实现处理复杂环境下的 的任务
工作机械部分(除冰部分,悬挂部分) 动力部分 (驱动部分齿轮,传动部分) 远程操作部分监控部分,遥控部分) 升降机部分
除冰部分
• 除冰部分是传动部分与破冰 锤组 成的咬合破冰器,图中 的轮子为保险轮前后各一对 主要作用为保持机械在一条 直线上。破冰锤通过齿轮传 递的动力往复式不停的敲碎 电线上的覆冰 • 机械挂钩:主要用于 • 跨越障碍,或机械的
• 传动部分上采用直升机共轴双 桨螺旋 扭矩机理大大减小惯性力 的副作用,增大高空作业 的稳定性,与安全性。 • 活动机械臂心走轮组合 : 机械臂可以实现机械的简 单挂靠而机械臂上面的上 下齿轮咬合部分可以将电 线牢牢的卡在齿轮中间, 避免因电线 摇晃而与机
器脱离的现象
• 升降机的妙用:升降机在机械工作的时候下降,降低 机械整体的重心,使之机械不容易晃动,其次升降机 还负责把机械运输上电线,提供燃料等重要作用。
• 上下移动
悬挂部分
• 悬挂部分主要由行走轮与机 械臂组成。机械臂下方的齿 轮与上方齿轮咬合起到固定 电线的作用同时又可以传递 动力 行走轮是中间为凹槽两边为 齿轮 的结构 中间的凹槽部 分为 橡胶,主要是为了减小 由钢 丝与铝丝组成的电线的 磨损,同时还可以增大行走 轮与电线的摩擦。两边的齿 轮是与下面的传动轮啮合, 固定电线,获取前进的动力
工作原理简介
•
首先升降机机缓缓将机械拉升至电 线正下方很近的位置,打开前后两个 固定轮,把机械固定在电线上,然后 启动机械将行走轮紧紧的压合在电线 上,将机械下半部分稍稍下移,启动 发动机,运行一段时间,待到机械运 行稳定时,除冰工作就可以开始了。 工作结束后,打开行走轮,保险轮, 用绕线机将机械缓缓降下来,取下挂 钩。
高压线除冰机器人本体结构设计
1 除 冰 机 器 人 的 总体 设计
机 器 人 是 一 个 复 杂 的 机 电一 体 化 系 统 。涉 及
到 机械 结构 、 自动控 制 、 通信 技 术 等多 个领 域 。 但
机 械 结 构 是 整 个 系 统 的基 础 ,也 是 制线 路上 的高
1 3 2 0 2 1 )
赫
( 北华 大 学 机 械 工程 学 院 ,吉林 吉林
摘
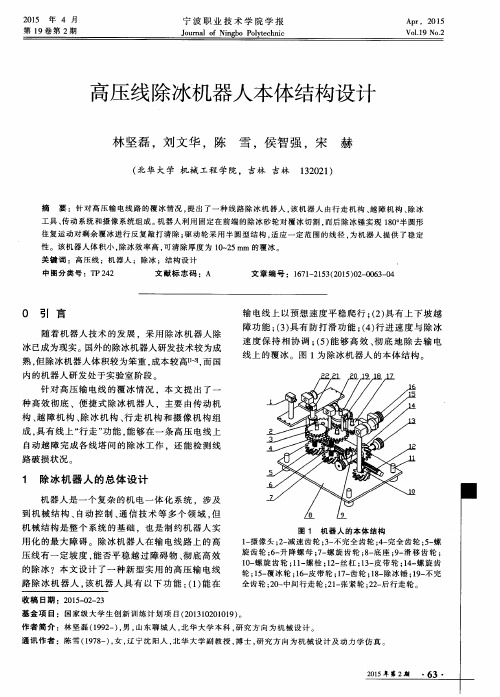
要 :针 对 高 压 输 电 线 路 的 覆 冰情 况 , 提 出 了一 种 线 路 除冰 机 器 人 , 该 机 器 人 由行 走 机 构 、 越 障机构 、 除 冰
工具 、 传 动 系统 和 摄 像 系 统 组成 。 机 器人 利 用 固定 在 前 端 的 除 冰 砂 轮对 覆 冰 切 割 , 而后除冰锤实现 1 8 0  ̄ 半 圆 形 往 复 运 动 对 剩余 覆 冰进 行 反 复 敲 打 清 除 ; 驱 动 轮 采 用 半 圆型 结 构 , 适 应 一 定 范 围的 线 径 , 为机 器人 提供 了稳 定
冰已成为 现实 。国外 的除冰机器人研发技术较为成 熟, 但 除冰机器人体积较为笨重 . 成本较 高[ 1 - 3 1 . 而国 内的机器 人研发 处于实验室 阶段 针对 高压输 电线 的覆 冰情 况 .本 文提 出了一
种 高效彻 底 、便捷 式 除冰机器 人 ,主要 由传动 机
构、 越 障机 构 、 除 冰机 构 、 行走 机 构 和摄像 机 构 组 成, 具有线 上 “ 行走” 功能 , 能 够在一 条高压 电线 上 自动越 障完成各 线塔 间的除 冰工作 ,还能 检测 线
2 除冰 机 器 人 的机 构 设 计
2 . 1 传 动 机 构 的 设 计
高压输电线路除冰机器人的机构设计
