应变式传感器的温度误差及补偿方法
应变片测量温度补偿
应变片测量温度补偿在工业生产和科学研究中,温度是一个非常重要的物理量。
准确地测量温度对于保证产品质量、实现工艺优化以及科学研究的准确性至关重要。
然而,由于环境和材料等因素的影响,传统的温度测量方法往往存在一定的误差。
为了减小这些误差,科学家们设计出了应变片测量温度补偿的方法。
应变片是一种能够感知物体形变的传感器,它可以通过测量物体的应变来间接地推断出温度。
应变片的原理非常简单,它利用了材料在受力下发生形变的特性。
当物体受到外力作用时,它会发生形变,而应变片可以感知到这种形变,并将其转化为电信号输出。
通过对应变片输出的电信号进行分析,我们就可以获得物体的应变情况,从而推断出物体的温度。
然而,应变片的测量结果并不总是准确的。
这是因为应变片的输出信号不仅受到温度的影响,还受到其他因素的干扰。
为了排除这些干扰因素对温度测量结果的影响,科学家们引入了温度补偿的概念。
温度补偿是一种通过测量其他参量来消除应变片输出信号中温度引起的误差的方法。
具体而言,科学家们通过同时测量物体的温度和其他参量(如应变、压力等),并建立起它们之间的数学模型。
通过分析这个数学模型,我们可以根据其他参量的测量结果来推断出物体的温度,从而实现温度补偿。
温度补偿的关键在于建立准确的数学模型。
这个数学模型需要考虑到应变片的特性、物体的材料参数以及其他参量的影响。
科学家们通过大量的实验和理论分析,不断改进和完善数学模型,以提高温度补偿的准确性和可靠性。
温度补偿在工业生产和科学研究中有着广泛的应用。
例如,在汽车制造中,应变片测量温度补偿可以用于发动机的温度监测,从而实现对发动机工作状态的准确控制。
在航天器的设计中,应变片测量温度补偿可以用于航天器表面温度的实时监测,以保证航天器的安全运行。
在材料科学研究中,应变片测量温度补偿可以用于材料的热膨胀系数的测量,从而帮助科学家们理解材料的热力学性质。
应变片测量温度补偿是一种有效提高温度测量准确性的方法。
电阻应变式称重传感器的原理和补偿

Us+
Rc
Ni
TKc
Re
Um+
Ra
So
3 *
Us-
Ni Rc
Ni TKo
Um-
Ra
Ra = output resist. adjustm.
Re = input resist. adjustm.
So = Zero adjustment
Rc = Span adjustment
TKc
Tko = Temp. adjustm. zero
13 安全超载:150%F.S
14 极限超载: 300%F.S
0
15 防护等级:IP67 0
卸载 滞后 加载
综合误差
非线性 理想直线
载荷
额定载荷
整理课件
基本补偿电路
称重传感器电路补偿的主要项目有
●零点温度补偿 ●零点输出补偿
Us+Rc Ni NhomakorabeaRe
●灵敏度温度补偿(弹性模量补偿)
●灵敏度标准化调整 ●输出电阻标准化调
Uo R1R3R2R4 Ui (R1R2)(R3R4)
平衡R 条 1R 件 4时 U : 00
R2 R3
整理课件
零点输出补偿电路
零点输出补偿电阻的计算
I Ui Ui 2RRZ 2R
Uo
IRZ
Ui •RZ 2R
