系统辨识实验二
系统辨识与自适应控制实验

中南大学系统辨识及自适应控制实验指导老师贺建军姓名史伟东专业班级测控1102班0909111814号实验日期2014年11月实验一 递推二乘法参数辨识设被辨识系统的数学模型由下式描述:2341231232.0 1.51()()()1 1.50.70.11 1.50.70.1z z z y k u k k z z z z z zξ---------++=+-++-++ 式中ξ(k )为方差为0.1的白噪声。
要求:(1) 当输入信号u (k )是方差为1的白噪声序列时,利用系统的输入输出值在线辨识上述模型的参数;(2) 当输入信号u (k )是幅值为1的逆M 序列时,利用系统的输入输出值在线辨识上述模型的参数;分析比较在不同输入信号作用下,对系统模型参数辨识精度的影响。
(1)clear all; close all;a=[1 -1.5 0.7 0.1]';b=[1 2 1.5]';d=3; %对象参数na=length(a)-1;nb=length(b)-1; %计算阶次L=500; %数据长度uk=zeros(d+nb,1);yk=zeros(na,1); %输入输出初值u=randn(L,1); %输入采用方差为1的白噪声序列xi=sqrt(0.1)*randn(L,1); % 方差为0.1的白噪声干扰序列theta=[a(2:na+1);b]; %对象参数真值thetae_1=zeros(na+nb+1,1); %参数初值P=10^6*eye(na+nb+1);for k=1:Lphi=[-yk;uk(d:d+nb)]; %此处phi为列向量y(k)=phi'*theta+xi(k); %采集输出数据%递推公式K=P*phi/(1+phi'*P*phi);thetae(:,k)=thetae_1+K*(y(k)-phi'*thetae_1);P=(eye(na+nb+1)-K*phi')*P;%更新数据thetae_1=thetae(:,k);for i=d+nb:-1:2uk(i)=uk(i-1);enduk(1)=u(k);for i=na:-1:2yk(i)=yk(i-1);endyk(1)=y(k);endplot([1:L],thetae); %line([1:L],[theta,theta]); xlabel('k');ylabel('参数估计a,b');legend('a_1','a_2','a_3','b_0','b_1','b_2');axis([0 L -2 2]);(2)clear all;a=[1 -1.5 0.7 0.1]';b=[1 2 1.5]';d=2; %对象参数na=length(a)-1;nb=length(b)-1; %计算阶次L=20; %数据长度uk=zeros(d+nb,1);yk=zeros(na,1); %输入初值x1=1;x2=1;x3=1;x4=0;S=1;%移位寄存器初值,方波初值xi=rand(L,1);%白噪声序列theta=[a(2:na+1);b]; %对象参数真值for k=1:Lphi(k,:)=[-yk;uk(d:d+nb)]'; % phi(k,:)为行向量,便于组成phi矩阵y(k)=phi(k,:)*theta+xi(k); %采集输出数据IM=xor(S,x4);if IM==0u(k)=-1;elseu(k)=1;endS=not(S);M=xor(x3,x4); %产生M序列%更新数据x4=x3;x3=x2;x2=x1;x1=M;for i=nb+d:-1:2uk(i)=uk(i-1);enduk(1)=u(k);for i=na:-1:2yk(i)=yk(i-1);endyk(1)=y(k);End实验二 最小方差自校正控制实验设二阶纯滞后被控对象的数学模型参数未知或慢时变,仿真实验时用下列模型:34112122.5 1.510.5()()()1 1.50.71 1.50.7z z z y k u k k z z z zξ-------++=+-+-+ 式中ξ(k )为方差为0.1的白噪声。