第30卷 第6期2008年12月三峡大学学报(自然科学版)J of China Three G orges Univ.(Natural Sciences )Vol 130No.6Dec 12008收稿日期:2008208223通讯作者:张 屹(1976-),男,副教授,博士后,主要研究方向为机电系统现代设计方法.高压输电线路除冰机器人的机构设计张 屹 邵 威 高虹亮 罗 成 杨 旸(三峡大学机械与材料学院,湖北宜昌 443002)摘要:在分析高压输电线路巡检工作的特点和国内外高压输电线路巡线机器人的发展现状和发展趋势的基础上,结合高压输电线路上覆冰的去除方法,主要介绍了设计的一种新型的高压输电线路除冰机器人.该机器人结构简单,可以在输电线上稳定地行走,能够较好地解决自主越障的问题,完成输电线上的除冰任务,具有广泛的应用前景.关键词:除冰机器人; 输电线路; 越障; 除冰中图分类号:T H112 文献标识码:A 文章编号:16722948X (2008)0620069204Mechanical Design of a Robot for Deicing T ransmission LinesZhang Y i Shao Wei Gao Hongliang L uo Cheng Yang Yang(College of Mechanical &Material Engineering ,China Three G orges U niv.,Y ichang 443002,China )Abstract A new robot for t ransmission lines deicing is designed ,based on analyzing t he characters of trans 2mission lines inspection and t he advance of t he robot for inspection of t ransmission lines at home and abroad ;and deicing combining t he met hods of t ransmission lines.The frame of t his robot is very simple.It can walk on t he t ransmission lines ,and solve t he p roblem of spanning t he barrier it self better ,and complete t he deicing task basically.The robot has a broad p rospect of application.K eyw ords deicing robot ; t ransmission lines ; spanning t he barriers ; deicing 随着我国经济的高速发展,超高压大容量输电线路越建越多,线路走廊穿越的地理环境更加复杂,如经过大面积的水库、湖泊和崇山峻岭,给线路维护带来很多困难.而且在严冬及初春季节,我国云贵高原、川陕一带及两湖地区常出现雾凇和雨凇现象,造成架空输电线路覆冰,使线路舞动、闪络、烧伤,甚至断线倒杆,使电网结构遭到破坏,安全运行受到严重威胁.在紧急情况下,寻道员用带电操作杆或其它类似的绝缘棒只能为很少的一部分覆冰线路除冰,人工除冰有很高的危险性[1].在国外,一些国家的地理与气候情况与我国相似,甚至一些国家的情况更加恶劣,为了保证电力系统的可靠性,提高高压输电线除冰的效率,减少损失,维护工人的安全,开发一种可以替代或部分替代工人进行除冰作业的新型设备一直是国内外相关研究的热点.因此,研制安全有效的除冰机械以代替人进行导线除冰具有较好的应用前景和实用意义.文章提出的除冰机器人即为一种既安全又有效的除冰装置.1 高压输电线路除冰机器人的机构介绍机器人是一个复杂的机电一体化系统,涉及到机械结构、自动控制、通信、传感器信息融合、电源技术等多个领域.但机械结构是整个系统的基础,也是目前制约机器人实用化的最大障碍.针对这种情况设计了一种新型的实用的高压输电线路除冰机器人,它具有以下一些功能:(1)能在输电线上以预想的速度进行平稳爬行;(2)具有一定的爬坡能力;(3)能够跨越输电线上的防震锤,线夹,绝缘子等障碍物;(4)能够除去输电线上的冰雪.机器人的参数如下:机器人的体积为600mm ×328mm ×526mm (长×宽×高);重量约为15kg ;平稳爬行的速度约为375m/h.机器人的机械结构主要包括平稳爬行机构、越障机构和除冰机构,其总体图如图1所示.