abb-伺服电机
ABB机器人伺服电机进油的分析及解决措施

设备管理与维修2019翼8(上)ABB 机器人伺服电机进油的分析及解决措施侯建锦(北京汽车股份有限公司株洲分公司,湖南株洲412000)摘要:针对ABB 机器人伺服电机出现进油现象,导致电机抱闸失效的问题,通过不完全拆卸电机转子刹车盘的方式对伺服电机进行清洁维修,同时给出预防此类故障的相应处理办法。
关键词:伺服电机;油封失效,抱闸失效中图分类号:TP24文献标识码:BDOI :10.16621/ki.issn1001-0599.2019.08.340引言伺服电机是机器的关键部位之一,是机器人的动力来源,也是机器人动作精准的保障。
ABB 机器人的伺服电机与减速箱直接相连,对电机输出端采用轴封的形式,对骨架油封要求较高,在电机高速旋转的状况下,要保持良好密封条件。
骨架油封属于易损件,一旦密封效果下降,会对电机造成较大的故障,在设备维护过程中,防止电机进油与电机进油后的有效处置尤为重要。
1伺服电机进油的危害ABB 机器人伺服电机输出轴与减速箱中间无联轴器,骨架油封一旦失效,减速箱内的润滑油将直接渗透到伺服电机内,电机高速旋转使得润滑油在电机内不断飞溅,最后伺服电机刹车片沾油大大降低摩擦系数,造成抱闸失效,从而引起机器人停止位置不受控制。
由于机器人伺服电机拆卸麻烦,电机进油后不易提前发现,等油渗透到电机后端盖才能发现,而此时刹车盘已经沾满油污,抱闸效果大大降低。
而骨架油封属于易损件,骨架油封一般由橡胶体、骨架和自紧弹簧组成,密封时,骨架油封以其唇部极窄的密封接触面(约0.5mm )与旋转轴以一定的压力接触,在轴上形成一个接触环带,并且形成一层极薄的油膜,这层油膜是骨架油封密封效果和使用寿命的关键。
而这层油膜与骨架油封的唇口材料、唇口与轴的配合以及唇口与轴配合处的润滑有关,任何一个因素的影响都会导致骨架油封的早期失效。
2伺服电机进油解决措施伺服电机主要是由转子、定子、编码器、制动器、轴承组成。
除了比普通电机多了编码器,另外还有一个重要的不同是,伺服电机转子采用永磁体。
伺服电机在舞台灯光中的应用

伺服电机在舞台灯光中的应用在现代舞台灯光设计中,伺服电机起着举足轻重的作用。
伺服电机是一种能够控制运动位置、速度和加速度的高精度电机,其在舞台灯光控制系统中发挥着至关重要的作用。
本文将探讨伺服电机在舞台灯光中的应用及其重要性。
伺服电机在舞台灯光中的首要作用是实现灯光的精准定位。
舞台上的灯光需要随着演出内容的变化而做出相应调整,而传统的固定式灯光无法满足这一需求。
伺服电机通过其精准的位置控制能力,可以确保灯光在舞台上的准确定位,使灯光效果更加精彩纷呈。
另外,伺服电机还能够带动灯光进行流畅的移动。
在现代舞台设计中,灯光的移动是非常常见的,它可以通过变换角度和位置来为观众呈现更加生动的视觉效果。
伺服电机的高速度和高加速度特性使得灯光能够在舞台上迅速而平滑地移动,为表演增添了动感和美感。
此外,伺服电机还可以实现多个灯光的同步控制。
在大型演出中,往往会有多个灯光同时作用,需要它们进行精准的协调。
伺服电机通过控制多个灯光的位置和速度,可以实现它们的同步移动,确保灯光效果的统一和协调。
总的来说,伺服电机在舞台灯光中的应用是不可或缺的。
它通过精准的位置控制、流畅的移动和多个灯光的同步控制,为舞台灯光设计带来了无限可能。
未来随着科技的不断发展,伺服电机在舞台灯光设计中的作用将会越来越重要,为观众带来更加震撼和视觉的享受。
伺服电机的定子的磁场

伺服电机的定子的磁场1. 介绍伺服电机是一种常见的电动机,广泛应用于工业自动化领域。
它通过控制电流来实现精确的位置、速度和力矩控制。
在伺服电机中,定子的磁场起着至关重要的作用。
本文将详细介绍伺服电机定子磁场的原理、特性和应用。