系统辨识试验

2、用普通最小二乘法(OLS)法辨识对象数学模型选择得仿真对象得数学模型如下)()2(5.0)1()2(7.0)1(5.1)(k v k u k u k z k z k z +-+-=-+--其中,)(k v 就是服从正态分布得白噪声N )1,0(。
输入信号采用4阶M 序列,幅度为1。
选择如下形式得辨识模型)()2()1()2()1()(2121k v k u b k u b k z a k z a k z +-+-=-+-+设输入信号得取值就是从k =1到k =16得M 序列,则待辨识参数LSθˆ为LS θˆ=L τL 1L τL z H )H H -(。
其中,被辨识参数LSθˆ、观测矩阵z L 、H L 得表达式为 ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=2121ˆb b a a LS θ , ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)16()4()3(z z z L z , ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=)14()2()1()15()3()2()14()2()1()15()3()2(u u u u u u z z z z z z L H 程序框图如下所示:参考程序:%olsM 序列z=zeros(1,16); %for k=3:16 z(k)=1、endsubplot(3,1,1) %stem(u) %subplot(3,1,2) %画三行一列图形窗口中得第二个图形i=1:1:16; %横坐标范围就是1到16,步长为1plot(i,z) %图形得横坐标就是采样时刻i, 纵坐标就是输出观测值z, 图形格式为连续曲线subplot(3,1,3) %画三行一列图形窗口中得第三个图形stem(z),grid on%画出输出观测值z得经线图形,并显示坐标网格u,z%显示输入信号与输出观测信号%L=14%数据长度HL=[-z(2) -z(1) u(2) u(1);-z(3) -z(2) u(3) u(2);-z(4) -z(3) u(4) u(3);-z(5) -z(4) u(5) u(4);-z(6) -z(5) u(6) u(5);-z(7) -z(6) u(7) u(6);-z(8) -z(7) u(8) u(7);-z(9) -z(8) u(9) u(8);-z(10) -z(9) u(10) u(9);-z(11) -z(10) u(11) u(10);-z(12) -z(11) u(12) u(11);-z(13) -z(12) u(13) u(12);-z(14) -z(13) u(14) u(13);-z(15) -z(14) u(15) u(14)] %给样本矩阵HL赋值ZL=[z(3);z(4);z(5);z(6);z(7);z(8);z(9);z(10);z(11);z(12);z(13);z(14);z(15);z(16)]% 给样本矩阵zL赋值%calculating parameters%计算参数c1=HL'*HL; c2=inv(c1); c3=HL'*ZL; c=c2*c3 %计算并显示%DISPLAY PARAMETERSa1=c(1), a2=c(2), b1=c(3), b2=c(4) %从中分离出并显示a1 、a2、 b1、 b2%End注:由于输出观测值没有任何噪音成分,所以辨识结果也无任何误差,同学们可以在输出观测值中添加噪音,观察ols得辨识效果。