图1 机器人的总体图1.1 平稳爬行机构的设计为了使机器人的前行速度达到最快,且前行平稳,此机器人采用行走轮式机构,如图1中的平稳爬行机构.1.2 越障机构的设计机器人的越障机构主要由行走箱机构、升降箱机构、夹紧机构和旋转机构组成.(1)行走箱机构.机器人行走箱机构行走方式的构思来自蠕虫的行走方式.其主要由左、右行走箱机构以及行走螺杆和螺母组成,如图2所示.图2 行走箱机构(2)升降箱机构[2].机器人的升降方式也采用螺杆驱动机构升降的方式.升降箱机构的主要组成为上箱机构和下箱机构以及升降螺杆和螺母组成,如图3所示.(3)夹紧机构[3].夹紧机构的夹紧夹图如图4所示,1为滑槽,升降机构上箱上的伸出轴便在其中滑动,2为轴孔,升降箱下箱机构的伸出轴便从中穿入,而轴便带动夹紧夹在升降箱上箱机构的槽中上下滑动,从而带动夹紧夹顺、逆时针旋转,3为半圆形槽,当夹紧夹到达死点位置时,便夹紧导线.夹紧夹的作用是夹紧导线,其运动方式的简图如图6和图7所示.夹紧夹的松开状态如图5所示,夹紧夹的夹紧状态如图6所示.夹紧夹将导线夹紧,便可保证机器人在越障时不会发生径向和轴向侧翻.(4)旋转机构.旋转机构采用的是一对齿轮的传动,齿轮安装在行走箱机构的行走箱内,如图7所示.1为大齿轮,以键连接的方式与2相连,2为箱座与升降机构的连接,它的作用是将升降机构和箱座连接,3为小齿轮,它靠驱动电机4驱动,4为小齿轮的驱动电机,5为螺母,6为插销,5和6的作用是托住行走箱.当小齿轮旋转时,带动大齿轮的旋转,而大齿轮则通过2带动升降箱机构与除冰机构的旋转.1.3 除冰机构的设计目前国内外已经研究出许多种除冰的方法[4],但是有许多在目前都只是提出,并没有实现.所设计的高压输电线路除冰机器人是在对巡线机器人作设计的基础上添加除冰装置,既可以巡线也可以除冰,结构比较简单,而且效率比较高.所设计的除冰机构分为两个部分,即铣刀部分与楔形块部分.先利用铣刀1从覆冰的中间铣出一条裂缝,覆冰的其它部分便会裂开,其后的楔形块4再对覆冰进行挤压,覆冰便会07三峡大学学报(自然科学版) 2008年12月被挤压掉,导线的除冰便完成.如图8所示.1.铣刀;2.联轴器;3.电机;4.楔形块;5.螺纹孔图8 除冰机构机器人跨越悬垂绝缘子等障碍物时一只手臂悬空,另一只手臂越过绝缘子,而此时障碍物另一侧导线上的覆冰未清除,轮子和铣刀处于一个平面上面,这样就会造成轮子无法在电线上落脚的情况.基于这种情况的考虑,提出了第2套除冰方案.具体示意图如图9所示,采用2个铣刀,其中铣刀中心线和导线中心线垂直,在无障碍物时和上面的除冰装置类似,铣刀电机驱动铣刀旋转除导线两侧面的覆冰,后面的楔形块在机器向前行走的推力作用下可以破碎铣刀未清除的覆冰.当遇到悬垂线夹这样的障碍物时,首先还是行走电机停机,然后启动驱动螺杆运动的电机,使电极正转,在螺杆转动下带动与螺母相连的楔形块以及前面的铣刀一起向前推进,直到将通过悬垂线夹并且将线夹前面的覆冰除掉,直到当一只手臂越障后轮子可以落到导线上面为止.当除完该段覆冰后,螺杆电机反转将刚前进的装置收回,然后再进行如上述的越障动作.图9 第2套方案除冰机构2 高压输电线路除冰机器人的运动过程此机器人采用双臂结构,这样可以满足其在行走时的稳定性,并且在双臂的配合下可以完成相应的姿态调整以完成各种障碍的跨越和除冰[5].机器人的整体机构的三维图如图10所示,由于此机器人的驱动靠的是电机的驱动,因此叙述其运动过程将以电机为线路对整体机构的运动过程作阐述.图10 整体图为了使运动过程分析起来简单,下面将采用机器人的结构简图作分析,机器人的结构简图如图11所示.由于两边机构基本对称,故下面简图只对一边作了运动方式的标注.1.行走箱螺杆驱动电机;2.行走箱螺杆;3、14.旋转机构;4、11.升降箱机构;5、12.夹紧夹;6、11.除冰机构;7、10.螺杆;8、9.行走轮.图11 整体图的简化图而若要完成基本的行走运动、相应的障碍跨越和除冰,那么机器人将要有以下基本的运动形式来互相配合完成基本的行走运动、相应的障碍跨越和除冰.(1)行走运动.双臂依靠8和9前后行走轮,可以在输电上行走,来完成除冰的任务.(2)旋转运动.升降箱机构和除冰机构的整体旋转可以依靠3和14各自的齿轮组旋转来完成.在此机器人中,只需要旋转180°即可.(3)升降运动.机器人的升降可以依靠4和13中各自的螺杆和螺母的相对运动来完成.