2. 定子磁场的原理伺服电机的定子通常由多个电磁线圈组成,通过通电产生磁场。
定子磁场的产生原理可以通过安培定律来解释。
根据安培定律,通过电流的闭合回路会产生一个磁场,磁场的大小与电流的强度成正比。
在伺服电机中,定子线圈通电后会产生一个磁场,这个磁场会与转子上的永磁体产生相互作用,从而产生转矩。
定子线圈的磁场方向决定了转子上的永磁体受到的力矩方向,从而控制电机的运动。
3. 定子磁场的特性3.1. 磁场强度定子线圈通电后,产生的磁场强度与电流的大小成正比。
通过调节电流的大小,可以控制磁场的强度,进而实现对电机转矩的控制。
3.2. 磁场分布定子线圈的布局和连接方式决定了磁场的分布。
常见的定子线圈布局包括单相、三相和多相等。
不同的布局方式会产生不同的磁场分布形式,从而影响电机的性能。
3.3. 磁场方向定子线圈的通电方向决定了磁场的方向。
根据电流的方向,定子线圈产生的磁场可以是顺时针方向或逆时针方向。
通过控制电流的方向,可以改变磁场的方向,从而控制电机的转矩方向。
3.4. 磁场稳定性定子线圈的磁场稳定性对电机的运行稳定性和性能有重要影响。
定子线圈的设计和制造工艺决定了磁场的稳定性。
如果磁场不稳定,可能会导致电机产生振动、噪音和效率降低等问题。
4. 定子磁场的应用4.1. 位置控制定子线圈产生的磁场可以通过控制电流的大小和方向来实现精确的位置控制。
通过改变磁场的方向和强度,可以使电机转子停留在特定的位置。
4.2. 速度控制定子线圈的磁场变化速度决定了电机的转速。
通过改变磁场的变化速度,可以实现对电机转速的控制。
这在一些需要精确速度控制的应用中非常重要,例如机床、印刷机等。
4.3. 力矩控制定子线圈的磁场与转子上的永磁体相互作用,产生转矩。
ABB 运动控制伺服驱动器错误处理手册说明书
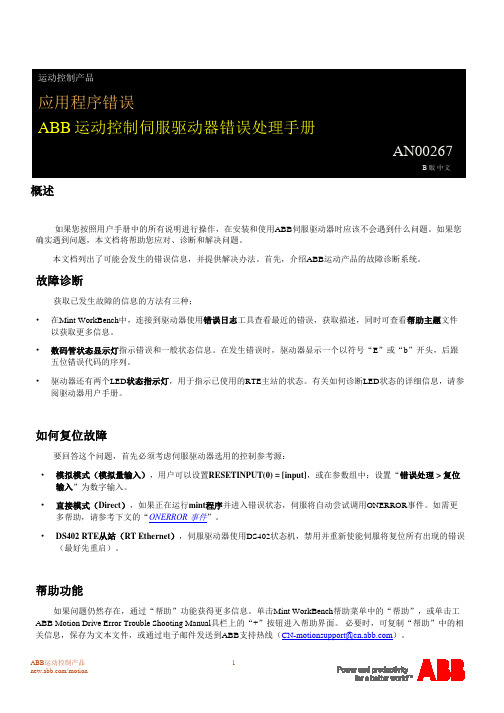
概述如果您按照用户手册中的所有说明进行操作,在安装和使用ABB伺服驱动器时应该不会遇到什么问题。
如果您确实遇到问题,本文档将帮助您应对、诊断和解决问题。
本文档列出了可能会发生的错误信息,并提供解决办法。
首先,介绍ABB运动产品的故障诊断系统。
故障诊断获取已发生故障的信息的方法有三种;•在Mint WorkBench中,连接到驱动器使用错误日志工具查看最近的错误,获取描述,同时可查看帮助主题文件以获取更多信息。
•数码管状态显示灯指示错误和一般状态信息。
在发生错误时,驱动器显示一个以符号“E”或“b”开头,后跟五位错误代码的序列。
•驱动器还有两个LED状态指示灯,用于指示已使用的RTE主站的状态。
有关如何诊断LED状态的详细信息,请参阅驱动器用户手册。
如何复位故障要回答这个问题,首先必须考虑伺服驱动器选用的控制参考源:•模拟模式(模拟量输入),用户可以设置RESETINPUT(0) = [input],或在参数组中:设置“错误处理 > 复位输入”为数字输入。
•直接模式(Direct),如果正在运行mint程序并进入错误状态,伺服将自动尝试调用ONERROR事件。
如需更多帮助,请参考下文的“ONERROR 事件”。
•DS402 RTE从站(RT Ethernet),伺服驱动器使用DS402状态机,禁用并重新使能伺服将复位所有出现的错误(最好先重启)。
帮助功能如果问题仍然存在,通过“帮助”功能获得更多信息。
单击Mint WorkBench帮助菜单中的“帮助”,或单击工ABB Motion Drive Error Trouble Shooting Manual具栏上的“+”按钮进入帮助界面。
必要时,可复制“帮助”中的相关信息,保存为文本文件,或通过电子邮件发送到ABB支持热线()。
重启驱动器术语“重启驱动器”特指:断开交流电源(或直流电源)输入,等待2分钟后再重新供电。