RZ
2R Ui Uo
U0:补偿前零点输出电压值
Rz:补偿电阻的值
整理课件
3.灵敏度温度补偿
0.03~0.05%/℃即 温度每变化10℃,灵敏度变化2%~5%~~这 个也太大了~~
思路:温度变化使E/Ui保持不变-灵敏度S就可以保持不变;
电阻应变传感器的温度误差及其补偿

➢ 由于温度变化引起电阻应变片阻值的变化与被测量引起的阻值的变化几乎 有相同的数量级。
➢ 若不采取适当的补偿措施,电阻应变传感器将无法工作。 ➢ 引起温度误差的主要因素有:
1. 应变片本身电阻随温度的变化引起误差。该项温度误差可用半桥或全桥 测量电路获得较好的补偿效果。
2. 应变片材料的线膨胀系数与基底材料的线膨胀系数不同引起温度误差。 为消除该项温度误差主要是采取应变片自补偿方法,在制造传感器时已 加以考虑。
对使用者来说,最好的补偿方法是采用半桥或全桥测量电路。
返回首页
3.1的弹性模量随温度变化引起的误差。 ➢ 电阻应变片制造好后,用粘合剂粘贴到测试件上成为电阻应变传感 器。被测量作用于测试件下,应变片跟着测试件产生机械变形,从 而形成电阻应变片阻值发生变化。 ➢ 由于测试件的弹性模量随着温度的增加而减小,在被测量不变的情 况下,应变片产生的应变量增加。
➢ 因此,传感器桥路输出电压随温度的增加 而增加,从而引起温度附加误差。该项误差 不能采用半桥或全桥测量电路加以克服,必 须采用适当的补偿措施。
Uo
U 2
k (1
)
U () k() C 2
图3-T8 弹性模量的温度补偿
电阻应变式传感器的温度误差及其补偿.
电阻应变式传感器的温度误差及其补偿
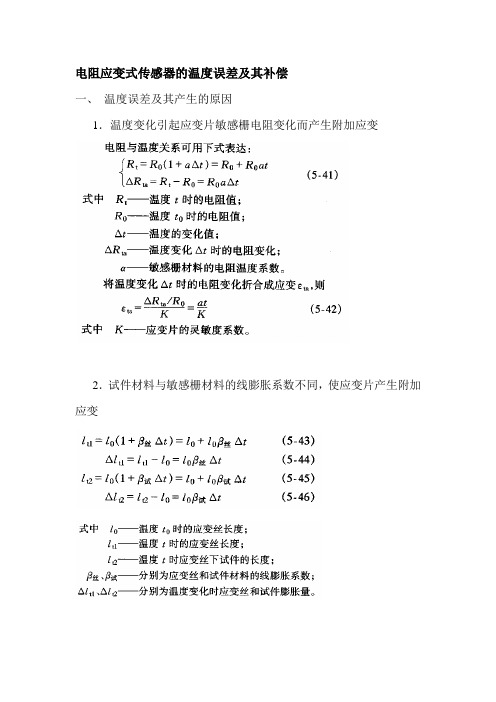
一、温度误差及其产生的原因
1.温度变化引起应变片敏感栅电阻变化而产生附加应变
2.试件材料与敏感栅材料的线膨胀系数不同,使应变片产生附加应变
二、温度补偿方法
1.桥路补偿法
结构:补偿应变片粘贴于补偿块上(与试件相同的材料),补偿块不受应力。
电路:测量片与补偿片构成半桥(全桥)差动电路。
原理:温度变化引起的应变片电阻变化为相同方向,通过电桥消除影响。
2.应变片自补偿法
方法一
结构:特殊材料构成应变片。
原理:使温度与线膨胀产生的附加应变相互抵消或减小。
条件:
缺点:局限性大。
一种应变片只能用于一种试件材料。
方法二
结构:用两种不同材料构成应变片。
原理:两种不同材料的温度系数不同,选择适当的材料,使电阻变化减小或消除。
条件:。
电阻应变式传感器误差原因以及补偿方法
3.1 对于温度误差我们采用线路补偿法和应变 片自补偿
作者简介 袁明(1998-),男,江苏省盐城市人。大学 本科学历,就读于西北民族大学电气工程及其
(1)线路补偿法即采用电桥补偿法。我 自动化专业。
们将工作应变片 R2 和补偿应变片,二者完全 相同,且都贴在同样材料的试件上,并处于同 样的温度下,这样由于温度变化让工作片产生
• Power Electronics 电力电子
电阻应变式传感器误差原因以及补偿方法
文/袁明
摘
本文主要讲述电阻式应变式
传感器在实际的应用当中产生误 要 差的原因以及提出针对性的解决
方 法, 电 阻 式 应 变 式 传 感 器 基 于