(4)夹紧运动.夹紧运动不需要电机的驱动来完成,上面已介绍过当4和13升降机构进行升降运动时会带动夹紧夹夹紧或松开输电线.(5)移行运动.当除冰机构采用的是图9的除冰机构时,铣刀的伸出与缩回运动需要依靠7和10的螺杆与螺母的相对运动来完成.由于在输电线上存在多种障碍物,故只对其中一种典型的障碍物防震锤作跨越演示,具体步骤如下.第1步:当前臂接近防震锤时,电机1,2停止,行走轮8和9停止前进,电机5和6打开,前后臂的升17第30卷 第6期 张 屹等 高压输电线路除冰机器人的机构设计降螺杆顺时针旋转,带动升降箱下箱和行走箱一起上升,夹紧夹5顺时针旋转和夹紧夹12逆时针旋转,当俩夹紧夹夹紧输电线时,电机5和6关闭.采用第2套除冰机构,打开除冰机构的驱动电机,通过冰刀在伸出和缩回的过程中,将防震锤后方输电线上的一段冰除去,以便前臂的行走轮8安放.如图12所示.第2步:前臂的电机5打开,前臂的升降螺杆顺时针旋转,由于后臂的夹紧夹12已将输电线夹紧,前臂中固定在上箱中的螺母向上运动,螺母带动上箱和除冰机构、行走轮向上运动,此时夹紧夹5顺时针旋转,当夹紧夹夹紧输电线时,此时将电机5关闭.打开前臂旋转机构的小齿轮驱动电机7,小齿轮带动大齿轮旋转,当大齿轮逆时针旋转180°后,关闭电机7.打开行走箱行走螺杆的驱动电机9,由于后臂的夹紧夹12将输电线夹紧,故前臂便在行走螺杆和螺母的相对移动下前进,当移动到防震锤后方的不远处,关闭电机9.如图13所示.第3步:打开前臂旋转机构小齿轮驱动电机7,小齿轮带动大齿轮旋转,当大齿轮顺时针旋转180°后,关闭电机7.前臂的电机5打开,前臂的升降螺杆逆时针旋转,升降箱和除冰机构下降,当夹紧夹5将输电线夹紧时,关闭电机5,此时前臂便跃过防震锤.如图14所示.图14 前臂完全落在防震锤另一侧输电线上 第4步:后臂如同前臂过防震锤一样跨越,机器人便恢复到跨越防震锤前的情况.如图15所示.图15 双臂都越过防震锤3 结 论以上所述为高压输电线路除冰机器人机械部分的设计,该机器人为在高压线上自动智能化的作业提供了一个良好的平台,同时该机器人在未结冰季节可以将前面的除冰装置卸掉而换为巡线装置,这样就变成了巡线机器人,达到一机多用的目的.该机器人采用两手臂轮式行走结构,使结构上更为简便,控制上更容易实现,巧妙的线夹装置和仿尺蠖越障行走的方式使得该机器人的的可靠性更高.通过仿真实验表明,该机器人可以在线路上稳定的除冰,同时完全解决了直线段的自主越障问题,变路径自主越障还需要人工辅助,基本上能够较好地完成规定的除冰任务.参考文献:[1] 张运楚,梁自泽,谭 民.架空电力线路巡线机器人的研究综述[J ].机器人,2004,26(5):4672473.[2] 吴俊飞,王新智,姜生元,等.高压线检测机器人吊臂式越障机构的研制[J ].机器人技术,2006(11):35236.[3] 朱兴龙,王洪光,房立金,等.一种自主越障巡检机器人行走夹持机构[J ].机械设计,2006,23(8):11213.[4] 苑吉河,蒋兴良,易 辉,等.输电线路导线覆冰的国内外研究现状[J ].高电压技术,2004,30(1):629.[5] 耿 欣,周延泽.巡线机器人的爬行方案设计[J ].机器人技术与应用,2002(4):19221.[责任编辑 张 莉]27三峡大学学报(自然科学版) 2008年12月。
高压输电线除冰机越障机构机械设计

I N T E L LG E N T R O B O T rq//)
《智能机器人 》April.2018
输 I 线 除冰机 越 障机 构机械 没 汁
山东科技 大学 机械 电子工程学 院 王飞 孙超 王文林 张元坤
摘 要 :高压输 电线 除冰机 是利 用传统 的工具通过 机构运动 方式达到输 电线除冰 的 目的。 由于机械式 除冰技 术效率 高,操作 简单 ,因此在 国内引起极 高的重视。输 电线路覆 冰会 出现 倒杆、线路跳 闸、断线 、通信 中断 等线路事故 ,这 密切关 系到 电网系统的安全运行和 国家经济。因此设计 出一 台高性 能的除冰机 器人 尤为重要 。 最终保证除冰机 器人 能在输 电线上 匀速 平稳 的运动 ,顺利地越过锤 线夹和防震锤 等障碍物 ,达到快速 、有效 、 全 方 位 无 死 角的 除 冰 效 果 。 关键字 :除冰机 ;障碍 ;传动 ;高效