安全________________________________________________________________________警告!仅允许具有资质的电气工程师对驱动器进行维护。
abb伺服枪调整

伺服枪调试手册(简易版本)一、加载伺服枪的参数在机器人的示教器中将伺服枪的外轴配置参数加载到机器人系统中:(和加载EIO文件类似)hd0a:\RobotWare_5.xx\ utility\ AdditionalAxis\ DM1\ ServoGun二、配置电机参数配置电机参数:在Motion中的Motor type中设置以下参数:1、pole pairs 如电机的Pole是8,则pole pairs 是4;2、Ke phase to phase(电压常数): 在电机的铭牌上或者是电机的说明书上通常会有这个参数,或者是另外一个参数Kt Ke=kt/1.732;3、Max current:电机允许的最大电流值,通常在电机的铭牌上有所说明;4、Phase resistance:相电阻,在电机的说明手册上或者是铭牌上会有电机的相电阻值,单位为欧姆,如果给出的参数为相间电阻Rw,则Phase resistance=Rw/2;5、相电感:单位为H,通常在电机的说明书上由这个参数;6、Stall torque:在电机的铭牌和说明手册都有这个参数。
在Stress duty cycle中设置如下参数:1、Speed absolute max: 单位 rad/s, 通常电机给出的是转/分,因此按照如下公式进行换算:Speed rad/s=(2*π/60)* Speed rms2、Torque absolute max: 最大扭矩,Torque absolute max=Ke*1.732*MaxCurrent;如果这个计算的结果大于10,则将Torque absolute max设置为10;在SG Process中将Force control motor torque设置为和Torque absolute max一样大小的值;在Transmission中设置电机的减速比:如果客户已知减速比,则将减速比设置正确,然后通过示教器控制伺服枪的运动,然后运用游标卡尺进行检测伺服枪开口的距离是否和示教器上显示的致。
abb机器人伺服原理

abb机器人伺服原理ABB机器人伺服原理一、引言ABB机器人是瑞典ABB公司生产的一种具有自主运动能力的工业机器人。
它采用伺服控制系统,能够实现高精度、高速度的运动控制。
本文将详细介绍ABB机器人的伺服原理及其工作机制。
二、伺服系统概述伺服系统是指通过对输出位置、速度和力矩进行闭环控制,使得输出与输入信号达到所需的精确匹配。
伺服系统由伺服电机、传感器、控制器和执行器等组成。
伺服电机通过传感器获取机器人当前状态,并将其与控制器中设定的目标状态进行比较,控制器根据误差信号计算出控制命令,通过执行器控制机器人的运动。
三、伺服电机ABB机器人采用交流伺服电机作为执行器。
交流伺服电机由转子和定子组成。
定子上绕有三相绕组,通过交流电源供电,使得定子产生旋转磁场。
转子上装有永磁体,当转子受到磁场作用时,会产生转矩,从而驱动机器人的运动。
四、传感器ABB机器人的传感器主要包括编码器、力传感器和视觉传感器等。
编码器用于测量电机的转角和转速,通过与控制器中的设定值进行比较,计算出伺服电机的误差信号。
力传感器用于测量机器人的受力情况,根据测量结果,控制器可以调整机器人的力矩输出。
视觉传感器用于识别物体的位置和形状,从而实现机器人的精确定位和抓取。
五、控制器ABB机器人的控制器是伺服系统的核心部件。
控制器接收传感器的反馈信号,并根据预设的控制算法计算出控制命令。
控制器还负责监控机器人的状态,保证机器人的安全运行。