的 效 应 是 金 属 电 阻 的 应 变 效 应,
而在实际的应用当中由于温度对
3 补偿的方法
通过采用电子电路组成压力变送器和温 度变送器,再通过 A/D 转换,送计算机进行 处理,通过编辑程序可以使粘贴在试件上的应 变片,在不承受载荷的条件上,电阻可以不随 时间变化,从而解决零漂的问题。
4 结束语
电阻应变式传感器应用于很多领域,并 且随着科技的发展对于精度的要求越来越高, 而电阻式应变片存在的温度误差以及制造工艺 不精确存在的零漂这两个问题对于精度的影响 很大,因此本文针对性的提出了补偿方法,最 为广泛使用的就是电桥补偿法然后在配用计算 机处理从而对电阻式传感器精度进行提高,对 于电阻式传感器未来的发展有着重要的意义。
3.2 对于制造工艺不精确所引起的零漂现象, 我们可以通过计算机电路进行处理
【关键词】电阻应变传感器 零漂 温度误差 补偿方法
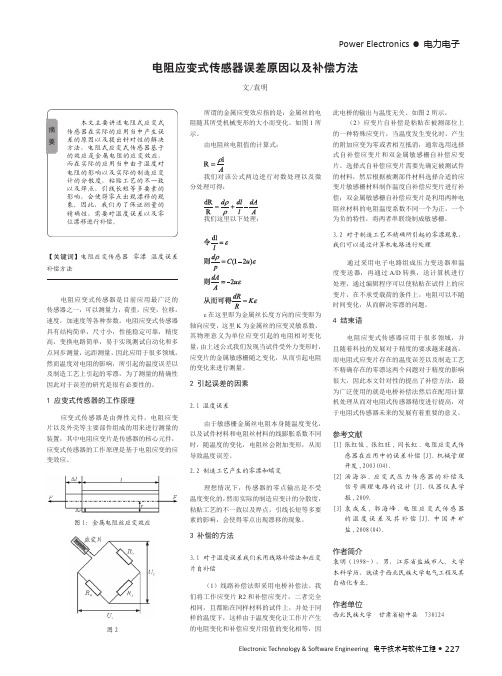
电阻应变式传感器是目前应用最广泛的 传感器之一,可以测量力,荷重,应变,位移, 速度,加速度等各种参数。电阻应变式传感器 具有结构简单,尺寸小,性能稳定可靠,精度 高,变换电路简单,易于实现测试自动化和多 点同步测量,远距测量,因此应用于很多领域, 然而温度对电阻的影响,所引起的温度误差以 及制造工艺上引起的零漂,为了测量的精确性 因此对于误差的研究是很有必要性的。 1 应变式传感器的工作原理
应变式传感器习题及解答
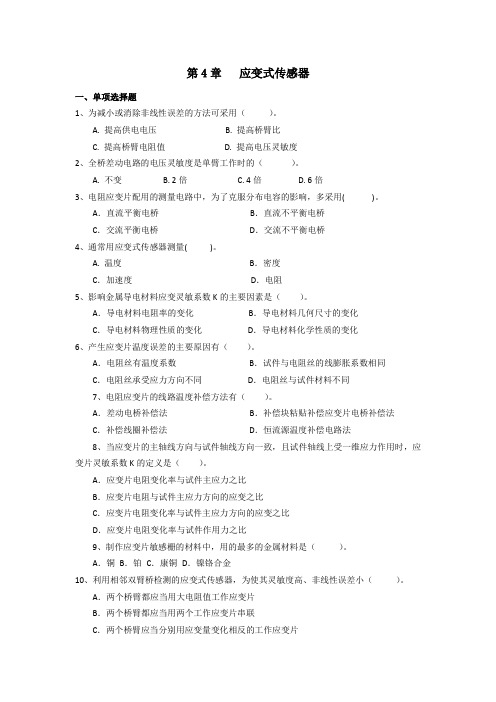
第4章应变式传感器一、单项选择题1、为减小或消除非线性误差的方法可采用()。
A. 提高供电电压B. 提高桥臂比C. 提高桥臂电阻值D. 提高电压灵敏度2、全桥差动电路的电压灵敏度是单臂工作时的()。
A. 不变B. 2倍C. 4倍D. 6倍3、电阻应变片配用的测量电路中,为了克服分布电容的影响,多采用( )。
A.直流平衡电桥B.直流不平衡电桥C.交流平衡电桥D.交流不平衡电桥4、通常用应变式传感器测量( )。
A. 温度B.密度C.加速度D.电阻5、影响金属导电材料应变灵敏系数K的主要因素是()。
A.导电材料电阻率的变化B.导电材料几何尺寸的变化C.导电材料物理性质的变化D.导电材料化学性质的变化6、产生应变片温度误差的主要原因有()。
A.电阻丝有温度系数B.试件与电阻丝的线膨胀系数相同C.电阻丝承受应力方向不同D.电阻丝与试件材料不同7、电阻应变片的线路温度补偿方法有()。
A.差动电桥补偿法B.补偿块粘贴补偿应变片电桥补偿法C.补偿线圈补偿法D.恒流源温度补偿电路法8、当应变片的主轴线方向与试件轴线方向一致,且试件轴线上受一维应力作用时,应变片灵敏系数K的定义是()。
A.应变片电阻变化率与试件主应力之比B.应变片电阻与试件主应力方向的应变之比C.应变片电阻变化率与试件主应力方向的应变之比D.应变片电阻变化率与试件作用力之比9、制作应变片敏感栅的材料中,用的最多的金属材料是()。
A.铜B.铂C.康铜D.镍铬合金10、利用相邻双臂桥检测的应变式传感器,为使其灵敏度高、非线性误差小()。