行走
电 机
减速
> 电 机
架空高压输电线除冰机器人设计
块机 构 ,滑块 沿轴线 方向高速 往复滑动 , 冲击头与滑块 固接 ,带动 冲击头沿轴线 方 向以 1 Hz的频率敲打覆冰 。同时 ,发动 5
引言
输 电 线 路 冬 季 因 受冰 雪 危 害 引起 的 供 电中断事故通常都是较严重的, 其修复难度 大、 周期 长 、 电面 积 广 、 响铁 路 交通 。 停 影 因
少 ,效 率 较 低 。 自然被动法 :依靠风 、地球 引力、随 机 散射和温 度变化等 脱冰 的被动方法。该 方法无需附加 能量 ,但随机性 较大 ,不能 保证 可靠除冰 。
m ci T e rb t a o t k s a v na e o ah e n h oo l a e d a t g f a 3
热 力融 冰 法 :利 用 电 流 电 阻 焦 耳 效 应 发 热 融 化 线 上 的 覆 冰 ,这 种 方 法 把 冰 融
2机器人行走模块 .
资料显示 ,国内外高压线巡线机器人
的行走基本采用两种方式 步进蠕动式和轮
式 滚 行 式 。 进 蠕 动式 行 走速 度较 慢 , 缆 步 线 与夹 紧块 比较 , 直径 较 小 , 步行 方 式 的稳 定
化 ,消耗 同样 的 能量 ,所 能 除的 覆冰 较
t e i a d nue h s a it o t e h le n e sr te t bly f h wh { n i oe
性较高 , 且具有跨越障碍的功能;轮式滚行 方式速度快 , 但不平稳 。 本文设计的机器人 行走装置将两者的优点结合 。 三个带槽的轮 子紧紧地将输 电线缆夹紧, 既能达到所需行
p pr w rm t n e fc ̄e wa o rdc h a e m po o e a fe t y t e ue te
输电线路除冰机器人机械部分设计

输电线路除冰机器人机械部分设计随着冬季的到来,气温的逐渐降低,大型输电线路的安全运转也面临较大的挑战。
冰雪天气容易造成输电线路结冰,导致电力设施出现故障,给正常的生产生活带来诸多不便。
为了解决这一问题,研究人员提出了输电线路除冰机器人。
本文重点介绍输电线路除冰机器人的机械部分设计。
一、输电线路除冰机器人的作用传统的输电线路除冰工作主要是通过人工爬上塔杆,使用除冰器具进行除冰。
这种方式存在较高的危险性,不仅造成人手资源浪费,而且也无法保证工作效率和安全性。
输电线路除冰机器人的出现,则解决了这一问题。
除冰机器人采用自动化控制方式,能够直接上升塔杆,通过旋转刷子等方法完成除冰工作。
这不仅提高了工作效率,而且也能够保证工作人员的安全。
因此,输电线路除冰机器人成为了解决输电线路结冰问题的重要装置。
二、输电线路除冰机器人的机械部分设计输电线路除冰机器人机械部分设计的关键在于实现机器人的上升和旋转等动作。
机器人主要包括基座、动臂、机械手爪、除冰刷等部分。
接下来,将分别介绍这些部分的设计。
1. 基座基座是输电线路除冰机器人的重要组成部分,其不仅负责支撑整个机器人,同时也需要实现整个机器人的上升和下降动作。
基座设计应尽量轻巧,同时也能承受机器人自身重量。
通常采用金属制造,基座上设有马达和外壳,以便连接动臂和下一部分装置。
2. 动臂动臂是输电线路除冰机器人的另一重要组成部分,其主要任务是将机器人送到需要进行除冰的导线附近,动臂长度一般为2.5~3.5米之间。
机器人的上升和下降动作是动臂实现的,同时,动臂上也需要设定一些辅助装置,例如,温度和车速传感器,视觉设备等。
在动臂的设计中,应该考虑到动作执行精度和旋转等特殊要求。
3. 机械手爪机械手爪是输电线路除冰机器人的关键装置,其主要任务是用于搭载除冰刷和完成除冰工作。
手爪是由机器人动臂末端延伸的部分,应该能够灵活伸缩。
机械手爪设计需要注意的一个重要问题在于重量,应尽量减轻重量以提高机器人的运动性能。
高压输电线路除冰防冻机器人设计