六、执行器ABB机器人的执行器主要包括减速器和传动装置。
减速器用于降低伺服电机的转速,并将转矩传递给机器人的关节。
传动装置则将电机的旋转运动转化为机器人的直线或旋转运动。
七、工作机制ABB机器人的工作机制是通过控制器对伺服电机施加电压信号,使其产生旋转磁场,驱动机器人的运动。
控制器根据传感器的反馈信号,不断调整电机的运动状态,使之与预设的目标状态保持一致。
通过不断的反馈调整,机器人可以实现高精度、高速度的运动控制。
南京科远HCSE系列交流伺服用户手册(V1.02)
若在电源和伺服驱动器输入端之间加装接触器,则不允许用此接触器来控制伺服驱动器的启停。一定需要用该接触器控制 伺服驱动器的启停时,间隔不要小于一个小时。频繁的充放电易降低伺服驱动器内电容的寿命。若输出端和电机之间装有接触 器等开关器件,应确保伺服驱动器在无输出时进行通断操作,否则易造成伺服驱动器内模块损坏。 ■ 三相输入改成两相输入
HCSE系列交流伺服 用户手册
(V1.02)
南京科远电子科技有限公司
I
电机机型设置
用户拿到伺服驱动器和电机第一次运行时,请参照适配机型表(如果适配机型表中没有对 应的电机型号,请根据所用电机的额定转速和额定电流,来选择电机机型),确认电机机型设 置是否正确,如果不正确,运行时电机可能会出现振动或误报警现象,不能达到期望的控制效 果。机型参数为Pn223,属于隐藏参数,需要解锁方能进入,在数码管为“run”、”bb”或报 警状态显示界面下,按“上下下下”(一次UP键,三次DOWN键)即可解锁。机型设置正确后, 需重新上电,方可运行电机。以后如果电机型号有变动,则需重新设置。
1314面板按键操作说明1441按键的名称与功能1442基本模式的选择与操作1543状态显示16431位数据显示内容16432省略符号显示内容1644辅助功能模式下的操作fn17441辅助功能执行模式的用户参数一览及其功能17442显示伺服报警记录18443微动jog模式运行18444用户参数设定值进行初始化1945用户参数设定模式下的操作pn20451用户参数的设定2046监视模式下的操作un21461监视模式一览及其功能21462顺序用输入输出信号的监视显示22463指令脉冲计数器反馈脉冲计数器的监视显示2451试运行2452通用功能的设定25521伺服on设定25522超程设定25523伺服off时的停止方法选择2553位置控制运行25531用户参数的设定26532电子齿轮的设定27533编码器反馈信号输出分频系数27534位置指令28535平滑29537外部扭矩限制3054其他31541旋转检测速度31542超速报警功能31543数字输入接脚di输入滤波使能31544伺服控制信号输入input管脚功能配置
ABB运动控制产品使用Mint Workbench设置运动驱动器的说明书

使用Mint Workbench 设置ABB 运动驱动器使用调试向导在数分钟内完成设置介绍本应用说明的目的,是对ABB 运动驱动器配合交流伺服电机运行,并在“调节”后达到可能的最佳性能所需的步骤进行说明。
虽然对感应电机参数做了部分引用,但有单独的应用说明讨论感应电机的设置和调节。
MicroFlex e190和MotiFlex e180运动驱动器MicroFlex e190和MotiFlex e180是精密的伺服驱动器。
它们被设计用于满足分散型单轴智能解决方案和集中型多轴系统的需要,以便宜的价格提供更高性能。
它们为许多机械应用提供了理想的解决方案,也是机械制造商和系统集成商的理想部件。
在本应用说明中,我们将描述MotiFlex e180的调试过程。
该过程对MicroFlex e190驱动器几乎完全相同。