A.两个桥臂都应当用大电阻值工作应变片B.两个桥臂都应当用两个工作应变片串联C.两个桥臂应当分别用应变量变化相反的工作应变片D.两个桥臂应当分别用应变量变化相同的工作应变片11、在金属箔式应变片单臂单桥测力实验中不需要的实验设备是()。
A.直流稳压电源B.低通滤波器C.差动放大器D.电压表12、关于电阻应变片,下列说法中正确的是()A.应变片的轴向应变小于径向应变B.金属电阻应变片以压阻效应为主C.半导体应变片以应变效应为主D.金属应变片的灵敏度主要取决于受力后材料几何尺寸的变化13、金属丝的电阻随着它所受的机械变形(拉伸或压缩)的大小而发生相应的变化的现象称为金属的()。
第4章 应变式传感器习题及解答
第4章应变式传感器一、单项选择题1、为减小或消除非线性误差的方法可采用()。
A. 提高供电电压B. 提高桥臂比C. 提高桥臂电阻值D. 提高电压灵敏度2、全桥差动电路的电压灵敏度是单臂工作时的()。
A. 不变B. 2倍C. 4倍D. 6倍3、电阻应变片配用的测量电路中,为了克服分布电容的影响,多采用( )。
A.直流平衡电桥 B.直流不平衡电桥C.交流平衡电桥 D.交流不平衡电桥4、通常用应变式传感器测量( )。
A. 温度 B.密度C.加速度 D.电阻5、影响金属导电材料应变灵敏系数K的主要因素是()。
A.导电材料电阻率的变化 B.导电材料几何尺寸的变化C.导电材料物理性质的变化 D.导电材料化学性质的变化6、产生应变片温度误差的主要原因有()。
A.电阻丝有温度系数 B.试件与电阻丝的线膨胀系数相同C.电阻丝承受应力方向不同 D.电阻丝与试件材料不同7、电阻应变片的线路温度补偿方法有()。
A.差动电桥补偿法 B.补偿块粘贴补偿应变片电桥补偿法C.补偿线圈补偿法 D.恒流源温度补偿电路法8、当应变片的主轴线方向与试件轴线方向一致,且试件轴线上受一维应力作用时,应变片灵敏系数K的定义是()。
A.应变片电阻变化率与试件主应力之比B.应变片电阻与试件主应力方向的应变之比C.应变片电阻变化率与试件主应力方向的应变之比D.应变片电阻变化率与试件作用力之比9、制作应变片敏感栅的材料中,用的最多的金属材料是()。
A.铜 B.铂 C.康铜 D.镍铬合金10、利用相邻双臂桥检测的应变式传感器,为使其灵敏度高、非线性误差小()。
A.两个桥臂都应当用大电阻值工作应变片B.两个桥臂都应当用两个工作应变片串联C.两个桥臂应当分别用应变量变化相反的工作应变片D.两个桥臂应当分别用应变量变化相同的工作应变片11、在金属箔式应变片单臂单桥测力实验中不需要的实验设备是()。
A.直流稳压电源 B.低通滤波器C.差动放大器 D.电压表12、关于电阻应变片,下列说法中正确的是()A.应变片的轴向应变小于径向应变B.金属电阻应变片以压阻效应为主C.半导体应变片以应变效应为主D.金属应变片的灵敏度主要取决于受力后材料几何尺寸的变化13、金属丝的电阻随着它所受的机械变形(拉伸或压缩)的大小而发生相应的变化的现象称为金属的()。
测量中应变片的误差分析
温度系数不同, 一个为正, 一个为负的特
性, 将两者串联绕制成敏感栅 。
若 两 段 敏 感 栅 R1 和 R2 由 于 温 度 变
化而产生的电阻变化为大小相等而符号相
反, 就可以实现温度补偿。电阻 R1 和 R2 的