收稿日期:2019-09-27基金项目:昆明理工大学科学研究基金项目(KKSY201220155)作者简介:谢晓全(1990-),男,昆明理工大学机电工程学院硕士研究生,研究方向为复杂机电系统设计;张晓龙(1976-),男,博士,昆明理工大学机电工程学院副教授、硕士生导师,研究方向为可靠性工程以及生产过程物流优化。
本文通讯作者:张晓龙。
0引言包括我国在内的世界上很多国家都经常发生高压输电线路冰灾事故[1-4]。
2008年初,冰冻事故给中国西南方人民生产生活带来了深重影响,其中南方电网损失极其严重,中国西南地区高原山区高压输电线遭受到大量覆冰侵害而造成高压线塔倒塌、线路短路,供电工作受到了前所未有的挑战。
与此同时,国外包括美国、日本等发达国家在内的很多国家都受到了冰灾事故的严重侵害,线路覆冰已成为亟待解决的问题[5]。
高压线路除冰技术包括热力法融冰、机械法破冰、被动除冰等3类[6-7],其中机械除冰法具有安全性高、无伤亡、不需转移负荷和停电的特点而被广泛采用。
日本东京技术大学Debenest [8]等设计了一款输电线路自动巡线机器人Expliner ,该机器人可实现远程无线操控,在执行巡检任务时可通过调节平衡位置以调节重心,保证机器人行走平稳,但该机器无法完成防冻喷涂工作;中科院沈阳自动化研究所(SIACAS )肖时雨等[9]设计了四臂巡检机器人,该机器人采用尺蠖爬行的行进方式,可以实现越障功能,但该机器人过于笨重,行走不够灵活;加拿大魁北克Quebec 研究院的Toth [10]等研制了输电线路巡线装置Line Scout Mo⁃高压输电线路除冰防冻机器人设计谢晓全,张晓龙,梁文凯,杨磊青,高鹏(昆明理工大学机电工程学院,云南昆明650500)摘要:为了解决我国西南山区高压输电线路覆冰问题,在总结和分析国内外现有除冰技术基础上,以强力除冰、有效防冰为目标,提出“除冰为主,除防结合”的新型除冰、防冰理念。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高压线机械除冰车的设计摘要近年来,我国南方部分地区频繁发生雨雪冰冻灾害,导致输电线表面结冰、重力增大,高压输电线路大面积受损。
为了避免高压线被压坏,保证电力输送的正常进行,就需要将高压线覆冰及时消除。
在通过分析现有除冰技术各种利弊后,提出本文的机械除冰车方案。
本文的目的是设计并制造一种新型的高压线机械除冰车。
论文首先提出了除冰车的整体方案设计及所需解决的主要问题,包括悬挂问题、传动及驱动方式、除冰刀、行走轮和驱动轮的设计。
然后进行了包括轴和除冰刀的设计计算、锁紧机构和调节机构设计的机械部分设计计算以及控制部分的设计,并给出了轴和除冰刀的加工工艺。
论文最后总结了本设计的创新点及特点,并展示了部分实物及试验照片。
本文设计的高压线除冰车不仅除冰方式独特、除冰效率高,而且其自动调节的结构可以减少除冰车在除冰时对高压线的损伤,其体积小,方便人工携带,操作简单,具有广阔的应用前景。
关键词:高压线机械除冰车机械设计控制设计目录摘要 .................................................................................................................................... I I Abstract ............................................................................................. 错误!未定义书签。
1 绪论 (1)1.1 课题来源 (1)1.2 课题的目的和意义 (1)1.3 国内外研究现状 (1)1.4 本文的研究内容 (2)2 总体方案设计 (3)2.1 除冰车的整体设计 (3)2.2 本设计所需解决的问题 (4)2.2.1 机械除冰车在高压线上的悬挂方式 (4)2.2.2 传动方式 (4)2.2.3 驱动方式及控制 (4)2.2.4 除冰刀 (5)2.2.5 行走轮与驱动轮 (5)3 机械部分的设计计算 (6)3.1 后轮轴 (6)3.1.1 前提假设 (6)3.1.2 电机的选择 (6)3.1.3 后轮轴系的估算 (6)3.2 前轮轴 (8)3.3 除冰刀及除冰刀轴 (8)3.3.1 方案比较 (8)3.3.2 除冰刀轴的设计 (10)3.4 锁紧机构 (10)3.4.1 方案比较 (10)3.4.2 锁紧轮的选择 (12)3.4.3 锁紧轴系的估算 (12)3.5 调节机构 (13)3.5.1 方案比较 (13)3.5.2 调节结构的工作原理 (15)4 控制部分的设计 .......................................................................... 错误!未定义书签。