因此,除非另有说明,本文件中提到MotiFlex e180的地方一般也可用于MicroFlex e190。
所需设备:-运行最新固件的MotiFlex e180伺服驱动器,安装了正确的反馈选件模块-带增量式编码器、SSi 、EnDat 、SinCos 、Hiperface 、SmartAbs 、Resolver 1或BiSS 反馈的BSM 电机-运行Windows 7或者以上版本的PC-使用适当的两端端接的连接器的电机反馈电缆-在电机端有适当的连接器的电机动力电缆-MotiFlex e180的市电电源(如果PHASELOSSMODE 参数设置为0,外形尺寸A 和B 也可使用三相200-480VAC 或单相230VAC 电源)2-以太网电缆1如果使用MicroFlex e190,基于旋转变压器的电机将需要使用旋转变压器适配器OPT-MF-2012如果使用MicroFlex e190,电源应为单相115-240VAC 或三相115-240VAC应用说明使用Mint Workbench调节伺服电机的驱动器 AN00250目录1概述3 1.1推荐的I/O连接3 1.2反馈设备4 1.3电源和电机电源连接5 1.4连接PC52调试向导7 2.1输入应用数据7 2.2查看和修改参数142.2.1修改电机方向142.2.2电机抱闸控制15 2.3理解控制率和控制环16 3电机调节173.1调节前要执行的检查17 3.2初始调节18 3.3无载调节193.3.1测量定子电阻和电感203.3.2计算电流环增益203.3.3测试反馈203.3.4测量电压常量20 3.4有载调节213.4.1测量惯量233.4.2计算速度和位置环增益23 3.5微调233.5.1微调电流环253.5.2在速度伺服配置下微调速度环253.5.3在速度伺服配置下微调位置环273.5.4在转矩伺服配置下微调位置环30 3.6手动调节333.6.1手动调节电流环333.6.2在速度伺服配置下手动调节速度环343.6.3在速度伺服配置下手动调节位置环363.6.4在转矩伺服配置下手动调节位置环374调节中的调试和故障诊断38 4.1调试“测量定子电阻和电感”39 4.2调试电流环的调节39 4.3调节“测试反馈”39 4.4调试“测量电压常量”40 4.5调试“测量惯量”40 4.6机械因素414.6.1惯量失配414.6.2力顺和添加转矩滤波器415完成调试43 5.1进一步支持44应用说明使用Mint Workbench调节伺服电机的驱动器 AN002501概述1.1推荐的I/O连接如果该过程有任何类型的安全要求,则应在驱动器使用两个安全转矩取消(STO)输入。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
标题:abb-伺服电机
一:触器适用于建筑业和工业领域,如:电机控制、保暖和通风、空调、水泵、提升设备、照明和校正功率因数等。
ABB接触器的规格包括4和5.5KW的微型接触器、高达400kW的接触器组(AC3),建筑用接触器(家用和工业用),拍合式接触器,热过载继电器和电子继电器,以及完整的附件,确保选择灵活性和满足客户需求,公司制造工厂位于海西经济区的核心----美丽的鹭岛厦门。
二:ABB断路器可为快速恢复运行条件(防止故障发生),并提供最好的解决方案,同时可提供最优的电气安装保护。
从微型断路器到高分断能力的塑壳/空气断路器
三:小型断路器多级:ABB断路器可为快速恢复运行条件(防止故障发生),并提供最好的解决方案,同时可提供最优的电气安装保护。
从微型断路器到高分断能力的塑壳/空气断路器
四:变频器主要用于控制和调节三相交流异步电机的速度,并以其稳定的性能、丰富的组合功能、高性能的矢量控制技术、低速高转矩输出、良好的动态特性及超强的过载能力,在变频器市场占据
着重要的地位。