比值关系由下式决定:
R1 R2
=
△R2t/R2 △R1t/R1
(15)
其中( R1t) =-( R2t)
作者单位: 中南大学土木建筑学院
参考文献 [1]王 化 祥 , 传 感 器 原 理 及 应 用[M], 天 津 :天
津大学出版社, 1988.9.30- 31。 [2]栾 桂 冬 , 传 感 器 及 其 应 用[M], 西 安 :西 安
电子科技大学出版社, 2002.1.26- 27。 [3]张 建 民 , 传 感 器 与 检 测 技 术[M], 北 京 :机
引起的电阻变化为
△Rt!=R0S!t!=R0S( !2- !1) △t
( 11)
3、由于温度变化△t 而 引 起 的 总 电 阻
变化为:
△Rt= △Rt"+ △ Rt!= R0 " △t+R0S( !2- !1)
△t
( 12)
这样, 由于温度变化产生的总的虚假
应变量为:
"t=( △Rt/R0) /S=α△t/S+( !2- !1) △t ( 13)
化于人以外的各种设备中, 并由这些设备 与办公人员构成服务于某种目标的人机信 息处理系统。其目的是尽可能充分的利用 信 息 资 源 , 提 高 生 产 率 、工 作 效 率 和 质 量 , 节省时间, 辅助决策、求取更好的经济效 果, 以达到既定的目标。目前的办公自动化 系统是以知识管理为核心, 建立在企业 Intranet 平台上, 旨在帮助企业实现动态的 内容和知识管理。办公自动化表现出以下 特点: 第一, 其应用背景由单纯的模拟手工 办公环境的运用, 向一个要求更高的电子 化协同工作环境转化, 其环境必须为用户 提供一个打破部门界限的网络互动式办公 作业环境; 第二, 对于办公自动化的理念有 了新的定义, 由原先作为企业行政办公信 息化服务的概念, 逐步扩大延伸到企业的 各项业务管理环节, 成为企业运营信息化 和数字化的一个重要组成环节; 第三, 其外 延部分得到了迅速的扩展, 其中知识管理 理念的渗透表现尤为突出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Value Engineering 0引言应变式传感器以电阻应变片为转换元件,应变片粘贴在被测试件表面,由于被测试件的变形使其表面产生应变,从而引起电阻应变片的阻值变化,通过测量电阻的变化即反映了应变或应力的大小。
电阻应变片不仅能够测量应变,而且对其他的物理量,只要能变为应变的相应变化,都可进行测量,如可以测量力、压力、位移、力矩、重量、温度和加速度等物理量。
它结构简单、体积小、测量范围广、频率响应特性好、适合动态和静态测量、使用寿命长、性能稳定可靠,是目前应用最广泛的传感器之一[1-3]。
电阻应变片由于温度变化引起的电阻变化与试件应变所产生的电阻变化几乎有相同的数量级,如果不采取必要的措施克服温度的影响,测量的精度无法保证。
1温度误差产生的原因1.1电阻温度系数的影响应变片敏感栅的电阻丝阻值随温度变化的关系可用下式表示:R t =R 0(1+α0)Δt (1)式中:R t ———温度为t 时的电阻值;R 0———温度为t 0时的电阻值;α0———温度为t 0时金属丝的电阻温度系数;Δt ———温度变化值,Δt=t-t 0。