5 典型零件的加工工艺 .................................................................. 错误!未定义书签。
5.1 轴的加工工艺 ........................................................................... 错误!未定义书签。
5.2 除冰刀的加工工艺 ................................................................... 错误!未定义书签。
6 本设计的创新点、实物及试验照片 .......................................... 错误!未定义书签。
6.1 创新点及实物照片 ................................................................... 错误!未定义书签。
6.2 其他特点及实物照片 ............................................................... 错误!未定义书签。
6.3 试验照片 ................................................................................... 错误!未定义书签。
结论 . (16)参考文献 (18)附录相关工程图 (19)1 绪论1.1 课题来源针对恶劣天气导致高压输电线路结冰的现象,创新性的提出并加工出了一种适用于线径为1015mm的高压线除冰破障机械。
1.2 课题的目的和意义在2007~2008新年之际,我国南方发生了特大雪灾。
由于准备工作的不足,雪灾带来的损失和危害非常严重,人们正常的工作和生活受到极大的影响。
雪灾发生后,许多电力工人为了维护电力输送这条生命线,有些人甚至还献出了自己宝贵的生命。
因此,进行早期冰冻灾害的预防,降低灾害破坏程度的研究是非常有意义的。
1.3 国内外研究现状目前国外一般采用喷火器进行高压线除冰,如图1-1所示。
但是成本很高。
图1-1喷火器融冰针对2008年初发生的低温雨雪冰冻灾害,导致南方电网区域的贵州大部分地区、广西桂北地区、广东粤北地区、云南滇东北地区电网设施遭受到严重破坏,西电东送也受到严重影响。
为提高电网对极端气候、重大自然灾害的抵御能力,南方电网启动了包括“直流融冰装置样机研制”重点攻关项目,如图1-2所示。
图1-2直流融冰装置直流融冰技术先进,不需要很大的负荷,一般只需要1至2万千瓦,而且直流输出电压可调,可在一定范围内针对不同长短的单条线路进行融冰,不再需要进行线路串接,操作比较简单,为线路的融冰工作提供了更为简便的方式。
固定式(可控硅)直流融冰装置是采用引入变电站10千伏电源,通过三绕组整流变压器后,送入12脉波可控硅整流器,经整流后输出3000伏/1400安的直流。
该装置可实现输出电压、电流调节功能,可满足城前岭变电站除220千伏城烟线外的其余110千伏及以上电压等级线路的直流融冰。
但采用直流融冰虽是一种切实可行、经济有效的防冰灾措施,但直流融冰装置存在直流输出电流大、大角度大电流长期运行、已建变电站的接入等多项新的问题。
另外,在全国大学生机械创新大赛中也有关于机械除冰装置的设计。
如陕西理工大学在第四届全国机械创新大赛中提出了一种类似爬杆机器人的除冰设备,通过夹紧机构对冰柱施加强大的夹力将冰柱夹碎,或者通过伸缩机构强大的推力将冰条割断来去除高压线覆冰。
综上所述,目前尚没有采用成本低廉、不需要新增复杂装置、采用挤压、震动、切削的三重方式去除高压线覆冰的小型机械。