系统辨识实验
实验一:系统辨识的经典方法实验目的:掌握系统的数学模型与系统的输入、输出信号之间的关系,掌握经典辨识的实验测试方法和数据处理方法。
熟悉MATLAB/Simulink环境。
实验内容:1.用阶跃响应发测试给定系统的数学模型在系统没有噪声干扰的条件下通过测试系统的阶跃响应获得系统的一阶加纯滞后或者二阶加纯滞后模型,对模型进行验证。
2.在被辨识系统中加入噪声干扰,重复上述1的实验过程。
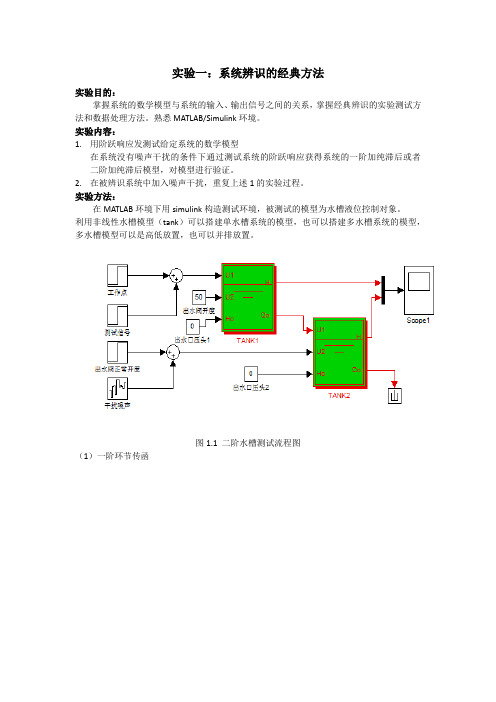
实验方法:在MATLAB环境下用simulink构造测试环境,被测试的模型为水槽液位控制对象。
利用非线性水槽模型(tank)可以搭建单水槽系统的模型,也可以搭建多水槽系统的模型,多水槽模型可以是高低放置,也可以并排放置。
图1.1 二阶水槽测试流程图(1)一阶环节传函利用两点法,找到 , 的点,对应得到 , ; 运用公式得到所以确定(2)二阶环节传函确定找到 , 的点,对应得到 , ;运用公式求的所以确定思考题1()=0.39y t 2()=0.63y t 122=2 1.1-2.3=-0.1t t τ=-⨯212()T t t =-1=1.1t 2=2.3t 122t t τ=-212()=2(2.3 1.1) 2.4T t t =-⨯-=()y y 27.1K ==2.71u u 10∞∆==∆∆1()=0.4y t=9.1t20.909T =1 2.121T =()y y 26.6K ==2.66u u 10∞∆==∆∆实验二相关分析法实验目的:掌握相关分析法测试系统数学模型的过程和方法。
掌握应用移位计数器设计M序列信号发生器的方法。
实验内容:1.设计并实现PRBS伪随机序列信号(M序列)发生器;2.应用相关分析法测试给定系统的数学模型。
使用伪随机序列信号测试系统在有噪声情况下的输出,用相关分析法辨识系统的数学模型。
3.模型验证。
实验方法:测试对象可以与实验一相同。
应用MATLAB/Simulink设计PRBS伪随机信号(M序列)发生器,可以用JK触发器构造的移位计数器实现,也可以用程序实现。
系统辨识实验二

《系统辨识》实验二要点实验二 递推最小二乘估计(RLS)及模型阶次辨识(F-Test )一、实验目的① 通过实验,掌握递推最小二乘参数辨识方法 ② 通过实验,掌握F-Test 模型阶次辨识方法二、实验内容1、仿真模型实验所用的仿真模型如下: 框图表示模型表示)()2(5.0)1()2(7.0)1(5.1)(k v k u k u k z k z k z λ+-+-=-+-- 其中u (k )和z (k )分别为模型的输入和输出变量;v (k )为零均值、方差为1、服从正态分布的白噪声;λ为噪声的标准差(实验时,可取0.0、0.1、0.5、1.0);输入变量u (k )采用M 序列,其特征多项式取1)(4⊕⊕=s s s F ,幅度取1.0。
2、辨识模型辨识模型的形式取)()()()()(11k e k u z B k z z A +=--为方便起见,取n n n b a ==,即nn nn zb z b z b z B z a z a z a z A ------+++=++++= 22112211)(1)(根据仿真模型生成的数据{}L k k u ,,1),( =和{}L k k z ,,1),( =,辨识模型的参数n n b b b a a a ,,,,,,2121 和;并确定模型阶次n ,同时估计出模型误差)(k e 的方差(应近似等于模型噪声)(k v 的方差,即为2λ)和模型的静态增益K 。