当温度变化Δt 时,电阻丝电阻的变化值为:ΔR=R t -R 0=R 0α0Δt (2)1.2试件材料和电阻丝材料的线膨胀系数的影响当试件与电阻丝材料的线膨胀系数相同时,不论环境温度如何变化,电阻丝的变形仍和自由状态一样,不会产生附加变形。
当试件与电阻丝材料的线膨胀系数不同时,由于环境温度的变化,电阻丝会产生附加变形,从而产生附加电阻变化。
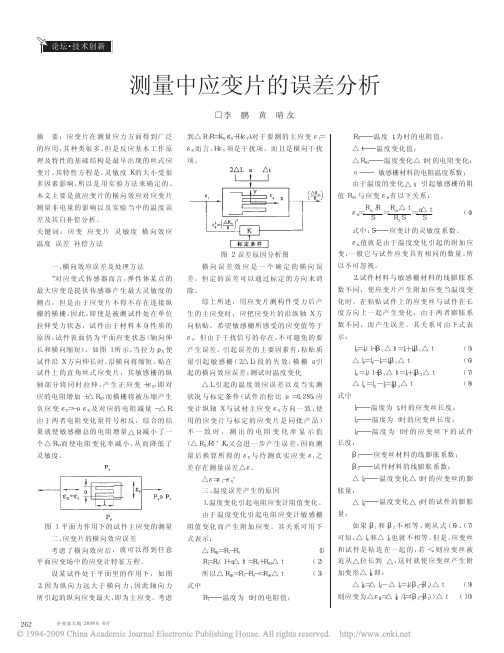
设电阻丝和试件在温度为0℃时的长度均为l 0,它们的线膨胀系数分别为βs 和βg ,若两者不粘贴,则它们的长度分别为l s =l 0(1+βs Δt ),l g =l 0(1+βg Δt )(3)当两者粘贴在一起时,电阻丝产生的附加变形Δl 、附加应变εβ和附加电阻变化ΔR β分别为Δl =l g -l s =(βg -βs )l 0Δt(4)εβ=Δl 0=(βg -βs )Δt ,ΔR t =K 0R 0εβ=K 0R 0(βg -βs )Δt (5)那么由于温度变化而引起的应变片总电阻相对变化量为ΔR t 0=ΔR α+ΔR β0=[α0+K 0(βg -βs )]Δt (6)折合成附加应变量或虚假的应εt ,有εt =ΔR tR 00=αK 0+(βg -βs")Δt (7)由式(6)和式(7)可知,因环境温度变化而引起的附加电阻的相对变化量,除了与环境温度有关外,还与应变片自身的性能参数(K 0,α0,βs )以及被测试件线膨胀系数βg 有关。
温度对应变特性的影响,除了上述两个方面,还将会影响粘合剂传递变形的能力等。
但在常温下,上述两个方面是造成应变片温度误差的主要原因。
2温度补偿方法温度补偿方法通常有线路补偿和应变片自补偿两大类。
2.1线路补偿法电桥补偿是最常用且效果较好的线路补偿。
图1是电桥补偿法的原理图。
电桥输出电压U o 与桥臂参数的关系为:U o =A (R 1R 4-R B R 3)(8)式中,A 为由桥臂电阻和电源电压决定的常数。
由上式可知,当R 3和R 4为常数时,R 1和R B 对电桥输出电压U o 的作用方向相反。
利用这一基本关系可实现对温度的补偿。
测量应变时,工作应变片R 1粘贴在被测试件表面上,补偿应变片R B 粘贴在与被测试件材料完全相同的补偿块上,且仅工作应变片承受应变,如图2所示。
当被测试件不承受应变时,R 1和R B 又处于同一环境温度为t的温度场中,调整电桥参数使之达到平衡,此时有U o =A (R 1R 4-R B R 3)=0(9)工程上,一般按R 1=R B =R 3=R 4选取桥臂电阻。
当温度升高或降低Δt=t-t 0时,两个应变片因温度而引起的电阻变化量相等,电桥仍处于平衡状态,即U o =A[(R 1+ΔR 1t )R 4-(R B +ΔR Bt )R 3]=0(10)若此时被测试件有应变ε的作用,则工作应变片电阻R 1又有新的增量ΔR 1=R 1K ε,而补偿片因不承受应变,故不产生新的增量,此时电桥输出电压为U o =AR 1R 4K ε(11)由上式可知,电桥的输出电压U o 仅与被测试件的应变ε有关,而与环境温度无关。
线路补偿法的优点是简单方便,补偿效果好。