1.4 本文的研究内容基于已有方案的弊端,本论文提出了并实际加工一种新的适用于高压线除冰设备——悬挂式机械除冰车。
该除冰车最大优势是属于高空破障作业工具,能够克服河流、沟壑等交通工具难以逾越的障碍,采用挤压、震动、切削的三重除冰效果,真正起到预防灾害的目的。
该除冰车的制造成本低、体积小、可靠性高,具有很广阔的市场前景。
论文主要包括以下几个方面的内容:(1)除冰车整体方案的设计及所需解决的技术问题;(2)除冰车机械部分的设计计算,包括前、后轮轴、除冰刀与除冰刀轴的计算,锁紧机构、调节机构的设计;(3)控制部分的设计;(4)典型零件的加工工艺;(5)除冰车的创新点、实物及试验照片展示。
2 总体方案设计本设计所要解决的技术问题是实现机械除冰车在高压线上的行走,让使用者只需要通过小巧的控制器就可以控制除冰车来达到其除冰的效果,并且不能对高压线造成损伤。
为此,除冰车在整体设计上要求结构尽量精简,在高压线上的悬挂和移动方式可靠,传动方式优化,驱动和控制方便,零部件配置合理,除冰刀的形状及碎冰效果能达到预期等。
2.1 除冰车的整体设计图2-1除冰车整体俯视图图2-2除冰车整体右视图图2-3除冰刀局部图本论文提出的除冰车的整体结构如图2-1、2-2所示。
除冰车在工作时,其运动传递过程如下:(1)图2-1中直流电机1带动链轮3传动到链轮4,将运动传递到后轮轴,使驱动后轮转动,并带动行走凹轮转动,从而使整个除冰车在高压线上行走。
(2)直流电机2驱动链轮1传动到链轮2,将运动传递到除冰刀轴,使如图2-3中所示的除冰刀转动。
2.2 本设计所需解决的问题2.2.1 机械除冰车在高压线上的悬挂方式悬挂在高压线上的设备会出现两侧剧烈晃动、坠落、行走不稳定的情况,除冰车也不例外。
为了解决此问题,本设计中除冰车采用摆动原理[1],选择两侧对称结构,其两侧下方分别挂有相对较重的蓄电池和电动机,使得整个除冰车的重心偏下,从而避免上述普通悬挂问题,如图2-2所示。
2.2.2 传动方式链传动是应用较广的一种机械传动。
与带传动相比,链传动能保持准确的平均传动比,传动效率高,径向压轴力小,能在高温及低速情况下工作。
与齿轮传动相比,链传动安装精度要求较低,成本低廉。
除冰车对传动的精度要求不是很高,更重要的一点是链条的长度和松紧可以根据要求不断的调整,能够保证将除冰车的除冰效果调整到最佳,故本设计选择链传动方案[1]。
2.2.3 驱动方式及控制采用两个12V的蓄电池为两个直流电机和两个电动推杆提供电能,并通过链转动来驱动除冰车的行走及除冰刀的转动。
由于此次属于高空作业,为了操作简便,采用无线遥控方式控制除冰车的工作过程[2]。
由于考虑到高压线上的磁场可能对无线遥控系统造成一定程度的影响,所以本设计采用简单的继电器和限位开关来控制电机的正转、反转、启动、停止,如图2-4所示。
图2-4 除冰车行走模拟图2.2.4 除冰刀本设计中,除冰刀中间呈圆形凹面,凹面为周期性波纹曲线,波纹曲面上均匀分布有滚花状的微刃,除冰刀的两侧设计有鹰嘴型的除冰刃。
2.2.5 行走轮与驱动轮行走轮与驱动轮均设计为凹轮,使之能够与高压导线外形贴合。
凹轮采用超耐磨材料,内凹处应粘有人字形橡胶以增大摩擦力,为除冰车在高压线上行走提供必要条件[4]。
通过绕度的计算确定除冰刀和前后轮的相对位置,使结构更紧凑更稳定。
3 机械部分的设计计算3.1 后轮轴3.1.1 前提假设除冰车必须能够除去线径mm 20左右的高压线上包裹的直径为mm 60以上的冰柱,并保证其悬挂在高压线上除冰时的速度达到700米/小时,且除冰刀能够达到min /300r 以上的转速。
3.1.2 电机的选择直流电动机具有良好的启动、制动性能,宜于在广泛范围内平滑调速。
所以本设计选择直流电机[3]。
表3-1 两直流电机的基本参数 型号工作电压()V 工作功率()W 工作转速()min r 01Pattman 244.38 300 02Pattman24 4.38 1003.1.3 后轮轴系的估算图3-1后轮轴(1) 后轮轴最小直径的估算为了实现除冰车的慢速运行,本设计选用表3-2中的02pattman电动机通过链传动带动后轮行走。