3、辨识算法① 采用递推遗忘因子法:[][][]⎪⎪⎩⎪⎪⎨⎧--=+--=--+-=-)1()()(1)()()1()()()1()()1()()()()1()(1k k k μk μk k k k k k k k k z k k k P h K I P h P h h P K h K τττθθθ 其中,遗忘因子10≤<μ(具体值根据情况自已确定);数据长度L 可取100、300、500;初始值⎩⎨⎧==IP 2)0()0(a εθ。
系统辨识实验报告30288
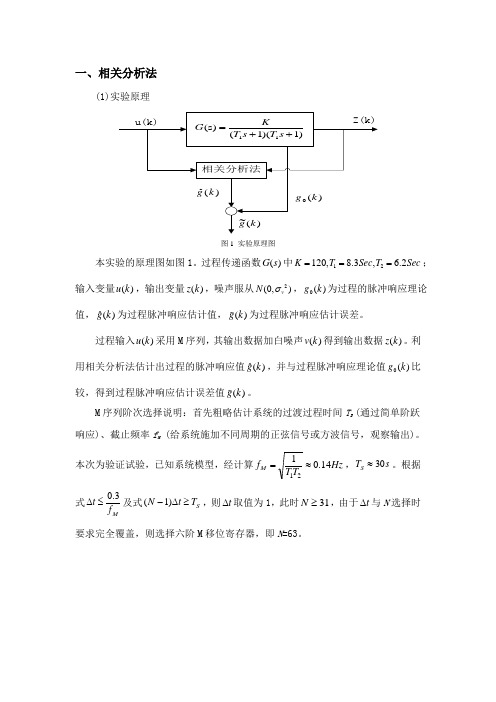
一、相关分析法(1)实验原理图1 实验原理图本实验的原理图如图1。
过程传递函数()G s 中12120,8.3, 6.2K T Sec T Sec ===;输入变量()u k ,输出变量()z k ,噪声服从2(0,)v N σ,0()g k 为过程的脉冲响应理论值,ˆ()gk 为过程脉冲响应估计值,()g k 为过程脉冲响应估计误差。
过程输入()u k 采用M 序列,其输出数据加白噪声()v k 得到输出数据()z k 。
利用相关分析法估计出过程的脉冲响应值ˆ()gk ,并与过程脉冲响应理论值0()g k 比较,得到过程脉冲响应估计误差值()g k 。
M 序列阶次选择说明:首先粗略估计系统的过渡过程时间T S (通过简单阶跃响应)、截止频率f M (给系统施加不同周期的正弦信号或方波信号,观察输出)。
本次为验证试验,已知系统模型,经计算Hz T T f M 14.0121≈=,s T S 30≈。
根据式Mf t 3.0≤∆及式S T t N ≥∆-)1(,则t ∆取值为1,此时31≥N ,由于t ∆与N 选择时要求完全覆盖,则选择六阶M 移位寄存器,即N =63。
(2)编程说明图2 程序流程图(3)分步说明 ① 生成M 序列:M 序列的循环周期63126=-=N ,时钟节拍1t Sec ∆=,幅度1a =,移位寄存器中第5、6位的内容按“模二相加”,反馈到第一位作为输入。
其中初始数据设为{1,0,1,0,0,0}。
程序如下:② 生成白噪声序列: 程序如下:③ 过程仿真得到输出数据:如图2所示的过程传递函数串联,可以写成形如121211()1/1/K Gs TT s T s T =++,其中112KK TT =。
图2 过程仿真方框图程序如下:④ 计算脉冲响应估计值:互相关函数采用公式)()(1)(10k i y i x Nr k R N r i xy +⋅⋅=∑-⋅=,互相关函数所用的数据是从第二个周期开始的,其中r 为周期数,取1-3之间。
系统辨识实验报告
自动化09-3 宋佳瑛09051304系统辨识实验报告实验一:系统辨识的经典方法实验目的:掌握系统的数学模型与系统的输入,输出信号之间的关系,掌握经典辨识的实验测试方法和数据处理方法。
熟悉matlab/Simulink 环境。
实验内容:1.用系统阶跃响应法测试给定系统的数学模型。
在系统没有噪声干扰的条件下通过测试系统的阶跃响应获得系统的一阶加纯滞后或二阶加纯滞后模型,对模型进行验证。
2.在被辨识的系统加入噪声干扰,重复上述1的实验过程。
1.没有噪声搭建对象测试对象流程图实验结果为:2、加入噪声干扰搭建对象实验结果:加入噪声干扰之后水箱输出不平稳,有波动。
实验二:相关分析法搭建对象:处理程序:for i=1:15m(i,:)=UY(32-i:46-i,1); endy=UY(31:45,2);gg=ones(15)+eye(15);g=1/(25*16*2)*gg*m*y; plot(g);hold on;stem(g);实验结果:相关分析法最小二乘法建模:二、三次实验本次实验要完成的内容:1.参照index2,设计对象,从workspace空间获取数据,取二阶,三阶对象实现最小二乘法的一次完成算法和最小二乘法的递推算法(LS and RLS);2.