其缺点是在温度变化梯度较大的情况下,很难做到工作片与补偿片处于温度完全一致的情况,因而影响补偿效果。
2.2应变片的自补偿法这种温度补偿法是利用自身具有温度补偿作用的应变片(称之为温度自补偿应变片)来补偿的。
根据温度自补偿应变片的工作原理,可由式(7)得出,要实现温度自补偿,必须有:α0=-K 0(βg -βs)(12)———————————————————————基金项目:国家自然科学基金项目(60572001),河南省教育厅项目(2008B510019)和河南科技厅项目(112300410285)。
作者简介:张宁(1974-),女,河南开封人,硕士,讲师,研究方向为电子信息工程,检测技术等。
应变式传感器的温度误差及补偿方法Temperature Error and Compensation of Strain Sensor张宁Zhang Ning(商丘师范学院物理与电气信息学院,商丘476000)(Department of Physics and Electrical Information ,Shangqiu Normal University ,Shangqiu 476000,China )摘要:分析了应变式传感器在实际应用中由于环境温度变化等因素的影响产生的附加误差,给出了几种温度误差的补偿方法,以提高测量的准确性。
Abstract:This paper systematically analyzes the additional error of resistor sensor in the actual application influenced by the factors such as the ambient temperature.In order to solve this problem,this paper puts forward several methods of temperature compensation to increase the measuring precision to ensure accuracy.关键词:应变式传感器;温度误差;补偿Key words:resistor strain sensor ;temperature error ;compensation中图分类号:TS3文献标识码:A文章编号:1006-4311(2012)04-0011-02·11·价值工程年份就业人数L 就业人数增长率l 年份就业人数L 就业人数增长率l 1995199619971998199920006806568950698207063771394720850.90%1.30%1.26%1.17%1.07%0.97%2002200320042005200620072008737407443275200758257640076990774800.98%0.94%1.03%0.83%0.76%0.77%0.64%表2我国的劳动投入(单位:万人)上式表明,当被测试件的线膨胀系数βg 已知时,如果合理选择敏感栅材料,即其电阻温度系数α0、灵敏系数K 0以及线膨胀系数βs ,满足式(12),则不论温度如何变化,均有ΔR t /R 0=0,从而达到温度自补偿的目的。