对设计好的对象,在时间为200-300之间,设计一个阶跃扰动,用最小二乘法和带遗忘因子的最小二乘法实现,对这两种算法的特点进行说明;实验内容结果与程序代码:以下给出RLS中的参数估计过程曲线和误差曲线程序清单:LS(二阶):M=UY(:,1);z=UY(:,2);H=zeros(199,5);for i=1:199H(i,1)=-z(i+1);H(i,2)=-z(i);H(i,3)=M(i+2);H(i,4)=M(i+1);H(i,5)=M(i);endEstimate=inv(H'*H)*H'*(z(3:201))RLS(二阶):clcM=UY(:,1);z=UY(:,2);P=100*eye(5); %估计方差Pstore=zeros(5,200);Pstore(:,1)=[P(1,1),P(2,2),P(3,3),P(4,4),P(5,5)]';Theta=zeros(5,200); %参数的估计值,存放中间过程估值Theta(:,1)=[0;0;0;0;0];K=[10;10;10;10;10;10;10];for i=3:201h=[-z(i-1);-z(i-2);M(i);M(i-1);M(i-2)];K=P*h*inv(h'*P*h+1);Theta(:,i-1)=Theta(:,i-2)+K*(z(i)-h'*Theta(:,i-2));P=(eye(5)-K*h')*P;Pstore(:,i-1)=[P(1,1),P(2,2),P(3,3),P(4,4),P(5,5)]';endi=1:200;figure(1)plot(i,Theta(1,:),i,Theta(2,:),i,Theta(3,:),i,Theta(4,:),i,Theta(5,:)) title('待估参数过渡过程')figure(2)plot(i,Pstore(1,:),i,Pstore(2,:),i,Pstore(3,:),i,Pstore(4,:),i,Pstore(5,:)) title('估计方差变化过程')同理可以写出三阶的LS以及RLS算法,此处略去。
系统辨识实验报告

系统辨识实验报告自动化0903班09051302 李姣实验一、系统辨识的经典方法系统的模块如图:(1)、对系统的传递函数进行辨识。
对于一阶系统而言,未加入干扰信号时,其稳定值 t0=20.0,h0=42.2040, 加入干扰信号后其稳定值为 t=40,h1=60.4937。
现在分别取两个点为y1=30%对应的实际点为 h1’=42.2040+(60.4937-42.2040)*30%=47.6909; 根据实际测试值,选取h1’=47.8909,t1’=20.6,对应的 y1’=(47.89*09-42.2040)/(60.4939-42.2040)=0.3109 所以第一个点的取值为 y1’=0.3109;t1’=0.6; 同理可得第二个点的数值为 y2’=0.8033;t2’=2.7; 由公式 :可得 T=1.6750;=0; 由公式可得 k=1.82899(2)、对传递函数进行检验下面对系统的辨识结果进行验证,用一个幅值为10的阶跃信号进行验证,程序如下: num=[1.82899]; den=[1.675,1];()()()()()()2112211212t t T ln 1Y ln 1Y t ln 1Y t ln 1Y ln 1Y ln 1Y -⎧=⎪---⎪⎨---⎪τ=⎪---⎩()y y K u u∞∆==∆∆t=[0:0.1:10];[y,x,t]=step(num,den,t);plot(t,10*y)grid on;title('一阶系统模型的验证');xlabel('仿真时间');ylabel('系统的响应值');set(gca,'xtick',[0:0.5:10]);set(gca,'ytick',[0:1:20]);所得的仿真图形如下,实际系统加入测试信号后0.5s,从workspace中可发现系统的响应值为h=47.0929-42.2040=4.8889;验证是的对应仿真值为h’=4.4720;其误差大小为:(4.8889-4.4720)/4.8889*100%=8.536%;同理,当仿真时间为3.8s时,h=16.3993;h’=16.398;误差大小为:(16.3993-16.398)/16.3993*100%=0.08%;所以经过验证个,可以确定该辨识结果可以反应该系统的传递函数。
系统辨识实验报告
实验一:系统辨识的经典方法一、实验目的掌握系统的数学模型与输入、输出信号之间的关系,掌握经辨辨识的实验测试方法和数据处理方法,熟悉MATLAB/Simulink环境。
二、实验内容1、用阶跃响应法测试给定系统的数学模型在系统没有噪声干扰的条件下通过测试系统的阶跃响应获得系统的一阶加纯滞后或二阶加纯滞后模型,对模型进行验证。
2、在被辨识系统中加入噪声干扰,重复上述1的实验过程。
三、实验方法在MATLAB环境下用Simulink构造测试环境,被测试的模型为水槽液位控制对象。
利用非线性水槽模型(tank)可以搭建单水槽系统的模型,也可以搭建多水槽系统的模型,多水槽模型可以是高低放置,也可以并排放置。
1.噪声强度0.5,在t = 20的时候加入阶跃测试信号相应曲线2.乘同余法产生白噪声A=19;N=200;x0=37;f=2;M=512; %初始化;for k=1: N %乘同余法递推100次;x2=A*x0; %分别用x2和x0表示xi+1和xi-1;x1=mod(x2,M); %取x2存储器的数除以M的余数放x1(xi)中;v1=x1/M; %将x1存储器中的数除以256得到小于1的随v(:,k)=(v1-0.5 )*f;x0=x1; % xi-1= xi;v0=v1;end %递推100次结束;v2=v;k1=k;h=k1;%以下是绘图程序;k=1:1:k1;plot(k,v,'r');grid onset(gca,'GridLineStyle','*');grid(gca,'minor')3.白噪声序列图像020406080100120140160180200-1-0.8-0.6-0.4-0.20.20.40.60.81四、 思考题(1) 阶跃响应法测试系统数学模型的局限性。
答:只适用于某些特殊对象或者低阶简单系统;参数估计的精度有限,估计方法缺乏一般性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《系统辨识与自适应控制》实验报告
题目:最小二乘法在系统辨识中的应用
班级:工控08.1
指导老师:
学生姓名:
学号:
时间:2011.5.19
成都信息工程学院控制工程系
实验目的:
1、掌握系统辨识的基本步骤。
2、熟悉matlab 下系统辨识编程(M 文件)。
3、M 序列的产生方法。
4、用最小二乘法对系统进行辨识。
实验设备:
硬件:计算机一台(参数:主频2.8G 、奔腾4核处理器、内存512M ) 软件:matlab6.5
实验原理:
1、最小二乘法系统辨识结构:
把待辨识的过程看作“黑箱”。
只考虑过程的输入输出特性。
图中,输入u(k)和输出z(k)是可测的;G (错误!未找到引用源。
)是系统模型,用来描述系统的输入输出特性;N (错误!未找到引用源。
)是噪声模型,v(k)是白噪声,e(k)是有色噪声,根据表示定理: 可以表示为
)()()()()(11k v k u q B k z q A +=-- (1) + +
e (k ) 图1 SISO 系统辨识“黑箱”
y (k ) u (k ) z (k )
v (k ) )(1-z N )(1-z G
⎩⎨⎧+++=++++=-------nb nb na
na q b q b b q B q a q a q a q A ...21)(...211)(11211 (2) 由上两式可以表示:
l
k k v i k u bi i k z ai k z nb i na i ,...,2,1)....()(*)(*)(11=+-+--=∑∑== (3) 上式可以描述成如下最小二乘法格式:
)()()(k v k h k z +=θ (4)
2、准则函数
设一个随机序列{}),,2,1(),(L k k z ∈的均值是参数θ的线性函数: {}θ)()(k h k z E T =,其中)(k h 是可测的数据向量,那么利用随机序列的一个实现,使准则函数:
21])()([)(∑=-=L k T
k h k z J θθ (5)
达到极小的参数估计值∧
θ称作θ的最小二乘估计。
最小二乘格式:
)()()(k e k h k z t +=θ,θ为模型参数向量,()k e 为零均值随机噪声。
3、最小二乘问题的解
考虑系统模型:
)()()(k e k h k z t +=θ (6)
准则函数可写成:
()()()θθθL L L T L L H z H -Λ-=z J (7) 极小化准则函数得到:
()L L T L L T L WLS z H H H ΛΛ=-1
ˆθ (8) 通过极小化式(7)计算WLS θˆ的方法称作加权最小二乘法,WLS
θˆ为加权最小二乘估计,若取I L =Λ,则退化为一般最小二乘估计值,对应方法叫最小二乘法:
LS θˆ=L τL 1L τL z H )H H -( (9) 当获得一批数据后,利用式(8)或(9)可一次求得相应参数估计值,对应的LS θˆ称为最小二乘估计值,这样处理问题的方法就称作一次完成算法。
输入信号:伪随机序列(如M 序列);
实验步骤:
1、生成M 序列的,作为输入信号。
2、输入到带辨识系统中测出观测值。
3、通过循环方式给样本矩阵HL 和zL 赋值。
4、根据式(9)计算参数LS θˆ
. 5、从LS θˆ
中分离出并显示出被辨识参数a1, a2, b1, b2 实验方案和结果:
%待辨识系统 z(k)=2*z(k-1)-0.5*z(k-2)+u(k-1)+0.5*u(k-2)+v(k)/600% clear %清理工作间变量
L=16; % M 序列的周期
x1=1;x2=1;x3=1;x4=0; %四个移位积存器的输出初始值
for k=1:L; %开始循环,长度为L
u(k)=xor(x3,x4); %第一个移位积存器的输入是第3个与第4个移位积存器的输出的“或”
x4=x3;x3=x2;x2=x1;x1=u(k);
end %大循环结束,产生输入信号u
plot(u) %绘图M 序列
z(2)=0;z(1)=0; %z 的初始化值
v=randn(16,1); %随机误差干扰
z=zeros(1,16);
for k=3:16
z(k)=2*z(k-1)-0.5*z(k-2)+u(k-1)+0.5*u(k-2)+v(k)/600; %用理想输出值作为观测值
end
H=zeros(16,4); %定义一个H “0”矩阵
for i=3:16
H(i,:)=[-z(i-1) -z(i-2) u(i-1) u(i-2)];%用循环产生H 矩阵
z1(i,:)=[z(i)]; %用循环产生z 矩阵
end
%计算参数%
c1=H'*H;c2=inv(c1);c3=H'*z1;c=c2*c3%带入公式书上3.1.23
a1=c(1),a2=c(2),b1=c(3),b2=c(4)%取出矩阵中上未知数
运行结果:
M 序列图
0246810121416
00.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
结果分析:
最小二乘法辨识是通过求取使误差最小的那一个数来逼近待辨识的参数,但在采样的次数较少,和干扰误差太大的情况下,辨识的误差也会增大。