3结束语通常情况下,由于电阻应变式传感器设置的场所并非理想,在温度、湿度、压力等的因素影响下,可引起传感器灵敏度的变化和零点漂移现象,成为传感器使用过程中非常严重的问题。
虽然在传感器制作过程中已经采取了相应的措施,使存在的问题得到了很好的解决。
但是,应变式传感器还与应变片和粘接剂的性能、粘贴工艺的制定、结构设置、安装方法都有非常密切的关系,任何一方面都需要精心设计和制作[4-6]。
参考文献:[1]郁有文等.传感器原理及工程应用[M].西安:电子科技大学出版社,2008.[2]康昌鹤等.气温敏感器件及其应用[M].北京:科学出版社,1987.[3]周继明等.传感技术与应用[M].长沙:中南大学出版社,2005.[4]孙艳梅.压力传感器温度补偿的一种新方法[J].光通信研究,2011,(01)62-64.[5]苏亚等.压力传感器热零点漂移补偿各种计算方法的比较[J].传感技术学报,2004,(3):375-378.[6]袁成友,郭海峰.电阻应变式传感器的温度误差及补偿[J].中国矿井岩,2008,7(4):34-35.0引言“科学技术是第一生产力”,科技进步已经成为经济发展的动力。
知识创新、技术创新和高技术产业化是当今国际竞争的核心,技术创新是推动现代产业发展的动力,是经济增长的源泉。
一般用R&D 投入经费指标来反映一国的技术创新水平,用国内生产总值指标来反映一国的经济增长水平。
在过去的几年内我国的R&D 投入经费以及国内生产总之发生了巨大的变化,R&D 投入经费从1987年的74亿元增长到2009年的5802.1亿元,国内生产总值也从12058.6亿元增长到340506.9亿元,这些数据显示我国在技术创新和经济增长上均取得了很大的进步。
技术创新及科技进步对经济增长的贡献如何成为社会共同关注的话题和焦点。
1研究假设1928年美国数学家Charles Cobb 和经济学家Paul Douglas 提出了生产函数数学模型,其函数的一般形式为:Y=AL αK β(α+β=1,0≤α≤1,0≤β≤1)(1)其中Y 为产量,L 和K 分别表示劳动和资本的投入,A 表示技术和结构等因素,α、β均为参数,分别表示劳动的产出弹性和资本的产出弹性。
通过对柯布-道格拉斯函数进行一定的处理就得出著名的索洛模型,即索洛经济增长模型,其模型的形式为:a=y-αl -βk (2)其中,a 为科技进步STP 年增长速度;y 为我国的GDP 年增长速度;l 为研发人员投入RDL 的年增长速度;k 为研发投入RDF 的年增长速度。
α、β分别为RDL 与RDF 的产出弹性,RDL 、RDF 每增加1%时产出相应的增加α%,β%。
按照国家计委和国家统计局推荐的资本弹性系数确定资本、劳动力的弹性系数分别为α=0.65,β=0.35。
运用索洛剩余模型就可以得出科技进步STP 、研发投入RDF 及研发人员投入RDL 等因素对经济增长的影响度:Ea=a/y (3)Ek=βk/y (4)E l =a l /y (5)通过(3)、(4)、(5)式,对Ea 、Ek 、E l 进行求值,就可以分别求出经济增长中STP 贡献率Ea ,RDF 贡献率Ek 和RDL 贡献率E l 的大小。